
RTI Data Distribution Service
The Real-Time Publish-Subscribe Middleware
User’s Manual
Version 4.5c

© 2004-2010 Real-Time Innovations, Inc.
All rights reserved.
Printed in U.S.A. First printing.
June 2010.
Trademarks
Real-Time Innovations and RTI are registered trademarks of Real-Time Innovations, Inc.
All other trademarks used in this document are the property of their respective owners.
Copy and Use Restrictions
No part of this publication may be reproduced, stored in a retrieval system, or transmitted in any form
(including electronic, mechanical, photocopy, and facsimile) without the prior written permission of Real-
Time Innovations, Inc. The software described in this document is furnished under and subject to the RTI
software license agreement. The software may be used or copied only under the terms of the license
agreement.
Third-Party Copyright Notices
Note: In this section, "the Software" refers to third-party software, portions of which are used in RTI Data
Distribution Service; "the Software" does not refer to RTI Data Distribution Service.
• This product implements the DCPS layer of the Data Distribution Service (DDS) specification version 1.2
and the DDS Interoperability Wire Protocol specification version 2.1, both of which are owned by the
Object Management, Inc.
Copyright 1997-2007 Object Management Group, Inc. The publication of these
specifications can be found at the Catalog of OMG Data Distribution Service (DDS) Specifications. This
documentation uses material from the OMG specification for the Data Distribution Service, section 7.
Reprinted with permission. Object Management, Inc. © OMG. 2005.
• Portions of this product were developed using ANTLR (www.ANTLR.org). This product includes
software developed by the University of California, Berkeley and its contributors.
• Portions of this product were developed using AspectJ, which is distributed per the CPL license. AspectJ
source code may be obtained from Eclipse. This product includes software developed by the University
of California, Berkeley and its contributors.
• Portions of this product were developed using MD5 from Aladdin Enterprises.
• Portions of this product include software derived from Fnmatch, (c) 1989, 1993, 1994 The Regents of the
University of California. All rights reserved. The Regents and contributors provide this software "as is"
without warranty.
• Portions of this product were developed using EXPAT from Thai Open Source Software Center Ltd and
Clark Cooper Copyright (c) 1998, 1999, 2000 Thai Open Source Software Center Ltd and Clark Cooper
Copyright (c) 2001, 2002 Expat maintainers. Permission is hereby granted, free of charge, to any person
obtaining a copy of this software and associated documentation files (the "Software"), to deal in the
Software without restriction, including without limitation the rights to use, copy, modify, merge, publish,
distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions: The above copyright notice and this permission
notice shall be included in all copies or substantial portions of the Software.
Technical Support
Real-Time Innovations, Inc.
385 Moffett Park Drive
Sunnyvale, CA 94089
Phone: (408) 990-7444
Email: [email protected]
Website: https://www.rti.com/support
Available Documentation
To get you up and running as quickly as possible, we have divided the RTI® Data Distri-
bution Service documentation into several parts.
❏ Getting Started Guide (RTI_DDS_GettingStarted.pdf)—This document describes
how to install RTI Data Distribution Service. It also lays out the core value and
concepts behind the product and takes you step-by-step through the creation of a
simple example application. Developers should read this document first.
❏ If you are using RTI Data Distribution Service on an embedded platform or
with a database, you will find additional documents that specifically address
these configurations:
• Addendum for Embedded Systems
(RTI_DDS_GettingStarted_EmbeddedSystemsAddendum.pdf)
• Addendum for Database Setup
(RTI_DDS_GettingStarted_DatabaseAddendum.pdf).
❏ What’s New (RTI_DDS_WhatsNew.pdf)—This document describes changes and
enhancements in the current version of RTI Data Distribution Service. Those
upgrading from a previous version should read this document first.
❏ Release Notes and Platform Notes (RTI_DDS_ReleaseNotes.pdf and
RTI_DDS_PlatformNotes.pdf)—These documents provide system requirements,
compatibility, and other platform-specific information about the product, includ-
ing specific information required to build your applications using RTI, such as
compiler flags and libraries.
❏ User’s Manual (RTI_DDS_UsersManual.pdf)—This document describes the fea-
tures of the product and how to use them. It is organized around the structure of
the DDS APIs and certain common high-level tasks.

❏ API Documentation (ReadMe.html, RTI_DDS_ApiReference<Language>.pdf)—
This extensively cross-referenced documentation, available both in HTML and
printable PDF formats, is your in-depth reference to every operation and config-
uration parameter in the middleware. Even experienced RTI Data Distribution
Service developers will often consult this information.
The Programming How To's (available from the main page) provide example
code. These are hyperlinked code snippets to the full API documentation, and
provide a good place to begin learning the APIs. Start by reviewing the Publi-
cation Example and Subscription Example, which provide step-by step exam-
ples of how to send and receive data with RTI Data Distribution Service.
Many readers will also want to look at additional documentation available online. In
particular, RTI recommends the following:
❏ RTI Public Knowledge Base—Accessible from http://www.rti.com/support.
The Knowledge Base provides sample code, general information on RTI Data
Distribution Service, performance information, troubleshooting tips, and other
technical details.
❏ RTI Customer Portal—Accessible from http://www.rti.com/support. The por-
tal provides a superset of the solutions available in the RTI Knowledge Base.
Select the Find Solution link to see sample code, general information on RTI
Data Distribution Service, performance information, troubleshooting tips, and
other technical details. You must have a user name and password to access the
portal; these are included in the letter confirming your purchase. If you do not
have this letter, please contact [email protected].
❏ RTI Example Performance Test—This example application includes code and
configuration files for testing and optimizing the performance of a simple RTI
Data Distribution Service application on your system. The program will test both
throughput and latency under a wide variety of middleware configurations. It
also includes documentation on tuning the middleware and the underlying
operating system.
You can download the test from the RTI Knowledge Base, accessible from http:/
/www.rti.com/support. In the Performance category, look for Example Perfor-
mance Test for RTI Data Distribution Service.
You can also review the data from several performance benchmarks here: http:/
/www.rti.com/products/dds/benchmarks-cpp-linux.html.
❏ Whitepapers and other articles—These documents are available from http://
www.rti.com/resources/.
v
Contents
Available Documentation .........................................................iii
Welcome to RTI Data Distribution Service.................................... xxi
Conventions .................................................................................................................................xxi
Extensions to the DDS Standard..................................................................................xxi
Environment Variables.................................................................................................xxii
Names of Supported Platforms ..................................................................................xxii
Additional Resources.................................................................................................................xxii
Part 1: Introduction
1Overview............................................................................................1-1
1.1 What is RTI Data Distribution Service? ................................................................................1-1
1.2 What is Middleware?...............................................................................................................1-2
1.3 Network Communications Models .......................................................................................1-3
1.4 Features of RTI Data Distribution Service ............................................................................1-5
2 Data-Centric Publish-Subscribe Communications................2-1
2.1 What is DCPS?..........................................................................................................................2-1
2.1.1 DCPS for Real-Time Requirements ..........................................................................2-2
2.2 Data Types, Topics, Keys, Instances, and Samples..............................................................2-4
2.2.1 Data Topics — What is the Data Called?.................................................................2-4
2.2.2 Samples, Instances, and Keys ...................................................................................2-5
2.3 DataWriters/Publishers and DataReaders/Subscribers ....................................................2-7
2.4 Domains and DomainParticipants ......................................................................................2-10
2.5 Quality of Service (QoS)........................................................................................................2-11
2.5.1 Controlling Behavior with Quality of Service (QoS) Policies.............................2-11
2.6 Application Discovery...........................................................................................................2-13
vi
Part 2: Core Concepts
3 Data Types and Data Samples ....................................................3-1
3.1 Introduction to the Type System ........................................................................................... 3-4
3.1.1 Sequences.................................................................................................................... 3-5
3.1.2 Strings and Wide Strings .......................................................................................... 3-6
3.1.3 Introduction to TypeCode......................................................................................... 3-6
3.2 Built-in Data Types.................................................................................................................. 3-7
3.2.1 Registering Built-in Types ........................................................................................ 3-8
3.2.2 Creating Topics for Built-in Types ........................................................................... 3-8
3.2.3 Creating ContentFilteredTopics for Built-in Types ............................................. 3-10
3.2.4 String Built-in Type.................................................................................................. 3-13
3.2.5 KeyedString Built-in Type ...................................................................................... 3-19
3.2.6 Octets Built-in Type ................................................................................................. 3-27
3.2.7 KeyedOctets Built-in Type...................................................................................... 3-36
3.2.8 Managing Memory for Built-in Types .................................................................. 3-45
3.2.9 Type Codes for Built-in Types................................................................................ 3-51
3.3 Creating User Data Types with IDL ................................................................................... 3-52
3.3.1 Variable-Length Types............................................................................................. 3-53
3.3.2 Value Types............................................................................................................... 3-55
3.3.3 TypeCode and rtiddsgen ........................................................................................ 3-56
3.3.4 rtiddsgen Translations for IDL Types ................................................................... 3-56
3.3.5 Escaped Identifiers .................................................................................................. 3-75
3.3.6 Referring to Other IDL Files................................................................................... 3-76
3.3.7 Preprocessor Directives........................................................................................... 3-76
3.3.8 Using Custom Directives........................................................................................ 3-76
3.4 Creating User Data Types with Extensible Markup Language (XML).......................... 3-83
3.5 Creating User Data Types with XML Schemas (XSD)...................................................... 3-91
3.5.1 Primitive Types ...................................................................................................... 3-107
3.6 Using rtiddsgen ................................................................................................................... 3-107
3.6.1 rtiddsgen Command-Line Arguments ................................................................3-111
3.7 Using Generated Types without RTI Data Distribution Service (Standalone)............3-116
3.7.1 Using Standalone Types in C ................................................................................3-117
3.7.2 Using Standalone Types in C++............................................................................3-117
3.7.3 Standalone Types in Java .......................................................................................3-118
vii
3.8 Interacting Dynamically with User Data Types...............................................................3-118
3.8.1 Introduction to TypeCode .....................................................................................3-118
3.8.2 Defining New Types...............................................................................................3-120
3.8.3 Sending Only a Few Fields....................................................................................3-122
3.8.4 Type Extension and Versioning ............................................................................3-123
3.8.5 Sending TypeCodes on the Network...................................................................3-124
3.9 Working with Data Samples...............................................................................................3-125
3.9.1 Objects of Concrete Types......................................................................................3-125
3.9.2 Objects of Dynamically Defined Types ...............................................................3-128
4 DDS Entities ........................................................................................ 4-1
4.1 Common Operations for All DDS Entities ...........................................................................4-2
4.1.1 Creating and Deleting Entities..................................................................................4-2
4.1.2 Enabling Entities.........................................................................................................4-3
4.1.3 Getting an Entity’s Instance Handle ........................................................................4-6
4.1.4 Getting Status and Status Changes ..........................................................................4-6
4.1.5 Getting and Setting Listeners....................................................................................4-7
4.1.6 Getting the StatusCondition......................................................................................4-7
4.1.7 Getting and Setting QosPolicies ...............................................................................4-8
4.2 QosPolicies ..............................................................................................................................4-12
4.2.1 QoS Requested vs. Offered Compatibility—the RxO Property .........................4-16
4.2.2 Special QosPolicy Handling Considerations for C..............................................4-17
4.3 Statuses ....................................................................................................................................4-18
4.3.1 Types of Communication Status.............................................................................4-19
4.3.2 Special Status-Handling Considerations for C.....................................................4-26
4.4 Listeners...................................................................................................................................4-27
4.4.1 Types of Listeners .....................................................................................................4-27
4.4.2 Creating and Deleting Listeners.............................................................................4-29
4.4.3 Special Considerations for Listeners in C .............................................................4-30
4.4.4 Hierarchical Processing of Listeners......................................................................4-30
4.4.5 Operations Allowed within Listener Callbacks...................................................4-32
4.5 Exclusive Areas (EAs)............................................................................................................4-32
4.5.1 Restricted Operations in Listener Callbacks.........................................................4-36
4.6 Conditions and WaitSets .......................................................................................................4-37
4.6.1 Creating and Deleting WaitSets..............................................................................4-38
4.6.2 WaitSet Operations ...................................................................................................4-41
viii
4.6.3 Waiting for Conditions............................................................................................ 4-41
4.6.4 Processing Triggered Conditions—What to do when Wait() Returns ............. 4-42
4.6.5 Conditions and WaitSet Example.......................................................................... 4-44
4.6.6 GuardConditions ..................................................................................................... 4-46
4.6.7 ReadConditions and QueryConditions................................................................ 4-46
4.6.8 StatusConditions...................................................................................................... 4-49
4.6.9 Using Both Listeners and WaitSets........................................................................ 4-50
5Topics..................................................................................................5-1
5.1 Topics......................................................................................................................................... 5-2
5.1.1 Creating Topics........................................................................................................... 5-4
5.1.2 Deleting Topics........................................................................................................... 5-5
5.1.3 Setting Topic QosPolicies.......................................................................................... 5-6
5.1.4 Copying QoS From a Topic to a DataWriter or DataReader.............................. 5-10
5.1.5 Setting Up TopicListeners....................................................................................... 5-10
5.1.6 Navigating Relationships Among Entities............................................................5-11
5.2 Topic QosPolicies................................................................................................................... 5-12
5.2.1 TOPIC_DATA QosPolicy ........................................................................................ 5-12
5.3 Status Indicator for Topics ................................................................................................... 5-14
5.3.1 INCONSISTENT_TOPIC Status ............................................................................ 5-14
5.4 ContentFilteredTopics........................................................................................................... 5-15
5.4.1 Overview...................................................................................................................5-15
5.4.2 Where Filtering is Applied—Publishing vs. Subscribing Side.......................... 5-16
5.4.3 Creating ContentFilteredTopics............................................................................. 5-18
5.4.4 Deleting ContentFilteredTopics ............................................................................. 5-20
5.4.5 Using a ContentFilteredTopic ................................................................................ 5-20
5.4.6 SQL Filter Expression Notation ............................................................................. 5-23
5.4.7 STRINGMATCH Filter Expression Notation....................................................... 5-32
5.4.8 Custom Content Filters ........................................................................................... 5-34
6 Sending Data ....................................................................................6-1
6.1 Preview: Steps to Sending Data ............................................................................................ 6-1
6.2 Publishers ................................................................................................................................. 6-3
6.2.1 Creating Publishers Explicitly vs. Implicitly ......................................................... 6-6
6.2.2 Creating Publishers ................................................................................................... 6-7
6.2.3 Deleting Publishers.................................................................................................... 6-9
ix
6.2.4 Setting Publisher QosPolicies ...................................................................................6-9
6.2.5 Setting Up PublisherListeners ................................................................................6-16
6.2.6 Finding a Publisher’s Related Entities...................................................................6-18
6.2.7 Waiting for Acknowledgments...............................................................................6-18
6.2.8 Statuses for Publishers.............................................................................................6-20
6.2.9 Suspending and Resuming Publications...............................................................6-20
6.3 DataWriters .............................................................................................................................6-20
6.3.1 Creating DataWriters................................................................................................6-24
6.3.2 Deleting DataWriters................................................................................................6-26
6.3.3 Setting Up DataWriterListeners..............................................................................6-26
6.3.4 Checking DataWriter Status....................................................................................6-28
6.3.5 Statuses for DataWriters ..........................................................................................6-29
6.3.6 Using a Type-Specific DataWriter (FooDataWriter) ............................................6-40
6.3.7 Writing Data ..............................................................................................................6-41
6.3.8 Flushing Batches of Data Samples .........................................................................6-43
6.3.9 Writing Coherent Sets of Data Samples.................................................................6-44
6.3.10 Waiting for Acknowledgments...............................................................................6-44
6.3.11 Managing Data Instances (Working with Keyed Data Types)...........................6-45
6.3.12 Setting DataWriter QosPolicies...............................................................................6-49
6.3.13 Navigating Relationships Among Entities ...........................................................6-59
6.3.14 Asserting Liveliness .................................................................................................6-60
6.4 Publisher/Subscriber QosPolicies .......................................................................................6-60
6.4.1 ASYNCHRONOUS_PUBLISHER QosPolicy (DDS Extension).........................6-61
6.4.2 ENTITYFACTORY QosPolicy.................................................................................6-63
6.4.3 EXCLUSIVE_AREA QosPolicy (DDS Extension) ................................................6-66
6.4.4 GROUP_DATA QosPolicy.......................................................................................6-69
6.4.5 PARTITION QosPolicy ............................................................................................6-72
6.4.6 PRESENTATION QosPolicy....................................................................................6-79
6.5 DataWriter QosPolicies .........................................................................................................6-85
6.5.1 BATCH QosPolicy (DDS Extension)......................................................................6-86
6.5.2 DATA_WRITER_PROTOCOL QosPolicy (DDS Extension)...............................6-92
6.5.3 DATA_WRITER_RESOURCE_LIMITS QosPolicy (DDS Extension) ..............6-104
6.5.4 DEADLINE QosPolicy...........................................................................................6-107
6.5.5 DESTINATION_ORDER QosPolicy ....................................................................6-110
6.5.6 DURABILITY QosPolicy .......................................................................................6-113
6.5.7 DURABILITY SERVICE QosPolicy......................................................................6-116
6.5.8 HISTORY QosPolicy...............................................................................................6-118
x
6.5.9 LATENCYBUDGET QoS Policy .......................................................................... 6-123
6.5.10 LIFESPAN QoS Policy........................................................................................... 6-124
6.5.11 LIVELINESS QosPolicy ........................................................................................ 6-125
6.5.12 MULTI_CHANNEL QosPolicy (DDS Extension) ............................................. 6-129
6.5.13 OWNERSHIP QosPolicy....................................................................................... 6-132
6.5.14 OWNERSHIP_STRENGTH QosPolicy............................................................... 6-136
6.5.15 PROPERTY QosPolicy (DDS Extension) .......................................................... 6-137
6.5.16 PUBLISH_MODE QosPolicy (DDS Extension) ................................................. 6-140
6.5.17 RELIABILITY QosPolicy....................................................................................... 6-142
6.5.18 RESOURCE_LIMITS QosPolicy .......................................................................... 6-146
6.5.19 TRANSPORT_PRIORITY QosPolicy .................................................................. 6-151
6.5.20 TRANSPORT_SELECTION QosPolicy (DDS Extension) ................................ 6-152
6.5.21 TRANSPORT_UNICAST QosPolicy (DDS Extension)..................................... 6-154
6.5.22 TYPESUPPORT QosPolicy (DDS Extension)..................................................... 6-157
6.5.23 USER_DATA QosPolicy........................................................................................ 6-158
6.5.24 WRITER_DATA_LIFECYCLE QoS Policy.......................................................... 6-161
6.6 Flow Controllers (DDS Extension).................................................................................... 6-163
6.6.1 Flow Controller Scheduling Policies................................................................... 6-164
6.6.2 Managing Fast DataWriters When Using a FlowController............................ 6-166
6.6.3 Token Bucket Properties ....................................................................................... 6-166
6.6.4 Creating and Deleting FlowControllers ............................................................. 6-169
6.6.5 Getting and Setting Default FlowController Properties for
DomainParticipants............................................................................................... 6-170
6.6.6 Getting and Setting Properties for a Specific FlowController......................... 6-170
6.6.7 Adding an External Trigger.................................................................................. 6-171
6.6.8 Other FlowController Operations ....................................................................... 6-171
7 Receiving Data.................................................................................7-1
7.1 Preview: Steps to Receiving Data.......................................................................................... 7-2
7.2 Subscribers ............................................................................................................................... 7-4
7.2.1 Creating Subscribers Explicitly vs. Implicitly........................................................ 7-9
7.2.2 Creating Subscribers................................................................................................ 7-10
7.2.3 Deleting Subscribers.................................................................................................7-11
7.2.4 Setting Subscriber QosPolicies............................................................................... 7-12
7.2.5 Setting Up SubscriberListeners.............................................................................. 7-19
7.2.6 Getting DataReaders with Specific Samples........................................................ 7-22
7.2.7 Finding a Subscriber’s Related Entities................................................................ 7-23
xi
7.2.8 Statuses for Subscribers ...........................................................................................7-24
7.3 DataReaders............................................................................................................................7-25
7.3.1 Creating DataReaders ..............................................................................................7-29
7.3.2 Deleting DataReaders ..............................................................................................7-31
7.3.3 Setting Up DataReaderListeners ............................................................................7-31
7.3.4 Checking DataReader Status and StatusConditions ...........................................7-34
7.3.5 Waiting for Historical Data .....................................................................................7-35
7.3.6 Statuses for DataReaders.........................................................................................7-35
7.3.7 Setting DataReader QosPolicies .............................................................................7-47
7.3.8 Navigating Relationships Among Entities ...........................................................7-53
7.4 Using DataReaders to Access Data (Read & Take)............................................................7-55
7.4.1 Using a Type-Specific DataReader (FooDataReader)..........................................7-55
7.4.2 Loaning and Returning Data and SampleInfo Sequences..................................7-55
7.4.3 Accessing Data Samples with Read or Take.........................................................7-57
7.4.4 The Sequence Data Structure ..................................................................................7-65
7.4.5 The SampleInfo Structure........................................................................................7-66
7.5 Subscriber QosPolicies ..........................................................................................................7-72
7.6 DataReader QosPolicies ........................................................................................................7-72
7.6.1 DATA_READER_PROTOCOL QosPolicy (DDS Extension)..............................7-72
7.6.2 DATA_READER_RESOURCE_LIMITS QosPolicy (DDS Extension) ...............7-78
7.6.3 READER_DATA_LIFECYCLE QoS Policy ...........................................................7-84
7.6.4 TIME_BASED_FILTER QosPolicy..........................................................................7-87
7.6.5 TRANSPORT_MULTICAST QosPolicy (DDS Extension) ..................................7-90
8 Working with Domains....................................................................8-1
8.1 Fundamentals of Domains and DomainParticipants..........................................................8-1
8.2 DomainParticipantFactory......................................................................................................8-4
8.2.1 Setting DomainParticipantFactory QosPolicies .....................................................8-7
8.2.2 Getting and Setting Default QoS for DomainParticipants....................................8-8
8.2.3 Freeing Resources Used by the DomainParticipantFactory.................................8-9
8.2.4 Looking Up a DomainParticipant ............................................................................8-9
8.2.5 Getting QoS Values from a QoS Profile...................................................................8-9
8.3 DomainParticipants ...............................................................................................................8-10
8.3.1 Creating a DomainParticipant................................................................................8-16
8.3.2 Deleting DomainParticipants..................................................................................8-18
8.3.3 Deleting Contained Entities ....................................................................................8-18
xii
8.3.4 Choosing a Domain ID and Creating Multiple Domains .................................. 8-19
8.3.5 Setting Up DomainParticipantListeners............................................................... 8-20
8.3.6 Setting DomainParticipant QosPolicies................................................................ 8-22
8.3.7 Looking up Topic Descriptions.............................................................................. 8-29
8.3.8 Finding a Topic......................................................................................................... 8-30
8.3.9 Getting the Implicit Publisher or Subscriber ....................................................... 8-30
8.3.10 Asserting Liveliness................................................................................................. 8-32
8.3.11 Learning about Discovered DomainParticipants................................................ 8-32
8.3.12 Learning about Discovered Topics ........................................................................ 8-33
8.3.13 Other DomainParticipant Operations................................................................... 8-33
8.4 DomainParticipantFactory QosPolicies ............................................................................. 8-34
8.4.1 PROFILE QosPolicy (DDS Extension) ................................................................. 8-34
8.4.2 SYSTEM_RESOURCE_LIMITS QoS Policy (DDS Extension) ........................... 8-36
8.5 DomainParticipant QosPolicies........................................................................................... 8-38
8.5.1 DATABASE QosPolicy (DDS Extension).............................................................. 8-38
8.5.2 DISCOVERY QosPolicy (DDS Extension)............................................................ 8-42
8.5.3 DISCOVERY_CONFIG QosPolicy (DDS Extension).......................................... 8-47
8.5.4 DOMAIN_PARTICIPANT_RESOURCE_LIMITS QosPolicy
(DDS Extension)....................................................................................................... 8-54
8.5.5 ENTITYNAME QosPolicy (DDS Extension)........................................................ 8-60
8.5.6 EVENT QosPolicy (DDS Extension) ..................................................................... 8-61
8.5.7 RECEIVER_POOL QosPolicy (DDS Extension) .................................................. 8-64
8.5.8 TRANSPORT_BUILTIN QosPolicy (DDS Extension)......................................... 8-66
8.5.9 WIRE_PROTOCOL QosPolicy (DDS Extension) ................................................ 8-67
8.6 Clock Selection....................................................................................................................... 8-75
8.6.1 Available Clocks....................................................................................................... 8-75
8.6.2 Clock Selection Strategy.......................................................................................... 8-76
9 Building Applications......................................................................9-1
9.1 Running on a Computer Not Connected to a Network .................................................... 9-2
9.2 RTI Data Distribution Service Header Files — All Architectures .................................... 9-2
9.3 UNIX-based Platforms............................................................................................................ 9-3
9.3.1 Required Libraries ..................................................................................................... 9-4
9.3.2 Compiler Flags ........................................................................................................... 9-4
9.4 Windows Platforms................................................................................................................. 9-5
9.4.1 Using Microsoft Visual C++ 6.0............................................................................... 9-5
xiii
9.4.2 Using Visual Studio .NET, Visual Studio .NET 2003, or Visual Studio 2005......9-7
9.5 Java Platforms...........................................................................................................................9-8
9.5.1 Java Libraries...............................................................................................................9-8
9.5.2 Native Libraries ..........................................................................................................9-8
Part 3: Advanced Concepts
10 Reliable Communications........................................................... 10-1
10.1 Sending Data Reliably ...........................................................................................................10-1
10.1.1 Best-effort Delivery Model......................................................................................10-2
10.1.2 Reliable Delivery Model ..........................................................................................10-2
10.2 Overview of the Reliable Protocol .......................................................................................10-4
10.3 Using QosPolicies to Tune the Reliable Protocol...............................................................10-9
10.3.1 Enabling Reliability ................................................................................................10-10
10.3.2 Tuning Queue Sizes and Other Resource Limits ...............................................10-11
10.3.3 Controlling Queue Depth with the History QosPolicy.....................................10-18
10.3.4 Controlling Heartbeats and Retries with the DataWriterProtocol
QosPolicy .................................................................................................................10-18
10.3.5 Avoiding Message Storms with DataReaderProtocol QosPolicy ....................10-27
10.3.6 Resending Samples to Late-Joiners with the Durability QosPolicy................10-27
10.3.7 Use Cases .................................................................................................................10-28
11 Mechanisms for Achieving Information Durability and
Persistence11-1
11.1 Introduction ............................................................................................................................11-1
11.1.1 Scenario 1. A DataReader Joins after a DataWriter Restarts
(Durable Writer History) .........................................................................................11-3
11.1.2 Scenario 2: A DataReader Restarts While DataWriter Stays Up
(Durable Reader State).............................................................................................11-4
11.1.3 Scenario 3. A DataReader Joins after the DataWriter Leaves the Domain
(Durable Data)...........................................................................................................11-4
11.2 Durability and Persistence Based on Virtual GUIDs ........................................................11-6
11.3 Durable Writer History..........................................................................................................11-7
11.3.1 Durable Writer History Use Case...........................................................................11-8
xiv
11.3.2 How To Configure Durable Writer History ..........................................................11-9
11.4 Durable Reader State ...........................................................................................................11-13
11.4.1 Durable Reader State Use Case.............................................................................11-15
11.4.2 How To Configure a DataReader for Durable Reader State.............................11-16
11.5 Data Durability .....................................................................................................................11-18
11.5.1 RTI Persistence Service...........................................................................................11-18
12 Discovery .........................................................................................12-1
12.1 What is Discovery?................................................................................................................ 12-2
12.1.1 Simple Participant Discovery................................................................................. 12-2
12.1.2 Simple Endpoint Discovery.................................................................................... 12-3
12.2 Configuring the Peers List Used in Discovery.................................................................. 12-4
12.2.1 Peer Descriptor Format........................................................................................... 12-6
12.2.2 NDDS_DISCOVERY_PEERS Environment Variable Format............................ 12-8
12.2.3 NDDS_DISCOVERY_PEERS File Format ............................................................ 12-9
12.3 Discovery Implementation................................................................................................. 12-10
12.3.1 Participant Discovery.............................................................................................12-11
12.3.2 Endpoint Discovery............................................................................................... 12-20
12.3.3 Discovery Traffic Summary .............................................................................. 12-26
12.3.4 Discovery-Related QoS ......................................................................................... 12-27
12.4 Debugging Discovery ......................................................................................................... 12-28
12.5 Ports Used for Discovery ................................................................................................... 12-31
12.5.1 Inbound Ports for Meta-Traffic ............................................................................ 12-32
12.5.2 Inbound Ports for User Traffic ............................................................................. 12-33
12.5.3 Automatic Selection of participant_id and Port Reservation.......................... 12-33
12.5.4 Tuning domain_id_gain and participant_id_gain ............................................ 12-34
13 Transport Plugins ............................................................................13-1
13.1 Builtin Transport Plugins ..................................................................................................... 13-2
13.2 Extension Transport Plugins................................................................................................ 13-3
13.3 The NDDSTransportSupport Class..................................................................................... 13-4
13.4 Explicitly Creating Builtin Transport Plugin Instances ................................................... 13-4
13.5 Setting Builtin Transport Properties of the Default Transport Instance—
get/set_builtin_transport_properties() .............................................................................. 13-5
13.6 Setting Builtin Transport Properties with the PropertyQosPolicy ................................. 13-7
xv
13.6.1 Notes Regarding Loopback and Shared Memory..............................................13-25
13.6.2 Setting the Maximum Gather-Send Buffer Count for UDPv4 and UDPv6....13-25
13.7 Installing Additional Builtin Transport Plugins with register_transport()..................13-26
13.7.1 Transport Lifecycles................................................................................................13-27
13.7.2 Transport Aliases ....................................................................................................13-28
13.7.3 Transport Network Addresses..............................................................................13-29
13.8 Installing Additional Builtin Transport Plugins with PropertyQosPolicy .................13-29
13.9 Other Transport Support Operations ...............................................................................13-31
13.9.1 Adding a Send Route .............................................................................................13-31
13.9.2 Adding a Receive Route ........................................................................................13-32
13.9.3 Looking Up a Transport Plugin............................................................................13-33
14 Built-In Topics .................................................................................. 14-1
14.1 Listeners for Built-in Entities................................................................................................14-2
14.2 Built-in DataReaders..............................................................................................................14-2
14.2.1 LOCATOR_FILTER QoS Policy (DDS Extension)..............................................14-11
14.3 Accessing the Built-in Subscriber ......................................................................................14-12
14.4 Restricting Communication—Ignoring Entities ..............................................................14-13
14.4.1 Ignoring Specific Remote DomainParticipants ..................................................14-14
14.4.2 Ignoring Publications and Subscriptions ............................................................14-14
14.4.3 Ignoring Topics .......................................................................................................14-16
15 Configuring QoS with XML...........................................................15-1
15.1 Example XML File..................................................................................................................15-2
15.2 How to Load XML-Specified QoS Settings ........................................................................15-3
15.2.1 Loading, Reloading and Unloading Profiles ........................................................15-4
15.3 How to Use XML-Specified QoS Settings...........................................................................15-5
15.4 XML File Syntax .....................................................................................................................15-8
15.5 XML String Syntax .................................................................................................................15-9
15.6 How the XML is Validated..................................................................................................15-10
15.6.1 Validation at Run-Time..........................................................................................15-10
15.6.2 XML File Validation During Editing....................................................................15-11
15.7 Configuring QoS with XML ...............................................................................................15-12
15.7.1 QosPolicies...............................................................................................................15-13
xvi
15.7.2 Sequences................................................................................................................ 15-13
15.7.3 Arrays ...................................................................................................................... 15-16
15.7.4 Enumeration Values .............................................................................................. 15-16
15.7.5 Time Values (Durations) ....................................................................................... 15-17
15.7.6 Transport Properties .............................................................................................. 15-17
15.7.7 Thread Settings....................................................................................................... 15-18
15.8 QoS Profiles.......................................................................................................................... 15-18
15.8.1 QoS Profiles with a Single QoS ............................................................................ 15-20
15.8.2 QoS-Profile Inheritance......................................................................................... 15-20
15.8.3 Topic Filters............................................................................................................. 15-23
15.8.4 Overwriting Default QoS Values ......................................................................... 15-27
15.8.5 Get Qos Profiles...................................................................................................... 15-28
15.9 QoS Libraries........................................................................................................................ 15-28
15.9.1 Get Qos Profile Libraries....................................................................................... 15-30
15.10URL Groups......................................................................................................................... 15-30
16 Multi-channel DataWriters...........................................................16-1
16.1 What is a Multi-channel DataWriter?................................................................................. 16-3
16.2 How to Configure a Multi-channel DataWriter ................................................................ 16-5
16.2.1 Limitations ................................................................................................................ 16-5
16.3 Multi-channel Configuration on the Reader Side............................................................. 16-7
16.4 Where Does the Filtering Occur? ........................................................................................ 16-9
16.4.1 Filtering at the DataWriter...................................................................................... 16-9
16.4.2 Filtering at the DataReader .................................................................................. 16-10
16.4.3 Filtering on the Network Hardware ................................................................... 16-10
16.5 Fault Tolerance and Redundancy ......................................................................................16-11
16.6 Reliability with Multi-Channel DataWriters ................................................................... 16-12
16.6.1 Reliable Delivery.................................................................................................... 16-12
16.6.2 Reliable Protocol Considerations......................................................................... 16-12
16.7 Performance Considerations ............................................................................................. 16-13
16.7.1 Network-Switch Filtering ..................................................................................... 16-13
16.7.2 DataWriter and DataReader Filtering................................................................. 16-14
17 RTI Data Distribution Service Threading Model .....................17-1
17.1 Database Thread.................................................................................................................... 17-2
xvii
17.2 Event Thread...........................................................................................................................17-3
17.3 Receive Threads......................................................................................................................17-4
17.4 Exclusive Areas, RTI Data Distribution Service Threads and User Listeners...............17-6
17.5 Controlling CPU Core Affinity for RTI Threads................................................................17-7
18 Troubleshooting.............................................................................. 18-1
18.1 What Version am I Running?................................................................................................18-1
18.1.1 Finding Version Information in Revision Files.....................................................18-1
18.1.2 Finding Version Information Programmatically..................................................18-2
18.2 Controlling Messages from RTI Data Distribution Service..............................................18-3
18.2.1 Format of Logged Messages ...................................................................................18-6
Part 4: RTI Secure WAN Transport
19 RTI Secure WAN Transport............................................................ 19-1
19.1 WAN Traversal via UDP Hole-punching ...........................................................................19-3
19.1.1 Protocol Details .........................................................................................................19-4
19.2 WAN Locators ........................................................................................................................19-9
19.3 Datagram Transport-Layer Security (DTLS)....................................................................19-10
19.3.1 Security Model ........................................................................................................19-10
19.3.2 Liveliness Mechanism............................................................................................19-11
19.4 Certificate Support...............................................................................................................19-11
19.5 License Issues........................................................................................................................19-12
20 Configuring RTI Secure WAN Transport ....................................20-1
20.1 Example Applications ...........................................................................................................20-1
20.2 Setting Up a Transport with the Property QoS..................................................................20-2
20.3 WAN Transport Properties ...................................................................................................20-4
20.4 Secure Transport Properties................................................................................................20-13
20.5 Explicitly Instantiating a WAN or Secure Transport Plugin..........................................20-17
20.5.1 Additional Header Files and Include Directories..............................................20-18
20.5.2 Additional Libraries ...............................................................................................20-18
xviii
20.5.3 Compiler Flags ....................................................................................................... 20-18
Part 5: RTI Persistence Service
21 Introduction to RTI Persistence Service ...................................21-1
22 Configuring RTI Persistence Service .........................................22-1
22.1 How to Load the XML Configuration................................................................................ 22-2
22.2 XML Configuration File ....................................................................................................... 22-3
22.2.1 Configuration File Syntax....................................................................................... 22-4
22.2.2 XML Validation ........................................................................................................ 22-5
22.3 QoS Configuration ................................................................................................................ 22-7
22.4 Configuring the RTI Persistence Service Application...................................................... 22-8
22.5 Configuring the Persistent Storage................................................................................... 22-10
22.6 Configuring Participants.................................................................................................... 22-12
22.7 Creating Persistence Groups.............................................................................................. 22-13
22.7.1 QoSs ......................................................................................................................... 22-17
22.7.2 Durability Service Qos Policy .............................................................................. 22-17
22.7.3 Sharing a Publisher/Subscriber........................................................................... 22-18
22.7.4 Sharing a Database Connection ........................................................................... 22-18
23 Running RTI Persistence Service ................................................23-1
23.1 Starting RTI Persistence Service .......................................................................................... 23-1
23.2 Stopping RTI Persistence Service........................................................................................ 23-2
Part 6: RTI CORBA Compatibility Kit
24 Introduction to RTI CORBA Compatibility Kit ..........................24-1
25 Generating CORBA-Compatible Code with rtiddsgen ......25-1
25.1 Generating C++ Code........................................................................................................... 25-2
25.2 Generating Java Code ........................................................................................................... 25-3
xix
26 Supported IDL Types ..................................................................... 26-1
Part 7: RTI RTSJ Extension Kit
27 Introduction to RTI RTSJ Extension Kit ....................................... 27-1
28 Using RTI RTSJ Extension Kit ......................................................... 28-1
Part 8: RTI TCP Transport
29 Configuring the RTI TCP Transport .............................................29-1
29.1 TCP Communication Scenarios ...........................................................................................29-1
29.1.1 Communication Within a Single LAN...................................................................29-1
29.1.2 Symmetric Communication Across NATs ............................................................29-2
29.1.3 Asymmetric Communication Across NATs..........................................................29-4
29.2 Configuring the RTI TCP Transport ....................................................................................29-6
29.2.1 Choosing a Transport Mode....................................................................................29-6
29.2.2 Explicitly Instantiating the TCP Transport Plugin...............................................29-7
29.2.3 Configuring the RTI TCP Transport with the Property QosPolicy ...................29-9
29.2.4 Setting the Initial Peers ..........................................................................................29-11
29.2.5 TCP/TLS Transport Properties.............................................................................29-11
xx

xxi
Welcome to RTI Data Distribution Service
Welcome to RTI Data Distribution Service—the real-time network middleware from Real-
Time Innovations, Inc (RTI). RTI Data Distribution Service provides an easy way to build
applications that communicate over a network. With RTI Data Distribution Service, appli-
cations can transfer information between different architectures and operating systems
without any changes to the application code. RTI Data Distribution Service is designed
for real-time applications that need control over timing and memory usage, have low
latency requirements, or need high robustness to network changes or failures. RTI Data
Distribution Service consists of a library that is linked to your applications.
Conventions
The terminology and example code in this manual assume you are using C++ without
namespace support.
C, C++/CLI, C#, and Java APIs are also available; they are fully described in the online
(HTML) documentation.
Namespace support in C++, C++/CLI, and C# is also available; see the online documen-
tation (from the Modules page, select Using DDS:: Namespace) for details.
Extensions to the DDS Standard
RTI Data Distribution Service implements the DDS Standard published by the OMG. It
also includes features that are extensions to DDS. These include additional Quality of
Service parameters, function calls, structure fields, etc.
Extensions also include product-specific APIs that complement the DDS API. These
include APIs to create and use transport plug-ins, and APIs to control the verbosity and

xxii
logging capabilities. These APIs are prefixed with RTI Data Distribution Service, such as
NDDSTransportSupport::register_transport().
Environment Variables
RTI Data Distribution Service documentation refers to pathnames that have been custom-
ized during installation. NDDSHOME refers to the installation directory of RTI Data
Distribution Service.
Names of Supported Platforms
RTI Data Distribution Service runs on several different target platforms. To support this
vast array of platforms, RTI Data Distribution Service separates the executable, library,
and object files for each platform into individual directories.
Each platform name has four parts: hardware architecture, operating system, operating
system version and compiler. For example, i86Linux2.4gcc3.2 is the directory that con-
tains files specific to Linux
®
version 2.4 for the Intel processor, compiled with gcc ver-
sion 3.2.
For a full list of supported platforms, see the Platform Notes.
Additional Resources
The details of each API (such as function parameters, return values, etc.) and examples
are in the online documentation. In case of discrepancies between the information in
this document and the online documentation, the latter should be considered more up-
to-date.

1-1
1. Overview
Chapter 1 Overview
RTI Data Distribution Service is network middleware for distributed real-time applica-
tions. RTI Data Distribution Service simplifies application development, deployment and
maintenance and provides fast, predictable distribution of time-critical data over a vari-
ety of transport networks.
With RTI Data Distribution Service middleware, you can:
❏ Perform complex one-to-many and many-to-many network communications;
the application uses an OMG standard API, DDS, to publish and subscribe to the
data.
❏ Customize application operation to meet various real-time, reliability, and qual-
ity-of-service goals.
❏ Provide application-transparent fault tolerance and application robustness.
❏ Use a variety of transports.
This chapter introduces basic concepts of middleware and common communication
models, and describes how RTI Data Distribution Service’s feature-set addresses the
needs of real-time systems.
1.1 What is RTI Data Distribution Service?
RTI Data Distribution Service is network middleware for real-time distributed applica-
tions. It provides the communications service programmers need to distribute time-crit-
ical data between embedded and/or enterprise devices or nodes. RTI Data Distribution
Service uses the publish-subscribe communications model to make data distribution effi-
cient and robust.

Chapter 1
1-2
RTI Data Distribution Service implements the Data-Centric Publish-Subscribe (DCPS)
API within the OMG’s Data Distribution Service (DDS) for Real-Time Systems. DDS is
the first standard developed for the needs of real-time systems. DCPS provides an effi-
cient way to transfer data in a distributed system.
With RTI Data Distribution Service, systems designers and programmers start with a
fault-tolerant and flexible communications infrastructure that will work over a wide
variety of computer hardware, operating systems, languages, and networking transport
protocols. RTI Data Distribution Service is highly configurable so programmers can adapt
it to meet the application’s specific communication requirements.
1.2 What is Middleware?
Middleware is a software layer between an application and the operating system. Net-
work middleware isolates the application from the details of the underlying computer
architecture, operating system and network stack (see Figure 1.1). Network middleware
simplifies the development of distributed systems by allowing applications to send and
receive information without having to program using lower-level protocols such as
sockets and TCP or UDP/IP.
Publish-subscribe middleware RTI Data Distribution Service is based on a publish-sub-
scribe communications model. Publish-subscribe (PS) middleware provides a simple
and intuitive way to distribute data. It decouples the software that creates and sends
Figure 1.1 Network Middleware
RTI Data Distribution Service is middleware that insulates applications from the raw operating-
system network stack.

1.3 Network Communications Models
1-3
1. Overview
data—the data publishers—from the software that receives and uses the data—the data
subscribers. Publishers simply declare their intent to send and then publish the data.
Subscribers declare their intent to receive, then the data is automatically delivered by
the middleware.
Despite the simplicity of the model, PS middleware can handle complex patterns of
information flow. The use of PS middleware results in simpler, more modular distrib-
uted applications. Perhaps most importantly, PS middleware can automatically handle
all network chores, including connections, failures, and network changes, eliminating
the need for user applications to program of all those special cases. What experienced
network middleware developers know is that handling special cases accounts for over
80% of the effort and code.
1.3 Network Communications Models
The communications model underlying the network middleware is the most important
factor in how applications communicate. The communications model impacts the per-
formance, the ease to accomplish different communication transactions, the nature of
detecting errors, and the robustness to different error conditions. Unfortunately, there is
no “one size fits all” approach to distributed applications. Different communications
models are better suited to handle different classes of application domains.
This section describes three main types of network communications models:
❏ Point-to-point
❏ Client-server
❏ Publish-subscribe
Point-to-point model Point-to-point is the simplest form of communication, as illus-
trated in Figure 1.2. The telephone is an example of an everyday point-to-point commu-
nications device. To use a telephone, you must know the address (phone number) of the
other party. Once a connection is established, you can have a reasonably high-band-
width conversation. However, the telephone does not work as well if you have to talk to
many people at the same time. The telephone is essentially one-to-one communication.
TCP is a point-to-point network protocol designed in the 1970s. While it provides reli-
able, high-bandwidth communication, TCP is cumbersome for systems with many com-
municating nodes.

Chapter 1
1-4
Client-server model To address the scalability issues of the Point-to-Point model,
developers turned to the Client-Server model. Client-server networks designate one
special server node that connects simultaneously to many client nodes, as illustrated in
Figure 1.3. Client-server is a "many-to-one" architecture. Ordering pizza over the phone
is an example of client-server communication. Clients must know the phone number of
the pizza parlor to place an order. The parlor can handle many orders without knowing
ahead of time where people (clients) are located. After the order (request), the parlor
asks the client where the response (pizza) should be sent. In the client-server model,
each response is tied to a prior request. As a result, the response can be tailored to each
request. In other words, each client makes a request (order) and each reply (pizza) is
made for one specific client in mind.
The client-server network architecture works best when information is centralized, such
as in databases, transaction processing systems, and file servers. However, if informa-
tion is being generated at multiple nodes, a client-server architecture requires that all
information are sent to the server for later redistribution to the clients. This approach is
inefficient and precludes deterministic communications, since the client does not know
when new information is available. The time between when the information is available
on the server, and when the client asks and receives it adds a variable latency to the sys-
tem.
Publish-subscribe model In the publish-subscribe communications model, computer
applications (nodes) “subscribe” to data they need and “publish” data they want to
share. Messages pass directly between the publisher and the subscribers, rather than
A
B
Point-to-point is one-to-one communications.
Figure 1.2 Point-to-Point
Client
Client-server is many-to-one communications.
Server
Client
Client
Client
request
Figure 1.3 Client-Server
reply

1.4 Features of RTI Data Distribution Service
1-5
1. Overview
moving into and out of a centralized server. Most time-sensitive information intended
to reach many people is sent by a publish-subscribe system. Examples of publish-sub-
scribe systems in everyday life include television, magazines, and newspapers.
Publish-subscribe communication architectures are good for distributing large quanti-
ties of time-sensitive information efficiently, even in the presence of unreliable delivery
mechanisms. This direct and simultaneous communication among a variety of nodes
makes publish-subscribe network architecture the best choice for systems with complex
time-critical data flows.
While the publish-subscribe model provides system architects with many advantages, it
may not be the best choice for all types of communications, including:
❏ File-based transfers (alternate solution: FTP)
❏ Remote Method Invocation (alternate solutions: CORBA, COM, SOAP)
❏ Connection-based architectures (alternate solution: TCP/IP)
❏ Synchronous transfers (alternate solution: CORBA)
1.4 Features of RTI Data Distribution Service
RTI Data Distribution Service supports mechanisms that go beyond the basic publish-
subscribe model. The key benefit is that applications that use RTI Data Distribution Ser-
vice for their communications are entirely decoupled. Very little of their design time has
to be spent on how to handle their mutual interactions. In particular, the applications
never need information about the other participating applications, including their exis-
Publish-subscribe is many-to-many communications.
Figure 1.4 Publish-Subscribe
Subscriber
Publisher
Publisher
Subscriber
Subscriber

Chapter 1
1-6
tence or locations. RTI Data Distribution Service automatically handles all aspects of mes-
sage delivery, without requiring any intervention from the user applications, including:
❏ determining who should receive the messages,
❏ where recipients are located,
❏ what happens if messages cannot be delivered.
This is made possible by how RTI Data Distribution Service allows the user to specify
Quality of Service (QoS) parameters as a way to configure automatic-discovery mecha-
nisms and specify the behavior used when sending and receiving messages. The mecha-
nisms are configured up-front and require no further effort on the user's part. By
exchanging messages in a completely anonymous manner, RTI Data Distribution Service
greatly simplifies distributed application design and encourages modular, well-struc-
tured programs.
Furthermore, RTI Data Distribution Service includes the following features, which are
designed to meet the needs of distributed real-time applications:
❏ Data-centric publish-subscribe communications Simplifies distributed applica-
tion programming and provides time-critical data flow with minimal latency.
• Clear semantics for managing multiple sources of the same data.
• Efficient data transfer, customizable Quality of Service, and error notifica-
tion.
• Guaranteed periodic samples, with maximum rate set by subscriptions.
• Notification by a callback routine on data arrival to minimize latency.
• Notification when data does not arrive by an expected deadline.
• Ability to send the same message to multiple computers efficiently.
❏ User-definable data types Enables you to tailor the format of the information
being sent to each application.
❏ Reliable messaging Enables subscribing applications to specify reliable deliv-
ery of samples.
❏ Multiple Communication Networks Multiple independent communication net-
works (domains) each using RTI Data Distribution Service can be used over the
same physical network. Applications are only able to participate in the domains
to which they belong. Individual applications can be configured to participate in
multiple domains.

1.4 Features of RTI Data Distribution Service
1-7
1. Overview
❏ Symmetric architecture Makes your application robust:
• No central server or privileged nodes, so the system is robust to node fail-
ures.
• Subscriptions and publications can be dynamically added and removed
from the system at any time.
❏ Pluggable Transports Framework Includes the ability to define new transport
plug-ins and run over them. RTI Data Distribution Service comes with a standard
UDP/IP pluggable transport and a shared memory transport. It can be config-
ured to operate over a variety of transport mechanisms, including backplanes,
switched fabrics, and new networking technologies.
❏ Multiple Built-in Transports Includes UDP/IP and shared memory transports.
❏ Multi-language support Includes APIs for the C, C++, C++/CLI, C#, and Java™
programming languages.
❏ Multi-platform support Includes support for flavors of UNIX
®
(Linux
®
and
Solaris™), real-time operating systems (INTEGRITY
®
, VxWorks
®
, QNX
®
, and
LynxOS
®
), and Windows
®
(2000, 2003, CE, Vista, and XP). (Consult the Platform
Notes to see which platforms are supported in this release.)
❏ Compliance with Standards
• API complies with the DCPS layer of the OMG’s DDS specification.
• Data types comply with OMG Interface Definition Language™ (IDL).
• Data packet format complies with the International Engineering Consor-
tium’s (IEC’s) publicly available specification for the RTPS wire protocol.

Chapter 1
1-8
2-1
2. DCPS
Chapter 2 Data-Centric Publish-Subscribe
Communications
This chapter describes the formal communications model used by RTI Data Distribution
Service, the Data-Centric Publish-Subscribe (DCPS) standard. DCPS is a formalization
(through a standardized API) and extension of the publish-subscribe communications
model presented in Section 1.3.
This chapter includes the following sections:
❏ What is DCPS? (Section 2.1)
❏ Data Types, Topics, Keys, Instances, and Samples (Section 2.2)
❏ DataWriters/Publishers and DataReaders/Subscribers (Section 2.3)
❏ Domains and DomainParticipants (Section 2.4)
❏ Quality of Service (QoS) (Section 2.5)
❏ Application Discovery (Section 2.6)
2.1 What is DCPS?
DCPS is the portion of the OMG DDS (Data Distribution Service) Standard that
addresses data-centric publish-subscribe communications. The DDS standard defines a
language-independent model of publish-subscribe communications that has standard-
ized mappings into various implementation languages. RTI Data Distribution Service
offers C, C++, C++/CLI, C#, and Java versions of the DCPS API.

Chapter 2
2-2
The publish-subscribe approach to distributed communications is a generic mechanism
that can be employed by many different types of applications. The DCPS model
described in this chapter extends the publish-subscribe model to address the specific
needs of real-time, data-critical applications. As you’ll see, it provides several mecha-
nisms that allow application developers to control how communications works and
how the middleware handles resource limitations and error conditions.
The “data-centric” portion of the term DCPS describes the fundamental concept sup-
ported by the design of the API. In data-centric communications, the focus is on the dis-
tribution of data between communicating applications. A data-centric system is
comprised of data publishers and data subscribers. The communications are based on
passing data of known types in named streams from publishers to subscribers.
In contrast, in object-centric communications the fundamental concept is the interface
between the applications. An interface is comprised of a set of methods of known types
(number and types of method arguments). An object-centric system is comprised of
interface servers and interface clients, and communications are based on clients invok-
ing methods on named interfaces that are serviced by the corresponding server.
Data and object-centric communications are complementary paradigms in a distributed
system. Applications may require both. However, real-time communications often fit a
data-centric model more naturally.
2.1.1 DCPS for Real-Time Requirements
DCPS, and specifically the RTI Data Distribution Service implementation, is well suited
for real-time applications. For instance, real-time applications often require the follow-
ing features:
Efficiency Real-time systems require efficient data collection and delivery. Only mini-
mal delays should be introduced into the critical data-transfer path. Publish-sub-
scribe is more efficient than client-server in both latency and bandwidth for
periodic data exchange.
Publish-subscribe greatly reduces the overhead required to send data over the
network compared to a client-server architecture. Occasional subscription
requests, at low bandwidth, replace numerous high-bandwidth client requests.
Latency is also reduced, since the outgoing request message time is eliminated. As
soon as a new publication data sample becomes available, it is sent to the corre-
sponding subscriptions.
Determinism Real-time applications often care about the determinism of delivering
periodic data as well as the latency of delivering event data. Once buffers are
introduced into a data stream to support reliable connections, new data may be

2.1 What is DCPS?
2-3
2. DCPS
held undelivered for a unpredictable amount of time while waiting for confirma-
tion that old data was received.
Since publish-subscribe does not inherently require reliable connections, imple-
mentations, like RTI Data Distribution Service, can provide configurable trade-offs
between the deterministic delivery of new data and the reliable delivery of all
data.
Flexible delivery bandwidth Typical real-time systems include both real-time and non-
real-time nodes. The bandwidth requirements for these nodes—even for the same
data—are quite different. For example, an application may be sending data sam-
ples faster than a non-real-time application is capable of handling. However, a
real-time application may want the same data as fast as it is produced.
DCPS allows subscribers to the same data to set individual limits on how fast data
should be delivered each subscriber. This is similar to how some people get a
newspaper every day while others can subscribe to only the Sunday paper.
Thread awareness Real-time communications must work without slowing the thread
that sends data samples. On the receiving side, some data streams should have
higher priority so that new data for those streams are processed before lower pri-
ority streams.
RTI Data Distribution Service provides user-level configuration of its internal
threads that process incoming data. Users may configure RTI Data Distribution
Service so that different threads are created with different priorities to process
received data of different data streams.
Fault-tolerant operation Real-time applications are often in control of systems that are
required to run in the presence of component failures. Often, those systems are
safety critical or carry financial penalties for loss of service. The applications run-
ning those systems are usually designed to be fault-tolerant using redundant
hardware and software. Backup applications are often “hot” and interconnected
to primary systems so that they can take over as soon as a failure is detected.
Publish-subscribe is capable of supporting many-to-many connectivity with
redundant DataWriters and DataReaders. This feature is ideal for constructing
fault-tolerant or high-availability applications with redundant nodes and robust
fault detection and handling services.
DCPS, and thus RTI Data Distribution Service, was designed and implemented specifi-
cally to address the requirements above through configuration parameters known as
QosPolicies defined by the DCPS standard (see QosPolicies (Section 4.2)). The following
section introduces basic DCPS terminology and concepts.

Chapter 2
2-4
2.2 Data Types, Topics, Keys, Instances, and Samples
In data-centric communications, the applications participating in the communication
need to share a common view of the types of data being passed around.
Within different programming languages there are several ‘primitive’ data types that all
users of that language naturally share (integers, floating point numbers, characters,
booleans, etc.). However, in any non-trivial software system, specialized data types are
constructed out of the language primitives. So the data to be shared between applica-
tions in the communication system could be structurally simple, using the primitive lan-
guage types mentioned above, or it could be more complicated, using, for example, C
and C++ structs, like this:
struct Time {
long year;
short day;
short hour;
short minute;
short second;
};
struct StockPrice {
float price;
Time timeStamp;
};
Within a set of applications using DCPS, the different applications do not automatically
know the structure of the data being sent, nor do they necessarily interpret it in the same
way (if, for instance, they use different operating systems, were written with different
languages, or were compiled with different compilers). There must be a way to share
not only the data, but also information about how the data is structured.
In DCPS, data definitions are shared among applications using OMG IDL, a language-
independent means of describing data. For more information on data types and IDL, see
Chapter 3.
2.2.1 Data Topics — What is the Data Called?
Shared knowledge of the data types is a requirement for different applications to com-
municate with DCPS. The applications must also share a way to identify which data is
to be shared. Data (of any data type) is uniquely distinguished by using a name called a

2.2 Data Types, Topics, Keys, Instances, and Samples
2-5
2. DCPS
Topic. By definition, a Topic corresponds to a single data type. However, several Topics
may refer to the same data type.
Topics interconnect DataWriters and DataReaders. A DataWriter is an object in an applica-
tion that tells RTI Data Distribution Service (and indirectly, other applications) that it has
some values of a certain Top ic. A corresponding DataReader is an object in an application
that tells RTI Data Distribution Service that it wants to receive values for the same Topic.
And the data that is passed from the DataWriter to the DataReader is of the data type
associated with the Topic. DataWriters and DataReaders are described more in
Section 2.3.
For a concrete example, consider a system that distributes stock quotes between applica-
tions. The applications could use a data type called StockPrice. There could be multiple
Topics of the StockPrice data type, one for each company’s stock, such as IBM, MSFT,
GE, etc. Each To pi c uses the same data type.
Data Type: StockPrice
struct StockPrice {
float price;
Time timeStamp;
};
Topic: “IBM”
Topic: “MSFT”
Topic: “GE”
Now, an application that keeps track of the current value of a client’s portfolio would
subscribe to all of the topics of the stocks owned by the client. As the value of each stock
changes, the new price for the corresponding topic is published and sent to the applica-
tion.
2.2.2 Samples, Instances, and Keys
The value of data associated with a Topic can change over time. The different values of
the Topic passed between applications are called samples. In our stock-price example,
samples show the price of a stock at a certain point in time. So each sample may show a
different price.
For a data type, you can select one or more fields within the data type to form a key. A
key is something that can be used to uniquely identify one instance of a Topic from
another instance of the same To pi c. Think of a key as a way to sub-categorize or group
related data values for the same Top ic . Note that not all data types are defined to have

Chapter 2
2-6
keys, and thus, not all topics have keys. For topics without keys, there is only a single
instance of that topic.
However, for topics with keys, a unique value for the key identifies a unique instance of
the topic. Samples are then updates to particular instances of a topic. Applications can
subscribe to a topic and receive samples for many different instances. Applications can
publish samples of one, all, or any number of instances of a topic. Many quality of ser-
vice parameters actually apply on a per instance basis. Keys are also useful for subscrib-
ing to a group of related data streams (instances) without pre-knowledge of which data
streams (instances) exist at runtime.
For example, let’s change the StockPrice data type to include the symbol of the stock.
Then instead of having a Top ic for every stock, which would result in hundreds or thou-
sands of topics and related DataWriters and DataReaders, each application would only
have to publish or subscribe to a single Topic, say “StockPrices.” Successive values of a
stock would be presented as successive samples of an instance of “StockPrices”, with
each instance corresponding to a single stock symbol.
Data Type: StockPrice
struct StockPrice {
float price;
Time timeStamp;
char *symbol; //@key
};
Instance 1 = (Topic: “StockPrices”) + (Key: “MSFT”)
sample a, price = $28.00
sample b, price = $27.88
Instance 2 = (Topic: “StockPrices”) + (Key: “IBM”)
sample a, price = $74.02
sample b, price = $73.50
Etc.
Just by subscribing to “StockPrices,” an application can get values for all of the stocks
through a single topic. In addition, the application does not have to subscribe explicitly
to any particular stock, so that if a new stock is added, the application will immediately
start receiving values for that stock as well.

2.3 DataWriters/Publishers and DataReaders/Subscribers
2-7
2. DCPS
To summarize, the unique values of data being passed using DCPS are called samples. A
sample is a combination of a To pi c (distinguished by a Topic name), an instance (distin-
guished by a key), and the actual user data of a certain data type. As seen in Figure 2.1 on
page 2-7, a Top ic identifies data of a single type, ranging from one single instance to a
whole collection of instances of that given topic for keyed data types. For more informa-
tion, see Chapter 3: Data Types and Data Samples and Chapter 5: Topics.
2.3 DataWriters/Publishers and DataReaders/Subscribers
In DCPS, applications must use APIs to create entities (objects) in order to establish pub-
lish-subscribe communications between each other. The entities and terminology associ-
ated with the data itself have been discussed already—Top ic s, keys, instances, samples.
This section will introduce the DCPS entities that user code must create to send and
receive the data. Note that Entity is actually a basic DCPS concept. In object-oriented
terms, Entity is the base class from which other DCPS classes—To pi c, DataWriter,
DataReader, Publisher, Subscriber, DomainParticipants—derive. For general information on
Entities, see Chapter 4: DDS Entities.
By using keys, a Topic can identify a collection of data-object instances.
Figure 2.1 Relationship of Topics, Keys, and Instances
Key = ...
Type:a_type
Key = key1
a_type:instance1
Key = key2
a_type:instance2
Key = key3
a_type:instance3
Topic:a_topic

Chapter 2
2-8
The sending side uses objects called Publishers and DataWriters. The receiving side uses
objects called Subscribers and DataReaders. Figure 2.2 illustrates the relationship of these
objects.
❏ An application uses DataWriters to send data. A DataWriter is associated with a
single Top ic . You can have multiple DataWriters and Top ic s in a single application.
In addition, you can have more than one DataWriter for a particular To pi c in a sin-
gle application.
❏ A Publisher is the DCPS object responsible for the actual sending of data. Publish-
ers own and manage DataWriters. A DataWriter can only be owned by a single
Publisher while a Publisher can own many DataWriters. Thus the same Publisher
may be sending data for many different Top ics of different data types. When user
Figure 2.2 Overview

2.3 DataWriters/Publishers and DataReaders/Subscribers
2-9
2. DCPS
code calls the write() method on a DataWriter, the data sample is passed to the
Publisher object which does the actual dissemination of data on the network. For
more information, see Chapter 6: Sending Data.
❏ The association between a DataWriter and a Publisher is often referred to as a pub-
lication although you never create a DCPS object known as a publication.
❏ An application uses DataReaders to access data received over DCPS. A
DataReader is associated with a single Top ic . You can have multiple DataReaders
and Topi cs in a single application. In addition, you can have more than one
DataReader for a particular Topic in a single application.
❏ A Subscriber is the DCPS object responsible for the actual receipt of published
data. Subscribers own and manage DataReaders. A DataReader can only be owned
by a single Subscriber while a Subscriber can own many DataReaders. Thus the
same Subscriber may receive data for many different To pi cs of different data
types. When data is sent to an application, it is first processed by a Subscriber; the
data sample is then stored in the appropriate DataReader. User code can either
register a listener to be called when new data arrives or actively poll the
DataReader for new data using its read() and take() methods. For more informa-
tion, see Chapter 7: Receiving Data.
❏ The association between a DataReader and a Subscriber is often referred to as a
subscription although you never create a DCPS object known as a subscription.
Example: The publish-subscribe communications model is analogous to that of maga-
zine publications and subscriptions. Think of a publication as a weekly periodical such
as Newsweek®. The Topic is the name of the periodical (in this case the string "News-
week"). The type specifies the format of the information, e.g., a printed magazine. The
user data is the contents (text and graphics) of each sample (weekly issue). The middle-
ware is the distribution service (usually the US Postal service) that delivers the maga-
zine from where it is created (a printing house) to the individual subscribers (people’s
homes). This analogy is illustrated in Figure 2.3. Note that by subscribing to a publica-
tion, subscribers are requesting current and future samples of that publication (such as
once a week in the case of Newsweek), so that as new samples are published, they are
delivered without having to submit another request for data.
By default, each data sample is propagated individually, independently, and uncorre-
lated with other samples. However, an application may request that several samples be
sent as a coherent set, so that they may be interpreted as such on the receiving side.

Chapter 2
2-10
2.4 Domains and DomainParticipants
You may have several independent DCPS applications all running on the same set of
computers. You may want to isolate one (or more) of those applications so that it isn’t
affected by the others. To address this issue, DCPS has a concept called Domains.
Domains represent logical, isolated, communication networks. Multiple applications
running on the same set of hosts on different Domains are completely isolated from each
other (even if they are on the same machine). DataWriters and DataReaders belonging to
different domains will never exchange data.
Applications that want to exchange data using DCPS must belong to the same Domain.
To belong to a Domain, DCPS APIs are used to configure and create a DomainParticipant
with a specific Domain Index. Domains are differentiated by the Domain Index (an integer
value). Applications that have created DomainParticipants with the same Domain Index
belong to the same Domain. DomainParticipants own Top ic s, Publishers and Subscribers
which in turn owns DataWriters and DataReaders. Thus all DCPS Entities belong to a spe-
cific domain.
An application may belong to multiple domains simultaneously by creating multiple
DomainParticipants with different domain indices. However, Publishers/DataWriters and
Subscribers/DataReaders only belong to the domain in which they were created.
Publisher
Topic = "Newsweek"
Subscriber
The publish-subscribe model is analogous to publishing magazines. The Publisher sends samples
of a particular Topic to all Subscribers of that Topic. With Newsweek® magazine, the Topic
would be "Newsweek." The sample consists of the data (articles and pictures) sent to all
Subscribers every week. The middleware (RTI Data Distribution Service) is the distribution
channel: all of the planes, trucks, and people who distribute the weekly issues to the Subscribers.
Figure 2.3 An Example of Publish-Subscribe
Send Receive
Sample
Issue for Feb. 15
Topic = "Newsweek"
Delivery Service

2.5 Quality of Service (QoS)
2-11
2. DCPS
As mentioned before, multiple domains may be used for application isolation which is
useful when users are testing their applications using computers on the same network
or even the same computers. By assigning each user different domains, one can guaran-
tee that the data produced by one user’s application won’t accidentally be received by
another. In addition, domains may be a way to scale and construct larger systems that
are composed of multi-node subsystems. Each subsystem would use an internal domain
for intra-system communications and an external domain to connect to other subsys-
tems.
For more information, see Chapter 8: Working with Domains.
2.5 Quality of Service (QoS)
The publish-subscribe approach to distributed communications is a generic mechanism
that can be employed by many different types of systems. The DCPS model described
here extends the publish-subscribe model to address the needs of real-time, data-critical
applications. It provides standardized mechanisms, known as Quality of Service Poli-
cies, that allow application developers to configure how communications occur, to limit
resources used by the middleware, to detect system incompatibilities and setup error
handling routines.
2.5.1 Controlling Behavior with Quality of Service (QoS) Policies
QosPolicies control many aspects of how and when data is distributed between applica-
tions. The overall QoS of the DCPS system is made up of the individual QosPolicies for
each DCPS Entity. There are QosPolicies for Topics, DataWriters, Publishers, DataReaders,
Subscribers, and DomainParticipants.
On the publishing side, the QoS of each Topic, the Top ic’s DataWriter, and the
DataWriter’s Publisher all play a part in controlling how and when data samples are sent
to the middleware. Similarly, the QoS of the To pi c, the Topic’s DataReader, and the
DataReader’s Subscriber control behavior on the subscribing side.
Users will employ QosPolicies to control a variety of behaviors. For example, the
DEADLINE policy sets up expectations of how often a DataReader expects to see sam-
ples. The OWNERSHIP and OWNERSHIP_STRENGTH policy are used together to con-
figure and arbitrate whose data is passed to the DataReader when there are multiple
DataWriters for the same instance of a Topic. The HISTORY policy specifies whether a

Chapter 2
2-12
DataWriter should save old data to send to new subscriptions that join the network later.
Many other policies exist and they are presented in QosPolicies (Section 4.2).
Some QosPolicies represent “contracts” between publications and subscriptions. For
communications to take place properly, the QosPolicies set on the DataWriter side must
be compatible with corresponding policies set on the DataReader side.
For example, the RELIABILITY policy is set by the DataWriter to state whether it is con-
figured to send data reliably to DataReaders. Because it takes additional resources to
send data reliably, some DataWriters may only support a best-effort level of reliability.
This implies that for those DataWriters, RTI Data Distribution Service will not spend addi-
tional effort to make sure that the data sent is received by DataReaders or resend any lost
data. However, for certain applications, it could be imperative that their DataReaders
receive every piece of data with total reliability. Running a system where the DataWrit-
ers have not been configured to support the DataReaders could lead to erratic failures.
To address this issue, and yet keep the publications and subscriptions as decoupled as
possible, DCPS provides a way to detect and notify when QosPolicies set by DataWriters
and DataReaders are incompatible. DCPS employs a pattern known as RxO (Requested
versus Offered). The DataReader sets a “requested” value for a particular QosPolicy. The
DataWriter sets an “offered” value for that QosPolicy. When RTI Data Distribution Service
matches a DataReader to a DataWriter, QosPolicies are checked to make sure that all
requested values can be supported by the offered values.
Note that not all QosPolicies are constrained by the RxO pattern. For example, it does
not make sense to compare policies that affect only the DataWriter but not the
DataReader or vice versa.
If the DataWriter can not satisfy the requested QosPolicies of a DataReader, RTI Data Dis-
tribution Service will not connect the two entities and will notify the applications on each
side of the incompatibility if so configured.
For example, a DataReader sets its DEADLINE QoS to 4 seconds—that is, the DataReader
is requesting that it receive new data at least every 4 seconds.
In one application, the DataWriter sets its DEADLINE QoS to 2 seconds—that is, the
DataWriter is committing to sending data at least every 2 seconds. This writer can satisfy
the request of the reader, and thus, RTI Data Distribution Service will pass the data sent
from the writer to the reader.
In another application, the DataWriter sets its DEADLINE QoS to 5 seconds. It only com-
mits to sending data at 5 second intervals. This will not satisfy the request of the
DataReader. RTI Data Distribution Service will flag this incompatibility by calling user-
installed listeners in both DataWriter and
DataReader applications and not pass data
from the writer to the reader.

2.6 Application Discovery
2-13
2. DCPS
For a summary of the QosPolicies supported by RTI Data Distribution Service, see
QosPolicies (Section 4.2).
2.6 Application Discovery
The DCPS model provides anonymous, transparent, many-to-many communications.
Each time an application sends a sample of a particular Topic, the middleware distrib-
utes the sample to all the applications that want that Topic. The publishing application
does not need to specify how many applications receive the Topic, nor where those
applications are located. Similarly, subscribing applications do not specify the location
of the publications. In addition, new publications and subscriptions of the Topic can
appear at any time, and the middleware will automatically interconnect them.
So how is this all done? Ultimately, in each application for each publication, RTI Data
Distribution Service must keep a list of applications that have subscribed to the same
Topic, nodes on which they are located, and some additional QoS parameters that con-
trol how the data is sent. Also, RTI Data Distribution Service must keep a list of applica-
tions and publications for each of the To pics to which the application has subscribed.
This propagation of this information (the existence of publications and subscriptions
and associated QoS) between applications by RTI Data Distribution Service is known as
the discovery process. While the DDS (DCPS) standard does not specify how discovery
occurs, RTI Data Distribution Service uses a standard protocol RTPS for both discovery
and formatting on-the-wire packets.
When a DomainParticipant is created, RTI Data Distribution Service sends out packets on
the network to announce its existence. When an application finds out that another appli-
cation belongs to the same domain, then it will exchange information about its existing
publications and subscriptions and associated QoS with the other application. As new
DataWriters and DataReaders are created, this information is sent to known applications.
The Discovery process is entirely configurable by the user and is discussed extensively in
Chapter 12: Discovery.

Chapter 2
2-14



3-1
3. User Data Types
Chapter 3 Data Types and Data Samples
How data is stored or laid out in memory can vary from language to language, compiler
to compiler, operating system to operating system, and processor to processor. This
combination of language/compiler/operating system/processor is called a platform.
Any modern middleware must be able to take data from one specific platform (say C/
gcc.3.2.2/Solaris/Sparc) and transparently deliver it to another (for example, Java/JDK
1.6/Windows XP/Pentium). This process is commonly called serialization/deserializa-
tion, or marshalling/demarshalling.
Messaging products have typically taken one of two approaches to this problem:
1. Do nothing. Messages consist only of opaque streams of bytes. The JMS Bytes-
Message is an example of this approach.
2. Send everything, every time. Self-describing messages are at the opposite
extreme, embedding full reflective information, including data types and field
names, with each message. The JMS MapMessage and the messages in TIBCO
Rendezvous are examples of this approach.
The “do nothing” approach is lightweight on its surface but forces you, the user of the
middleware API, to consider all data encoding, alignment, and padding issues. The
“send everything” alternative results in large amounts of redundant information being
sent with every packet, impacting performance.
RTI Data Distribution Service takes an intermediate approach. Just as objects in your
application program belong to some data type, data samples sent on the same RTI Data
Distribution Service topic share a data type. This type defines the fields that exist in the
data samples and what their constituent types are. The middleware stores and propa-
gates this meta-information separately from the individual data samples, allowing it to
propagate samples efficiently while handling byte ordering and alignment issues for
you.

Chapter 3
3-2
To publish and/or subscribe to data with RTI Data Distribution Service, you will carry
out the following steps:
1. Select a type to describe your data.
You have a number of choices. You can choose one of these options, or you can
mix and match them.
• Use a built-in type provided by the middleware.
This option may be sufficient if your data typing needs are very simple. If
your data is highly structured, or you need to be able to examine fields
within that data for filtering or other purposes, this option may not be
appropriate. The built-in types are described in Built-in Data Types (Sec-
tion 3.2).
• Use the RTI code generator, rtiddsgen, to define a type at compile-time
using a language-independent description language.
Code generation offers two strong benefits not available with dynamic
type definition: (1) it allows you to share type definitions across program-
ming languages, and (2) because the structure of the type is known at com-
pile time, it provides rigorous static type safety.
The code generator accepts input in a number of formats to make it easy to
integrate RTI Data Distribution Service with your development processes
and IT infrastructure:
• OMG IDL. This format is a standard component of both the DDS
and CORBA specifications. It describes data types with a C++-like
syntax. This format is described in Creating User Data Types with
IDL (Section 3.3).
• XML schema (XSD), either independent or embedded in a WSDL
file. XSD should be the format of choice for those using RTI Data Dis-
tribution Service alongside or connected to a web-services infrastruc-
ture. This format is described in Creating User Data Types with XML
Schemas (XSD) (Section 3.5).
• XML in a DDS-specific format. This XML format is terser, and
therefore easier to read and write by hand, than an XSD file. It offers
the general benefits of XML-extensibility and ease of integration,
while fully supporting DDS-specific data types and concepts. This
format is described in Creating User Data Types with Extensible
Markup Language (XML) (Section 3.4).

3-3
3. User Data Types
• Define a type programmatically at run time.
This method may be appropriate for applications with dynamic data
description needs: applications for which types change frequently or can-
not be known ahead of time. It is described in Defining New Types (Sec-
tion 3.8.2).
2. Register your type with a logical name.
If you've chosen to use a built-in type instead of defining your own, you can
omit this step; the middleware pre-registers the built-in types for you.
This step is described in the Defining New Types (Section 3.8.2).
3. Create a Topic using the type name you previously registered.
If you've chosen to use a built-in type instead of defining your own, you will use
the API constant corresponding to that type's name.
Creating and working with Top ic s is discussed in Chapter 5: Topics.
4. Create one or more DataWriters to publish your data and one or more DataRead-
ers to subscribe to it.
The concrete types of these objects depend on the concrete data type you've
selected, in order to provide you with a measure of type safety.
Creating and working with DataWriters and DataReaders are described in
Chapter 6: Sending Data and Chapter 7: Receiving Data, respectively.
Whether publishing or subscribing to data, you will need to know how to create and
delete data samples and how to get and set their fields. These tasks are described in
Working with Data Samples (Section 3.9).
This chapter describes:
❏ Introduction to the Type System (Section 3.1 on Page 3-4)
❏ Built-in Data Types (Section 3.2 on Page 3-7)
❏ Creating User Data Types with IDL (Section 3.3 on Page 3-52)
❏ Creating User Data Types with Extensible Markup Language (XML) (Section 3.4
on Page 3-83)
❏ Creating User Data Types with XML Schemas (XSD) (Section 3.5 on Page 3-91)
❏ Using rtiddsgen (Section 3.6 on Page 3-107)
❏ Using Generated Types without RTI Data Distribution Service (Standalone) (Sec-
tion 3.7 on Page 3-116)
❏ Using rtiddsgen (Section 3.6 on Page 3-107)
❏ Working with Data Samples (Section 3.9 on Page 3-125)

Chapter 3
3-4
3.1 Introduction to the Type System
A user data type is any custom type that your application defines for use with RTI Data
Distribution Service. It may be a structure, a union, a value type, an enumeration, or a
typedef (or language equivalents).
Your application can have any number of user data types. They can be composed of any
of the primitive data types listed below or of other user data types.
Only structures, unions, and value types may be read and written directly by RTI Data
Distribution Service; enums, typedefs, and primitive types must be contained within a
structure, union, or value type. In order for a DataReader and DataWriter to communi-
cate with each other, the data types associated with their respective Topic definitions
must be identical.
❏ octet, char, wchar
❏ short, unsigned short
❏ long, unsigned long
❏ long long, unsigned long long
❏ float
❏ double, long double
❏ boolean
❏ enum (with or without explicit values)
❏ bounded and unbounded string and wstring
The following type-building constructs are also supported:
❏ module (also called a package or namespace)
❏ pointer
❏ array of primitive or user type elements
❏ bounded/unbounded sequence of elements
1
—a sequence is a variable-length
ordered collection, such as a vector or list
❏ typedef
1. Sequences of sequences are not supported directly. To work around this constraint, typedef the inner
sequence and form a sequence of that new type.

3.1 Introduction to the Type System
3-5
3. User Data Types
❏ bitfield
1
❏ union
❏ struct
❏ value type, a complex type that supports inheritance and other object-oriented
features
To use a data type with RTI Data Distribution Service, you must define that type in a way
the middleware understands and then register the type with the middleware. These
steps allow RTI Data Distribution Service to serialize, deserialize, and otherwise operate
on specific types. They will be described in detail in the following sections.
3.1.1 Sequences
A sequence contains an ordered collection of elements that are all of the same type. The
operations supported in the sequence are documented in the Sequence Support section
under the Infrastructure Module in the online API documentation.
Java sequences implement the java.util.List interface from the standard Collections
framework.
C++ users will find sequences conceptually similar to the deque class in the Standard
Template Library (STL).
Elements in a sequence are accessed with their index, just like elements in an array. Indi-
ces start from zero. Unlike arrays, however, sequences can grow in size. A sequence has
two sizes associated with it: a physical size (the "maximum") and a logical size (the
"length"). The physical size indicates how many elements are currently allocated by the
sequence to hold; the logical size indicates how many valid elements the sequence actu-
ally holds. The length can vary from zero up to the maximum. Elements cannot be
accessed at indices beyond the current length.
A sequence may be declared as bounded or unbounded. A sequence's "bound" is the
greatest value its maximum may take. The bound is very important because it allows
RTI Data Distribution Service to preallocate buffers to hold serialized and deserialized
samples of your types; these buffers are used when communicating with other nodes in
your distributed system. If a sequence had no bound, RTI Data Distribution Service
would not know how large to allocate its buffers and would therefore have to allocate
them on the fly as individual samples were read and written—severely impacting the
latency and determinism of your application. Therefore, RTI Data Distribution Service
supports only bounded sequences; any unbounded sequences found in an IDL file will
1. Data types containing bitfield members are not supported by DynamicData.

Chapter 3
3-6
be given a default bound of 100 elements (see rtiddsgen Command-Line Arguments
(Section 3.6.1)).
3.1.2 Strings and Wide Strings
RTI Data Distribution Service, supports both strings consisting of single-byte characters
(the IDL string type) and strings consisting of wide characters (IDL wstring). The wide
characters supported by RTI Data Distribution Service are four bytes long, large enough
to store not only two-byte Unicode/UTF16 characters but also UTF32 characters.
Like sequences, strings may be bounded or unbounded. A string's "bound" is its maxi-
mum length (not counting the trailing NULL character in C and C++).
3.1.3 Introduction to TypeCode
Type schemas—the names and definitions of a type and its fields—are represented by
TypeCode objects. A type code value consists of a type code kind (see the TCKind enu-
meration below) and a list of members. For compound types like structs and arrays, this
list will recursively include one or more type code values.
enum TCKind {
TK_NULL,
TK_SHORT,
TK_LONG,
TK_USHORT,
TK_ULONG,
TK_FLOAT,
TK_DOUBLE,
TK_BOOLEAN,
TK_CHAR,
TK_OCTET,
TK_STRUCT,
TK_UNION,
TK_ENUM,
TK_STRING,
TK_SEQUENCE,
TK_ARRAY,
TK_ALIAS,
TK_LONGLONG,
TK_ULONGLONG,
TK_LONGDOUBLE,
TK_WCHAR,
TK_WSTRING,
TK_VALUE,
TK_SPARSE
}

3.2 Built-in Data Types
3-7
3. User Data Types
Type codes unambiguously match type representations and provide a more reliable test
than comparing the string type names.
The TypeCode class, modeled after the corresponding CORBA API, provides access to
type-code information. For details on the available operations for the TypeCode class,
see the online documentation (select Modules, Topic Module, Type Code Support).
3.1.3.1 Sending TypeCodes on the Network
In addition to being used locally, serialized type codes are typically published automat-
ically during discovery as part of the built-in topics for publications and subscriptions.
See Built-in DataReaders (Section 14.2). This allows applications to publish or subscribe
to topics of arbitrary types. This functionality is useful for generic system monitoring
tools like the rtiddsspy debug tool (in the online documentation, select Modules, Pro-
gramming Too ls ).
Note: Type codes are not cached by RTI Data Distribution Service upon receipt and are
therefore not available from the built-in data returned by the DataWriter's
get_matched_subscription_data() operation or the DataReader's
get_matched_publication_data() operation.
If your data type has an especially complex type code, you may need to increase the
value of the type_code_max_serialized_length field in the DomainParticipant's
DOMAIN_PARTICIPANT_RESOURCE_LIMITS QosPolicy (DDS Extension) (Section
8.5.4). Or, to prevent the propagation of type codes altogether, you can set this value to
zero (0). Be aware that some features of monitoring tools, as well as some features of the
middleware itself (such as ContentFilteredTopics) will not work correctly if you disable
TypeCode propagation.
3.2 Built-in Data Types
RTI Data Distribution Service provides a set of standard types that are built into the mid-
dleware. These types can be used immediately; they do not require writing IDL, invok-
ing the rtiddsgen utility (see Section 3.6), or using the dynamic type API (see
Section 3.2.8).
The supported built-in types are String, KeyedString, Octets, and KeyedOctets. (The
latter two types are called Bytes and KeyedBytes, respectively, on Java and .Net plat-
forms.)

Chapter 3
3-8
The built-in type API is located under the DDS namespace in C++ and .Net. For Java,
the API is contained inside the package com.rti.dds.type.builtin.
built-in data types are discussed in following sections:
❏ Registering Built-in Types (Section 3.2.1)
❏ Creating Topics for Built-in Types (Section 3.2.2)
❏ Creating ContentFilteredTopics for Built-in Types (Section 3.2.3)
❏ String Built-in Type (Section 3.2.4)
❏ KeyedString Built-in Type (Section 3.2.5)
❏ Octets Built-in Type (Section 3.2.6)
❏ KeyedOctets Built-in Type (Section 3.2.7)
❏ String Built-in Type (Section 3.2.4)
3.2.1 Registering Built-in Types
By default, the built-in types are automatically registered when a DomainParticipant is
created. You can change this behavior by setting the DomainParticipant’s
dds.builtin_type.auto_register property to 0 (false) using the PROPERTY QosPolicy
(DDS Extension) (Section 6.5.15).
3.2.2 Creating Topics for Built-in Types
To create a topic for a built-in type, just use the standard DomainParticipant operations,
create_topic() or create_topic_with_profile() (see Creating Topics (Section 5.1.1)); for
the type_name parameter, use the value returned by the get_type_name() operation,
listed below for each API.
Note: In the following examples, you will see the sentinel "<BuiltinType>."
For C and C++: <BuiltinType> = String, KeyedString, Octets or KeyedOctets
For Java and .Net: <BuiltinType> = String, KeyedString, Bytes or KeyedBytes
C API:
const char* DDS_<BuiltinType>TypeSupport_get_type_name();
C++ API with namespace:
const char* DDS::<BuiltinType>TypeSupport::get_type_name();

3.2 Built-in Data Types
3-9
3. User Data Types
C++ API without namespace:
const char* DDS<BuiltinType>TypeSupport::get_type_name();
C++/CLI API:
System::String^ DDS:<BuiltinType>TypeSupport::get_type_name();
C# API:
System.String DDS.<BuiltinType>TypeSupport.get_type_name();
Java API:
String
com.rti.dds.type.builtin.<BuiltinType>TypeSupport.get_type_name();
3.2.2.1 Topic Creation Examples
For simplicity, error handling is not shown in the following examples.
C Example:
DDS_Topic * topic = NULL;
/* Create a builtin type Topic */
topic = DDS_DomainParticipant_create_topic(
participant, "StringTopic",
DDS_StringTypeSupport_get_type_name(),
&DDS_TOPIC_QOS_DEFAULT,
NULL, DDS_STATUS_MASK_NONE);
C++ Example with Namespaces:
using namespace DDS;
...
/* Create a String builtin type Topic */
Topic * topic = participant->create_topic(
"StringTopic", StringTypeSupport::get_type_name(),
DDS_TOPIC_QOS_DEFAULT,
NULL, DDS_STATUS_MASK_NONE);

Chapter 3
3-10
C++/CLI Example:
using namespace DDS;
...
/* Create a builtin type Topic */
Topic^ topic = participant->create_topic(
"StringTopic", StringTypeSupport::get_type_name(),
DomainParticipant::TOPIC_QOS_DEFAULT,
nullptr, StatusMask::STATUS_MASK_NONE);
C# Example:
using namespace DDS;
...
/* Create a builtin type Topic */
Topic topic = participant.create_topic(
"StringTopic", StringTypeSupport.get_type_name(),
DomainParticipant.TOPIC_QOS_DEFAULT,
null, StatusMask.STATUS_MASK_NONE);
Java Example:
import com.rti.dds.type.builtin.*;
...
/* Create a builtin type Topic */
Topic topic = participant.create_topic(
"StringTopic", StringTypeSupport.get_type_name(),
DomainParticipant.TOPIC_QOS_DEFAULT,
null, StatusKind.STATUS_MASK_NONE);
3.2.3 Creating ContentFilteredTopics for Built-in Types
To create a ContentFilteredTopic for a built-in type, just use the standard DomainPartici-
pant operations, create_contentfilteredtopic() or
create_contentfilteredtopic_with_filter (see Section 5.4.3).
The field names used in the filter expressions for the built-in SQL (see Section 5.4.6) and
StringMatch filters (see Section 5.4.7) must correspond to the names provided in the IDL
description of the built-in types (see Section 3.2.4).

3.2 Built-in Data Types
3-11
3. User Data Types
3.2.3.1 ContentFilteredTopic Creation Examples
For simplicity, error handling is not shown in the following examples.
C Example:
DDS_Topic * topic = NULL;
DDS_ContentFilteredTopic * contentFilteredTopic = NULL;
struct DDS_StringSeq parameters = DDS_SEQUENCE_INITIALIZER;
/* Create a string ContentFilteredTopic */
topic = DDS_DomainParticipant_create_topic(
participant, "StringTopic",
DDS_StringTypeSupport_get_type_name(),
&DDS_TOPIC_QOS_DEFAULT,
NULL, DDS_STATUS_MASK_NONE);
contentFilteredTopic =
DDS_DomainParticipant_create_contentfilteredtopic(
participant, "StringContentFilteredTopic",
topic, "value = 'Hello World!'",
¶meters);
C++ Example with Namespaces:
using namespace DDS;
...
/* Create a String ContentFilteredTopic */
Topic * topic = participant->create_topic(
"StringTopic", StringTypeSupport::get_type_name(),
TOPIC_QOS_DEFAULT,
NULL, STATUS_MASK_NONE);
StringSeq parameters;
ContentFilteredTopic * contentFilteredTopic =
participant->create_contentfilteredtopic(
"StringContentFilteredTopic", topic,
"value = 'Hello World!'", parameters);

Chapter 3
3-12
C++/CLI Example:
using namespace DDS;
...
/* Create a String ContentFilteredTopic */
Topic^ topic = participant->create_topic(
"StringTopic", StringTypeSupport::get_type_name(),
DomainParticipant::TOPIC_QOS_DEFAULT,
nullptr, StatusMask::STATUS_MASK_NONE);
StringSeq^ parameters = gcnew StringSeq();
ContentFilteredTopic^ contentFilteredTopic =
participant->create_contentfilteredtopic(
"StringContentFilteredTopic", topic,
"value = 'Hello World!'", parameters);
C# Example:
using namespace DDS;
...
/* Create a String ContentFilteredTopic */
Topic topic = participant.create_topic(
"StringTopic", StringTypeSupport.get_type_name(),
DomainParticipant.TOPIC_QOS_DEFAULT,
null, StatusMask.STATUS_MASK_NONE);
StringSeq parameters = new StringSeq();
ContentFilteredTopic contentFilteredTopic =
participant.create_contentfilteredtopic(
"StringContentFilteredTopic", topic,
"value = 'Hello World!'", parameters);
3.2 Built-in Data Types
3-13
3. User Data Types
Java Example:
import com.rti.dds.type.builtin.*;
...
/* Create a String ContentFilteredTopic */
Topic topic = participant.create_topic(
"StringTopic", StringTypeSupport.get_type_name(),
DomainParticipant.TOPIC_QOS_DEFAULT,
null, StatusKind.STATUS_MASK_NONE);
StringSeq parameters = new StringSeq();
ContentFilteredTopic contentFilteredTopic =
participant.create_contentfilteredtopic(
"StringContentFilteredTopic", topic,
"value = 'Hello World!'", parameters);
3.2.4 String Built-in Type
The String built-in type is represented by a NULL-terminated character array (char *) in
C and C++ and an immutable String object in Java and .Net. This type can be used to
publish and subscribe to a single string.
3.2.4.1 Creating and Deleting Strings
In C and C++, RTI Data Distribution Service provides a set of operations to create
(DDS::String_alloc()), destroy (DDS::String_free()), and clone strings
(DDS::String_dup()). Select Modules, DDS API Reference, Infrastructure Module,
String support in the online documentation for more details.
Memory Considerations in Copy Operations:
When the read/take operations that take a sequence of strings as a parameter are
used in copy mode, RTI Data Distribution Service allocates the memory for the
string elements in the sequence if they are initialized to NULL.
If the elements are not initialized to NULL, the behavior depends on the lan-
guage:
• In Java and .NET, the memory associated with the elements is reallocated
with every sample, because strings are immutable objects.
• In C and C++, the memory associated with the elements must be large
enough to hold the received data. Insufficient memory may result in
crashes.

Chapter 3
3-14
When take_next_sample() and read_next_sample() are called in C and C++, you
must make sure that the input string has enough memory to hold the received
data. Insufficient memory may result in crashes.
3.2.4.2 String DataWriter
The string DataWriter API matches the standard DataWriter API (see Using a Type-Spe-
cific DataWriter (FooDataWriter) (Section 6.3.6)). There are no extensions.
The following examples show how to write simple strings with a string built-in type
DataWriter. For simplicity, error handling is not shown.
C Example:
DDS_StringDataWriter * stringWriter = ... ;
DDS_ReturnCode_t retCode;
char * str = NULL;
/* Write some data */
retCode = DDS_StringDataWriter_write(
stringWriter, "Hello World!", &DDS_HANDLE_NIL);
str = DDS_String_dup("Hello World!");
retCode = DDS_StringDataWriter_write(stringWriter, str,
&DDS_HANDLE_NIL);
DDS_String_free(str);
C++ Example with Namespaces:
#include "ndds/ndds_namespace_cpp.h"
using namespace DDS;
...
StringDataWriter * stringWriter = ... ;
/* Write some data */
ReturnCode_t retCode = stringWriter->write(
"Hello World!", HANDLE_NIL);
char * str = DDS::String_dup("Hello World!");
retCode = stringWriter->write(str, HANDLE_NIL);
DDS::String_free(str);
C++/CLI Example:
using namespace System;
using namespace DDS;

3.2 Built-in Data Types
3-15
3. User Data Types
...
StringDataWriter^ stringWriter = ... ;
/* Write some data */
stringWriter->write("Hello World!", InstanceHandle_t::HANDLE_NIL);
String^ str = "Hello World!";
stringWriter->write(str, InstanceHandle_t::HANDLE_NIL);
C# Example:
using System;
using DDS;
...
StringDataWriter stringWriter = ... ;
/* Write some data */
stringWriter.write("Hello World!", InstanceHandle_t.HANDLE_NIL);
String str = "Hello World!";
stringWriter.write(str, InstanceHandle_t.HANDLE_NIL);
Java Example:
import com.rti.dds.publication.*;
import com.rti.dds.type.builtin.*;
import com.rti.dds.infrastructure.*;
...
StringDataWriter stringWriter = ... ;
/* Write some data */
stringWriter.write("Hello World!", InstanceHandle_t.HANDLE_NIL);
String str = "Hello World!";
stringWriter.write(str, InstanceHandle_t.HANDLE_NIL);
3.2.4.3 String DataReader
The string DataReader API matches the standard DataReader API (see Using a Type-Spe-
cific DataReader (FooDataReader) (Section 7.4.1)). There are no extensions.
The following examples show how to read simple strings with a string built-in type
DataReader. For simplicity, error handling is not shown.

Chapter 3
3-16
C Example:
struct DDS_StringSeq dataSeq = DDS_SEQUENCE_INITIALIZER;
struct DDS_SampleInfoSeq infoSeq = DDS_SEQUENCE_INITIALIZER;
DDS_StringDataReader * stringReader = ... ;
DDS_ReturnCode_t retCode;
int i;
/* Take and print the data */
retCode = DDS_StringDataReader_take(stringReader, &dataSeq,
&infoSeq, DDS_LENGTH_UNLIMITED,
DDS_ANY_SAMPLE_STATE,
DDS_ANY_VIEW_STATE,
DDS_ANY_INSTANCE_STATE);
for (i = 0; i < DDS_StringSeq_get_length(&data_seq); ++i) {
if (DDS_SampleInfoSeq_get_reference(&info_seq, i)->valid_data) {
DDS_StringTypeSupport_print_data(
DDS_StringSeq_get(&data_seq, i));
}
}
/* Return loan */
retCode = DDS_StringDataReader_return_loan(stringReader,
&data_seq, &info_seq);
C++ Example with Namespaces:
#include "ndds/ndds_namespace_cpp.h"
using namespace DDS;
...
StringSeq dataSeq;
SampleInfoSeq infoSeq;
StringDataReader * stringReader = ... ;
/* Take a print the data */
ReturnCode_t retCode = stringReader->take(dataSeq, infoSeq,
LENGTH_UNLIMITED,
ANY_SAMPLE_STATE,
ANY_VIEW_STATE,
ANY_INSTANCE_STATE);

3.2 Built-in Data Types
3-17
3. User Data Types
for (int i = 0; i < data_seq.length(); ++i) {
if (infoSeq[i].valid_data) {
StringTypeSupport::print_data(dataSeq[i]);
}
}
/* Return loan */
retCode = stringReader->return_loan(dataSeq, infoSeq);
C++/CLI Example:
using namespace System;
using namespace DDS;
...
StringSeq^ dataSeq = gcnew StringSeq();
SampleInfoSeq^ infoSeq = gcnew SampleInfoSeq();
StringDataReader^ stringReader = ... ;
/* Take and print the data */
stringReader->take(dataSeq, infoSeq,
ResourceLimitsQosPolicy::LENGTH_UNLIMITED,
SampleStateKind::ANY_SAMPLE_STATE,
ViewStateKind::ANY_VIEW_STATE,
InstanceStateKind::ANY_INSTANCE_STATE);
for (int i = 0; i < data_seq.length(); ++i) {
if (infoSeq->get_at(i)->valid_data) {
StringTypeSupport::print_data(dataSeq->get_at(i));
}
}
/* Return loan */
stringReader->return_loan(dataSeq, infoSeq);
C# Example:
using System;
using DDS;
...
StringSeq dataSeq = new StringSeq();
SampleInfoSeq infoSeq = new SampleInfoSeq();
StringDataReader stringReader = ... ;

Chapter 3
3-18
/* Take and print the data */
stringReader.take(dataSeq, infoSeq,
ResourceLimitsQosPolicy.LENGTH_UNLIMITED,
SampleStateKind.ANY_SAMPLE_STATE,
ViewStateKind.ANY_VIEW_STATE,
InstanceStateKind.ANY_INSTANCE_STATE);
for (int i = 0; i < data_seq.length(); ++i) {
if (infoSeq.get_at(i)).valid_data) {
StringTypeSupport.print_data(dataSeq.get_at(i));
}
}
/* Return loan */
stringReader.return_loan(dataSeq, infoSeq);
Java Example:
import com.rti.dds.infrastructure.*;
import com.rti.dds.subscription.*;
import com.rti.dds.type.builtin.*;
...
StringSeq dataSeq = new StringSeq();
SampleInfoSeq infoSeq = new SampleInfoSeq();
StringDataReader stringReader = ... ;
/* Take and print the data */
stringReader.take(dataSeq, infoSeq,
ResourceLimitsQosPolicy.LENGTH_UNLIMITED,
SampleStateKind.ANY_SAMPLE_STATE,
ViewStateKind.ANY_VIEW_STATE,
InstanceStateKind.ANY_INSTANCE_STATE);
for (int i = 0; i < data_seq.length(); ++i) {
if (((SampleInfo)infoSeq.get(i)).valid_data) {
System.out.println((String)dataSeq.get(i));
}
}
/* Return loan */
stringReader.return_loan(dataSeq, infoSeq);

3.2 Built-in Data Types
3-19
3. User Data Types
3.2.5 KeyedString Built-in Type
The Keyed String built-in type is represented by a (key, value) pair, where key and value
are strings. This type can be used to publish and subscribe to keyed strings. The lan-
guage specific representations of the type are as follows:
C/C++ Representation (without namespaces):
struct DDS_KeyedString {
char * key;
char * value;
};
C++/CLI Representation:
namespace DDS {
public ref struct KeyedString: {
public:
System::String^ key;
System::String^ value;
...
};
};
C# Representation:
namespace DDS {
public class KeyedString {
public System.String key;
public System.String value;
};
};
Java Representation:
package com.rti.dds.type.builtin;
class KeyedString {
public String key;
public String value;
...
}
3.2.5.1 Creating and Deleting Keyed Strings
RTI Data Distribution Service provides a set of constructors/destructors to create/destroy
Keyed Strings. Select Modules, DDS API Reference, Topic Module, Built-in Types in
online documentation for details.

Chapter 3
3-20
If you want to manipulate the memory of the fields 'value' and 'key' in the KeyedString
struct in C/C++, use the operations DDS::String_alloc(), DDS::String_dup(), and
DDS::String_free(), as described in the online documentation (select Modules, DDS
API Reference, Infrastructure Module, String Support).
3.2.5.2 Keyed String DataWriter
The keyed string DataWriter API is extended with the following methods (in addition to
the standard methods described in Using a Type-Specific DataWriter (FooDataWriter)
(Section 6.3.6)):
DDS::ReturnCode_t DDS::KeyedStringDataWriter::dispose(
const char* key,
const DDS::InstanceHandle_t* instance_handle);
DDS::ReturnCode_t DDS::KeyedStringDataWriter::dispose_w_timestamp(
const char* key,
const DDS::InstanceHandle_t* instance_handle,
const struct DDS::Time_t* source_timestamp);
DDS::ReturnCode_t DDS::KeyedStringDataWriter::get_key_value(
char * key,
const DDS::InstanceHandle_t* handle);
DDS::InstanceHandle_t DDS::KeyedStringDataWriter::lookup_instance(
const char * key);
DDS::InstanceHandle_t DDS::KeyedStringDataWriter::register_instance(
const char* key);
DDS::InstanceHandle_t
DDS_KeyedStringDataWriter::register_instance_w_timestamp(
const char * key,
const struct DDS_Time_t* source_timestamp);
DDS::ReturnCode_t
DDS::KeyedStringDataWriter::unregister_instance(
const char * key,
const DDS::InstanceHandle_t* handle);

3.2 Built-in Data Types
3-21
3. User Data Types
DDS::ReturnCode_t
DDS::KeyedStringDataWriter::unregister_instance_w_timestamp(
const char* key,
const DDS::InstanceHandle_t* handle,
const struct DDS::Time_t* source_timestamp);
DDS::ReturnCode_t DDS::KeyedStringDataWriter::write (
const char * key,
const char * str,
const DDS::InstanceHandle_t* handle);
DDS::ReturnCode_t DDS::KeyedStringDataWriter::write_w_timestamp(
const char * key,
const char * str,
const DDS::InstanceHandle_t* handle,
const struct DDS::Time_t* source_timestamp);
These operations are introduced to provide maximum flexibility in the format of the
input parameters for the write and instance management operations. For additional
information and a complete description of the operations in all supported languages,
see the online documentation.
The following examples show how to write keyed strings using a keyed string built-in
type DataWriter and some of the extended APIs. For simplicity, error handling is not
shown.
C Example:
DDS_KeyedStringDataWriter * stringWriter = ... ;
DDS_ReturnCode_t retCode;
struct DDS_KeyedString * keyedStr = NULL;
char * str = NULL;
/* Write some data using the KeyedString structure */
keyedStr = DDS_KeyedString_new(255, 255);
strcpy(keyedStr->key, "Key 1");
strcpy(keyedStr->value, "Value 1");
retCode = DDS_KeyedStringDataWriter_write_string_w_key(
stringWriter, keyedStr,
&DDS_HANDLE_NIL);
DDS_KeyedString_delete(keyedStr);
/* Write some data using individual strings */

Chapter 3
3-22
retCode = DDS_KeyedStringDataWriter_write_string_w_key(
stringWriter, "Key 1",
"Value 1", &DDS_HANDLE_NIL);
str = DDS_String_dup("Value 2");
retCode = DDS_KeyedStringDataWriter_write_string_w_key(
stringWriter, "Key 1",
str, &DDS_HANDLE_NIL);
DDS_String_free(str);
C++ Example with Namespaces:
#include "ndds/ndds_namespace_cpp.h"
using namespace DDS;
...
KeyedStringDataWriter * stringWriter = ... ;
/* Write some data using the KeyedString */
KeyedString * keyedStr = new KeyedString(255, 255);
strcpy(keyedStr->key, "Key 1");
strcpy(keyedStr->value, "Value 1");
ReturnCode_t retCode = stringWriter->write(keyedStr, HANDLE_NIL);
delete keyedStr;
/* Write some data using individual strings */
retCode = stringWriter->write("Key 1", "Value 1", HANDLE_NIL);
char * str = String_dup("Value 2");
retCode = stringWriter->write("Key 1", str, HANDLE_NIL);
String_free(str);
C++/CLI Example:
using namespace System;
using namespace DDS;
...
KeyedStringDataWriter^ stringWriter = ... ;
/* Write some data using the KeyedString */
KeyedString^ keyedStr = gcnew KeyedString();

3.2 Built-in Data Types
3-23
3. User Data Types
keyedStr->key = "Key 1";
keyedStr->value = "Value 1";
stringWriter->write(keyedStr, InstanceHandle_t::HANDLE_NIL);
/* Write some data using individual strings */
stringWriter->write("Key 1","Value 1",InstanceHandle_t::HANDLE_NIL);
String^ str = "Value 2";
stringWriter->write("Key 1", str, InstanceHandle_t::HANDLE_NIL);
C# Example
using System;
using DDS;
...
KeyedStringDataWriter stringWriter = ... ;
/* Write some data using the KeyedString */
KeyedString keyedStr = new KeyedString();
keyedStr.key = "Key 1";
keyedStr.value = "Value 1";
stringWriter.write(keyedStr, InstanceHandle_t.HANDLE_NIL);
/* Write some data using individual strings */
stringWriter.write("Key 1", "Value 1", InstanceHandle_t.HANDLE_NIL);
String str = "Value 2";
stringWriter.write("Key 1", str, InstanceHandle_t.HANDLE_NIL);
Java Example :
import com.rti.dds.publication.*;
import com.rti.dds.type.builtin.*;
import com.rti.dds.infrastructure.*;
...
KeyedStringDataWriter stringWriter = ... ;
/* Write some data using the KeyedString */
KeyedString keyedStr = new KeyedString();
keyedStr.key = "Key 1";
keyedStr.value = "Value 1";

Chapter 3
3-24
stringWriter.write(keyedStr, InstanceHandle_t.HANDLE_NIL);
/* Write some data using individual strings */
stringWriter.write("Key 1", "Value 1", InstanceHandle_t.HANDLE_NIL);
String str = "Value 2";
stringWriter.write("Key 1", str, InstanceHandle_t.HANDLE_NIL);
3.2.5.3 Keyed String DataReader
The KeyedString DataReader API is extended with the following operations (in addition
to the standard methods described in Using a Type-Specific DataReader (FooDa-
taReader) (Section 7.4.1)):
DDS::ReturnCode_t DDS::KeyedStringDataReader::get_key_value(
char * key,
const DDS::InstanceHandle_t* handle);
DDS::InstanceHandle_t DDS::KeyedStringDataReader::lookup_instance(
const char * key);
For additional information and a complete description of these operations in all sup-
ported languages, see the online documentation.
Memory considerations in copy operations:
For read/take operations with copy semantics, such as read_next_sample() and
take_next_sample(), RTI Data Distribution Service allocates memory for the fields
'value' and 'key' if they are initialized to NULL.
If the fields are not initialized to NULL, the behavior depends on the language:
• In Java and .NET, the memory associated to the fields 'value' and 'key' will
be reallocated with every sample.
• In C and C++, the memory associated with the fields 'value' and 'key'
must be large enough to hold the received data. Insufficient memory may
result in crashes.
The following examples show how to read keyed strings with a keyed string built-in
type DataReader. For simplicity, error handling is not shown.
C Example:
struct DDS_KeyedStringSeq dataSeq = DDS_SEQUENCE_INITIALIZER;
struct DDS_SampleInfoSeq infoSeq = DDS_SEQUENCE_INITIALIZER;
DDS_KeyedKeyedStringDataReader * stringReader = ... ;

3.2 Built-in Data Types
3-25
3. User Data Types
DDS_ReturnCode_t retCode;
int i;
/* Take and print the data */
retCode = DDS_KeyedStringDataReader_take(stringReader, &dataSeq,
&infoSeq,
DDS_LENGTH_UNLIMITED,
DDS_ANY_SAMPLE_STATE,
DDS_ANY_VIEW_STATE,
DDS_ANY_INSTANCE_STATE);
for (i = 0; i < DDS_KeyedStringSeq_get_length(&data_seq); ++i) {
if (DDS_SampleInfoSeq_get_reference(&info_seq, i)->valid_data) {
DDS_KeyedStringTypeSupport_print_data(
DDS_KeyedStringSeq_get_reference(&data_seq, i));
}
}
/* Return loan */
retCode = DDS_KeyedStringDataReader_return_loan(
stringReader, &data_seq, &info_seq);
C++ Example with Namespaces:
#include "ndds/ndds_namespace_cpp.h"
using namespace DDS;
...
KeyedStringSeq dataSeq;
SampleInfoSeq infoSeq;
KeyedStringDataReader * stringReader = ... ;
/* Take a print the data */
ReturnCode_t retCode = stringReader->take(dataSeq, infoSeq,
LENGTH_UNLIMITED,
ANY_SAMPLE_STATE,
ANY_VIEW_STATE,
ANY_INSTANCE_STATE);
for (int i = 0; i < data_seq.length(); ++i) {
if (infoSeq[i].valid_data) {
KeyedStringTypeSupport::print_data(&dataSeq[i]);
}
}
/* Return loan */
retCode = stringReader->return_loan(dataSeq, infoSeq);

Chapter 3
3-26
C++/CLI Example:
using namespace System;
using namespace DDS;
...
KeyedStringSeq^ dataSeq = gcnew KeyedStringSeq();
SampleInfoSeq^ infoSeq = gcnew SampleInfoSeq();
KeyedStringDataReader^ stringReader = ... ;
/* Take and print the data */
stringReader->take(dataSeq, infoSeq,
ResourceLimitsQosPolicy::LENGTH_UNLIMITED,
SampleStateKind::ANY_SAMPLE_STATE,
ViewStateKind::ANY_VIEW_STATE,
InstanceStateKind::ANY_INSTANCE_STATE);
for (int i = 0; i < data_seq.length(); ++i) {
if (infoSeq->get_at(i)->valid_data) {
KeyedStringTypeSupport::print_data(dataSeq->get_at(i));
}
}
/* Return loan */
stringReader->return_loan(dataSeq, infoSeq);
C# Example:
using System;
using DDS;
...
KeyedStringSeq dataSeq = new KeyedStringSeq();
SampleInfoSeq infoSeq = new SampleInfoSeq();
KeyedStringDataReader stringReader = ... ;
/* Take and print the data */
stringReader.take(dataSeq, infoSeq,
ResourceLimitsQosPolicy.LENGTH_UNLIMITED,
SampleStateKind.ANY_SAMPLE_STATE,
ViewStateKind.ANY_VIEW_STATE,
InstanceStateKind.ANY_INSTANCE_STATE);

3.2 Built-in Data Types
3-27
3. User Data Types
for (int i = 0; i < data_seq.length(); ++i) {
if (infoSeq.get_at(i)).valid_data) {
KeyedStringTypeSupport.print_data(dataSeq.get_at(i));
}
}
/* Return loan */
stringReader.return_loan(dataSeq, infoSeq);
Java Example:
import com.rti.dds.infrastructure.*;
import com.rti.dds.subscription.*;
import com.rti.dds.type.builtin.*;
...
KeyedStringSeq dataSeq = new KeyedStringSeq();
SampleInfoSeq infoSeq = new SampleInfoSeq();
KeyedStringDataReader stringReader = ... ;
/* Take and print the data */
stringReader.take(dataSeq, infoSeq,
ResourceLimitsQosPolicy.LENGTH_UNLIMITED,
SampleStateKind.ANY_SAMPLE_STATE,
ViewStateKind.ANY_VIEW_STATE,
InstanceStateKind.ANY_INSTANCE_STATE);
for (int i = 0; i < data_seq.length(); ++i) {
if (((SampleInfo)infoSeq.get(i)).valid_data) {
System.out.println((
(KeyedString)dataSeq.get(i)).toString());
}
}
/* Return loan */
stringReader.return_loan(dataSeq, infoSeq);
3.2.6 Octets Built-in Type
The octets built-in type is used to send sequences of octets. The language-specific repre-
sentations are as follows:
C/C++ Representation (without Namespaces):
struct DDS_Octets {
int length;
unsigned char * value;
};

Chapter 3
3-28
C++/CLI Representation:
namespace DDS {
public ref struct Bytes: {
public:
System::Int32 length;
System::Int32 offset;
array<System::Byte>^ value;
...
};
};
C# Representation:
namespace DDS {
public class Bytes {
public System.Int32 length;
public System.Int32 offset;
public System.Byte[] value;
...
};
};
Java Representation:
package com.rti.dds.type.builtin;
public class Bytes implements Copyable {
public int length;
public int offset;
public byte[] value;
...
};
3.2.6.1 Creating and Deleting Octets
RTI Data Distribution Service provides a set of constructors/destructors to create and
destroy Octet objects. For details, select Modules, DDS API Reference, Topic Module,
Built-in Types in the online documentation.
If you want to manipulate the memory of the value field inside the Octets struct in C/
C++, use the operations DDS::OctetBuffer_alloc(), DDS::OctetBuffer_dup(), and
DDS::OctetBuffer_free(), described in the online documentation (select Modules,
DDS API Reference, Infrastructure Module, Octet Buffer Support).
3.2 Built-in Data Types
3-29
3. User Data Types
3.2.6.2 Octets DataWriter
In addition to the standard methods (see Using a Type-Specific DataWriter (Foo-
DataWriter) (Section 6.3.6)), the octets DataWriter API is extended with the following
methods:
DDS::ReturnCode_t DDS::OctetsDataWriter::write(
const DDS::OctetSeq & octets,
const DDS::InstanceHandle_t & handle);
DDS::ReturnCode_t DDS::OctetsDataWriter::write(
const unsigned char * octets,
int length,
const DDS::InstanceHandle_t& handle);
DDS::ReturnCode_t DDS::OctetsDataWriter::write_w_timestamp(
const DDS::OctetSeq & octets,
const DDS::InstanceHandle_t & handle,
const DDS::Time_t & source_timestamp);
DDS::ReturnCode_t DDS::OctetsDataWriter::write_w_timestamp(
const unsigned char * octets,
int length,
const DDS::InstanceHandle_t& handle,
const DDS::Time_t& source_timestamp);
These methods are introduced to provide maximum flexibility in the format of the input
parameters for the write operations. For additional information and a complete descrip-
tion of these operations in all supported languages, see the online documentation.
The following examples show how to write an array of octets using an octets built-in
type DataWriter and some of the extended APIs. For simplicity, error handling is not
shown.
C Example:
DDS_OctetsDataWriter * octetsWriter = ... ;
DDS_ReturnCode_t retCode;
struct DDS_Octets * octets = NULL;
char * octetArray = NULL;
/* Write some data using the Octets structure */
octets = DDS_Octets_new_w_size(1024);
octets->length = 2;
octets->value[0] = 46;
octets->value[1] = 47;

Chapter 3
3-30
retCode = DDS_OctetsDataWriter_write(octetsWriter, octets,
&DDS_HANDLE_NIL);
DDS_Octets_delete(octets);
/* Write some data using an octets array */
octetArray = (unsigned char *)malloc(1024);
octetArray[0] = 46;
octetArray[1] = 47;
retCode = DDS_OctetsDataWriter_write_octets (octetsWriter,
octetArray, 2,
&DDS_HANDLE_NIL);
free(octetArray);
C++ Example with Namespaces:
#include "ndds/ndds_namespace_cpp.h"
using namespace DDS;
...
OctetsDataWriter * octetsWriter = ... ;
/* Write some data using the Octets structure */
Octets * octets = new Octets(1024);
octets->length = 2;
octets->value[0] = 46;
octets->value[1] = 47;
ReturnCode_t retCode = octetsWriter->write(octets, HANDLE_NIL);
delete octets;
/* Write some data using an octet array */
unsigned char * octetArray = new unsigned char[1024];
octetArray[0] = 46;
octetArray[1] = 47;
retCode = octetsWriter->write(octetArray, 2, HANDLE_NIL);
delete []octetArray;

3.2 Built-in Data Types
3-31
3. User Data Types
C++/CLI Example:
using namespace System;
using namespace DDS;
...
BytesDataWriter^ octetsWriter = ...;
/* Write some data using Bytes */
Bytes^ octets = gcnew Bytes(1024);
octets->value[0] =46;
octets->value[1] =47;
octets.length = 2;
octets.offset = 0;
octetWriter->write(octets, InstanceHandle_t::HANDLE_NIL);
/* Write some data using individual strings */
array<Byte>^ octetAray = gcnew array<Byte>(1024);
octetArray[0] = 46;
octetArray[1] = 47;
octetsWriter->write(octetArray, 0, 2, InstanceHandle_t::HANDLE_NIL);
C# Example:
using System;
using DDS;
...
BytesDataWriter stringWriter = ...;
/* Write some data using the Bytes */
Bytes octets = new Bytes(1024);
octets.value[0] = 46;
octets.value[1] = 47;
octets.length = 2;
octets.offset = 0;
octetWriter.write(octets, InstanceHandle_t.HANDLE_NIL);
/* Write some data using individual strings */
byte[] octetArray = new byte[1024];
octetArray[0] = 46;
octetArray[1] = 47;
octetsWriter.write(octetArray, 0, 2, InstanceHandle_t.HANDLE_NIL);

Chapter 3
3-32
Java Example:
import com.rti.dds.publication.*;
import com.rti.dds.type.builtin.*;
import com.rti.dds.infrastructure.*;
...
BytesDataWriter octetsWriter = ... ;
/* Write some data using the Bytes class*/
Bytes octets = new Bytes(1024);
octets.length = 2;
octets.offset = 0;
octets.value[0] = 46;
octets.value[1] = 47;
octetsWriter.write(octets, InstanceHandle_t.HANDLE_NIL);
/* Write some data using a byte array */
byte[] octetArray = new byte[1024];
octetArray[0] = 46;
octetArray[1] = 47;
octetsWriter.write(octetArray, 0, 2, InstanceHandle_t.HANDLE_NIL);
3.2.6.3 Octets DataReader
The octets DataReader API matches the standard DataReader API (see Using a Type-Spe-
cific DataReader (FooDataReader) (Section 7.4.1)). There are no extensions.
Memory considerations in copy operations:
For read/take operations with copy semantics, such as read_next_sample() and
take_next_sample(), RTI Data Distribution Service allocates memory for the field
'value' if it is initialized to NULL.
If the field 'value' is not initialized to NULL, the behavior depends on the lan-
guage:
• In Java and .NET, the memory for the field 'value' will be reallocated if the
current size is not large enough to hold the received data.
• In C and C++, the memory associated with the field 'value' must be big
enough to hold the received data. Insufficient memory may result in
crashes.

3.2 Built-in Data Types
3-33
3. User Data Types
The following examples show how to read octets with an octets built-in type DataReader.
For simplicity, error handling is not shown.
C Example:
struct DDS_OctetsSeq dataSeq = DDS_SEQUENCE_INITIALIZER;
struct DDS_SampleInfoSeq infoSeq = DDS_SEQUENCE_INITIALIZER;
DDS_OctetsDataReader * octetsReader = ... ;
DDS_ReturnCode_t retCode;
int i;
/* Take and print the data */
retCode = DDS_OctetsDataReader_take(octetsReader, &dataSeq,
&infoSeq, DDS_LENGTH_UNLIMITED,
DDS_ANY_SAMPLE_STATE,
DDS_ANY_VIEW_STATE,
DDS_ANY_INSTANCE_STATE);
for (i = 0; i < DDS_OctetsSeq_get_length(&data_seq); ++i) {
if (DDS_SampleInfoSeq_get_reference(&info_seq, i)->valid_data) {
DDS_OctetsTypeSupport_print_data(
DDS_OctetsSeq_get_reference(&data_seq, i));
}
}
/* Return loan */
retCode = DDS_OctetsDataReader_return_loan(octetsReader, &data_seq,
&info_seq);
C++ Example with Namespaces:
#include "ndds/ndds_namespace_cpp.h"
using namespace DDS;
...
OctetsSeq dataSeq;
SampleInfoSeq infoSeq;
OctetsDataReader * octetsReader = ... ;
/* Take a print the data */
ReturnCode_t retCode = octetsReader->take(dataSeq, infoSeq,
LENGTH_UNLIMITED,
ANY_SAMPLE_STATE,
ANY_VIEW_STATE,
ANY_INSTANCE_STATE);

Chapter 3
3-34
for (int i = 0; i < data_seq.length(); ++i) {
if (infoSeq[i].valid_data) {
OctetsTypeSupport::print_data(&dataSeq[i]);
}
}
/* Return loan */
retCode = octetsReader->return_loan(dataSeq, infoSeq);
C++/CLI Example:
using namespace System;
using namespace DDS;
...
BytesSeq^ dataSeq = gcnew BytesSeq();
SampleInfoSeq^ infoSeq = gcnew SampleInfoSeq();
BytesDataReader^ octetsReader = ... ;
/* Take and print the data */
octetsReader->take(dataSeq, infoSeq,
ResourceLimitsQosPolicy::LENGTH_UNLIMITED,
SampleStateKind::ANY_SAMPLE_STATE,
ViewStateKind::ANY_VIEW_STATE,
InstanceStateKind::ANY_INSTANCE_STATE);
for (int i = 0; i < data_seq.length(); ++i) {
if (infoSeq->get_at(i)->valid_data) {
BytesTypeSupport::print_data(dataSeq->get_at(i));
}
}
/* Return loan */
octetsReader->return_loan(dataSeq, infoSeq);
C# Example:
using System;
using DDS;
...
BytesSeq dataSeq = new BytesSeq();
SampleInfoSeq infoSeq = new SampleInfoSeq();
BytesDataReader octetsReader = ... ;

3.2 Built-in Data Types
3-35
3. User Data Types
/* Take and print the data */
octetsReader.take(dataSeq, infoSeq,
ResourceLimitsQosPolicy.LENGTH_UNLIMITED,
SampleStateKind.ANY_SAMPLE_STATE,
ViewStateKind.ANY_VIEW_STATE,
InstanceStateKind.ANY_INSTANCE_STATE);
for (int i = 0; i < data_seq.length(); ++i) {
if (infoSeq.get_at(i)).valid_data) {
BytesTypeSupport.print_data(dataSeq.get_at(i));
}
}
/* Return loan */
octetsReader.return_loan(dataSeq, infoSeq);
Java Example:
import com.rti.dds.infrastructure.*;
import com.rti.dds.subscription.*;
import com.rti.dds.type.builtin.*;
...
BytesSeq dataSeq = new BytesSeq();
SampleInfoSeq infoSeq = new SampleInfoSeq();
BytesDataReader octetsReader = ... ;
/* Take and print the data */
octetsReader.take(dataSeq, infoSeq,
ResourceLimitsQosPolicy.LENGTH_UNLIMITED,
SampleStateKind.ANY_SAMPLE_STATE,
ViewStateKind.ANY_VIEW_STATE,
InstanceStateKind.ANY_INSTANCE_STATE);
for (int i = 0; i < data_seq.length(); ++i) {
if (((SampleInfo)infoSeq.get(i)).valid_data) {
System.out.println(((Bytes)dataSeq.get(i)).toString());
}
}
/* Return loan */
octetsReader.return_loan(dataSeq, infoSeq);

Chapter 3
3-36
3.2.7 KeyedOctets Built-in Type
The keyed octets built-in type is used to send sequences of octets with a key. The lan-
guage-specific representations of the type are as follows:
C/C++ Representation (without Namespaces):
struct DDS_KeyedOctets {
char * key;
int length;
unsigned char * value;
};
C++/CLI Representation:
namespace DDS {
public ref struct KeyedBytes {
public:
System::String^ key;
System::Int32 length;
System::Int32 offset;
array<System::Byte>^ value;
...
};
};
C# Representation:
namespace DDS {
public class KeyedBytes {
public System.String key;
public System.Int32 length;
public System.Int32 offset;
public System.Byte[] value;
…
};
};
Java Representation:
package com.rti.dds.type.builtin;
public class KeyedBytes {
public String key;
public int length;
public int offset;
public byte[] value;
...
};

3.2 Built-in Data Types
3-37
3. User Data Types
3.2.7.1 Creating and Deleting KeyedOctets
RTI Data Distribution Service provides a set of constructors/destructors to create/destroy
KeyedOctets objects. For details, see the online documentation (select Modules, DDS
API Reference, Topic Module, Built-in Types).
To manipulate the memory of the value field in the KeyedOctets struct in C/C++: use
DDS::OctetBuffer_alloc(), DDS::OctetBuffer_dup(), and DDS::OctetBuffer_free(),
described in the online documentation (select Modules, DDS API Reference, Infra-
structure Module, Octet Buffer Support).
To manipulate the memory of the key field in the KeyedOctets struct in C/C++: use
DDS::String_alloc(), DDS::String_dup(), and DDS::String_free(), described in the
online documentation (select Modules, DDS API Reference, Infrastructure Module,
String Support).
3.2.7.2 Keyed Octets DataWriter
In addition to the standard methods (see Using a Type-Specific DataWriter (Foo-
DataWriter) (Section 6.3.6)), the keyed octets DataWriter API is extended with the fol-
lowing methods:
DDS::ReturnCode_t DDS::KeyedOctetsDataWriter::dispose(
const char* key,
const DDS::InstanceHandle_t & instance_handle);
DDS::ReturnCode_t DDS::KeyedOctetsDataWriter::dispose_w_timestamp(
const char* key,
const DDS::InstanceHandle_t & instance_handle,
const DDS::Time_t & source_timestamp);
DDS::ReturnCode_t DDS::KeyedOctetsDataWriter::get_key_value(
char * key,
const DDS::InstanceHandle_t& handle);
DDS::InstanceHandle_t DDS::KeyedOctetsDataWriter::lookup_instance(
const char * key);
DDS::InstanceHandle_t DDS::KeyedOctetsDataWriter::register_instance(
const char* key);
DDS::InstanceHandle_t
DDS::KeyedOctetsDataWriter::register_instance_w_timestamp(
const char * key,
const DDS::Time_t & source_timestamp);

Chapter 3
3-38
DDS::ReturnCode_t DDS::KeyedOctetsDataWriter::unregister_instance(
const char * key,
const DDS::InstanceHandle_t & handle);
DDS::ReturnCode_t
DDS::KeyedOctetsDataWriter::unregister_instance_w_timestamp(
const char* key,
const DDS::InstanceHandle_t & handle,
const DDS::Time_t & source_timestamp);
DDS::ReturnCode_t DDS::KeyedOctetsDataWriter::write(
const char * key,
const unsigned char * octets,
int length,
const DDS::InstanceHandle_t& handle);
DDS::ReturnCode_t DDS::KeyedOctetsDataWriter::write(
const char * key,
const DDS::OctetSeq & octets,
const DDS::InstanceHandle_t & handle);
DDS::ReturnCode_t DDS::KeyedOctetsDataWriter::write_w_timestamp(
const char * key,
const unsigned char * octets,
int length,
const DDS::InstanceHandle_t& handle,
const DDS::Time_t& source_timestamp);
DDS::ReturnCode_t DDS::KeyedOctetsDataWriter::write_w_timestamp(
const char * key,
const DDS::OctetSeq & octets,
const DDS::InstanceHandle_t & handle,
const DDS::Time_t & source_timestamp);
These methods are introduced to provide maximum flexibility in the format of the input
parameters for the write and instance management operations. For more information
and a complete description of these operations in all supported languages, see the
online documentation.
The following examples show how to write keyed octets using a keyed octets built-in
type DataWriter and some of the extended APIs. For simplicity, error handling is not
shown.

3.2 Built-in Data Types
3-39
3. User Data Types
C Example:
DDS_KeyedOctetsDataWriter * octetsWriter = ... ;
DDS_ReturnCode_t retCode;
struct DDS_KeyedOctets * octets = NULL;
char * octetArray = NULL;
/* Write some data using the KeyedOctets structure */
octets = DDS_KeyedOctets_new(128,1024);
strcpy(octets->key, "Key 1");
octets->length = 2;
octets->value[0] = 46;
octets->value[1] = 47;
retCode = DDS_KeyedOctetsDataWriter_write(
octetsWriter, octets, &DDS_HANDLE_NIL);
DDS_KeyedOctets_delete(octets);
/* Write some data using an octets array */
octetArray = (unsigned char *)malloc(1024);
octetArray[0] = 46;
octetArray[1] = 47;
retCode = DDS_KeyedOctetsDataWriter_write_octets_w_key (
octetsWriter, "Key 1", octetArray, 2, &DDS_HANDLE_NIL);
free(octetArray);
C++ Example with Namespaces:
#include "ndds/ndds_namespace_cpp.h"
using namespace DDS;
...
KeyedOctetsDataWriter * octetsWriter = ... ;
/* Write some data using the KeyedOctets structure */
KeyedOctets * octets = new KeyedOctets(128,1024);
strcpy(octets->key, "Key 1");
octets->length = 2;
octets->value[0] = 46;
octets->value[1] = 47;
ReturnCode_t retCode = octetsWriter->write(octets, HANDLE_NIL);

Chapter 3
3-40
delete octets;
/* Write some data using an octet array */
unsigned char * octetArray = new unsigned char[1024];
octetArray[0] = 46;
octetArray[1] = 47;
retCode = octetsWriter->write("Key 1", octetArray, 2, HANDLE_NIL);
delete []octetArray;
C++/CLI Example:
using namespace System;
using namespace DDS;
...
KeyedOctetsDataWriter^ octetsWriter = ... ;
/* Write some data using KeyedBytes */
KeyedBytes^ octets = gcnew KeyedBytes(1024);
octets->key = "Key 1";
octets->value[0] =46;
octets->value[1] =47;
octets.length = 2;
octets.offset = 0;
octetWriter->write(octets, InstanceHandle_t::HANDLE_NIL);
/* Write some data using individual strings */
array<Byte>^ octetAray = gcnew array<Byte>(1024);
octetArray[0] = 46;
octetArray[1] = 47;
octetsWriter->write(
"Key 1", octetArray, 0, 2, InstanceHandle_t::HANDLE_NIL);
C# Example:
using System;
using DDS;
...
KeyedBytesDataWriter stringWriter = ... ;
/* Write some data using the KeyedBytes */

3.2 Built-in Data Types
3-41
3. User Data Types
KeyedBytes octets = new KeyedBytes(1024);
octets.key = "Key 1";
octets.value[0] = 46;
octets.value[1] = 47;
octets.length = 2;
octets.offset = 0;
octetWriter.write(octets, InstanceHandle_t.HANDLE_NIL);
/* Write some data using individual strings */
byte[] octetArray = new byte[1024];
octetArray[0] = 46;
octetArray[1] = 47;
octetsWriter.write(
"Key 1", octetArray, 0, 2, InstanceHandle_t.HANDLE_NIL);
Java Example:
import com.rti.dds.publication.*;
import com.rti.dds.type.builtin.*;
import com.rti.dds.infrastructure.*;
...
KeyedBytesDataWriter octetsWriter = ... ;
/* Write some data using the KeyedBytes class*/
KeyedBytes octets = new KeyedBytes(1024);
octets.key = "Key 1";
octets.length = 2;
octets.offset = 0;
octets.value[0] = 46;
octets.value[1] = 47;
octetsWriter.write(octets, InstanceHandle_t.HANDLE_NIL);
/* Write some data using a byte array */
byte[] octetArray = new byte[1024];
octetArray[0] = 46;
octetArray[1] = 47;
octetsWriter.write(
"Key 1", octetArray, 0, 2, InstanceHandle_t.HANDLE_NIL);

Chapter 3
3-42
3.2.7.3 Keyed Octets DataReader
The KeyedOctets DataReader API is extended with the following methods (in addition to
the standard methods described in Using a Type-Specific DataReader (FooDataReader)
(Section 7.4.1)):
DDS::ReturnCode_t DDS::KeyedOctetsDataReader::get_key_value(
char * key,
const DDS::InstanceHandle_t* handle);
DDS::InstanceHandle_t
DDS::KeyedOctetsDataReader::lookup_instance(
const char * key);
For more information and a complete description of these operations in all supported
languages, see the online documentation.
Memory considerations in copy operations:
For read/take operations with copy semantics, such as read_next_sample() and
take_next_sample(), RTI Data Distribution Service allocates memory for the fields
'value' and 'key' if they are initialized to NULL.
If the fields are not initialized to NULL, the behavior depends on the language:
• In Java and .NET, the memory of the field 'value' will be reallocated if the
current size is not large enough to hold the received data. The memory
associated with the field 'key' will be reallocated with every sample (the
key is an immutable object).
• In C and C++, the memory associated with the fields 'value' and 'key'
must be large enough to hold the received data. Insufficient memory may
result in crashes.
The following examples show how to read keyed octets with a keyed octets built-in type
DataReader. For simplicity, error handling is not shown.
C Example:
struct DDS_KeyedOctetsSeq dataSeq = DDS_SEQUENCE_INITIALIZER;
struct DDS_SampleInfoSeq infoSeq = DDS_SEQUENCE_INITIALIZER;
DDS_KeyedOctetsDataReader * octetsReader = ... ;
DDS_ReturnCode_t retCode;
int i;
/* Take and print the data */
retCode = DDS_KeyedOctetsDataReader_take(
octetsReader,
&dataSeq, &infoSeq, DDS_LENGTH_UNLIMITED,

3.2 Built-in Data Types
3-43
3. User Data Types
DDS_ANY_SAMPLE_STATE, DDS_ANY_VIEW_STATE,
DDS_ANY_INSTANCE_STATE);
for (i = 0; i < DDS_KeyedOctetsSeq_get_length(&data_seq); ++i) {
if (DDS_SampleInfoSeq_get_reference(&info_seq, i)->valid_data) {
DDS_KeyedOctetsTypeSupport_print_data(
DDS_KeyedOctetsSeq_get_reference(&data_seq, i));
}
}
/* Return loan */
retCode = DDS_KeyedOctetsDataReader_return_loan(
octetsReader, &data_seq, &info_seq);
C++ Example with Namespaces:
#include "ndds/ndds_namespace_cpp.h"
using namespace DDS;
...
KeyedOctetsSeq dataSeq;
SampleInfoSeq infoSeq;
KeyedOctetsDataReader * octetsReader = ... ;
/* Take a print the data */
ReturnCode_t retCode = octetsReader->take(
dataSeq, infoSeq, LENGTH_UNLIMITED,
ANY_SAMPLE_STATE, ANY_VIEW_STATE, ANY_INSTANCE_STATE);
for (int i = 0; i < data_seq.length(); ++i) {
if (infoSeq[i].valid_data) {
KeyedOctetsTypeSupport::print_data(&dataSeq[i]);
}
}
/* Return loan */
retCode = octetsReader->return_loan(dataSeq, infoSeq);
C++/CLI Example:
using namespace System;
using namespace DDS;
...
KeyedBytesSeq^ dataSeq = gcnew KeyedBytesSeq();
SampleInfoSeq^ infoSeq = gcnew SampleInfoSeq();
KeyedBytesDataReader^ octetsReader = ... ;

Chapter 3
3-44
/* Take and print the data */
octetsReader->take(dataSeq, infoSeq,
ResourceLimitsQosPolicy::LENGTH_UNLIMITED,
SampleStateKind::ANY_SAMPLE_STATE,
ViewStateKind::ANY_VIEW_STATE,
InstanceStateKind::ANY_INSTANCE_STATE);
for (int i = 0; i < data_seq.length(); ++i) {
if (infoSeq->get_at(i)->valid_data) {
KeyedBytesTypeSupport::print_data(dataSeq->get_at(i));
}
}
/* Return loan */
octetsReader->return_loan(dataSeq, infoSeq);
C# Example:
using System;
using DDS;
...
KeyedBytesSeq dataSeq = new KeyedButesSeq();
SampleInfoSeq infoSeq = new SampleInfoSeq();
KeyedBytesDataReader octetsReader = ... ;
/* Take and print the data */
octetsReader.take(dataSeq, infoSeq,
ResourceLimitsQosPolicy.LENGTH_UNLIMITED,
SampleStateKind.ANY_SAMPLE_STATE,
ViewStateKind.ANY_VIEW_STATE,
InstanceStateKind.ANY_INSTANCE_STATE);
for (int i = 0; i < data_seq.length(); ++i) {
if (infoSeq.get_at(i)).valid_data) {
KeyedBytesTypeSupport.print_data(dataSeq.get_at(i));
}
}
/* Return loan */
octetsReader.return_loan(dataSeq, infoSeq);
Java Example:
import com.rti.dds.infrastructure.*;
import com.rti.dds.subscription.*;
import com.rti.dds.type.builtin.*;
...
3.2 Built-in Data Types
3-45
3. User Data Types
KeyedBytesSeq dataSeq = new KeyedBytesSeq();
SampleInfoSeq infoSeq = new SampleInfoSeq();
KeyedBytesDataReader octetsReader = ... ;
/* Take and print the data */
octetsReader.take(dataSeq, infoSeq,
ResourceLimitsQosPolicy.LENGTH_UNLIMITED,
SampleStateKind.ANY_SAMPLE_STATE,
ViewStateKind.ANY_VIEW_STATE,
InstanceStateKind.ANY_INSTANCE_STATE);
for (int i = 0; i < data_seq.length(); ++i) {
if (((SampleInfo)infoSeq.get(i)).valid_data) {
System.out.println(((KeyedBytes)dataSeq.get(i)).toString());
}
}
/* Return loan */
octetsReader.return_loan(dataSeq, infoSeq);
3.2.8 Managing Memory for Built-in Types
When a sample is written, the DataWriter serializes it and stores the result in a buffer
obtained from a pool of preallocated buffers. In the same way, when a sample is
received, the DataReader deserializes it and stores the result in a sample coming from a
pool of preallocated samples.
For data types generated by rtiddsgen, the size of the buffers and samples in both pools
is known based on the IDL or XML description of the type.
For example:
struct MyString {
string<128> value;
};
This IDL-defined type has a maximum serialized size of 133 bytes (4 bytes for length +
128 characters + 1 NULL terminating character). So the serialization buffers will have a
size of 133 bytes. It can hold samples with 128 characters strings. Consequently, the pre-
allocated samples will be sized to keep this length.
However, for built-in types, the maximum size of the buffers/samples is unknown and
depends on the nature of the application using the built-in type.

Chapter 3
3-46
For example, a video surveillance application that is using the keyed octets built-in type
to publish a stream of images will require bigger buffers than a market-data application
that uses the same built-in type to publish market-data values.
To accommodate both kinds of applications and optimize memory usage, you can con-
figure the maximum size of the built-in types on a per-DataWriter or per-Datareader basis
using the PROPERTY QosPolicy (DDS Extension) (Section 6.5.15). Table 3.1 on page 3-47
lists the supported built-in type properties. When the properties are defined in the
DomainParticipant, they are applicable to all DataWriters and DataReaders belonging to
the DomainParticipant, unless they are overwritten in the DataWriters and DataReaders.
Note: These properties must be set consistently with respect to the corresponding
*.max_size properties in the DomainParticipant (see Table 3.13 on page 3-126). The value
of the alloc_size property must be less than or equal to the max_size property with the
same name prefix in the DomainParticipant.
Section 3.2.8.1 includes examples of how to set the maximum size of a string built-in
type for a DataWriter programmatically, for each API. You can also set the maximum
size of the built-in types using XML QoS Profiles. For example, the following XML
shows how to set the maximum size of a string built-in type for a DataWriter.
<dds>
<qos_library name="BuiltinExampleLibrary">
<qos_profile name="BuiltinExampleProfile">
<datawriter_qos>
<property>
<value>
<element>
<name>dds.builtin_type.string.alloc_size</name>
<value>2048</value>
</element>
</value>
</property>
</datawriter_qos>
<datareader_qos>
<property>
<value>
<element>
<name>dds.builtin_type.string.alloc_size</name>
<value>2048</value>
</element>
</value>
</property>
</datareader_qos>
</qos_profile>

3.2 Built-in Data Types
3-47
3. User Data Types
</qos_library>
</dds>
Table 3.1 Properties for Allocating Size of Built-in Types, per DataWriter and DataReader
Built-in
Type
Property Description
string dds.builtin_type.string.alloc_size
Maximum size of the strings published by the
DataWriter or received by the DataReader (includes
the NULL-terminated character).
Default: dds.builtin_type.string.max_size if defined
(see Table 3.13 on page 3-126). Otherwise, 1024.
keyed-
string
dds.builtin_type.keyed_string.
alloc_key_size
Maximum size of the keys used by the DataWriter or
DataReader (includes the NULL-terminated charac-
ter).
Default: dds.builtin_type.keyed_string.max_key_size
if defined (see Table 3.13 on page 3-126). Otherwise,
1024.
dds.builtin_type.keyed_string.
alloc_size
Maximum size of the strings published by the
DataWriter or received by the DataReader (includes
the NULL-terminated character).
Default: dds.builtin_type.keyed_string.max_size if
defined (see Table 3.13 on page 3-126). Otherwise,
1024.
octets dds.builtin_type.octets.alloc_size
Maximum size of the octet sequences published by
the DataWriter or DataReader.
Default: dds.builtin_type.octets.max_size if defined
(see Table 3.13 on page 3-126). Otherwise, 2048.
keyed-
octets
dds.builtin_type.keyed_octets.
alloc_key_size
Maximum size of the key published by the
DataWriter or received by the DataReader (includes
the NULL-terminated character).
Default: dds.builtin_type.keyed_octets.max_key_size
if defined (see Table 3.13 on page 3-126). Otherwise,
1024.
dds.builtin_type.keyed_octets.
alloc_size
Maximum size of the octet sequences published by
the DataWriter or DataReader.
Default: dds.builtin_type.keyed_octets.max_size if
defined (see Table 3.13 on page 3-126). Otherwise,
2048.

Chapter 3
3-48
3.2.8.1 Examples—Setting the Maximum Size for a String Programmatically
For simplicity, error handling is not shown in the following examples.
C Example:
DDS_DataWriter * writer = NULL;
DDS_StringDataWriter * stringWriter = NULL;
DDS_Publisher * publisher = ... ;
DDS_Topic * stringTopic = ... ;
struct DDS_DataWriterQos writerQos = DDS_DataWriterQos_INITIALIZER;
DDS_ReturnCode_t retCode;
retCode = DDS_DomainParticipant_get_default_datawriter_qos (
participant, &writerQos);
retCode = DDS_PropertyQosPolicyHelper_add_property (
&writerQos.property,
"dds.builtin_type.string.alloc_size", "1000",
DDS_BOOLEAN_FALSE);
writer = DDS_Publisher_create_datawriter(
publisher, stringTopic, &writerQos,
NULL, DDS_STATUS_MASK_NONE);
stringWriter = DDS_StringDataWriter_narrow(writer);
DDS_DataWriterQos_finalize(&writerQos);

3.2 Built-in Data Types
3-49
3. User Data Types
C++ Example with Namespaces:
#include "ndds/ndds_namespace_cpp.h"
using namespace DDS;
...
Publisher * publisher = ... ;
Topic * stringTopic = ... ;
DataWriterQos writerQos;
ReturnCode_t retCode =
participant->get_default_datawriter_qos(writerQos);
retCode = PropertyQosPolicyHelper::add_property (
&writerQos.property,
"dds.builtin_type.string.alloc_size", "1000",
BOOLEAN_FALSE);
DataWriter * writer = publisher->create_datawriter(
stringTopic, writerQos,
NULL, STATUS_MASK_NONE);
StringDataWriter * stringWriter = StringDataWriter::narrow(writer);
C++/CLI Example:
using namespace DDS;
...
Topic^ stringTopic = ... ;
Publisher^ publisher = ... ;
DataWriterQos^ writerQos = gcnew DataWriterQos();
participant->get_default_datawriter_qos(writerQos);
PropertyQosPolicyHelper::add_property(
writerQos->property_qos,
"dds.builtin_type.string.alloc_size", "1000",
false);
DataWriter^ writer = publisher->create_datawriter(
stringTopic, writerQos,
nullptr, StatusMask::STATUS_MASK_NONE);
StringDataWriter^ stringWriter =
safe_cast<StringDataWriter^>(writer);

Chapter 3
3-50
C# Example:
using DDS;
...
Topic stringTopic = ... ;
Publisher publisher = ... ;
DataWriterQos writerQos = new DataWriterQos();
participant.get_default_datawriter_qos(writerQos);
PropertyQosPolicyHelper.add_property (
writerQos.property_qos,
"dds.builtin_type.string.alloc_size", "1000",
false);
StringDataWriter stringWriter =
(StringDataWriter) publisher.create_datawriter(
stringTopic, writerQos, null,
StatusMask.STATUS_MASK_NONE);
Java Example:
import com.rti.dds.publication.*;
import com.rti.dds.type.builtin.*;
import com.rti.dds.infrastructure.*;
...
Topic stringTopic = ... ;
Publisher publisher = ... ;
DataWriterQos writerQos = new DataWriterQos();
participant.get_default_datawriter_qos(writerQos);
PropertyQosPolicyHelper.add_property (
writerQos.property,
"dds.builtin_type.string.alloc_size", "1000",
false);
StringDataWriter stringWriter =
(StringDataWriter) publisher.create_datawriter(
stringTopic, writerQos,
null, StatusKind.STATUS_MASK_NONE);

3.2 Built-in Data Types
3-51
3. User Data Types
3.2.9 Type Codes for Built-in Types
The type codes associated with the built-in types are generated from the following IDL
type definitions:
module DDS {
/* String */
struct String {
string<max_size> value;
};
/* KeyedString */
struct KeyedString {
string<max_size> key; //@key
string<max_size> value;
};
/* Octets */
struct Octets {
sequence<octet, max_size> value;
};
/* KeyedOctets */
struct KeyedOctets {
string<max_size> key; //@key
sequence<octet, max_size> value;
};
};
The maximum size (max_size) of the strings and sequences that will be included in the
type code definitions can be configured on a per-DomainParticipant-basis by using the
properties in Table 3.2.
Table 3.2 Properties for Allocating Size of Built-in Types, per DomainParticipant
Built-in
Type
Property Description
String
dds.builtin_type.string.max_size
Maximum size of the strings published by the DataWriters
and received by the DataReaders belonging to a DomainPar-
ticipant (includes the NULL-terminated character).
Default: 1024

Chapter 3
3-52
3.3 Creating User Data Types with IDL
You can create user data types in a text file using IDL (Interface Description Language).
IDL is programming-language independent, so the same file can be used to generate
code in C, C++, C++/CLI, and Java (the languages supported by rtiddsgen). The rtidds-
gen utility parses the IDL file and automatically generates all the necessary routines and
wrapper functions to bind the types for use by RTI Data Distribution Service at run time.
Keyed-
String
dds.builtin_type.keyed_string.
max_key_size
Maximum size of the keys used by the DataWriters and
DataReaders belonging to a DomainParticipant (includes the
NULL-terminated character).
Default: 1024
dds.builtin_type.keyed_string.
max_size
Maximum size of the strings published by the DataWriters
and received by the DataReaders belonging to a DomainPar-
ticipant using the built-in type (includes the NULL-termi-
nated character).
Default: 1024
Octets
dds.builtin_type.octets.max_size
Maximum size of the octet sequences published by the
DataWriters and DataReaders belonging to a DomainPartici-
pant.
Default: 2048
Keyed-
Octets
dds.builtin_type.keyed_octets.
max_key_size
Maximum size of the key published by the DataWriter and
received by the DataReaders belonging to the
DomainParticipant (includes the NULL-terminated charac-
ter).
Default:1024.
dds.builtin_type.keyed_octets.
max_size
Maximum size of the octet sequences published by the
DataWriters and DataReaders belonging to a DomainPartici-
pant.
Default: 2048
Table 3.2
Properties for Allocating Size of Built-in Types, per DomainParticipant
Built-in
Type
Property Description

3.3 Creating User Data Types with IDL
3-53
3. User Data Types
You will end up with a set of required routines and structures that your application and
RTI Data Distribution Service will use to manipulate the data.
DDS only uses a subset of the IDL syntax. IDL was originally defined by the OMG for
the use of CORBA client/server applications in an enterprise setting. Not all of the con-
structs that can be described by the language are as useful in the context of high-perfor-
mance data-centric embedded applications. These include the constructs that define
method and function prototypes like “interface.”
The rtiddsgen utility will parse any file that follows version 3.0.3 of the IDL specification.
It will quietly ignore all syntax that is not recognized by DDS. In addition, even though
“anonymous sequences” (sequences of sequences with no intervening typedef) are cur-
rently legal in IDL, they have been deprecated by the specification, and thus rtiddsgen
does not support them.
The IDL constructs supported by rtiddsgen are described in Table 3.4, “Specifying Data
Types in IDL for C and C++,” on page 3-57 and Table 3.6, “Specifying Data Types in IDL
for Java,” on page 3-66. Use these tables to map primitive types to their equivalent IDL
syntax, and vice versa.
For C and C++, rtiddsgen uses typedefs instead of the language keywords for primitive
types. For example, DDS_Long instead of long or DDS_Double instead of double.
This ensures that the types are of the same size regardless of the platform.
1
The remainder of this section includes:
❏ Variable-Length Types (Section 3.3.1)
❏ Value Types (Section 3.3.2)
❏ rtiddsgen Translations for IDL Types (Section 3.3.4)
❏ Referring to Other IDL Files (Section 3.3.6)
❏ Preprocessor Directives (Section 3.3.7)
❏ Using Custom Directives (Section 3.3.8)
3.3.1 Variable-Length Types
When rtiddsgen generates code for data structures with variable-length types—strings
and sequences—it includes functions that create, initialize and finalize (destroy) those
1. The number of bytes sent on the wire for each data type is determined by the Common Data Represen-
tation (CDR) standard. For details on CDR, please see the Common Object Request Broker Architecture
(CORBA) Specification, Version 3.1, Part 2: CORBA Interoperability, Section 9.3, CDR Transfer Syntax (http://
www.omg.org/technology/documents/corba_spec_catalog.htm).

Chapter 3
3-54
objects. These support functions will properly initialize pointers and allocate and deal-
locate the memory used for variable-length types. All RTI Data Distribution Service APIs
assume that the data structures passed to them are properly initialized.
For variable-length types, the actual length (instead of the maximum length) of data is
transmitted on the wire when the sample is written (regardless of whether the type has
hard-coded bounds).
3.3.1.1 Sequences
C, C++, C++/CLI, and C# users can allocate memory from a number of sources: from
the heap, the stack, or from a custom allocator of some kind. In those languages,
sequences provide the concept of memory "ownership." A sequence may own the mem-
ory allocated to it or be loaned memory from another source. If a sequence owns its
memory, it will manage its underlying memory storage buffer itself. When a sequence's
maximum size is changed, the sequence will free and reallocate its buffer as needed.
However, if a sequence was created with loaned memory by user code, then its memory
is not its own to free or reallocate. Therefore, you cannot set the maximum size of a
sequence whose memory is loaned. See the online API documentation on Sequence Sup-
port in the Infrastructure Module for more information about how to loan and unloan
memory for sequence.
In IDL, as described above, a sequence may be declared as bounded or unbounded. A
sequence's "bound" is the greatest value its maximum may take. If you use the initializer
functions rtiddsgen provides for your types, all sequences will have their maximums set
to their declared bounds. However, the amount of data transmitted on the wire when
the sample is written will vary.
3.3.1.2 Strings and Wide Strings
The initialization functions that rtiddsgen provides for your types will allocate all of the
memory for strings in a type to their declared bounds. Take care—if you assign a string
pointer (char *) in a data structure allocated or initialized by an RTI Data Distribution
Service-generated function, you should release (free) the memory originally allocated for
the string, otherwise the memory will be leaked.
To Java and .NET users, an IDL string is a String object: it is immutable and knows its
own length. C and C++ users must take care, however, as there is no way to determine
how much memory is allocated to a character pointer "string"; all that can be deter-
mined is the string's current logical length. In some cases, RTI Data Distribution Service
may need to copy a string into a structure that user code has provided. RTI Data Distri-
bution Service does not free the memory of the string provided to it, as it cannot know
from where that memory was allocated.

3.3 Creating User Data Types with IDL
3-55
3. User Data Types
In the C and C++ APIs, RTI Data Distribution Service therefore uses the following con-
ventions:
❏ A string's memory is "owned" by the structure that contains that string. Calling
the finalization function provided for a type will free all recursively contained
strings. If you have allocated a contained string in a special way, you must be
careful to clean up your own memory and assign the pointer to NULL before call-
ing the type’s finalize() method, so that RTI Data Distribution Service will skip
over that string.
❏ You must provide a non-NULL string pointer for RTI Data Distribution Service to
copy into. Otherwise, RTI Data Distribution Service will log an error.
❏ When you provide a non-NULL string pointer in your data structure, RTI Data
Distribution Service will copy into the provided memory without performing any
additional memory allocations. Be careful—if you provide RTI Data Distribution
Service with an uninitialized pointer or allocate a string that is too short, you may
corrupt the memory or cause a program crash. RTI Data Distribution Service will
never try to copy a string that is longer than the bound of the destination string.
However, your application must insure that any string that it allocates is long
enough.
RTI Data Distribution Service provides a small set of C functions for dealing with strings.
These functions simplify common tasks, avoid some platform-specific issues (such as
the lack of a strdup() function on some platforms), and provide facilities for dealing
with wide strings, for which no standard C library exists. RTI Data Distribution Service
always uses these functions internally for managing string memory; you are recom-
mended—but not required—to use them as well. See the online API documentation on
String Support in the Infrastructure Module for more information about strings.
3.3.2 Value Types
A value type is like a structure, but with support for additional object-oriented features
such as inheritance. It is similar to what is sometimes referred to in Java as a POJO—a
Plain Old Java Object.
Readers familiar with value types in the context of CORBA should consult Table 3.3 to
see which value type-related IDL keywords are supported and what their behavior is in
the context of RTI Data Distribution Service.

Chapter 3
3-56
3.3.3 TypeCode and rtiddsgen
Type codes are enabled by default when you run rtiddsgen. The -notypecode option dis-
ables generation of type code information. Type-code support does increase the amount
of memory used, so if you need to save on memory, you may consider disabling type
codes. (The -notypecode option is described in rtiddsgen Command-Line Arguments
(Section 3.6.1)
Locally, your application can access the type code for a generated type "Foo" by calling
the Foo::get_typecode() operation in the code for the type generated by rtiddsgen (unless
type-code support is disabled with the -notypecode option).
Note: Type-code support must be enabled if you are going to use ContentFilteredTopics
(Section 5.4) with the default SQL filter. You may disable type codes and use a custom
filter, as described in Creating ContentFilteredTopics (Section 5.4.3).
3.3.4 rtiddsgen Translations for IDL Types
This section describes how to specify your data types in an IDL file. The rtiddsgen utility
supports all the types listed in the following tables:
❏ Table 3.4, “Specifying Data Types in IDL for C and C++,” on page 3-57
❏ Table 3.5, “Specifying Data Types in IDL for C++/CLI,” on page 3-63
❏ Table 3.6, “Specifying Data Types in IDL for Java,” on page 3-66
Table 3.3 Value Type Support
Aspect Level of Support in rtiddsgen
Inheritance Single inheritance from other value types
Public state members Supported
Private state members Become public when code is generated
Custom keyword
Ignored (the value type is parsed without the keyword and code is
generated to work with it)
Abstract value types
No code generated (the value type is parsed, but no code is gener-
ated)
Operations
No code generated (the value type is parsed, but no code is gener-
ated)
Truncatable keyword
Ignored (the value type is parsed without the keyword and code is
generated to work with it)

3.3 Creating User Data Types with IDL
3-57
3. User Data Types
In each table, the middle column shows the syntax for an IDL data type in the IDL file.
The rightmost column shows the corresponding language mapping created by rtidds-
gen.
Table 3.4 Specifying Data Types in IDL for C and C++
IDL Type Sample Entry in IDL File Sample Output Generated by rtiddsgen
char
(see Note 1
below)
struct PrimitiveStruct {
char char_member;
};
typedef struct PrimitiveStruct
{
DDS_Char char_member;
} PrimitiveStruct;
wchar
struct PrimitiveStruct {
wchar wchar_member;
};
typedef struct PrimitiveStruct
{
DDS_Wchar wchar_member;
} PrimitiveStruct;
octet
struct PrimitiveStruct {
octet octet_member;
};
typedef struct PrimitiveStruct
{
DDS_Octet boolean_member;
} PrimitiveStruct;
short
struct PrimitiveStruct {
short short_member;
};
typedef struct PrimitiveStruct
{
DDS_Short short_member;
} PrimitiveStruct;
unsigned
short
struct PrimitiveStruct {
unsigned short
unsigned_short_member;
};
typedef struct PrimitiveStruct
{
DDS_UnsignedShort
unsigned_short_member;
} PrimitiveStruct;
long
struct PrimitiveStruct {
long long_member;
};
typedef struct PrimitiveStruct
{
DDS_Long long_member;
} PrimitiveStruct;
unsigned
long
struct PrimitiveStruct {
unsigned long
unsigned_long_member;
};
typedef struct PrimitiveStruct
{
DDS_UnsignedLong
unsigned_long_member;
} PrimitiveStruct;
long long
struct PrimitiveStruct {
long long long_long_member;
};
typedef struct PrimitiveStruct
{
DDS_LongLong long_long_member;
} PrimitiveStruct;

Chapter 3
3-58
unsigned
long long
struct PrimitiveStruct {
unsigned long long
unsigned_long_long_member;
};
typedef struct PrimitiveStruct
{
DDS_UnsignedLongLong
unsigned_long_long_member;
} PrimitiveStruct;
float
struct PrimitiveStruct {
float float_member;
};
typedef struct PrimitiveStruct
{
DDS_Float float_member;
} PrimitiveStruct;
double
struct PrimitiveStruct {
double double_member;
};
typedef struct PrimitiveStruct
{
DDS_Double double_member;
} PrimitiveStruct;
long double
(see Note 2
below)
struct PrimitiveStruct {
long double long_double_member;
};
typedef struct PrimitiveStruct
{
DDS_LongDouble long_double_member;
} PrimitiveStruct;
pointer
(see Note 9
below)
struct MyStruct {
long * member;
};
typedef struct MyStruct {
DDS_Long * member;
} MyStruct;
boolean
struct PrimitiveStruct {
boolean boolean_member;
};
typedef struct PrimitiveStruct
{
DDS_Boolean boolean_member;
} PrimitiveStruct;
enum
enum PrimitiveEnum {
ENUM1,
ENUM2,
ENUM3
};
enum PrimitiveEnum {
ENUM1 = 10,
ENUM2 = 20,
ENUM3 = 30
};
typedef enum PrimitiveEnum
{
ENUM1,
ENUM2,
ENUM3
} PrimitiveEnum;
typedef enum PrimitiveEnum
{
ENUM1 = 10,
ENUM2 = 20,
ENUM3 = 30
} PrimitiveEnum;
constant const short SIZE = 5;
C: #define SIZE 5
C++: static const DDS_Short size = 5;
Table 3.4
Specifying Data Types in IDL for C and C++
IDL Type Sample Entry in IDL File Sample Output Generated by rtiddsgen

3.3 Creating User Data Types with IDL
3-59
3. User Data Types
bitfield
(see Note 12
below)
struct BitfieldType {
short myShort_1 : 1;
unsigned short myUnsignedShort_1:
1;
long myLong_1: 1;
unsigned long myUnsignedLong_1 :1;
char myChar_1 : 1;
wchar myWChar_1 : 1;
octet myOctet_1 : 1;
short : 0;
long myLong_5 : 5;
long myLong_30 : 30;
short myShort_6 : 6;
short myShort_3and4 : 3+4;
short myShort;
short myShort_8 : 8;
long myLong_32: 32;
};
typedef struct BitfieldType
{
DDS_Short myShort_1 : 1;
DDS_UnsignedShort myUnsignedShort_1
: 1;
DDS_Long myLong_1 : 1;
DDS_UnsignedLong myUnsignedLong_1 :
1;
DDS_Char myChar_1 : 1;
DDS_Wchar myWChar_1 : 1;
DDS_Octet myOctet_1 : 1;
DDS_Short : 0;
DDS_Long myLong_5 : 5;
DDS_Long myLong_30 : 30;
DDS_Short myShort_6 : 6;
DDS_Short myShort_3and4 : 3+4;
DDS_Short myShort;
DDS_Short myShort_8 : 8;
DDS_Long myLong_32 : 32;
} BitfieldType;
struct
(see Note 10
below)
struct PrimitiveStruct {
char char_member;
};
typedef struct PrimitiveStruct
{
char char_member;
} PrimitiveStruct;
union
(see Note 3
and Note 10
below)
union PrimitiveUnion switch (long){
case 1:
short short_member;
default:
long long_member;
};
typedef struct PrimitiveUnion
{
DDS_Long _d;
struct {
DDS_Short short_member;
DDS_Long long_member;
} _u;
} PrimitiveUnion;
typedef typedef short TypedefShort; typedef DDS_Short TypedefShort;
array of
above types
struct OneDArrayStruct {
short short_array[2];
};
struct TwoDArrayStruct {
short short_array[1][2];
};
typedef struct OneDArrayStruct
{
DDS_Short short_array[2];
} OneDArrayStruct;
typedef struct TwoDArrayStruct
{
DDS_Short short_array[1][2];
} TwoDArrayStruct;
Table 3.4
Specifying Data Types in IDL for C and C++
IDL Type Sample Entry in IDL File Sample Output Generated by rtiddsgen

Chapter 3
3-60
bounded
sequence of
above types
(see Note 11
below)
struct SequenceStruct {
sequence<short,4> short_sequence;
};
typedef struct SequenceStruct
{
DDSShortSeq short_sequence;
} SequenceStruct;
Note: Sequences of primitive types have been
predefined by RTI Data Distribution Service.
unbounded
sequence of
above types
(see Note 11
below)
struct SequenceStruct {
sequence<short> short_sequence;
};
typedef struct SequenceStruct
{
DDSShortSeq short_sequence;
} SequenceStruct;
Note: rtiddsgen will supply a default bound.
You can specify that bound with the “-sequenc-
eSize” command-line option; see Section 3.6.1.
array of
sequences
struct ArraysOfSequences{
sequence<short,4>
sequences_array[2];
};
typedef struct ArraysOfSequences
{
DDS_ShortSeq sequences_array[2];
} ArraysOfSequences;
sequence of
arrays
(see Note 11
below)
typedef short ShortArray[2];
struct SequenceofArrays {
sequence<ShortArray,2>
arrays_sequence;
};
typedef DDS_Short ShortArray[2];
DDS_SEQUENCE_NO_GET(ShortArraySeq,
ShortArray);
typedef struct SequenceOfArrays
{
ShortArraySeq arrays_sequence;
} SequenceOfArrays;
DDS_SEQUENCE_NO_GET is an RTI Data Dis-
tribution Service macro that defines a new
sequence type for a user data type. In this case,
the user data type is ShortArray.
sequence of
sequences
(see Note 4
and Note 11
below)
typedef sequence<short,4>
ShortSequence;
struct SequencesOfSequences{
sequence<ShortSequence,2>
sequences_sequence;
};
typedef DDS_ShortSeq ShortSequence;
DDS_SEQUENCE(ShortSequenceSeq,
ShortSequence);
typedef struct SequencesOfSequences{
ShortSequenceSeq
sequences_sequence;
} SequencesOfSequences;
Table 3.4
Specifying Data Types in IDL for C and C++
IDL Type Sample Entry in IDL File Sample Output Generated by rtiddsgen

3.3 Creating User Data Types with IDL
3-61
3. User Data Types
bounded
string
struct PrimitiveStruct {
string<20> string_member;
};
typedef struct PrimitiveStruct {
char* string_member;
/* maximum length = (20) */
} PrimitiveStruct;
unbounded
string
struct PrimitiveStruct {
string string_member;
};
typedef struct PrimitiveStruct {
char* string_member;
/* maximum length = (255) */
} PrimitiveStruct;
Note: rtiddsgen will supply a default bound.
You can specify that bound with the -stringSize
command-line option, see Section 3.6.1.
bounded
wstring
struct PrimitiveStruct {
wstring<20> wstring_member;
};
typedef struct PrimitiveStruct {
DDS_Wchar * wstring_member;
/* maximum length = (20)
*/
} PrimitiveStruct;
unbounded
wstring
struct PrimitiveStruct {
wstring wstring_member;
};
typedef struct PrimitiveStruct {
DDS_Wchar * wstring_member;
/* maximum length = (255) */
} PrimitiveStruct;
Note: rtiddsgen will supply a default bound.
module
module PackageName {
struct Foo {
long field;
};
};
With the -namespace option (only available for
C++):
namespace PackageName{
typedef struct Foo {
DDS_Long field;
} Foo;
};
Without the -namespace option:
typedef struct PackageName_Foo {
DDS_Long field;
} PackageName_Foo;
Table 3.4
Specifying Data Types in IDL for C and C++
IDL Type Sample Entry in IDL File Sample Output Generated by rtiddsgen

Chapter 3
3-62
valuetype
(see Note 9
and Note 10
below)
valuetype MyValueType {
public MyValueType2 * member;
};
valuetype MyValueType {
public MyValueType2 member;
};
valuetype MyValueType: MyBaseValueType
{
public MyValueType2 * member;
};
C++: class MyValueType {
public:
MyValueType2 * member;
};
class MyValueType {
public:
MyValueType2 member;
};
class MyValueType : public MyBa-
seValueType
{
public:
MyValueType2 * member;
};
C: typedef struct MyValueType {
MyValueType2 * member;
} MyValueType;
typedef struct MyValueType {
MyValueType2 member;
} MyValueType;
typedef struct MyValueType
{
MyBaseValueType parent;
MyValueType2 * member;
} MyValueType;
Table 3.4
Specifying Data Types in IDL for C and C++
IDL Type Sample Entry in IDL File Sample Output Generated by rtiddsgen

3.3 Creating User Data Types with IDL
3-63
3. User Data Types
Table 3.5 Specifying Data Types in IDL for C++/CLI
IDL Type Sample Entry in IDL File Sample Output Generated by rtiddsgen
char
(see Note 1
below)
struct PrimitiveStruct {
char char_member;
};
public ref class PrimitiveStruct {
System::Char char_member;
};
wchar
struct PrimitiveStruct {
wchar wchar_member;
};
public ref class PrimitiveStruct {
System::Char wchar_member;
};
octet
struct PrimitiveStruct {
octet octet_member;
};
public ref class PrimitiveStruct {
System::Byte octet_member;
};
short
struct PrimitiveStruct {
short short_member;
};
public ref class PrimitiveStruct {
System::Int16 short_member;
};
unsigned
short
struct PrimitiveStruct {
unsigned short
unsigned_short_member;
};
public ref class PrimitiveStruct {
System::UInt16 unsigned_short_member;
};
long
struct PrimitiveStruct {
long long_member;
};
public ref class PrimitiveStruct {
System::Int32 long_member;
};
unsigned
long
struct PrimitiveStruct {
unsigned long unsigned_long_member;
};
public ref class PrimitiveStruct {
System::UInt32 unsigned_long_member;
};
long long
struct PrimitiveStruct {
long long long_long_member;
};
public ref class PrimitiveStruct {
System::Int64 long_long_member;
};
unsigned
long long
struct PrimitiveStruct {
unsigned long long
unsigned_long_long_member;
};
public ref class PrimitiveStruct {
System::UInt64
unsigned_long_long_member;
};
float
struct PrimitiveStruct {
float float_member;
};
public ref class PrimitiveStruct {
System::Single float_member;
};
double
struct PrimitiveStruct {
double double_member;
};
public ref class PrimitiveStruct {
System::Double double_member;
} PrimitiveStruct;
long double
(see Note 2
below)
struct PrimitiveStruct {
long double long_double_member;
};
public ref class PrimitiveStruct {
DDS::LongDouble long_double_member;
} PrimitiveStruct;

Chapter 3
3-64
boolean
struct PrimitiveStruct {
boolean boolean_member;
};
public ref class PrimitiveStruct {
System::Boolean boolean_member;
};
enum
enum PrimitiveEnum {
ENUM1,
ENUM2,
ENUM3
};
enum PrimitiveEnum {
ENUM1 = 10,
ENUM2 = 20,
ENUM3 = 30
};
public enum class
PrimitiveEnum : System::Int32 {
ENUM1,
ENUM2,
ENUM3
};
public enum class
PrimitiveEnum : System::Int32 {
ENUM1 = 10,
ENUM2 = 20,
ENUM3 = 30
};
constant const short SIZE = 5;
public ref class SIZE {
public:
static System::Int16 VALUE = 5;
};
struct
(see Note 10
below)
struct PrimitiveStruct {
char char_member;
};
public ref class PrimitiveStruct {
System::Char char_member;
};
union
(see Note 3
and Note 10
below)
union PrimitiveUnion switch (long){
case 1:
short short_member;
default:
long long_member;
};
public ref class PrimitiveUnion
{
System::Int32 _d;
struct PrimitiveUnion_u {
System::Int16 short_member;
System::Int32 long_member;
} _u;
};
array of
above types
struct OneDArrayStruct {
short short_array[2];
};
public ref class OneDArrayStruct {
array<System::Int16>^ short_array;
/*length == 2*/
};
Table 3.5
Specifying Data Types in IDL for C++/CLI
IDL Type Sample Entry in IDL File Sample Output Generated by rtiddsgen
3.3 Creating User Data Types with IDL
3-65
3. User Data Types
bounded
sequence of
above types
(see Note 11
below)
struct SequenceStruct {
sequence<short,4> short_sequence;
};
public ref class SequenceStruct {
ShortSeq^ short_sequence;
/*max = 4*/
};
Note: Sequences of primitive types have been
predefined by RTI Data Distribution Service.
unbounded
sequence of
above types
(see Note 11
below)
struct SequenceStruct {
sequence<short> short_sequence;
};
public ref class SequenceStruct {
ShortSeq^ short_sequence;
/*max = <default bound>*/
};
Note: rtiddsgen will supply a default bound.
You can specify that bound with the
-sequenceSize command-line option; see
Section 3.6.1.
array of
sequences
struct ArraysOfSequences{
sequence<short,4>
sequences_array[2];
};
public ref class ArraysOfSequences
{
array<DDS::ShortSeq^>^
sequences_array;
// maximum length = (2)
};
bounded
string
struct PrimitiveStruct {
string<20> string_member;
};
public ref class PrimitiveStruct {
System::String^ string_member;
// maximum length = (20)
};
unbounded
string
struct PrimitiveStruct {
string string_member;
};
public ref class PrimitiveStruct {
System::String^ string_member;
// maximum length = (255)
};
Note: rtiddsgen will supply a default bound.
You can specify that bound with the -stringSize
command-line option, see Section 3.6.1.
bounded
wstring
struct PrimitiveStruct {
wstring<20> wstring_member;
};
public ref class PrimitiveStruct {
System::String^ string_member;
// maximum length = (20)
};
Table 3.5
Specifying Data Types in IDL for C++/CLI
IDL Type Sample Entry in IDL File Sample Output Generated by rtiddsgen

Chapter 3
3-66
unbounded
wstring
struct PrimitiveStruct {
wstring wstring_member;
};
public ref class PrimitiveStruct {
System::String^ string_member; //
maximum length = (255)
};
Note: rtiddsgen will supply a default bound.
You can specify that bound with the -stringSize
command-line option, see Section 3.6.1.
module
module PackageName {
struct Foo {
long field;
};
};
namespace PackageName {
public ref class Foo {
System::Int32 field;
};
};
Table 3.6
Specifying Data Types in IDL for Java
IDL
Type
Sample Entry in IDL file Sample Java Output Generated by rtiddsgen
char
(see Note 5
below)
struct PrimitiveStruct {
char char_member;
};
public class PrimitiveStruct
{
public char char_member;
...
}
wchar
(see Note 5
below)
struct PrimitiveStruct {
wchar wchar_member;
};
public class PrimitiveStruct
{
public char wchar_member;
...
}
octet
struct PrimitiveStruct {
octet octet_member;
};
public class PrimitiveStruct
{
public byte byte_member;
...
}
short
struct PrimitiveStruct {
short short_member;
};
public class PrimitiveStruct
{
public short short_member;
...
}
Table 3.5
Specifying Data Types in IDL for C++/CLI
IDL Type Sample Entry in IDL File Sample Output Generated by rtiddsgen

3.3 Creating User Data Types with IDL
3-67
3. User Data Types
unsigned
short
(see Note 6
below)
struct PrimitiveStruct {
unsigned short
unsigned_short_member;
};
public class PrimitiveStruct
{
public short unsigned_short_member;
...
}
long
struct PrimitiveStruct {
long long_member;
};
public class PrimitiveStruct
{
public int long_member;
...
}
unsigned
long
(see Note 6
below)
struct PrimitiveStruct {
unsigned long
unsigned_long_member;
};
public class PrimitiveStruct
{
public int unsigned_long_member;
...
}
long long
struct PrimitiveStruct {
long long long_long_member;
};
public class PrimitiveStruct
{
public long long_long_member;
...
}
unsigned
long long
(see Note 7
below)
struct PrimitiveStruct {
unsigned long long
unsigned_long_long_member;
};
public class PrimitiveStruct
{
public long
unsigned_long_long_member;
...
}
float
struct PrimitiveStruct {
float float_member;
};
public class PrimitiveStruct
{
public float float_member;
...
}
double
struct PrimitiveStruct {
double double_member;
};
public class PrimitiveStruct
{
public double double_member;
...
}
long double
(see Note 7
below)
struct PrimitiveStruct {
long double long_double_member;
};
public class PrimitiveStruct
{
public double long_double_member;
...
}
Table 3.6
Specifying Data Types in IDL for Java
IDL
Type
Sample Entry in IDL file Sample Java Output Generated by rtiddsgen

Chapter 3
3-68
pointer
(see Note 9
below)
struct MyStruct {
long * member;
};
public class MyStruct {
public int member;
...
};
boolean
struct PrimitiveStruct {
boolean boolean_member;
};
public class PrimitiveStruct
{
public boolean boolean_member;
...
}
enum
enum PrimitiveEnum {
ENUM1,
ENUM2,
ENUM3
};
public class PrimitiveEnum extends Enum
{
public static PrimitiveEnum ENUM1 =
new PrimitiveEnum ("ENUM1", 0);
public static PrimitiveEnum ENUM2 =
new PrimitiveEnum ("ENUM2", 1);
public static PrimitiveEnum ENUM3 =
new PrimitiveEnum ("ENUM3", 2);
public static PrimitiveEnum
valueOf(int ordinal);
...
}
enum PrimitiveEnum {
ENUM1 = 10,
ENUM2 = 20,
ENUM3 = 30
};
public class PrimitiveEnum extends Enum
{
public static PrimitiveEnum ENUM1 =
new PrimitiveEnum ("ENUM1", 10);
public static PrimitiveEnum ENUM2 =
new PrimitiveEnum ("ENUM2", 10);
public static PrimitiveEnum ENUM3 =
new PrimitiveEnum ("ENUM3", 20);
public static PrimitiveEnum
valueOf(int ordinal);
...
}
Table 3.6
Specifying Data Types in IDL for Java
IDL
Type
Sample Entry in IDL file Sample Java Output Generated by rtiddsgen

3.3 Creating User Data Types with IDL
3-69
3. User Data Types
constant const short SIZE = 5;
public class SIZE {
public static final short VALUE = 5;
}
bitfield
(see Note 12
below)
struct BitfieldType {
short myShort_1 : 1;
long myLong_1: 1;
char myChar_1 : 1;
wchar myWChar_1 : 1;
octet myOctet_1 : 1;
short : 0;
long myLong_5 : 5;
long myLong_30 : 30;
short myShort_6 : 6;
short myShort_3and4 : 3+4;
short myShort;
short myShort_8 : 8;
long myLong_32: 32;
};
public class BitfieldType
{
public short myShort_1;
public int myLong_1;
public byte myChar_1;
public char myWChar_1;
public byte myOctet_1;
public int myLong_5;
public int myLong_30;
public short myShort_6;
public short myShort_3and4;
public short myShort;
public short myShort_8;
public int myLong_32;
...
}
struct
(see Note 10
below)
struct PrimitiveStruct {
char char_member;
};
public class PrimitiveStruct
{
public char char_member;
}
union
(see Note 10
below)
union PrimitiveUnion switch (long){
case 1:
short short_member;
default:
long long_member;
};
public class PrimitiveUnion {
public int _d;
public short short_member;
public int long_member;
...
}
typedef of
primitives,
enums,
strings
(see Note 8
below)
typedef short ShortType;
struct PrimitiveStruct {
ShortType short_member;
};
/* typedefs are unwounded to the original
type when used */
public class PrimitiveStruct
{
public short short_member;
...
}
Table 3.6
Specifying Data Types in IDL for Java
IDL
Type
Sample Entry in IDL file Sample Java Output Generated by rtiddsgen

Chapter 3
3-70
typedef of
sequences
or arrays
(see Note 8
below)
typedef short ShortArray[2];
/* Wrapper class */
public class ShortArray
{
public short[] userData = new
short[2];
...
}
array
struct OneDArrayStruct {
short short_array[2];
};
public class OneDArrayStruct
{
public short[] short_array = new
short[2];
...
}
struct TwoDArrayStruct {
short short_array[1][2];
};
public class TwoDArrayStruct
{
public short[][] short_array = new
short[1][2];
...
}
bounded
sequence
(see Note 11
below)
struct SequenceStruct {
sequence<short,4>
short_sequence;
};
public class SequenceStruct
{
public ShortSeq short_sequence = new
ShortSeq((4));
...
}
Note: Sequences of primitive types have been pre-
defined by RTI Data Distribution Service.
unbounded
sequence
(see Note 11
below)
struct SequenceStruct {
sequence<short> short_sequence;
};
public class SequenceStruct
{
public ShortSeq short_sequence = new
ShortSeq((100));
...
}
Note: rtiddsgen will supply a default bound. You
can specify that bound with the “-sequenceSize”
command-line option; see Section 3.6.1.
array of
sequences
struct ArraysOfSequences{
sequence<short,4>
sequences_array[2];
};
public class ArraysOfSequences
{
public ShortSeq[] sequences_array =
new ShortSeq[2];
...
}
Table 3.6
Specifying Data Types in IDL for Java
IDL
Type
Sample Entry in IDL file Sample Java Output Generated by rtiddsgen

3.3 Creating User Data Types with IDL
3-71
3. User Data Types
sequence of
arrays
(see Note 11
below)
typedef short ShortArray[2];
struct SequenceOfArrays{
sequence<ShortArray,2>
arrays_sequence;
};
/* Wrapper class */
public class ShortArray
{
public short[] userData = new
short[2];
...
}
/* Sequence of wrapper class objects */
public final class ShortArraySeq
extends ArraySequence
{
...
}
public class SequenceOfArrays
{
public ShortArraySeq arrays_sequence
= new ShortArraySeq((2));
...
}
sequence of
sequences
(see Note 4
and Note 11
below)
typedef sequence<short,4>
ShortSequence;
struct SequencesOfSequences{
sequence<ShortSequence,2>
sequences_sequence;
};
/* Wrapper class */
public class ShortSequence
{
public ShortSeq userData = new
ShortSeq((4));
...
}
/* Sequence of wrapper class objects */
public final class ShortSequenceSeq
extends ArraySequence
{
...
}
public class SequencesOfSequences
{
public ShortSequenceSeq
sequences_sequence = new
ShortSequenceSeq((2));
...
}
Table 3.6
Specifying Data Types in IDL for Java
IDL
Type
Sample Entry in IDL file Sample Java Output Generated by rtiddsgen

Chapter 3
3-72
bounded
string
struct PrimitiveStruct {
string<20> string_member;
};
public class PrimitiveStruct
{
public String string_member = new
String();
/* maximum length = (20) */
...
}
unbounded
string
struct PrimitiveStruct {
string string_member;
};
public class PrimitiveStruct
{
public String string_member = new
String();
/* maximum length = (255) */
...
}
Note: rtiddsgen will supply a default bound. You
can specify that bound with the -stringSize
command-line option, see Section 3.6.1.
bounded
wstring
struct PrimitiveStruct {
wstring<20> wstring_member;
};
public class PrimitiveStruct
{
public String wstring_member = new
String();
/* maximum length = (20) */
...
}
unbounded
wstring
struct PrimitiveStruct {
wstring wstring_member;
};
public class PrimitiveStruct
{
public String wstring_member = new
String();
/* maximum length = (255) */
...
}
Note: rtiddsgen will supply a default bound.
module
module PackageName {
struct Foo {
long field;
};
};
package PackageName;
public class Foo
{
public int field;
…
}
Table 3.6
Specifying Data Types in IDL for Java
IDL
Type
Sample Entry in IDL file Sample Java Output Generated by rtiddsgen
3.3 Creating User Data Types with IDL
3-73
3. User Data Types
Notes for Table 3.4 through Table 3.6:
Note 1.
Note that in C and C++, primitive types are not represented as native lan-
guage types (e.g. long, char, etc.) but as custom types in the DDS
namespace (DDS_Long, DDS_Char, etc.). These typedefs are used to
ensure that a field’s size is the same across platforms.
Note 2. Some platforms do not support long double or have different sizes for
that type than defined by IDL (16 bytes). On such platforms,
DDS_LongDouble (as well as the unsigned version) is mapped to a char-
acter array that matches the expected size of that type by default. If you
are using a platform whose native mapping has exactly the expected size,
you can instruct RTI Data Distribution Service to use the native type
instead. That is, if sizeof(long double) == 16, you can tell RTI Data Distri-
bution Service to map DDS_LongDouble to long double by defining the
following macro either in code or on the compile line:
-DRTI_CDR_SIZEOF_LONG_DOUBLE=16
Note 3. Unions in IDL are mapped to structs in C and C++, so that RTI Data Dis-
tribution Service will not have to dynamically allocate memory for unions
containing variable-length fields such as strings or sequences. To be effi-
cient, the entire struct (or class in C++/CLI) is not sent when the union is
valuetype
(see Note 9
and Note 10
below)
valuetype MyValueType {
public MyValueType2 * member;
};
valuetype MyValueType {
public MyValueType2 member;
};
valuetype MyValueType:
MyBaseValueType {
public MyValueType2 * member;
};
public class MyValueType {
public MyValueType2 member;
….
};
public class MyValueType {
public MyValueType2 member;
….
};
public class MyValueType extends
MyBaseValueType
{
public MyValueType2 member;
….
}
Table 3.6
Specifying Data Types in IDL for Java
IDL
Type
Sample Entry in IDL file Sample Java Output Generated by rtiddsgen

Chapter 3
3-74
published. Instead, RTI Data Distribution Service uses the discriminator
field of the struct to decide what field in the struct is actually sent on the
wire.
Note 4. So-called "anonymous sequences" —sequences of sequences in which the
sequence element has no type name of its own—are not supported. Such
sequences are deprecated in CORBA and may be removed from future
versions of IDL. For example, this is not supported:
Not
Supported—>
sequence<sequence<short,4>,4> MySequence;
Sequences of typedef’ed types, where the typedef is really a sequence, are
supported. For example, this is supported:
Supported—>
typedef sequence<short,4> MyShortSequence;
sequence<MyShortSequence,4> MySequence;
Note 5. IDL wchar and char are mapped to Java char, 16-bit unsigned quantities
representing Unicode characters as specified in the standard OMG IDL to
Java mapping. In C++/CLI, char and wchar are mapped to System::Char.
Note 6. There are no unsigned types in Java. The unsigned version for integer
types is mapped to its signed version as specified in the standard OMG
IDL to Java mapping.
Note 7. There is no current support in Java for the IDL long double type. This
type is mapped to double as specified in the standard OMG IDL to Java
mapping.
Note 8. Java does not have a typedef construct, nor does C++/CLI. Typedefs for
types that are neither arrays nor sequences (struct, unions, strings,
wstrings, primitive types and enums) are "unwound" to their original
type until a simple IDL type or user-defined IDL type (of the non-typedef
variety) is encountered. For typedefs of sequences or arrays, rtiddsgen will
generate wrapper classes.
Note 9. In C and C++, all the members in a value type, structure or union that are
declared with the pointer symbol (‘*’) will be mapped to references
(pointers). In C++/CLI and Java, the pointer symbol is ignored because
the members are always mapped as references.
3.3 Creating User Data Types with IDL
3-75
3. User Data Types
Note 10. In-line nested types are not supported inside structures, unions or value-
types. For example, this is not supported:
Not
Supported—>
struct Outer {
short outer_short;
struct Inner {
char inner_char;
short inner_short;
} outer_nested_inner;
};
Note 11. The DDS implied type <Type>Seq cannot be explicitly declared in the
IDL file. For example, this is not supported:
Not
Supported—>
typedef sequence<Foo> FooSeq; //error
Note 12. Data types containing bitfield members are not supported by Dynamic-
Data (Section 3.8).
3.3.5 Escaped Identifiers
To use an IDL keyword as an identifier, the keyword has to be “escaped” by prepend-
ing an underscore, ‘_’. In addition, you must run rtiddsgen with the -enableEscapeChar
option. For example:
struct MyStruct {
octet _octet; // octet is a keyword. To use the type
// as a member name we add ‘_’
};
The use of ‘_’ is a purely lexical convention that turns off keyword checking. The gener-
ated code will not contain ‘_’. For example, the mapping to C would be as follows:
struct MyStruct {
unsigned char octet;
};
Note: If you generate code from an IDL file to a language ‘X’ (for example, C++), the
keywords of this language cannot be used as IDL identifiers, even if they are escaped.
For example:
struct MyStruct {
long int; // error
long _int; // error
};

Chapter 3
3-76
3.3.6 Referring to Other IDL Files
IDL files may refer to other IDL files using a syntax borrowed from C, C++, and C++/
CLI preprocessors:
#include “Bar.idl”
If such a statement is encountered by rtiddsgen and you are generating code for C, C++,
and C++/CLI, rtiddsgen will assume that code has been generated for Bar.idl with corre-
sponding header files, Bar.h and BarPlugin.h.
The generated code will automatically have:
#include “Bar.h”
#include “BarPlugin.h”
added where needed to compile correctly.
Because Java types do not refer to one another in the same way, it is not possible for
rtiddsgen to automatically generate Java import statements based on an IDL #include
statement. Any #include statements will be ignored when Java code is generated. To
add imports to your generated Java code, you should use the //@copy directive (see
Section 3.3.8.2).
3.3.7 Preprocessor Directives
rtiddsgen supports the standard preprocessor directives defined by the IDL specification,
such as #if, #endif, #include, and #define.
To support these directives, rtiddsgen calls an external C preprocessor before parsing the
IDL file. On Windows systems, the preprocessor is ‘cl.exe.’ On other architectures, the
preprocessor is ‘cpp.’ You can change the default preprocessor with the –ppPath option.
If you do not want to run the preprocessor, use the –ppDisable option. See rtiddsgen
Command-Line Arguments (Section 3.6.1).
3.3.8 Using Custom Directives
The following rtiddsgen-specific directives can be used in your IDL file:
//@key (see Section 3.3.8.1)
//@copy (see Section 3.3.8.2)
//@copy-c
//@copy-cppcli
//@copy-java
//@copy-declaration

3.3 Creating User Data Types with IDL
3-77
3. User Data Types
//@copy-c-declaration
//@copy-cppcli-declaration
//@copy-java-declaration
//@resolve-name [true | false] (see Section 3.3.8.3)
//@top-level [true | false] (see Section 3.3.8.4)
Custom directives start with “//@”. Note: Do not put a space between the slashes and
the @, or the directive will not be recognized by rtiddsgen.
The directives are also case-sensitive. For instance, you must use //@key (not //@Key).
3.3.8.1 The @key Directive
To declare a key for your data type, insert the @key directive in the IDL file after one or
more fields of the data type.
With each key, RTI Data Distribution Service associates an internal 16-byte representation,
called a key-hash.
If the maximum size of the serialized key is greater than 16 bytes, to generate the key-
hash, RTI Data Distribution Service computes the MD5 key-hash of the serialized key in
network-byte order. Otherwise (if the maximum size of the serialized key is <= 16
bytes), the key-hash is the serialized key in network-byte order.
Only struct definitions in IDL may have key fields. When rtiddsgen encounters //@key, it
considers the previously declared field in the enclosing structure to be part of the key.
Table 3.7 on page 3-77 shows some examples of keys.
Table 3.7 Example Keys
Type Key Fields
struct NoKey {
long member1;
long member2;
}
struct SimpleKey {
long member1; //@key
long member2;
}
member1
struct NestedKey {
SimpleKey member1; //@key
long member2;
}
member1.member1

Chapter 3
3-78
3.3.8.2 The @copy and Related Directives
To copy a line of text verbatim into the generated code files, use the @copy directive in
the IDL file. This feature is particularly useful when you want your generated code to
contain text that is valid in the target programming language but is not valid IDL. It is
often used to add user comments or headers or preprocessor commands into the gener-
ated code.
//@copy // Modification History
//@copy // --------------------
//@copy // 17Jul05aaa, Created.
//@copy
//@copy // #include “MyTypes.h”
For code that should only be copied if the language is C or C++, use @copy-c. For code
that should only be copied if the language is C++/CLI, use @copy-cppcli. For code that
should only be copied if the language is Java, use @copy-java. These variations allow
you to use the same IDL file for multiple languages. For example, to add import state-
ments to generated Java code:
//@copy-java import java.util.*;
The above line would be ignored if the same IDL file was used to generate C, C++, and
C++/CLI code.
struct NestedKey2 {
NoKey member1; //@key
long member2;
}
member1.member1
member1.member2
valuetype BaseValueKey {
public long member1; //@key
}
member1
valuetype DerivedValueKey :BaseValueKey {
public long member2; //@key
}
member1
member2
valuetype DerivedValue : BaseValueKey {
public long member2;
}
member1
struct ArrayKey {
long member1[3]; //@key
}
member1[0]
member1[1]
member1[2]
Table 3.7
Example Keys
Type Key Fields

3.3 Creating User Data Types with IDL
3-79
3. User Data Types
In C, C++, and C++/CLI, the lines are copied into all of the “foo*.[h, c, cxx, cpp]” files
generated from “foo.idl”. For Java, the lines are copied into all of the “*.java” files that
were generated from the original “.idl” file. The lines will not be copied into any addi-
tional files that are generated using the “-example” command line option.
If you want rtiddsgen to copy lines only into the files that declare the data types—
”foo.h” for C, C++, and C++/CLI, “foo.java” for Java—use the “//@copy*declaration”
forms of this directive.
Note that the first whitespace character to follow “//@copy” is considered a delimiter
and will not be copied into generated files. All subsequent text found on the line,
including any leading whitespaces will be copied.
//@copy-declaration only copies the text into the file where the type is declared
(<type>.h for C and C++, or <type>.java for Java).
//@copy-c-declaration is the same as //@copy-declaration, but is for C and C++ code.
//@copy-cppcli-declaration is the same as //@copy-declaration, but is for C++/CLI
code.
//@copy-java-declaration is the same as //@copy-declaration, but is for Java-only code.
3.3.8.3 The @resolve-name Directive
In IDL, the “module” keyword is used to create namespaces for the declaration of types
and classes defined within the file. Here is an example IDL definition:
module PackageName {
struct Foo {
long field;
};
};
For C++ and C++/CLI, you may use the -namespace command-line option, which
causes rtiddsgen to generate a namespace, such as the following:
namespace PackageName{
typedef struct Foo {
DDS_Long field;
} Foo;
} PackageName;
When generating C++/CLI, the -namespace option is considered to always be passed.
Module names are never prepended to class names.

Chapter 3
3-80
For C, or if you do not use the -namespace command-line option for C++ or C++/CLI,
the name of the module is concatenated with the name of the structure to create the
namespace. The resulting code looks like this:
typedef struct PackageName_Foo {
DDS_Long field;
} PackageName_Foo;
In Java, a Foo.java file will be created in a directory called PackageName to use the
equivalent concept as defined by Java. The file PackageName/Foo.java will contain a
declaration of Foo class:
public class Foo {
public int field;
...
};
In a more complicated example, consider the following IDL definition:
module PackageName {
struct Bar {
long field;
};
struct Foo {
Bar barField;
};
};
When rtiddsgen generates code for the above definition, it will resolve the “Bar” type to
be within the scope of the PackageName module and automatically generate fully-qual-
ified type names.
In C or C++, if you do not use -namespace, the resulting code will be:
typedef struct PackageName_Bar {
DDS_Long field;
} PackageName_Foo;
typedef struct PackageName_Foo {
PackageName_Bar barField;
} PackageName_Foo;

3.3 Creating User Data Types with IDL
3-81
3. User Data Types
In C++, if you use -namespace, the resulting code will be:
namespace PackageName {
typedef struct Bar {
DDS_Long field;
} Bar;
typedef struct Foo
{
PackageName::Bar barField;
} Foo;
}
And in Java, PackageName/Bar.java and PackageName/Foo.java would be created with
the following code respectively:
public class Bar {
public int field;
...
};
and
public class Foo {
public PackageName.Bar barField = PackageName.Bar.create();
...
};
However, sometimes you may not want rtiddsgen to resolve the types of variables when
modules are used. In the example above, instead of referring to the Bar as defined by the
same package, you may want the barField in Foo to use Bar directly without prepend-
ing a module name. To specify that rtiddsgen should not resolve the scope of a type, use
the ‘//@resolve-name false’ directive.
For example:
module PackageName {
struct Bar {
long field;
};
struct Foo {
Bar barField; //@resolve-name false
};
};

Chapter 3
3-82
When this directive is used, then for the field preceding the directive, rtiddsgen respects
the resolution of its type name indicated in the IDL file. It will use the type unmodified
in the generated code. In C and C++:
typedef struct PackageName_Bar {
DDS_Long field;
} PackageName_Foo;
typedef struct PackageName_Foo {
Bar barField;
} PackageName_Foo;
And in Java, in PackageName/Bar.java and PackageName/Foo.java respectively:
public class Bar {
public int field;
...
};
and
public class Foo {
public Bar barField = Bar.create();
...
};
It is up to you to include the correct header files (or if using Java, to import the correct
packages) so that the compiler resolves the ‘Bar’ type correctly.
When used at the end of the declaration of a structure in IDL, then the directive applies
to all types within the structure.
struct MyStructure {
Foo member1;
Bar member2;
}; //@resolve-name false
By default, without using the directive, rtiddsgen will try to resolve the type of a field
and to use the fully qualified name in the generated code. If the type is not found to be
defined within the same scope as the structure in which it is used or in a parent scope,
then rtiddsgen will generate code with just the type name itself, assuming that the name
will be resolved by the compiler through other means available to the user (header files
or import statements). A type is in the same scope as the structure if both the type and
the structure in which it is used are defined within the same module.

3.4 Creating User Data Types with Extensible Markup Language (XML)
3-83
3. User Data Types
3.3.8.4 The @top-level Directive
By default, rtiddsgen generates user-level type-specific methods for all structures/
unions found in an IDL file. These methods include the methods used by DataWriters
and DataReaders to send and receive data of a given type. General methods for writing
and reading that take a void pointer are not offered by the DDS API because they are
not type safe. Instead, type-specific methods must be created to support a particular
data type.
We use the term ‘top-level type’ to refer to the data type for which you intend to create a
DCPS To pic that can be published or subscribed to. For top-level types, rtiddsgen must
create all of the type-specific methods previously described in addition to the code to
serialize/deserialize those types. However, some of structures/unions defined in the
IDL file are only embedded within higher-level structures and are not meant to be pub-
lished or subscribed to individually. For non-top-level types, the DataWriters and
DataReaders methods to send or receive data of those types are superfluous and do not
need to be created. Although the existence of these methods is not a problem in and of
itself, code space can be saved if these methods are not generated in the first place.
You can mark non-top-level types in an IDL file with the directive ‘//@top-level false’ to
tell rtiddsgen not to generate type-specific methods. Code will still be generated to serial-
ize and deserialize those types, since they may be embedded in top-level types.
In this example, rtiddsgen will generate DataWriter/DataReader code for TopLevelStruct
only:
struct EmbeddedStruct{
short member;
}; //@top-level false
struct TopLevelStruct{
EmbeddedStruct member;
};
3.4 Creating User Data Types with Extensible Markup
Language (XML)
You can describe user data types with Extensible Markup Language (XML) notation.
RTI Data Distribution Service provides DTD and XSD files that describe the XML format;
see <NDDSHOME>/resource/qos_profiles_4.5x/rtiddsgen/schema/
rti_dds_topic_types.dtd and <NDDSHOME>/resource/qos_profiles_4.5x/rtiddsgen/

Chapter 3
3-84
schema/rti_dds_topic_types.xsd, respectively (in 4.5x, the x stands for the version letter
of the current release).
The XML validation performed by rtiddsgen always uses the DTD definition. If the
<!DOCTYPE> tag is not in the XML file, rtiddsgen will look for the default DTD docu-
ment in <NDDSHOME>/resource/rtiddsgen/schema. Otherwise, it will use the loca-
tion specified in <!DOCTYPE>.
We recommend including a reference to the XSD/DTD files in the XML documents.
This provides helpful features in code editors such as Visual Studio® and Eclipse™,
including validation and auto-completion while you are editing the XML. We recom-
mend including the reference to the XSD document in the XML files because it provides
stricter validation and better auto-completion than the DTD document.
To include a reference to the XSD document in your XML file, use the attribute
xsi:noNamespaceSchemaLocation in the <types> tag. For example
1
:
<?xml version="1.0" encoding="UTF-8"?>
<types xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance"
xsi:noNamespaceSchemaLocation=
"<same as NDDSHOME>/resource/rtiddsgen/schema/rti_dds_topic_types.xsd">
...
</types>
To include a reference to the DTD document in your XML file, use the <!DOCTYPE>
tag. For example
1
:
<?xml version="1.0" encoding="UTF-8"?>
<!DOCTYPE types SYSTEM
"<same as NDDSHOME>/resource/rtiddsgen/schema/rti_dds_topic_types.dtd">
<types>
...
</types>
Table 3.8 shows how to map the type system constructs into XML.
1. Replace <same as NDDSHOME> with the full path to the RTI Data Distribution Service installation direc-
tory.

3.4 Creating User Data Types with Extensible Markup Language (XML)
3-85
3. User Data Types
Table 3.8 Mapping Type System Constructs to XML
Type/Construct
Example
IDL XML
IDL XML
char char
struct PrimitiveStruct {
char char_member;
};
<struct name="PrimitiveStruct">
<member name="char_member"
type="char"/>
</struct>
wchar wchar
struct PrimitiveStruct {
wchar wchar_member;
};
<struct name="PrimitiveStruct">
<member name="wchar_member"
type="wchar"/>
</struct>
octet octet
struct PrimitiveStruct {
octet octet_member;
};
<struct name="PrimitiveStruct">
<member name="octet_member"
type="octet"/>
</struct>
short short
struct PrimitiveStruct {
short short_member;
};
<struct name="PrimitiveStruct">
<member name="short_member"
type="short"/>
</struct>
unsigned
short
unsignedShort
struct PrimitiveStruct {
unsigned short
unsigned_short_member;
};
<struct name="PrimitiveStruct">
<member name="unsigned_short_member"
type="unsignedShort"/>
</struct>
long long
struct PrimitiveStruct {
long long_member;
};
<struct name="PrimitiveStruct">
<member name="long_member"type="long"/>
</struct>
unsigned
long
unsignedLong
struct PrimitiveStruct {
unsigned long
unsigned_long_member;
};
<struct name="PrimitiveStruct">
<member name= "unsigned_long_member"
type="unsignedLong"/>
</struct>
long long longLong
struct PrimitiveStruct {
long long
long_long_member;
};
<struct name="PrimitiveStruct">
<member name="long_long_member"
type="longLong"/>
</struct>
unsigned
long long
unsignedLongLong
struct PrimitiveStruct {
unsigned long long
unsigned_long_long_member;
};
<struct name="PrimitiveStruct">
<member name="unsigned_long_long_member"
type="unsignedLongLong"/>
</struct>
float float
struct PrimitiveStruct {
float float_member;
};
<struct name="PrimitiveStruct">
<member name="float_member"
type="float"/>
</struct>

Chapter 3
3-86
double double
struct PrimitiveStruct {
double double_member;
};
<struct name="PrimitiveStruct">
<member name="double_member"
type="double"/>
</struct>
long
double
longDouble
struct PrimitiveStruct {
long double
long_double_member;
};
<struct name="PrimitiveStruct">
<member name= "long_double_member"
type="longDouble"/>
</struct>
boolean boolean
struct PrimitiveStruct {
boolean boolean_member;
};
<struct name="PrimitiveStruct">
<member name="boolean_member"
type="boolean"/>
</struct>
unbounded
string
string without
stringMaxLength
attribute or with
stringMaxLength set
to -1
struct PrimitiveStruct {
string string_member;
};
<struct name="PrimitiveStruct">
<member name="string_member"
type="string"/>
</struct>
or
<struct name="PrimitiveStruct">
<member name="string_member"
type="string" stringMaxLength="-1"/>
</struct>
bounded
string
string with
stringMaxLength
attribute
struct PrimitiveStruct {
string<20> string_member;
};
<struct name="PrimitiveStruct">
<member name="string_member"
type="string" stringMaxLength="20"/>
</struct>
unbounded
wstring
wstring without
stringMaxLength
attribute or with
stringMaxLength set
to -1
struct PrimitiveStruct {
wstring wstring_member;
};
<struct name="PrimitiveStruct">
<member name="wstring_member"
type="wstring"/>
</struct>
or
<struct name="PrimitiveStruct">
<member name="wstring_member"
type="wstring" stringMaxLength="-1"/>
</struct>
bounded
wstring
wstring with
stringMaxLength
attribute
struct PrimitiveStruct {
wstring<20>
wstring_member;
};
<struct name="PrimitiveStruct">
<member name="wstring_member"
type="wstring" stringMaxLength="20"/>
</struct>
Table 3.8 Mapping Type System Constructs to XML
Type/Construct
Example
IDL XML
IDL XML
3.4 Creating User Data Types with Extensible Markup Language (XML)
3-87
3. User Data Types
pointer
pointer attribute
with values
true,false,0 or 1
Default (if not
present): 0
struct PrimitiveStruct {
long * long_member;
};
<struct name="PointerStruct">
<member name="long_member" type="long"
pointer="true"/>
</struct>
bitfield
a
bitfield attribute
with the bitfield
length
struct BitfieldStruct {
short short_member: 1;
unsigned short
unsignedShort_member: 1;
short short_nmember_2: 0;
long long_member : 5;
};
<struct name="BitFieldStruct">
<member name="short_member"
type="short" bitField="1"/>
<member name="unsignedShort_member"
type="unsignedShort" bitField="1"/>
<member type="short" bitField="0"/>
<member name="long_member"
type="long" bitField="5"/>
</struct>
key direc-
tive
b
key attribute with
values true, false, 0
or 1
Default (if not
present): 0
struct KeyedPrimitiveStruct
{
short short_member; //@key
};
<struct name="KeyedPrimitiveStruct">
<member name="short_member"
type="short" key="true"/>
</struct>
resolve-
name direc-
tive
b
resolveName
attribute with values
true, false, 0 or 1
Default (if not
present): 1
struct
UnresolvedPrimitiveStruct {
PrimitiveStruct
primitive_member;
//@resolve-name false
};
<struct name=
"UnresolvedPrimitiveStruct">
<member name="primitive_member"
type="PrimitiveStruct"
resolveName="false"/>
</struct>
top-level
directive
b
topLevel
attribute with values
true, false, 0 or 1
Default (if not
present): 1
struct
TopLevelPrimitiveStruct {
short short_member;
}; //@top-level false
<struct name="TopLevelPrimitiveStruct"
topLevel="false">
<member name="short_member"
type="short"/>
</struct>
Other
directives
b
directive tag
//@copy This text will be
copied in the generated
files
<directive kind="copy">
This text will be copied in the
generated files
</directive>
Table 3.8 Mapping Type System Constructs to XML
Type/Construct
Example
IDL XML
IDL XML

Chapter 3
3-88
enum enum tag
enum PrimitiveEnum {
ENUM1,
ENUM2,
ENUM3
};
<enum name="PrimitiveEnum">
<enumerator name="ENUM1"/>
<enumerator name="ENUM2"/>
<enumerator name="ENUM3"/>
</enum>
enum PrimitiveEnum {
ENUM1 = 10,
ENUM2 = 20,
ENUM3 = 30
};
<enum name="PrimitiveEnum">
<enumerator name="ENUM1" value="10"/>
<enumerator name="ENUM2" value="20"/>
<enumerator name="ENUM3" value="30"/>
</enum>
constant const tag
const double PI = 3.1415;
<const name="PI" type="double"
value="3.1415"/>
struct struct tag
struct PrimitiveStruct {
short short_member;
};
<struct name="PrimitiveStruct">
<member name="short_member"
type="short"/>
</struct>
union union tag
union PrimitiveUnion switch
(long) {
case 1:
short short_member;
case 2:
case 3:
float float_member;
default:
long long_member;
};
<union name="PrimitiveUnion">
<discriminator type="long"/>
<case>
<caseDiscriminator value="1"/>
<member name="short_member"
type="short"/>
</case>
<case>
<caseDiscriminator value="2"/>
<caseDiscriminator value="3"/>
<member name="float_member"
type="float"/>
</case>
<case>
<caseDiscriminator value="default"/>
<member name="long_member"
type="long"/>
</case>
</union>
Table 3.8 Mapping Type System Constructs to XML
Type/Construct
Example
IDL XML
IDL XML
3.4 Creating User Data Types with Extensible Markup Language (XML)
3-89
3. User Data Types
valuetype valuetype tag
valuetype BaseValueType {
public long long_member;
};
valuetype DerivedValueType:
BaseValueType {
public long
long_member_2;
};
<valuetype name="BaseValueType">
<member name="long_member"
type="long" visibility="public"/>
</valuetype>
<valuetype name="DerivedValueType"
baseClass="BaseValueType">
<member name="long_member_2"
type="long" visibility="public"/>
</valuetype>
typedef typedef tag
typedef short ShortType; <typedef name="ShortType" type="short"/>
struct PrimitiveStruct {
short short_member;
};
typedef PrimitiveStruct
PrimitiveStructType;
<struct name="PrimitiveStruct">
<member name="short_member"
type="short"/>
</struct>
<typedef name="PrimitiveStructType"
type="nonBasic"
nonBasicTypeName="PrimitiveStruct"/>
arrays
Attribute
arrayDimensions
struct OneArrayStruct {
short short_array[2];
};
<struct name="OneArrayStruct">
<member name="short_array"
type="short" arrayDimensions="2"/>
</struct>
struct TwoArrayStruct {
short short_array[1][2];
};
<struct name="TwoArrayStruct">
<member name="short_array"
type="short" arrayDimensions="1,2"/>
</struct>
bounded
sequence
Attribute
sequenceMaxLength
> 0
struct SequenceStruct {
sequence<short,4>
short_sequence;
};
<struct name="SequenceStruct">
<member name="short_sequence"
type="short"
sequenceMaxLength="4"/>
</struct>
unbounded
sequence
Attribute sequence-
MaxLength set to -1
struct SequenceStruct {
sequence<short>
short_sequence;
};
<struct name="SequenceStruct">
<member name="short_sequence"
type="short" sequenceMaxLength="-1"/>
</struct>
Table 3.8 Mapping Type System Constructs to XML
Type/Construct
Example
IDL XML
IDL XML

Chapter 3
3-90
array of
sequences
Attributes
sequenceMaxLength
And
arrayDimensions
struct
ArrayOfSequencesStruct {
sequence<short,4>
short_sequence_array[2];
};
<struct name= "ArrayOfSequenceStruct">
<member name= "short_sequence_array"
type="short" arrayDimensions="2"
sequenceMaxLength="4"/>
</struct>
sequence of
arrays
Must be
implemented with a
typedef tag
typedef short
ShortArray[2];
struct
SequenceOfArraysStruct {
sequence<ShortArray,2>
short_array_sequence;
};
<typedef name="ShortArray"
type="short" dimensions="2"/>
<struct name=
"SequenceOfArrayStruct">
<member name= "short_array_sequence"
type="nonBasic"
nonBasicTypeName="ShortSequence"
sequenceMaxLength="2"/>
</struct>
sequence of
sequences
Must be
implemented with a
typedef tag
typedef sequence<short,4>
ShortSequence;
struct
SequenceOfSequencesStruct
{
sequence<ShortSequence,2>
short_sequence_sequence;
};
<typedef name="ShortSequence"
type="short"sequenceMaxLength="4"/>
<struct name="SequenceofSequencesStruct">
<member name="short_sequence_sequence"
type="nonBasic"
nonBasicTypeName="ShortSequence"
sequenceMax-Length="2"/>
</struct>
module module tag
module PackageName {
struct PrimitiveStruct {
long long_member;
};
};
<module name="PackageName">
<struct name="PrimitiveStruct">
<member name="long_member" type="long"/>
</struct>
</module>
include include tag
#include
"PrimitiveTypes.idl"
<include file="PrimitiveTypes.xml"/>
a. Data types containing bitfield members are not supported by DynamicData (Section 3.8).
b. Directives are RTI extensions to the standard IDL grammar. For additional information about direc-
tives see Using Custom Directives (Section 3.3.8).
Table 3.8
Mapping Type System Constructs to XML
Type/Construct
Example
IDL XML
IDL XML

3.5 Creating User Data Types with XML Schemas (XSD)
3-91
3. User Data Types
3.5 Creating User Data Types with XML Schemas (XSD)
You can describe data types with XML schemas (XSD), either independent or embedded
in a Web Services Description Language (WSDL) file. The format is based on the stan-
dard IDL-to-WSDL mapping described in the OMG document "CORBA to WSDL/
SOAP Interworking Specification." Defining a mapping between the DDS and WSDL
type systems enables integration between Data Distribution Service and Web Services
Technologies using WSDL.
Example Header for XSD:
<?xml version="1.0" encoding="UTF-8"?>
<xsd:schema xmlns:xsd="http://www.w3.org/2001/XMLSchema"
xmlns:dds="http://www.omg.org/dds"
xmlns:tns="http://www.omg.org/IDL-Mapped/"
targetNamespace="http://www.omg.org/IDL-Mapped/">
<xsd:import namespace="http://www.omg.org/dds"
schemaLocation="rti_dds_topic_types_common.xsd"/>
……
</xsd:schema>
Example Header for WSDL:
<?xml version="1.0" encoding="UTF-8"?>
<definitions xmlns="http://schemas.xmlsoap.org/wsdl/"
xmlns:dds="http://www.omg.org/dds"
xmlns:xsd="http://www.w3.org/2001/XMLSchema"
xmlns:tns="http://www.omg.org/IDL-Mapped/"
targetNamespace="http://www.omg.org/IDL-Mapped/">
<types>
<xsd:schema targetNamespace="http://www.omg.org/IDL-Mapped/">
<xsd:import namespace="http://www.omg.org/dds"
schemaLocation="rti_dds_topic_types_common.xsd"/>
……
</xsd:schema>
</types>
</definitions>
Table 3.9 describes how to map the DDS type system into XSD. The RTI Data Distribution
Service code generator, rtiddsgen, will only accept XSD or WSDL files that follow this
mapping.
Chapter 3
3-92
Table 3.9 Mapping Type System Constructs to XSD
Type/Construct Example
IDL XSD IDL XSD
char dds:char
a
struct PrimitiveStruct {
char char_member;
};
<xsd:complexType name=
"PrimitiveStruct">
<xsd:sequence>
<xsd:element name=
"char_member"
minOccurs=
"1" maxOccurs="1"
type="dds:char">
</xsd:sequence>
</xsd:complexType>
wchar dds:wchar
a
struct PrimitiveStruct {
wchar wchar_member;
};
<xsd:complexType name=
"PrimitiveStruct">
<xsd:sequence>
<xsd:element name=
"wchar_member"
minOccurs="1" maxOccurs="1"
type="dds:wchar">
</xsd:sequence>
</xsd:complexType>
octet xsd:unsignedByte
struct PrimitiveStruct {
octet octet_member;
};
<xsd:complexType name=
"PrimitiveStruct">
<xsd:sequence>
<xsd:element name=
"octet_member"
minOccurs="1" maxOccurs="1"
type="xsd:unsignedByte">
</xsd:sequence>
</xsd:complexType>
short xsd:short
struct PrimitiveStruct {
short short_member;
};
<xsd:complexType name=
"PrimitiveStruct">
<xsd:sequence>
<xsd:element name=
"short_member"
minOccurs="1" maxOccurs="1"
type="xsd:short"/>
</xsd:sequence>
</xsd:complexType>
unsigned
short
xsd:unsignedShort
struct PrimitiveStruct {
unsigned short
unsigned_short_member;
};
<xsd:complexType name=
"PrimitiveStruct">
<xsd:sequence>
<xsd:element name=
"unsigned_short_member"
minOccurs="1" maxOccurs="1"
type=
"xsd:unsignedShort"/>
</xsd:sequence>
</xsd:complexType>
long xsd:int
struct PrimitiveStruct {
long long_member;
};
<xsd:complexType name=
"PrimitiveStruct">
<xsd:sequence>
<xsd:element name=
"long_member"
minOccurs="1" maxOccurs="1"
type="xsd:int"/>
</xsd:sequence>
</xsd:complexType>

3.5 Creating User Data Types with XML Schemas (XSD)
3-93
3. User Data Types
unsigned long xsd:unsignedInt
struct PrimitiveStruct {
unsigned long
unsigned_long_member;
};
<xsd:complexType name=
"PrimitiveStruct">
<xsd:sequence>
<xsd:element name=
"unsigned_long_member"
minOccurs="1" maxOccurs="1"
type="xsd:unsignedInt"/>
</xsd:sequence>
</xsd:complexType>
long long xsd:long
struct PrimitiveStruct {
long long
long_long_member;
};
<xsd:complexType name=
"PrimitiveStruct">
<xsd:sequence>
<xsd:elementname=
"long_long_member"
minOccurs=
"1" maxOccurs="1"
type="xsd:long"/>
</xsd:sequence>
</xsd:complexType>
unsigned long
long
xsd:unsignedLong
struct PrimitiveStruct {
unsigned long long
unsigned_long_long_member;
};
<xsd:complexType name=
"PrimitiveStruct">
<xsd:sequence>
<xsd:element name=
"unsigned_long_long_member"
minOccurs="1" maxOccurs="1"
type="xsd:unsignedLong"/>
</xsd:sequence>
</xsd:complexType>
float xsd:float
struct PrimitiveStruct {
float float_member;
};
<xsd:complexType name=
"PrimitiveStruct">
<xsd:sequence>
<xsd:element name=
"float_member"
minOccurs="1" maxOccurs="1"
type="xsd:float"/>
</xsd:sequence>
</xsd:complexType>
double xsd:double
struct PrimitiveStruct {
double double_member;
};
<xsd:complexType name=
"PrimitiveStruct">
<xsd:sequence>
<xsd:element name=
"double_member"
minOccurs="1" maxOccurs="1"
type="xsd:double"/>
</xsd:sequence>
</xsd:complexType>
Table 3.9
Mapping Type System Constructs to XSD
Type/Construct Example
IDL XSD IDL XSD

Chapter 3
3-94
long
double
dds:longDouble
a
struct PrimitiveStruct {
long double
long_double_member;
};
<xsd:complexType name=
"PrimitiveStruct">
<xsd:sequence>
<xsd:element name=
"long_double_member"
minOccurs=
"1" maxOccurs="1"
type="dds:longDouble"/>
</xsd:sequence>
</xsd:complexType>
boolean xsd:boolean
struct PrimitiveStruct {
boolean
boolean_member;
};
<xsd:complexType name=
"PrimitiveStruct">
<xsd:sequence>
<xsd:element name=
"boolean_member"
minOccurs="1" maxOccurs="1"
type="xsd:boolean"/>
</xsd:sequence>
</xsd:complexType>
unbounded
string
xsd:string
struct PrimitiveStruct {
string string_member;
};
<xsd:complexType name=
"PrimitiveStruct">
<xsd:sequence>
<xsd:element name=
"string_member"
minOccurs="1" maxOccurs="1"
type="xsd:string"/>
</xsd:sequence>
</xsd:complexType>
bounded
string
xsd:string with
restriction to specify
the maximum length
struct PrimitiveStruct {
string<20> string_member;
};
<xsd:complexType name=
"PrimitiveStruct">
<xsd:sequence>
<xsd:element name=
"string_member"
minOccurs="1" maxOccurs="1">
<xsd:simpleType>
<xsd:restriction base=
"xsd:string">
<xsd:maxLength value=
"20"
fixed="true"/>
</xsd:restriction>
</xsd:simpleType>
</xsd:element>
</xsd:sequence>
</xsd:complexType>
unbounded
wstring
dds:wstring
a
struct PrimitiveStruct {
wstring wstring_member;
};
<xsd:complexType name=
"PrimitiveStruct">
<xsd:sequence>
<xsd:element name=
"wstring_member"
minOccurs="1" maxOccurs="1"
type="dds:wstring"/>
</xsd:sequence>
</xsd:complexType>
Table 3.9
Mapping Type System Constructs to XSD
Type/Construct Example
IDL XSD IDL XSD

3.5 Creating User Data Types with XML Schemas (XSD)
3-95
3. User Data Types
bounded
wstring
xsd:wstring with
restriction to specify
the maximum length
struct PrimitiveStruct {
wstring<20>
wstring_member;
};
<xsd:complexType name=
"PrimitiveStruct">
<xsd:sequence>
<xsd:element name=
"wstring_member"
minOccurs="1" maxOccurs="1">
<xsd:simpleType>
<xsd:restriction base=
"dds:wstring">
<xsd:maxLength value=
"20"
fixed="true"/>
</xsd:restriction>
</xsd:simpleType>
</xsd:element>
</xsd:sequence>
</xsd:complexType>
pointer
<!-- @pointer
<true|false|1|0> -->
Default (if not speci-
fied): false
struct PrimitiveStruct {
long * long_member;
};
<xsd:complexType name=
"PrimitiveStruct">
<xsd:sequence>
<xsd:element name=
"long_member"
minOccurs="1" maxOccurs="1"
type="xsd:int"/>
<!-- @pointer true -->
</xsd:sequence>
</xsd:complexType>
bitfield
b
<!-- @bitField
<bitfield length>
-->
struct BitfieldStruct {
short short_member: 1;
unsigned short
unsignedShort_member: 1;
short: 0;
long long_member: 5;
};
<xsd:complexType name=
"BitfieldStruct">
<xsd:sequence>
<xsd:element name=
"short_member"
minOccurs=
"1" maxOccurs="1"
type="xsd:short"/>
<!-- @bitField 1 -->
<xsd:element name=‘unsignedShort_member
"
minOccurs=
"1" maxOccurs="1"
type="xsd:unsignedShort"/>
<!-- @bitField 1 -->
<xsd:element name=
"_ANONYMOUS_3"
minOccurs=
"1" maxOccurs="1"
type="xsd:short"/>
<!-- @bitField 0 -->
<xsd:element name=
"long_member"
minOccurs="1" maxOccurs="1"
type="xsd:int"/>
<!-- @bitField 5 -->
</xsd:sequence>
</xsd:complexType>
Table 3.9
Mapping Type System Constructs to XSD
Type/Construct Example
IDL XSD IDL XSD

Chapter 3
3-96
key
directive
c
<!-- @key
<true|false|1|0>
-->
Default (if not speci-
fied): false
struct
KeyedPrimitiveStruct {
long long_member; //@key
};
<xsd:complexType name="KeyedPrimitiveStruct">
<xsd:sequence>
<xsd:element name="long_member"
minOccurs="1" maxOccurs="1"
type="xsd:int"/>
<!-- @key true -->
</xsd:sequence>
</xsd:complexType>
resolvename
directive
c
<!-- @resolveName
<true|false|1|0>
-->
Default (if not speci-
fied): true
struct
UnresolvedPrimitiveStruct
{
PrimitiveStruct
primitive_member;
//@resolve-name false
};
<xsd:complexType name=
"UnresolvedPrimitiveStruct">
<xsd:sequence>
<xsd:element name="primitive_member"
minOccurs="1" maxOccurs="1"
type="PrimitiveStruct"/>
<!-- @resolveName false -->
</xsd:sequence>
</xsd:complexType>
top-level
directive
c
<!-- @topLevel
<true|false|1|0> -->
Default (if not speci-
fied): true
struct
TopLevelPrimitiveStruct {
short short_member;
}; //@top-level false
<xsd:complexType
name="TopLevelPrimitiveStruct">
<xsd:sequence>
<xsd:element name="short_member"
minOccurs="1" maxOccurs="1"
type="xsd:short"/>
</xsd:sequence>
</xsd:complexType>
<!-- @topLevel false -->
other
directives
c
<!--
@<directive kind>
<value>
-->
//@copy This text will be
copied in the generated
files
<!--@copy This text will be copied in the
generated files -->
Table 3.9
Mapping Type System Constructs to XSD
Type/Construct Example
IDL XSD IDL XSD

3.5 Creating User Data Types with XML Schemas (XSD)
3-97
3. User Data Types
enum
xsd:simpleType with
enumeration
enum PrimitiveEnum {
ENUM1,
ENUM2,
ENUM3
};
enum PrimitiveEnum {
ENUM1 = 10,
ENUM2 = 20,
ENUM3 = 30
};
<xsd:simpleType name="PrimitiveEnum">
<xsd:restriction base="xsd:string">
<xsd:enumeration value="ENUM1"/>
<xsd:enumeration value="ENUM2"/>
<xsd:enumeration value="ENUM3"/>
</xsd:restriction>
</xsd:simpleType>
<xsd:simpleType name="PrimitiveEnum">
<xsd:restriction base="xsd:string">
<xsd:enumeration value="ENUM1">
<xsd:annotation>
<xsd:appinfo>
<ordinal>10</ordinal>
</xsd:appinfo>
</xsd:annotation>
</xsd:enumeration>
<xsd:enumeration value="ENUM2">
<xsd:annotation>
<xsd:appinfo>
<ordinal>20</ordinal>
</xsd:appinfo>
</xsd:annotation>
</xsd:enumeration>
<xsd:enumeration value="ENUM3">
<xsd:annotation>
<xsd:appinfo>
<ordinal>30</ordinal>
</xsd:appinfo>
</xsd:annotation>
</xsd:enumeration>
</xsd:restriction>
</xsd:simpleType>
constant IDL constants are mapped by substituting their value directly in the generated file
struct
xsd:complexType
with xsd:sequence
struct PrimitiveStruct {
short short_member;
};
<xsd:complexType name="PrimitiveStruct">
<xsd:sequence>
<xsd:element name="short_member"
minOccurs="1" maxOccurs="1"
type="xsd:short"/>
</xsd:sequence>
</xsd:complexType>
Table 3.9
Mapping Type System Constructs to XSD
Type/Construct Example
IDL XSD IDL XSD

Chapter 3
3-98
union
xsd:complexType
with xsd:choice
union PrimitiveUnion
switch (long) {
case 1:
short short_member;
default:
long long_member;
};
<xsd:complexType name="PrimitiveUnion">
<xsd:sequence>
<xsd:element name="discriminator"
type="xsd:int"/>
<xsd:choice>
<!-- case 1 -->
d
<xsd:element name="short_member"
minOccurs="0" maxOccurs="1"
type="xsd:short">
<xsd:annotation>
<xsd:appinfo>
<case>1</case>
</xsd:appinfo>
</xsd:annotation>
</xsd:element>
<!-- case default -->
<xsd:element name="long_member"
minOccurs="0" maxOccurs="1"
type="xsd:int">
<xsd:annotation>
<xsd:appinfo>
<case>default</case>
</xsd:appinfo>
</xsd:annotation>
</xsd:element>
</xsd:choice>
</xsd:sequence>
</xsd:complexType>
Table 3.9
Mapping Type System Constructs to XSD
Type/Construct Example
IDL XSD IDL XSD

3.5 Creating User Data Types with XML Schemas (XSD)
3-99
3. User Data Types
valuetype
xsd:complexType
with @valuetype
directive
valuetype BaseValueType {
public long
long_member;
};
valuetype
DerivedValueType:
BaseValueType {
public long
long_member2;
public long
long_member3;
};
<xsd:complexType name="BaseValueType">
<xsd:sequence>
<xsd:element name=”long_member"
maxOccurs="1" minOccurs="1"
type="xs:int"/>
<!-- @visibility public -->
</xsd:sequence>
</xs:complexType>
<!-- @valuetype true -->
<xs:complexType name="DerivedValueType">
<xs:complexContent>
<xs:extension base="BaseValueType">
<xs:sequence>
<xs:element name= "long_member2"
maxOccurs="1" minOccurs="1"
type="xs:int"/>
<!-- @visibility public -->
<xs:element name= "long_member3"
maxOccurs="1" minOccurs="1"
type="xs:int"/>
<!-- @visibility public -->
</xs:sequence>
</xs:extension>
</xs:complexContent>
</xs:complexType>
<!-- @valuetype true -->
Table 3.9
Mapping Type System Constructs to XSD
Type/Construct Example
IDL XSD IDL XSD
Chapter 3
3-100
typedef
Type definitions are
mapped to XML
schema type
restrictions
typedef short ShortType;
struct PrimitiveStruct {
short short_member;
};
typedef PrimitiveType
PrimitiveStructType;
<xsd:simpleType name="ShortType">
<xsd:restriction base="xsd:short"/>
</xsd:simpleType>
<!—- Struct definition -->
<xsd:complexType name="PrimitiveStruct">
<xsd:sequence>
<xsd:element name="short_member"
minOccurs="1" maxOccurs="1"
type="xsd:short"/>
</xsd:sequence>
</xsd:complexType>
<!—- Typedef definition -->
<xsd:complexType
name="PrimitiveTypeStructType">
<xsd:complexContent>
<xsd:restriction base=”PrimitiveStruct”>
<xsd:sequence>
<xsd:element name="short_member"
minOccurs="1" maxOccurs="1"
type="xsd:short"/>
</xsd:sequence>
</xsd:restriction>
</xsd:complexContent>
</xsd:complexType>
Table 3.9
Mapping Type System Constructs to XSD
Type/Construct Example
IDL XSD IDL XSD

3.5 Creating User Data Types with XML Schemas (XSD)
3-101
3. User Data Types
arrays
n xsd:complexType
with sequence
containing one
element with min &
max occurs
There is one
xsd:complexType
per array dimension
struct OneArrayStruct {
short short_array[2];
};
<!-- Array type -->
<xsd:complexType name=
"OneArrayStruct_short_array_ArrayOfShort">
<xsd:sequence>
<xsd:element name="item" minOccurs="2"
maxOccurs="2" type="xsd:short">
</xsd:element>
</xsd:sequence>
</xsd:complexType>
<!-- Struct w unidimensional array member -->
<xsd:complexType name="OneArrayStruct">
<xsd:sequence>
<xsd:element name="short_array"
minOccurs="1" maxOccurs="1"
type=
"OneArrayStruct_short_array_ArrayOfShort"/>
</xsd:sequence>
</xsd:complexType>
Table 3.9
Mapping Type System Constructs to XSD
Type/Construct Example
IDL XSD IDL XSD

Chapter 3
3-102
arrays
(cont’d)
n xsd:complexType
with sequence
containing one
element with min &
max occurs
There is one
xsd:complexType
per array dimension
struct TwoArrayStruct {
short short_array[2][1];
};
<!--Second dimension array type -->
<xsd:complexType name=
"TwoArrayStruct_short_array_ArrayOfShort">
<xsd:sequence>
<xsd:element name="item" minOccurs="2"
maxOccurs="2" type="xsd:short">
</xsd:element>
</xsd:sequence>
</xsd:complexType>
<!-- First dimension array type -->
<xsd:complexType name=
"TwoArrayStruct_short_array_ArrayOfArrayOfShort">
<xsd:sequence>
<xsd:element name="item"
minOccurs="1" maxOccurs="1"
type=
"TwoArrayStruct_short_array_ArrayOfShort">
</xsd:element>
</xsd:sequence>
</xsd:complexType>
<!--Struct containing a bidimensional array
member -->
<xsd:complexType name="TwoArrayStruct">
<xsd:sequence>
<xsd:element name="short_array"
minOccurs="1" maxOccurs="1"
type=
"TwoArrayStruct_short_array_ArrayOfArrayOfShort"/>
</xsd:sequence>
</xsd:complexType>
Table 3.9 Mapping Type System Constructs to XSD
Type/Construct Example
IDL XSD IDL XSD

3.5 Creating User Data Types with XML Schemas (XSD)
3-103
3. User Data Types
bounded
sequence
xsd:complexType
with sequence
containing one
element with min &
max occurs
struct SequenceStruct {
sequence<short,4>
short_sequence;
};
<!-- Sequence type -->
<xsd:complexType name=
"SequenceStruct_short_sequence_SequenceOfShort">
<xsd:sequence>
<xsd:element name="item" minOccurs="0"
maxOccurs="4" type="xsd:short">
</xsd:element>
</xsd:sequence>
</xsd:complexType>
<!-- Struct containing a bounded sequence
member -->
<xsd:complexType name="SequenceStruct">
<xsd:sequence>
<xsd:element name="short_sequence"
minOccurs="1" maxOccurs="1"
type=
"SequenceStruct_short_sequence_SequenceOfShort"/>
</xsd:sequence>
</xsd:complexType>
unbound-ed
sequence
xsd:complexType
with sequence
containing one
element with min &
max occurs
struct SequenceStruct {
sequence<short>
short_sequence;
};
<!-- Sequence type -->
<xsd:complexType name=
"SequenceStruct_short_sequence_SequenceOfShort">
<xsd:sequence>
<xsd:element name="item"
minOccurs="0" maxOccurs="unbounded"
type="xsd:short"/>
</xsd:sequence>
</xsd:complexType>
<!-- Struct containing an unbounded sequence
member -->
<xsd:complexType name="SequenceStruct">
<xsd:sequence>
<xsd:element name="short_sequence"
minOccurs="1" maxOccurs="1"
type=
"SequenceStruct_short_sequence_SequenceOfShort"/>
</xsd:sequence>
</xsd:complexType>
Table 3.9
Mapping Type System Constructs to XSD
Type/Construct Example
IDL XSD IDL XSD

Chapter 3
3-104
array of
sequences
n + 1
xsd:complexType
with sequence
containing one
element with min &
max occurs
There is one
xsd:complexType
per array dimension
and one
xsd:complexType for
the sequence
struct
ArrayOfSequencesStruct {
sequence<short,4>
sequence_sequence[2];
};
<!-- Sequence declaration -->
<xsd:complexType
name=
"ArrayOfSequencesStruct_sequence_array_SequenceOf
Short">
<xsd:sequence>
<xsd:element name="item"
minOccurs="0" maxOccurs="4"
type="xsd:short">
</xsd:element>
</xsd:sequence>
</xsd:complexType>
<!-- Array declaration -->
<xsd:complexType
name=
"ArrayOfSequencesStruct_sequence_array_ArrayOf
SequenceOfShort">
<xsd:sequence>
<xsd:element name="item"
minOccurs="2" maxOccurs="2"
type=
"ArrayOfSequencesStruct_sequence_array_SequenceOf
Short">
</xsd:element>
</xsd:sequence>
</xsd:complexType>
<!-- Structure containing a member that is an
array of sequences -->
<xsd:complexType name="ArrayOfSequencesStruct">
<xsd:sequence>
<xsd:element name="sequence_array"
minOccurs="1" maxOccurs="1"
type=
"ArrayOfSequencesStruct_sequence_array_ArrayOf
SequenceOfShort"/>
</xsd:sequence>
</xsd:complexType>
Table 3.9
Mapping Type System Constructs to XSD
Type/Construct Example
IDL XSD IDL XSD

3.5 Creating User Data Types with XML Schemas (XSD)
3-105
3. User Data Types
sequence of
arrays
Sequences of arrays
must be
implemented using
an explicit type
definition (typedef)
for the array
typedef short
ShortArray[2];
struct
SequenceOfArraysStruct {
sequence<ShortArray,2>
arrays_sequence;
};
<!-- Array declaration -->
<xsd:complexType name="ShortArray">
<xsd:sequence>
<xsd:element name="item"
minOccurs="2" maxOccurs="2"
type="xsd:short">
</xsd:element>
</xsd:sequence>
</xsd:complexType>
<!-- Sequence declaration -->
<xsd:complexType name=
"SequencesOfArraysStruct_array_sequence_SequenceO
fShortArray">
<xsd:sequence>
<xsd:element name="item"
minOccurs="0" maxOccurs="2"
type="ShortArray">
</xsd:element>
</xsd:sequence>
</xsd:complexType>
<!-- Struct containing a sequence of arrays -->
<xsd:complexType name="SequenceOfArraysStruct">
<xsd:sequence>
<xsd:element name="arrays_sequence"
minOccurs="1" maxOccurs="1"
type=
"SequencesOfArraysStruct_arrays_sequence_Sequence
OfShortArray"/>
</xsd:sequence>
</xsd:complexType>
Table 3.9
Mapping Type System Constructs to XSD
Type/Construct Example
IDL XSD IDL XSD

Chapter 3
3-106
sequence of
sequences
Sequences of
sequences must be
implemented using
an explicit type
definition (typedef)
for the second
sequence
typedef sequence<short,4>
ShortSequence;
struct
SequenceOfSequences {
sequence<ShortSequence, 2>
sequences_sequence;
};
<!-- Internal sequence declaration -->
<xsd:complexType name="ShortSequence">
<xsd:sequence>
<xsd:element name="item"
minOccurs="0" maxOccurs="4"
type="xsd:short">
</xsd:element>
</xsd:sequence>
</xsd:complexType>
<!-- External sequence declaration -->
<xsd:complexType name=
"SequencesOfSequences_sequences_sequence_Sequence
OfShortSequence">
<xsd:sequence>
<xsd:element name="item"
minOccurs="0" maxOccurs="2"
type="ShortSequence">
</xsd:element>
</xsd:sequence>
</xsd:complexType>
<!--Struct containing a sequence of sequences -->
<xsd:complexType name="SequenceOfSequences">
<xsd:sequence>
<xsd:element name="sequences_sequence"
minOccurs="1" maxOccurs="1"
type="SequencesOfSequences_
sequences_sequence_SequenceOfShortSequence"/>
</xsd:sequence>
</xsd:complexType>
module
Modules are mapped
adding the name of
the module before
the name of each
type inside the
module
module PackageName {
struct PrimitiveStruct {
long long_member;
};
};
<xsd:complexType name=
"PackageName.PrimitiveStruct">
<xsd:sequence>
<xsd:element name="long_member"
minOccurs="1" maxOccurs="1"
type="xsd:int"/>
</xsd:sequence>
</xsd:complexType>
include xsd:include
#include
"PrimitiveType.idl"
<xsd:include schemaLocation=
"PrimitiveType.xsd"/>
Table 3.9
Mapping Type System Constructs to XSD
Type/Construct Example
IDL XSD IDL XSD

3.6 Using rtiddsgen
3-107
3. User Data Types
3.5.1 Primitive Types
The primitive types char, wchar, long double, and wstring are not supported natively in
XSD. RTI Data Distribution Service provides definitions for these types in the file
<NDDSHOME>/resource/qos_profiles_4.5x
1
/schema/rti_dds_topic_types_common.xsd.
All files that use the primitive types char, wchar, long double and wstring must refer-
ence rti_dds_topic_types_common.xsd. For example:
<?xml version="1.0" encoding="UTF-8"?>
<xsd:schema xmlns:xsd="http://www.w3.org/2001/XMLSchema"
xmlns:dds="http://www.omg.org/dds">
<xsd:import namespace="http://www.omg.org/dds"
schemaLocation="rti_dds_topic_types_common.xsd"/>
<xsd:complexType name="Foo">
<xsd:sequence>
<xsd:element name="myChar" minOccurs="1"
maxOccurs="1" type="dds:char"/>
</xsd:sequence>
</xsd:complexType>
</xsd:schema>
3.6 Using rtiddsgen
The rtiddsgen utility provided by RTI Data Distribution Service creates the code needed to
define and register a user data type with RTI Data Distribution Service. Using this tool is
optional if:
❏ You are using dynamic types (see Managing Memory for Built-in Types (Section
3.2.8))
a. All files that use the primitive types char, wchar, long double and wstring must reference
rti_dds_topic_types_common.xsd. See Primitive Types (Section 3.5.1).
b. Data types containing bitfield members are not supported by DynamicData (Section 3.8).
c. Directives are RTI extensions to the standard IDL grammar. For additional information about directives see
Using Custom Directives (Section 3.3.8).
d. The discriminant values can be described using comments (as specified by the standard) or xsd:annotation
tags. We recommend using annotations because comments may be removed by XSD/XML parsers.
1. Replace the x in 4.5x with the version letter for the current RTI Data Distribution Service release.

Chapter 3
3-108
❏ You are using one of the built-in types (see Built-in Data Types (Section 3.2))
To use rtiddsgen, you must supply a description of the type in an IDL, XML, XSD, or
WSDL file. The supported syntax for each one of the notations is described in
Section 3.8.5.1 (IDL), Section 3.4 (XML) and Section 3.5 (XSD and WSDL). You can
define multiple data types in the same type-definition file.
Table 3.10 on page 3-108 (for C, C++, and C++/CLI and C# ) and Table 3.11 on page 3-
109 (for Java) show the files that rtiddsgen creates for an example IDL file called
Hello.idl. (The file extension will depend on the chosen language: .c for C, .cxx for C++,
.cpp for C++/CLI, .cs for C#.)
On Windows systems: Before running rtiddsgen, run VCVARS32.BAT in the same com-
mand prompt that you will use to run rtiddsgen.
Table 3.10 Files Created by rtiddsgen for C, C++, C++/CLI, C# for Example “Hello.idl”
Generated Files Description
Required files for the user data type. The source files should be compiled and linked with the user application. The
header files are required to use the data type in source.
You should not modify these files unless you intend to customize the generated code supporting your type.
Hello.[c,cxx, cpp]
HelloSupport.[c, cxx, cpp]
HelloPlugin.[c,cxx, cpp]
Generated code for the data types. These files contain the implementa-
tion for your data types.
Hello.h
HelloSupport.h
HelloPlugin.h
Header files that contain declarations used in the implementation of
your data types.
Optional files generated when you use the “-example <arch>” command-line option.
You may modify and use these files as a way to create simple applications that publish or subscribe to the user data
type.
Hello_publisher.[c, cxx, cpp, cs]
Example code for an application that publishes the user data type. This
example shows the basic steps to create all of the RTI Data Distribution
Service objects needed to send data.
You will need to modify the code to set and change the values being sent
in the data structure. Otherwise, just compile and run.
Hello_subscriber.[c, cxx, cpp,cs]
Example code for an application that subscribes to the user data type.
This example shows the basic steps to create all of the RTI Data Distribu-
tion Service objects needed to receive data using a “listener” function.
No modification of this file is required. It is ready for you to compile and
run.

3.6 Using rtiddsgen
3-109
3. User Data Types
Hello.dsw or Hello.sln,
Hello_publisher.dsp or
Hello_publisher.vcproj,
Hello_subscriber.dsp or
Hello_subscriber.vcproj
Microsoft Visual C++ or Visual Studio .NET Project workspace and proj-
ect files, generated only for “i86Win32” architectures. To compile the
generated source code, open the workspace file and build the two proj-
ects.
makefile_Hello_<architecture>
Makefile for non-Windows-based architectures. An example <architec-
ture> would be linux2.4gcc3.2.2.
Table 3.11 Files Created by rtiddsgen for Java for Example “Hello.idl”
Data Type Generated Files Description
Since the Java language requires individual files to be created for each class, rtiddsgen will generate a source file for
every IDL construct that translates into a class in Java.
Constants <Name>.java Class associated with the constant
Enums <Name>.java Class associated with enum type
Structures/
Unions
<Name>.java
<Name>Seq.java
<Name>DataReader.java
<Name>DataWriter.java
<Name>TypeSupport.java
Structure/Union class
Sequence class
RTI Data Distribution Service DataReader and DataWriter
classes
Support (serialize, deserialize, etc.) class
Typedef of
sequences
or arrays
<Name>.java
<Name>Seq.java
<Name>TypeSupport.java
Wrapper class
Sequence class
Support (serialize, deserialize, etc.) class
Table 3.10 Files Created by rtiddsgen for C, C++, C++/CLI, C# for Example “Hello.idl”
Generated Files Description

Chapter 3
3-110
NOTE: Before using an rtiddsgen-generated makefile to compile an application, make
sure the ${NDDSHOME} environment variable is set as described in the Getting Started
Guide. For INTEGRITY architectures, ${NDDSHOME} must be set when generating the
project files.
Optional files generated when you use the “-example <arch>” command-line option. You may modify and use these
files as a way to create simple applications that publish or subscribe to the user data type.
Structures/
Unions
<Name>Publisher.java
<Name>Subscriber.java
Example code for applications that publish or subscribe to
the user data type. You should modify the code in the
publisher application to set and change the value of the
published data. Otherwise, both files should be ready to
compile and run.
makefile_Hello_<architec-
ture>
Makefile for non-Windows-based architectures. An exam-
ple <architecture> is linux2.4gcc3.2.2.
Structures/
Unions/
Typedefs/
Enums
<Name>TypeCode.java
(Note: this is not generated if you
use -notypecode)
Type code class associated with the IDL type given by
<Name>.
Table 3.11 Files Created by rtiddsgen for Java for Example “Hello.idl”
Data Type Generated Files Description

3.6 Using rtiddsgen
3-111
3. User Data Types
3.6.1 rtiddsgen Command-Line Arguments
There are several command-line options you can pass to rtiddsgen:
rtiddsgen [-d <outdir>]
[-language <C|C++|Java|C++/CLI|C#>]
[-namespace] (C++ only)
[-package <packagePrefix>] (Java only)
[-example <arch>]
[-replace]
[-debug]
Note: CORBA
support requires
the RTI CORBA
Compatibility
Kit
[-corba [client header file]] [-orb \<CORBA ORB\>]]
[-optimization <level of optimization>]
[-stringSize <Unbounded strings size>]
[-sequenceSize <Unbounded sequences size>]
[-notypecode]
[-ppDisable]
[-ppPath <preprocessor executable>]
[-ppOption <option>]
[-D <name>[=<value>]]
[-U <name>]
[-I <directory>]
[-noCopyable]
[-use42eAlignment]
[-enableEscapeChar]
[-typeSequenceSuffix <Suffix>]
[-convertToXml |
-convertToXsd |
-convertToWsdl |
-convertToIdl]
[-convertToCcl]
[-convertToCcs]
[-version]
[-help]
[-verbosity [1-3]]
[[-inputIdl] <IDLInputFile.idl> |
[-inputXml] <XMLInputFile.xml> |
[-inputXsd] <XSDInputFile.xsd> |
[-inputWsdl] <WSDLInputFile.wsdl>]
Table 3.12 describes the options (in alphabetical order).

Chapter 3
3-112
Table 3.12
Option Description
-convertToCcl
Converts the input type description file into CCL format. This option creates a new
file with the same name as the input file and a .ccl extension.
-convertToCcs
Converts the input type description file into CCs format. This option creates a new
file with the same name as the input file and a .ccs extension.
-convertToIdl
Converts the input type description file into IDL format. This option creates a new
file with the same name as the input file and a .idl extension.
-convertToWsdl
Converts the input type description file into WSDL format. This option creates a
new file with the same name as the input file and a .wsdl extension.
-convertToXml
Converts the input type description file into XML format. This option creates a new
file with the same name as the input file and a .xml extension.
-convertToXsd
Converts the input type description file into XSD format. This option creates a new
file with the same name as the input file and a .xsd extension.
-corba
This option is only available when using the RTI CORBA Compatibility Kit for RTI
Data Distribution Service (available for purchase as a separate product). Please see
Part 6: RTI CORBA Compatibility Kit.
-D
<name>[=<value>]
Defines preprocessor macros.
-d
Generates the output in the specified directory. By default, rtiddsgen will generate
files in the directory where the input type-definition file is found.
-debug
Creates XML files for debugging rtiddsgen only. Use this option only at the direction
of RTI support; it is unlikely to be useful to you otherwise.
-enableEscapeChar
Enables use of the escape character '_' in IDL identifiers. When -corba is used, this
option is always enabled.
-example <arch>
Generates example application code and makefiles (for UNIX-based systems) or
workspace and project files (for Windows systems) based on the type-definition file.
The parameter specifies the architecture for the example makefiles. Valid options for
<arch> are listed in the Platform Notes.
IDLInputFile.idl
File containing IDL descriptions of your data types. If -inputIdl is not used, the file
must have an .idl extension.
-I <directory>
Adds to the list of directories to be searched for type-definition files (IDL, XML,
XSD or WSDL files). Note: A type-definition file in one format cannot include a file
in another format.
-inputIdl Indicates that the input file is an IDL file, regardless of the file extension.
-inputWsdl Indicates that the input file is a WSDL file, regardless of the file extension.
-inputXml Indicates that the input file is a XML file, regardless of the file extension.
3.6 Using rtiddsgen
3-113
3. User Data Types
-inputXsd Indicates that the input file is a XSD file, regardless of the file extension.
-help Prints out the command line options for rtiddsgen.
-language
Specifies the language to use for the generated files. The default language is C++;
you can also choose C, C++/CLI, C#, or Java.
-namespace
Specifies the use of C++ namespace. (For C++ only. For C++/CLI and C#, it is
implied-namespaces are always used.)
-noCopyable
Forces rtiddsgen to put ‘copy’ logic into the corresponding TypeSupport class rather
than the type itself. This option is only used for Java code generation. This option is
not compatible with the use of ndds_standalone_type.jar (see Section 3.7). Note
that when generating code for Java, the -corba option implies the -noCopyable
option (whether or not you specify -noCopyable).
a
-notypecode
Disables type-code support. By using this option, you can generate code that can be
used in a standalone manner—see Using Generated Types without RTI Data Distri-
bution Service (Standalone) (Section 3.7).
Note: If you are using a large data type (more than 64 K) and type code support, you
will see a warning when type code information is sent. RTI Data Distribution Service
has a type code size limit of 64K. To avoid the warning when working with data
types with type codes larger than 64K, turn off type code support by using -notype-
code.
-replace
Allows rtiddsgen to overwrite any existing generated files. If it is not present and
existing files are found, rtiddsgen will print a warning but will not overwrite them.
-optimization See Optimizing Typedefs (-optimization) (Section 3.6.1.1 on Page 3-115)
-orb
Specifies the CORBA ORB. The majority of code generated is independent of the
ORB. However, for some IDL features the code generated depends on the ORB.
rtiddsgen generates code compatible with ACE-TAO or JacORB. To select an
ACE_TAO version use the -orb parameter. The default is ACE_TAO1.6.
This option can only be used with the -corba option.
-package
Specifies the root package into which generated classes will be placed. It applies to
Java only. If the type-definition file contains module declarations, those modules
will be considered subpackages of the package specified here.
-ppDisable Disables the preprocessor.
-ppOption
<option>
Specifies a preprocessor option. This parameter can be used multiple times to pro-
vide the command-line options for the specified preprocessor. See -ppPath.
Table 3.12
Option Description

Chapter 3
3-114
-ppPath
<preprocessor
executable>
Specifies the preprocessor. If you only specify the name of an executable (not a com-
plete path to that executable), the executable must be found in your Path. The
default value is "cpp" for non-Windows architectures and "cl.exe" for Windows
architectures.If you use -ppPath to provide the full path and filename for cl.exe or
the cpp preprocessor, you must also use -ppOption (described below) to set the fol-
lowing preprocessor options:
If you use a non-default path for cl.exe, you also need to set:
-ppOption /nologo -ppOption /C -ppOption /E -ppOption /X
If you use a non-default path for cpp, you also need to set:
-ppOption -C
-sequenceSize Sets the size assigned to unbounded sequences. The default value is 100 elements.
-stringSize
Sets the size assigned to unbounded strings, not counting a terminating NULL char-
acter. The default value is 255 bytes.
-typeSequenceSuf-
fix <suffix>
This option assigns a suffix to the names of the implicit sequences defined for IDL
types. It only applies if -corba is also specified. By default, the suffix is 'Seq'. There-
fore, given the type 'Foo' the name of the implicit sequence will be 'FooSeq'.
-U <name> Cancels any previous definition of <name>.
-use42eAlignment
Makes the generated code compatible with RTI Data Distribution Service 4.2e. This
option should be used when compatibility with 4.2e is required and the topic data
types contain double, long long, unsigned long long, or long double members.
-verbosity [1-3]
rtiddsgen verbosity:
1: exceptions
2: exceptions and warnings
3: exceptions, warnings and information (Default)
-version Displays the version of rtiddsgen being used.
WSDLInput-
File.wsdl
WSDL file containing XSD descriptions of your data types. If -inputWsdl is not
used, the file must have an .wsdl extension.
XMLInputFile.idl
File containing XML descriptions of your data types. If -inputXml is not used, the
file must have an .xml extension.
XSDInputFile.xsd
File containing XSD descriptions of your data types. If -inputXsd is not used, the file
must have an .xsd extension.
a. CORBA support is only available when using the RTI CORBA Compatibility Kit for RTI Data Distribution
Service (available for purchase as a separate product). See Part 6: RTI CORBA Compatibility Kit.
Table 3.12
Option Description

3.6 Using rtiddsgen
3-115
3. User Data Types
3.6.1.1 Optimizing Typedefs (-optimization)
The -optimization option specifies how support for typedefs is generated in C and C++
code. This option is only useful when there are typedefs defined in the IDL file. This
option only applies to C and C++ because the Java language does not contain the
typedef construct. In other words, rtiddsgen always resolves typedef’ed names to their
most basic types when generating Java code (except for typedefs of arrays and
sequences which are converted to wrapper classes—see Note 8 on Page 3-74). Effec-
tively, Java code is always generated with an equivalent optimization level of 2. Choices
are:
❏ 0 (default): No optimization. Typedef’ed types are treated as full types and type-
plugin and support code is generated and invoked when the typedefs are used
in other structures.
❏ 1: The compiler generates type-plugin and support code for typedefs but opti-
mizes its use. If a type is a typedef that can be resolved either to a primitive type
(char, short, long, etc.) or to another type that is defined in the same IDL file, then
when the typedef is used in the definition of another structure, rtiddsgen will
generate code that invokes the plugin and support code of the most basic type to
which the typedef can be resolved.
This will save at least one function call for serialization, deserialization, and
other manipulation of the parent structure. This optimization level is always safe
to use unless the user intends to modify the generated type-plugin and support
code. In that case, we recommend using the default of no optimization of
typedefs.
❏ 2: Same as level 1 with the addition that the type-plugin and support code for
typedefs are not generated (since they would not be used by the code for data
types defined in the same IDL file that uses the typedefs).
This typedef optimization level is only recommend if you only have a single IDL
file that contains the definitions of all of the user data types passed by RTI Data
Distribution Service on the network. If you have multiple IDL files, and types
defined in one file use typedefs that are defined in another, then rtiddsgen will
generate code assuming that the type-plugin and support code were generated
for the typedef’ed types. If level 2 optimization was used when generating the
code for the IDL file that contained the typedefs, then the plugin and support
code for the typedefs would not have been generated, and compilation and link-
ing errors will result.
Chapter 3
3-116
For example, consider this declaration:
typedef short MyShort
struct MyStructure {
MyShort member;
};
With optimization 0: The type-plugin and support code for MyStructure will use the
generated code for MyShort to serialize, deserialize, or otherwise manipulate the mem-
ber field of MyStructure.
With optimization 1: The type plug-in and support code for MyStructure will directly
serialize, deserialize or otherwise manipulate the member field of MyStructure as a
short—saving a function call. However, plugin and support code for MyShort is still
generated because it would be used by the code generated from another IDL file that
refers to MyShort.
With optimization 2: The type-plugin and support code for MyStructure will directly
serialize, deserialize or otherwise manipulate the member field of MyStructure as a
short–saving a function call. In addition, no plugin or support code for MyShort is gen-
erated.
3.7 Using Generated Types without RTI Data Distribution
Service (Standalone)
You can use the generated type-specific source and header files without linking the RTI
Data Distribution Service libraries or even including the RTI Data Distribution Service
header files. That is, the generated files for your data types can be used standalone.
The directory <NDDSHOME>/resource/rtiddsgen/standalone contains the required
helper files:
❏ include: header and templates files for C and C++.
❏ src: source files for C and C++.
❏ class: Java jar file.
Note: You must use rtiddsgen’s -notypecode option to generate code for standalone use.

3.7 Using Generated Types without RTI Data Distribution Service (Standalone)
3-117
3. User Data Types
3.7.1 Using Standalone Types in C
The generated files that can be used standalone are:
❏ <idl file name>.c: Types source file
❏ <idl file name>.h: Types header file
The type plug-in code (<idl file>Plugin.[c,h]) and type-support code (<idl file>Sup-
port.[c,h]) cannot be used standalone.
To use the rtiddsgen-generated types in a standalone manner:
1. Make sure you use rtiddsgen’s -notypecode option to generate the code.
2. Include the directory <NDDSHOME>/resource/rtiddsgen/standalone/include
in the list of directories to be searched for header files.
3. Add the source files, ndds_standalone_type.c and <idl file name>.c, to your
project.
4. Include the file <idl file name>.h in the source files that will use the generated
types in a standalone manner.
5. Compile the project using the following two preprocessor definitions:
a. NDDS_STANDALONE_TYPE
b. The definition for your platform (RTI_VXWORKS, RTI_QNX, RTI_WIN32,
RTI_INTY, RTI_LYNX or RTI_UNIX)
3.7.2 Using Standalone Types in C++
The generated files that can be used standalone are:
❏ <idl file name>.cxx: Types source file
❏ <idl file name>.h: Types header file
The type-plugin code (<idl file>Plugin.[cxx,h]) and type-support code (<idl file>Sup-
port.[cxx,h]) cannot be used standalone.
To use the generated types in a standalone manner:
1. Make sure you use rtiddsgen’s -notypecode option to generate the code.
2. Include the directory <NDDSHOME>/resource/rtiddsgen/standalone/include
in the list of directories to be searched for header files.

Chapter 3
3-118
3. Add the source files, ndds_standalone_type.cxx and <idl file name>.cxx, to
your project.
4. Include the file <idl file name>.h in the source files that will use the rtiddsgen
types in a standalone manner.
5. Compile the project using the following two preprocessor definitions:
a. NDDS_STANDALONE_TYPE
b. The definition for your platform (such as RTI_VXWORKS, RTI_QNX,
RTI_WIN32, RTI_INTY, RTI_LYNX or RTI_UNIX)
3.7.3 Standalone Types in Java
The generated files that can be used standalone are:
❏ <idl type>.java
❏ <idl type>Seq.java
The type code (<idl file>TypeCode.java), type-support code (<idl type>TypeSup-
port.java), DataReader code (<idl file>DataReader.java) and DataWriter code (<idl
file>DataWriter.java) cannot be used standalone.
To use the generated types in a standalone manner:
1. Make sure you use rtiddsgen’s -notypecode option to generate the code.
2. Include the file ndds_standalone_type.jar in the classpath of your project.
3. Compile the project using the standalone types files (<idl type>.java and <idl
type>Seq.java).
3.8 Interacting Dynamically with User Data Types
3.8.1 Introduction to TypeCode
Type schemas—the names and definitions of a type and its fields—are represented by
TypeCode objects. A type code value consists of a type code kind (see the TCKind enu-
meration below) and a list of members. For compound types like structs and arrays, this
list will recursively include one or more type code values.

3.8 Interacting Dynamically with User Data Types
3-119
3. User Data Types
enum TCKind {
TK_NULL,
TK_SHORT,
TK_LONG,
TK_USHORT,
TK_ULONG,
TK_FLOAT,
TK_DOUBLE,
TK_BOOLEAN,
TK_CHAR,
TK_OCTET,
TK_STRUCT,
TK_UNION,
TK_ENUM,
TK_STRING,
TK_SEQUENCE,
TK_ARRAY,
TK_ALIAS,
TK_LONGLONG,
TK_ULONGLONG,
TK_LONGDOUBLE,
TK_WCHAR,
TK_WSTRING,
TK_VALUE,
TK_SPARSE
}
Type codes unambiguously match type representations and provide a more reliable test
than comparing the string type names.
The TypeCode class, modeled after the corresponding CORBA API, provides access to
type-code information. For details on the available operations for the TypeCode class,
see the online documentation (select Modules, Topic Module, Type Code Support).
Type codes are enabled by default when you run
rtiddsgen. The -notypecode option dis-
ables generation of type code information. Type-code support does increase the amount
of memory used, so if you need to save on memory, you may consider disabling type
codes. See rtiddsgen Command-Line Arguments (Section 3.6.1).
Note: Type-code support must be enabled if you are going to use ContentFilteredTopics
(Section 5.4) with the default SQL filter. You may disable type codes and use a custom
filter, as described in Creating ContentFilteredTopics (Section 5.4.3).

Chapter 3
3-120
3.8.2 Defining New Types
Locally, your application can access the type code for a generated type "Foo" by calling
the Foo_get_typecode() operation in the code for the type generated by rtiddsgen (unless
type-code support is disabled with the -notypecode option). But you can also create
TypeCodes at run time without any code generation.
Creating a TypeCode is parallel to the way you would define the type statically: you
define the type itself with some name, then you add members to it, each with its own
name and type.
For example, consider the following statically defined type. It might be in C, C++, or
IDL; the syntax is largely the same.
struct MyType {
long my_integer;
float my_float;
bool my_bool;
string<128> my_string; // @key
};
This is how you would define the same type at run time in C++:
DDS_ExceptionCode_t ex = DDS_NO_EXCEPTION_CODE;
DDS_StructMemberSeq structMembers; // ignore for now
DDS_TypeCodeFactory* factory = DDS_TypeCodeFactory::get_instance();
DDS_TypeCode* structTc = factory->create_struct_tc(
"MyType", structMembers, ex);
// If structTc is NULL, check 'ex' for more information.
structTc->add_member("my_integer", DDS_TYPECODE_MEMBER_ID_INVALID,
factory->get_primitive_tc(DDS_TK_LONG),
DDS_TYPECODE_NONKEY_MEMBER, ex);
structTc->add_member("my_float", DDS_TYPECODE_MEMBER_ID_INVALID,
factory->get_primitive_tc(DDS_TK_FLOAT),
DDS_TYPECODE_NONKEY_MEMBER, ex);
structTc->add_member("my_bool", DDS_TYPECODE_MEMBER_ID_INVALID,
factory->get_primitive_tc(DDS_TK_BOOLEAN),
DDS_TYPECODE_NONKEY_MEMBER, ex);
structTc->add_member("my_string", DDS_TYPECODE_MEMBER_ID_INVALID,
factory->create_string_tc(128),
DDS_TYPECODE_KEY_MEMBER, ex);

3.8 Interacting Dynamically with User Data Types
3-121
3. User Data Types
More detailed documentation for the methods and constants you see above, including
example code, can be found in the RTI Data Distribution Service online documentation,
which is available in HTML and PDF formats for all supported programming lan-
guages.
If, as in the example above, you know all of the fields that will exist in the type at the
time of its construction, you can use the StructMemberSeq to simplify the code:
DDS_StructMemberSeq structMembers;
structMembers.ensure_length(4, 4);
DDS_TypeCodeFactory* factory = DDS_TypeCodeFactory::get_instance();
structMembers[0].name = DDS_String_dup("my_integer");
structMembers[0].type = factory->get_primitive_tc(DDS_TK_LONG);
structMembers[1].name = DDS_String_dup("my_float");
structMembers[1].type = factory->get_primitive_tc(DDS_TK_FLOAT);
structMembers[2].name = DDS_String_dup("my_bool");
structMembers[2].type = factory->get_primitive_tc(DDS_TK_BOOLEAN);
structMembers[3].name = DDS_String_dup("my_string");
structMembers[3].type = factory->create_string_tc(128);
structMembers[3].is_key = DDS_BOOLEAN_TRUE;
DDS_ExceptionCode_t ex = DDS_NO_EXCEPTION_CODE;
DDS_TypeCode* structTc = factory->create_struct_tc(
"MyType", structMembers, ex);
After you have defined the TypeCode, you will register it with a DomainParticipant
using a logical name. You will use this logical name later when you create a Topic.
DDSDynamicDataTypeSupport* type_support =
new DDSDynamicDataTypeSupport(
structTc, DDS_DYNAMIC_DATA_TYPE_PROPERTY_DEFAULT);
DDS_ReturnCode_t retcode = type_support->register_type(participant,
"My Logical Type Name");
Now that you have created a type, you will need to know how to interact with objects of
that type. Continue reading Section 3.8.3 below for more information.

Chapter 3
3-122
3.8.3 Sending Only a Few Fields
In some cases, your data model may contain a large number of potential fields, but it
may not be desirable or appropriate to include a value for every one of them with every
data sample.
❏ It may use too much bandwidth. You may have a very large data structure,
parts of which are updated very frequently. Rather than resending the entire data
structure with every change, you may wish to send only those fields that have
changed and rely on the recipients to reassemble the complete state themselves.
❏ It may not make sense. Some fields may only have meaning in the presence of
other fields. For example, you may have an event stream in which certain fields
are only relevant for certain kinds of events.
To support these and similar cases, RTI Data Distribution Service supports sparse value
types. A sample of such a type only contains the field values that were explicitly set by
the sender. A recipient of that sample will receive an error when trying to look up the
value of any other field.
An endpoint (DataWriter or DataReader) using a sparse value type will not communicate
with another endpoint using a non-sparse value type or structure type, even if the two
types contain similar member definitions, because these kinds of types have different
semantics. A structure or non-sparse value type is a commitment to provide exactly the
data described by the type's members and in a certain order. In contrast, a sparse value
type is a commitment to provide some subset of those data values in no particular order.
Because direct programming language representations of data types typically have no
way to express the concept of sparse fields (there is no way, for example, for a C struc-
ture to omit some of its fields), using sparse types requires use of the dynamic type API
described in Defining New Types (Section 3.8.2). You will use the Dynamic Data API to
work with sparse samples, just as you would with samples of any other dynamically
defined type. For more information about working with sparse samples, see Objects of
Dynamically Defined Types (Section 3.9.2) or the online (HTML) documentation.
A sparse version of the "MyType" type described above would be defined like this:
DDS_ExceptionCode_t ex = DDS_NO_EXCEPTION_CODE;
DDS_TypeCodeFactory* factory = DDS_TypeCodeFactory::get_instance();
DDS_TypeCode* sparseTc = factory->create_sparse_tc(
"MySparseType", DDS_VM_NONE, NULL, ex);
// add members
sparseTc->add_member("my_integer", ID_MY_INTEGER,
factory->get_primitive_tc(DDS_TK_LONG),
DDS_TYPECODE_NONKEY_MEMBER, ex);

3.8 Interacting Dynamically with User Data Types
3-123
3. User Data Types
sparseTc->add_member("my_float", ID_MY_FLOAT,
factory->get_primitive_tc(DDS_TK_FLOAT),
DDS_TYPECODE_NONKEY_MEMBER, ex);
sparseTc->add_member("my_bool", ID_MY_BOOL,
factory->get_primitive_tc(DDS_TK_BOOLEAN),
DDS_TYPECODE_NONKEY_MEMBER, ex);
sparseTc->add_member("my_string", ID_MY_STRING,
factory->create_string_tc(128),
DDS_TYPECODE_KEY_MEMBER, ex);
Detailed descriptions of the methods and constants you see above can be found in the
RTI Data Distribution Service API documentation.
Integral to the definition of a sparse type are the member IDs of its fields. An ID is a two-
byte integer that uniquely identifies a field within its parent type; these IDs are chosen
by the type's designer. (In the code example above, ID_MY_INTEGER, ID_MY_FLOAT,
and ID_MY_BOOL are examples of user-defined symbolic constants representing mem-
ber ID values.) When a sparse sample is serialized, the middleware will embed the IDs
of the fields that are present, so that recipients will know how to deserialize it.
Although member IDs are a relatively efficient way to describe a sample's contents, they
do use network bandwidth. This can be an important issue if you are considering using
sparse types to decrease the size of your data samples on the network. Although the rel-
ative cost of adding member IDs to your packets will vary depending on the sizes and
layout of your fields, the following is a good rule of thumb: if you expect a given data sam-
ple to contain less than half of the fields that are legal for its type, sparse types will prob-
ably save you on bandwidth. If, on the other hand, most samples contain most fields,
you will probably be better off using a plain structure type and simply ignoring irrele-
vant fields on the receiving side.
3.8.4 Type Extension and Versioning
As your system evolves, you may find that your data types need to change. And unless
your system is relatively small, you may not be able to bring it all down at once in order
to modify them. Instead, you may need to upgrade your types one component at a
time—or even on the fly, without bringing any part of the system down.
You can use the sparse types described above to efficiently version types—and not just
at the level of entire types, but at the level of individual fields.

Chapter 3
3-124
❏ You can add new fields to a type at any time. Because the type is sparse, existing
publishers of the type that have not been updated will simply omit the new field
in any data samples they send. If you anticipate changing your types in future
versions of your system, make sure that you ignore fields that you do not recog-
nize, so that your application will be robust to future type changes.
sparseTc->add_member("myNewInteger", ID_MY_NEW_INTEGER,
DDS_TheTypeCodeFactory->get_primitive_tc(TK_LONG),
DDS_TYPECODE_NONKEY_MEMBER, ex);
❏ You cannot remove fields from an existing type. Doing so would break older
applications and invalidate historical samples that might already be in the caches
of upgraded applications. Instead, simply stop sending values for the fields you
wish to deprecate.
3.8.5 Sending TypeCodes on the Network
In addition to being used locally, serialized type codes are typically published automat-
ically during discovery as part of the built-in topics for publications and subscriptions.
See Built-in DataReaders (Section 14.2). This allows applications to publish or subscribe
to topics of arbitrary types. This functionality is useful for generic system monitoring
tools like the rtiddsspy debug tool (in the online documentation, select Modules, Pro-
gramming Too ls ).
Note: Type codes are not cached by RTI Data Distribution Service upon receipt and are
therefore not available from the built-in data returned by the DataWriter's
get_matched_subscription_data() operation or the DataReader's
get_matched_publication_data() operation.
If your data type has an especially complex type code, you may need to increase the
value of the type_code_max_serialized_length field in the DomainParticipant's
DOMAIN_PARTICIPANT_RESOURCE_LIMITS QosPolicy (DDS Extension) (Section
8.5.4). Or, to prevent the propagation of type codes altogether, you can set this value to
zero (0). Be aware that some features of monitoring tools, as well as some features of the
middleware itself (such as ContentFilteredTopics) will not work correctly if you disable
TypeCode propagation.
3.8.5.1 Type Codes for Built-in Types
The type codes associated with the built-in types are generated from the following IDL
type definitions:

3.9 Working with Data Samples
3-125
3. User Data Types
module DDS {
/* String */
struct String {
string<max_size> value;
};
/* KeyedString */
struct KeyedString {
string<max_size> key; //@key
string<max_size> value;
};
/* Octets */
struct Octets {
sequence<octet, max_size> value;
};
/* KeyedOctets */
struct KeyedOctets {
string<max_size> key; //@key
sequence<octet, max_size> value;
};
};
The maximum size (max_size) of the strings and sequences that will be included in the
type code definitions can be configured on a per-DomainParticipant-basis by using the
properties in Table 3.13.
3.9 Working with Data Samples
You should now understand how to define and work with data types, whether you're
using the simple data types built into the middleware (see Built-in Data Types (Section
3.2)), dynamically defined types (see Managing Memory for Built-in Types (Section
3.2.8)), or code generated from IDL, XML, XSD, or WSDL files (see Sections 3.3 through
3.5).
Now that you have chosen one or more data types to work with, this section will help
you understand how to create and manipulate objects of those types.
3.9.1 Objects of Concrete Types
If you use one of the built-in types, or decide to generate custom types from an IDL or
XML file, your RTI Data Distribution Service data type is like any other data type in your

Chapter 3
3-126
application: a class or structure with fields, methods, and other members that you inter-
act with directly.
In C and C++, you create and delete your own objects from factories, just as you create
RTI Data Distribution Service objects from factories. In the case of user data types, the fac-
Table 3.13 Properties for Allocating Size of Built-in Types, per DomainParticipant
Built-in
Type
Property Description
String dds.builtin_type.string.max_size
Maximum size of the strings published by the
DataWriters and received by the DataReaders
belonging to a DomainParticipant (includes the
NULL-terminated character).
Default: 1024
Keyed-
String
dds.builtin_type.keyed_string.
max_key_size
Maximum size of the keys used by the DataWriters
and DataReaders belonging to a DomainParticipant
(includes the NULL-terminated character).
Default: 1024
dds.builtin_type.keyed_string.
max_size
Maximum size of the strings published by the
DataWriters and received by the DataReaders
belonging to a DomainParticipant using the built-in
type (includes the NULL-terminated character).
Default: 1024
Octets dds.builtin_type.octets.max_size
Maximum size of the octet sequences published by
the DataWriters and DataReaders belonging to a
DomainParticipant.
Default: 2048
Keyed-
Octets
dds.builtin_type.keyed_octets.
max_key_size
Maximum size of the key published by the
DataWriter and received by the DataReaders belong-
ing to the DomainParticipant (includes the NULL-
terminated character).
Default:1024.
dds.builtin_type.keyed_octets.
max_size
Maximum size of the octet sequences published by
the DataWriters and DataReaders belonging to a
DomainParticipant.
Default: 2048

3.9 Working with Data Samples
3-127
3. User Data Types
tory is a singleton object called the type support. Objects allocated from these factories
are deeply allocated and fully initialized.
/* In the generated header file: */
struct MyData {
char* myString;
};
/* In your code: */
MyData* sample = MyDataTypeSupport_create_data();
char* str = sample->myString; /*empty, non-NULL string*/
/* ... */
MyDataTypeSupport_delete_data(sample);
In C++, as in C, you create and delete objects using the TypeSupport factories.
MyData* sample = MyDataTypeSupport::create_data();
char* str = sample->myString; // empty, non-NULL string
// ...
MyDataTypeSupport::delete_data(sample);
In C# and C++/CLI, you can use a no-argument constructor to allocate objects. Those
objects will be deallocated by the garbage collector as appropriate.
// In the generated code (C++/CLI):
public ref struct MyData {
public:
System::String^ myString;
};
// In your code, if you are using C#:
MyData sample = new MyData();
System.String str = sample.myString; // empty, non-null string
// In your code, if you are using C++/CLI:
MyData^ sample = gcnew MyData();
System::String^ str = sample->myString; // empty, non-nullptr string

Chapter 3
3-128
In Java, you can use a no-argument constructor to allocate objects. Those objects will be
deallocated by the garbage collector as appropriate.
// In the generated code:
public class MyData {
public String myString = "";
}
// In your code:
MyData sample = new MyData();
String str = sample->myString; // empty, non-null string
3.9.2 Objects of Dynamically Defined Types
If you are working with a data type that was discovered or defined at run time, you will
use the reflective API provided by the DynamicData class to get and set the fields of
your object.
Consider the following type definition:
struct MyData {
long myInteger;
};
As with a statically defined type, you will create objects from a TypeSupport factory.
How to create or otherwise obtain a TypeCode, and how to subsequently create from it a
DynamicDataTypeSupport, is described in Defining New Types (Section 3.8.2).
For more information about the DynamicData and DynamicDataTypeSupport classes,
consult the online API documentation.
In C:
DDS_DynamicDataTypeSupport* support = ...;
DDS_DynamicData* sample =
DDS_DynamicDataTypeSupport_create_data(support);
DDS_Long theInteger = 0;
DDS_ReturnCode_t success = DDS_DynamicData_set_long(sample,
"myInteger", DDS_DYNAMIC_DATA_MEMBER_ID_UNSPECIFIED, 5);
/* Error handling omitted. */
success = DDS_DynamicData_get_long(sample, &theInteger,
"myInteger", DDS_DYNAMIC_DATA_MEMBER_ID_UNSPECIFIED);
/* Error handling omitted. "theInteger" now contains the value 5
if no error occurred.
*/

3.9 Working with Data Samples
3-129
3. User Data Types
In C++:
DDSDynamicDataTypeSupport* support = ...;
DDS_DynamicData* sample = support->create_data();
DDS_ReturnCode_t success = sample->set_long("myInteger",
DDS_DYNAMIC_DATA_MEMBER_ID_UNSPECIFIED, 5);
// Error handling omitted.
DDS_Long theInteger = 0;
success = sample->get_long(&theInteger, "myInteger",
DDS_DYNAMIC_DATA_MEMBER_ID_UNSPECIFIED);
// Error handling omitted.
// "theInteger" now contains the value 5 if no error occurred.
In C++/CLI:
using DDS;
DynamicDataTypeSupport^ support = ...;
DynamicData^ sample = support->create_data();
sample->set_long("myInteger",
DynamicData::MEMBER_ID_UNSPECIFIED, 5);
int theInteger = sample->get_long("myInteger",
0 /*redundant w/ field name*/);
/* Exception handling omitted.
* "theInteger" now contains the value 5 if no error occurred.
*/
In C#:
using namespace DDS;
DynamicDataTypeSupport support = ...;
DynamicData sample = support.create_data();
sample.set_long("myInteger", DynamicData.MEMBER_ID_UNSPECIFIED, 5);
int theInteger = sample.get_long("myInteger",
DynamicData.MEMBER_ID_UNSPECIFIED);
/* Exception handling omitted.
* "theInteger" now contains the value 5 if no error occurred.
*/

Chapter 3
3-130
In Java:
import com.rti.dds.dynamicdata.*;
DynamicDataTypeSupport support = ...;
DynamicData sample = (DynamicData) support.create_data();
sample.set_long("myInteger", DynamicData.MEMBER_ID_UNSPECIFIED, 5);
int theInteger = sample.get_long("myInteger",
DynamicData.MEMBER_ID_UNSPECIFIED);
/* Exception handling omitted.
* "theInteger" now contains the value 5 if no error occurred.
*/

4-1
4. DDS Entities
Chapter 4 DDS Entities
In DDS, the main classes extend an abstract base class called an Entity (see Figure 4.1).
Every Entity has a set of associated events known as statuses and a set of associated
Quality of Service Policies (QosPolicies). In addition, a Listener may be registered with
the Entity to be called when status changes occur. Entities may also have attached Condi-
tions, which provide a way to wait for status changes.
This chapter describes the common operations and general designed patterns shared by
all Entities including DomainParticipants, To pic s, Publishers, DataWriters, Subscribers, and
DataReaders. In subsequent chapters, the specific statuses, Listeners, Conditions, and
QosPolicies for each class will be discussed in detail.
This chapter includes the following sections:
❏ Common Operations for All DDS Entities (Section 4.1)
❏ QosPolicies (Section 4.2)
❏ Statuses (Section 4.3)
❏ Listeners (Section 4.4)
❏ Exclusive Areas (EAs) (Section 4.5)
❏ Conditions and WaitSets (Section 4.6)

Chapter 4
4-2
4.1 Common Operations for All DDS Entities
All Entities (DomainParticipants, To pic s, Publishers, DataWriters, Subscribers, and
DataReaders) provide operations for:
❏ Creating and Deleting Entities (Section 4.1.1)
❏ Enabling Entities (Section 4.1.2)
❏ Getting an Entity’s Instance Handle (Section 4.1.3)
❏ Getting Status and Status Changes (Section 4.1.4)
❏ Getting and Setting Listeners (Section 4.1.5)
❏ Getting the StatusCondition (Section 4.1.6)
❏ Getting and Setting QosPolicies (Section 4.1.7)
4.1.1 Creating and Deleting Entities
In DDS, the factory design pattern is used in creating and deleting Entities. Instead of
declaring and constructing or destructing Entities directly, a factory object is used to cre-
ate an Entity. Almost all entity factories are objects that are also entities. The only excep-
tion is the factory for a DomainParticipant. See Table 4.1.
Table 4.1 DDS Entity Factories
DDS Entity Created by
DomainParticipant
DomainParticipantFactory
(a static singleton object provided by RTI Data Distribution Service)
Topic
DomainParticipant
Publisher
Subscriber
DataWriter
a
DataReader
a
DataWriter
a
Publisher
DataReader
a
Subscriber
a. DataWriters may be created by a DomainParticipant or a Publisher. Similarly, DataReaders may be cre-
ated by a DomainParticipant or a Subscriber.

4.1 Common Operations for All DDS Entities
4-3
4. DDS Entities
All entities that are factories have:
❏ Operations to create and delete child entities. For example:
DDSPublisher::create_datawriter,
DDSDomainParticipant::delete_topic
❏ Operations to get and set the default QoS values used when creating child enti-
ties. For example:
DDSSubscriber::get_default_datareader_qos,
DDSDomainParticipantFactory::set_default_participant_qos
❏ An ENTITYFACTORY QosPolicy (Section 6.4.2) to specify whether or not the
newly created child entity should be automatically enabled upon creation.
An entity that is a factory cannot be deleted until all the child entities created by it have
been deleted.
Each Entity obtained through create_<entity>() must eventually be deleted by calling
delete_<entity>, or by calling delete_contained_entities().
4.1.2 Enabling Entities
The enable() operation changes an Entity from a non-operational to an operational state.
Entity objects can be created disabled or enabled. This is controlled by the value of the
ENTITYFACTORY QosPolicy (Section 6.4.2) on the corresponding factory for the Entity
(not on the Entity itself).
By default, all Entities are automatically created in the enabled state. This means that as
soon as the Entity is created, it is ready to be used. In some cases, you may want to cre-
ate the Entity in a ‘disabled’ state. For example, by default, as soon as you create a
DataReader, the DataReader will start receiving new samples for its Topic if they are being
sent. However, your application may still be initializing other components and may not
be ready to process the data at that time. In that case, you can tell the Subscriber to create
the DataReader in a disabled state. After all of the other parts of the application have
been created and initialized, then the DataReader can be enabled to actually receive mes-
sages.

Chapter 4
4-4
To create a particular entity in a disabled state, modify the EntityFactory QosPolicy of its
corresponding factory entity before calling create_<entity>(). For example, to create a
disabled DataReader, modify the Subscriber’s QoS as follows:
DDS_SubscriberQos subscriber_qos;
subscriber->get_qos(subscriber_qos);
subscriber_qos.entity_factory.autoenable_created_entities =
DDS_BOOLEAN_FALSE;
subscriber->set_qos(subscriber_qos);
DDSDataReader* datareader = subscriber->create_datareader(
topic, DDS_DATAREADER_QOS_DEFAULT, listener);
When the application is ready to process received data, it can enable the DataReader:
datareader->enable();
4.1.2.1 Rules for Calling enable()
In the following, a ‘Factory’ refers to a DomainParticipant, Publisher, or Subscriber; a
‘child’ refers to an entity created by the factory:
❏ If the factory is disabled, its children are always created disabled, regardless of
the setting in the factory's EntityFactoryQoS.
❏ If the factory is enabled, its children will be created either enabled or disabled,
according to the setting in the factory's EntityFactory Qos.
❏ Calling enable() on a child whose factory object is still disabled will fail and
return DDS_RECODE_RECONDITION_NOT_MET.
❏ Calling enable() on a factory with EntityFactoryQoS set to
DDS_BOOLEAN_TRUE will recursively enable all of the factory’s children. If
the factory’s EntityFactoryQoS is set to DDS_BOOLEAN_FALSE, only the fac-
tory itself will be enabled.
❏ Calling enable() on an entity that is already enabled returns
DDS_RETCODE_OK and has no effect.
❏ There is no complementary “disable” operation. You cannot disable an entity
after it is enabled. Disabled entities must have been created in that state.
❏ An entity’s Listener will only be invoked if the entity is enabled.
❏ The existence of an entity is not propagated to other DomainParticipants until the
entity is enabled (see Chapter 12: Discovery).

4.1 Common Operations for All DDS Entities
4-5
4. DDS Entities
❏ If a DataWriter/DataReader is to be created in an enabled state, then the associ-
ated Topic must already be enabled. The enabled state of the Topic does not mat-
ter, if the Publisher/Subscriber has its EntityFactory QosPolicy to create children
in a disabled state.
❏ When calling enable() for a DataWriter/DataReader, both the Publisher/Subscriber
and the Top ic must be enabled, or the operation will fail and return
DDS_RETCODE_PRECONDITION_NOT_MET.
The following operations may be invoked on disabled Entities:
❏ get_qos() and set_qos() Some DDS-specified QosPolicies are immutable—they
cannot be changed after an Entity is enabled. This means that for those policies, if
the entity was created in the disabled state, get/set_qos() can be used to change
the values of those policies until enabled() is called on the Entity. After the Entity
is enabled, changing the values of those policies will not affect the Entity. How-
ever, there are mutable QosPolicies whose values can be changed at anytime–
even after the Entity has been enabled.
Finally, there are extended QosPolicies that are not a part of the DDS specifica-
tion but offered by RTI Data Distribution Service to control extended features for
an Entity. Some of those extended QosPolicies cannot be changed after the Entity
has been created—regardless of whether the Entity is enabled or disabled.
Into which exact categories a QosPolicy falls—mutable at any time, immutable
after enable, immutable after creation—is described in the documentation for the
specific policy.
❏ get_status_changes() and get_*_status() The status of an Entity can be
retrieved at any time (but the status of a disabled Entity never changes).
❏ get_statuscondition() An Entity’s StatusCondition can be checked at any time
(although the status of a disabled Entity never changes).
❏ get_listener() and set_listener() An Entity’s Listener can be changed at any
time.
❏ create_*() and delete_*() A factory Entity can still be used to create or delete
any child Entity that it can produce. Note: following the rules discussed previ-
ously, a disabled Entity will always create its children in a disabled state, no mat-
ter what the value of the EntityFactory QosPolicy is.
❏ lookup_*() An Entity can always look up children it has previously created.
Most other operations are not allowed on disabled Entities. Executing one of those oper-
ations when an Entity is disabled will result in a return code of

Chapter 4
4-6
DDS_RETCODE_NOT_ENABLED. The documentation for a particular operation will
explicitly state if it is not allowed to be used if the Entity is disabled.
Note: The builtin transports are implicitly registered when (a) the DomainParticipant is
enabled, (b) the first DataWriter/DataReader is created, or (c) you look up a builtin data
reader, whichever happens first. Any changes to the builtin transport properties that are
made after the builtin transports have been registered will have no affect on any
DataWriters/DataReaders.
4.1.3 Getting an Entity’s Instance Handle
The Entity class provides an operation to retrieve an instance handle for the object. The
operation is simply:
InstanceHandle_t get_instance_handle()
An instance handle is a global ID for the entity that can be used in methods that allow
user applications to determine if the entity was locally created, if an entity is owned
(created) by another entity, etc.
4.1.4 Getting Status and Status Changes
The get_status_changes() operation retrieves the set of events, also known in DDS ter-
minology as communication statuses, in the Entity that have changed since the last time
get_status_changes() was called. This method actually returns a value that must be bit-
wise AND’ed with an enumerated bit mask to test whether or not a specific status has
changed. The operation can be used in a polling mechanism to see if any statuses related
to the Entity have changed. If an entity is disabled, all communication statuses are in the
“unchanged” state so the list returned by the get_status_changes() operation will be
empty.
A set of statuses is defined for each class of Entities. For each status, there is a corre-
sponding operation, get_<status-name>_status(), that can be used to get its current
value. For example, a DataWriter has a DDS_OFFERED_DEADLINE_MISSED status;
it also has a get_offered_deadline_missed_status() operation:
DDS_StatusMask statuses;
DDS_OfferedDeadlineMissedStatus deadline_stat;
statuses = datawriter->get_status_changes();

4.1 Common Operations for All DDS Entities
4-7
4. DDS Entities
if (statuses & DDS_OFFERED_DEADLINE_MISSED_STATUS) {
datawriter->get_offered_deadline_missed_status(&deadline_stat);
printf(“Deadline missed %d times.\n”,
deadline_stat.total_count);
}
See Section 4.4 for more information about statuses.
4.1.5 Getting and Setting Listeners
Each type of Entity has an associated Listener, see Listeners (Section 4.4). A Listener rep-
resents a set of functions that users may install to be called asynchronously when the
state of communication statuses change.
The get_listener() operation returns the current Listener attached to the Entity.
The set_listener() operation installs a Listener on an Entity. The Listener will only be
invoked on the changes of statuses specified by the accompanying mask. Only one lis-
tener can be attached to each Entity. If a Listener was already attached, set_listener() will
replace it with the new one.
The get_listener() and set_listener() operations are directly provided by the DomainPar-
ticipant, Topic , Publisher, DataWriter, Subscriber, and DataReader classes so that listeners
and masks used in the argument list are specific to each Entity.
Note: The set_listener() operation is not synchronized with the listener callbacks, so it is
possible to set a new listener on an participant while the old listener is in a callback.
Therefore you should be careful not to delete any listener that has been set on an
enabled participant unless some application-specific means are available of ensuring
that the old listener cannot still be in use.
See Section 4.4 for more information about Listeners.
4.1.6 Getting the StatusCondition
Each type of Entity may have an attached StatusCondition, which can be accessed
through the get_statuscondition() operation. You can attach the StatusCondition to a
WaitSet, to cause your application to wait for specific status changes that affect the
Entity.
See Section 4.6 for more information about StatusConditions and WaitSets.

Chapter 4
4-8
4.1.7 Getting and Setting QosPolicies
Each type of Entity has an associated set of QosPolicies (see Section 4.2). QosPolicies
allow you to configure and set properties for the Entity.
While most QosPolicies are defined by the DDS specification, some are offered by RTI
Data Distribution Service as extensions to control parameters specific to the implementa-
tion.
There are two ways to specify a QoS policy:
❏ Programmatically, as described in this section.
❏ QosPolicies can also be configured from XML resources (files, strings)—with this
approach, you can change the QoS without recompiling the application. The QoS
settings are automatically loaded by the DomainParticipantFactory when the
first DomainParticipant is created. See Chapter 15: Configuring QoS with XML.
The get_qos() operation retrieves the current values for the set of QosPolicies defined
for the Entity.
QosPolicies can be set programmatically when an Entity is created, or modified with the
Entity's set_qos() operation.
The set_qos() operation sets the QosPolicies of the entity. Note: not all QosPolicy
changes will take effect instantaneously; there may be a delay since some QosPolicies
set for one entity, for example, a DataReader, may actually affect the operation of a
matched entity in another application, for example, a DataWriter.
The get_qos() and set_qos() operations are passed QoS structures that are specific to
each derived entity class, since the set of QosPolicies that effect each class of entities is
different.
Each QosPolicy has default values (listed in the online documentation). If you want to
use custom values, there are three ways to change QosPolicy settings:
❏ Before Entity creation (if custom values should be used for multiple Entities). See
Section 4.1.7.1.
❏ During Entity creation (if custom values are only needed for a particular Entity).
See Section 4.1.7.2.
❏ After Entity creation (if the values initially specified for a particular Entity are no
longer appropriate). See Section 4.1.7.3.

4.1 Common Operations for All DDS Entities
4-9
4. DDS Entities
Regardless of when or how you make QoS changes, there are some rules to follow:
❏ Some QosPolicies interact with each other and thus must be set in a consistent
manner. For instance, the maximum value of the HISTORY QosPolicy’s depth
parameter is limited by values set in the RESOURCE_LIMITS QosPolicy. If the
values within a QosPolicy structure are inconsistent, then set_qos() will return
the error INCONSISTENT_POLICY, and the operation will have no effect.
❏ Some policies can only be set when the Entity is created, or before the Entity is
enabled. Others can be changed at any time. In general, all standard DDS
QosPolicies can be changed before the Entity is enabled. A subset can be changed
after the Entity is enabled. RTI Data Distribution Service-extended QosPolicies
either cannot be changed after creation or can be changed at any time. The
changeability of each QosPolicy is documented in the online documentation as
well as in Table 4.2. If you attempt to change a policy after it cannot be changed,
set_qos() will fail with a return IMMUTABLE_POLICY.
4.1.7.1 Changing the QoS Defaults Used to Create Entities: set_default_*_qos()
Each parent factory has a set of default QoS settings that are used when the child entity
is created. The DomainParticipantFactory has default QoS values for creating DomainPar-
ticipants. A DomainParticipant has a set of default QoS for each type of entity that can be
created from the DomainParticipant (Topic, Publisher, Subscriber, DataWriter, and
DataReader). Likewise, a Publisher has a set of default QoS values used when creating
DataWriters, and a Subscriber has a set of default QoS values used when creating
DataReaders.
An entity’s QoS are set when it is created. Once an entity is created, all of its QoS—for
itself and its child entities—are fixed unless you call set_qos() or set_qos_with_profile()
on that entity. Calling set_default_<entity>_qos() on a parent entity will have no effect
on child entities that have already been created.
You can change these default values so that they are automatically applied when new
child entities are created. For example, suppose you want all DataWriters for a particular
Publisher to have their RELIABILITY QosPolicy set to RELIABLE. Instead of making this
change for each DataWriter when it is created, you can change the default used when
any DataWriter is created from the Publisher by using the Publisher’s
set_default_datawriter_qos()
operation.
DDS_DataWriterQos default_datawriter_qos;
// get the current default values
publisher->get_default_datawriter_qos(default_datawriter_qos);
// change to desired default values

Chapter 4
4-10
default_datawriter_qos.reliability.kind =
DDS_RELIABLE_RELIABILITY_QOS;
// set the new default values
publisher->set_default_datawriter_qos(default_datawriter_qos);
// created datawriters will use new default values
datawriter = publisher->create_datawriter(topic, NULL, NULL, NULL);
Note: It is not safe to get or set the default QoS values for an entity while another thread
may be simultaneously calling get_default_<entity>_qos(),
set_default_<entity>_qos(), or create_<entity>() with
DDS_<ENTITY>_QOS_DEFAULT as the qos parameter (for the same entity).
Another way to make QoS changes is by using XML resources (files, strings). For more
information, see Chapter 15: Configuring QoS with XML.
4.1.7.2 Setting QoS During Entity Creation
If you only want to change a QosPolicy for a particular entity, you can pass in the
desired QosPolicies for an entity in its creation routine.
To customize an entity's QoS before creating it:
1. (C API Only) Initialize a QoS object with the appropriate INITIALIZER construc-
tor.
2. Call the relevant get_<entity>_default_qos() method.
3. Modify the QoS values as desired.
4. Create the entity.
For example, to change the RELIABLE QosPolicy for a DataWriter before creating it:
// Initialize the QoS object
DDS_DataWriterQos datawriter_qos;
// Get the default values
publisher->get_default_datawriter_qos(datawriter_qos);
// Modify the QoS values as desired
datawriter_qos.reliability.kind = DDS_BEST_EFFORT_RELIABILITY_QOS;
// Create the DataWriter with new values
datawriter =
publisher->create_datawriter(topic, datawriter_qos, NULL, NULL);

4.1 Common Operations for All DDS Entities
4-11
4. DDS Entities
Another way to set QoS during entity creation is by using a QoS profile. For more infor-
mation, see Chapter 15: Configuring QoS with XML.
4.1.7.3 Changing the QoS for an Existing Entity
Some policies can also be changed after the entity has been created. To change such a
policy after the entity has been created, use the entity’s set_qos() operation.
For example, suppose you want to tweak the DEADLINE QoS for an existing
DataWriter:
DDS_DataWriterQos datawriter_qos;
// get the current values
datawriter->get_qos(datawriter_qos);
// make desired changes
datawriter_qos.deadline.period.sec = 3;
datawriter_qos.deadline.period.nanosec = 0;
// set new values
datawriter->set_qos(datawriter_qos);
Another way to make QoS changes is by using a QoS profile. For more information, see
Chapter 15: Configuring QoS with XML.
Note: In the code examples presented in this section, we are not testing for the return
code for the set_qos(), set_default_*_qos() functions. If the values used in the QosPolicy
structures are inconsistent then the functions will fail and return
INCONSISTENT_POLICY. In addition, set_qos() may return IMMUTABLE_POLICY
if you try to change a QosPolicy on an Entity after that policy has become immutable.
User code should test for and address those anomalous conditions.
4.1.7.4 Default Values
RTI Data Distribution Service provides special constants for each Entity type that can be
used in set_qos() and set_default_*_qos() to reset the QosPolicy values to the original
RTI Data Distribution Service default values:
❏ DDS_PARTICIPANT_QOS_DEFAULT
❏ DDS_PUBLISHER_QOS_DEFAULT
❏ DDS_SUBSCRIBER_QOS_DEFAULT
❏ DDS_DATAWRITER_QOS_DEFAULT

Chapter 4
4-12
❏ DDS_DATAREADER_QOS_DEFAULT
❏ DDS_TOPIC_QOS_DEFAULT
For example, if you want to set a DataWriter’s QoS back to their RTI Data Distribution
Service-specified default values:
datawriter->set_qos(DDS_DATAWRITER_QOS_DEFAULT);
Or if you want to reset the default QosPolicies used by a Publisher to create DataWriters
back to their RTI Data Distribution Service-specified default values:
publisher->set_default_datawriter_qos(DDS_DATAWRITER_QOS_DEFAULT);
Note:
These defaults cannot be used to initialize a QoS structure for an entity. For exam-
ple, the following is NOT allowed:
Not Allowed—>
DataWriterQos dataWriterQos = DATAWRITER_QOS_DEFAULT;
// modify QoS...
create_datawriter(dataWriterQos);
4.2 QosPolicies
RTI Data Distribution Service’s behavior is controlled by the Quality of Service (QoS) pol-
icies of the data communication entities (DomainParticipant, Topic, Publisher, Subscriber,
DataWriter, and DataReader) used in your applications. This section summarizes each of
the QosPolicies that you can set for the various entities.
The QosPolicy class is the abstract base class for all the QosPolicies. It provides the basic
mechanism for an application to specify quality of service parameters. Table 4.2 on
page 4-13 lists each supported QosPolicy (in alphabetical order), provides a summary,
and points to a section in the manual that provides further details.
The detailed description of a QosPolicy that applies to multiple Entities is provided in
the first chapter that discusses an Entity whose behavior the QoS affects. Otherwise, the
discussion of a QosPolicy can be found in the chapter of the particular Entity to which
the policy applies. As you will see in the detailed description sections, all QosPolicies
have one or more parameters that are used to configure the policy. The how’s and why’s
of tuning the parameters are also discussed in those sections.
As first discussed in Controlling Behavior with Quality of Service (QoS) Policies (Sec-
tion 2.5.1), QosPolicies may interact with each other, and certain values of QosPolicies
can be incompatible with the values set for other policies.

4.2 QosPolicies
4-13
4. DDS Entities
The set_qos() operation will fail if you attempt to specify a set of values would result in
an inconsistent set of policies. To indicate a failure, set_qos() will return
INCONSISTENT_POLICY. Section 4.2.1 provides further information on QoS compati-
bility within an Entity as well as across matching Entities, as does the discussion/refer-
ence section for each QosPolicy listed in Table 4.2 on page 4-13.
The values of some QosPolicies cannot be changed after the Entity is created or after the
Entity is enabled. Others may be changed at any time. The detailed section on each
QosPolicy states when each policy can be changed. If you attempt to change a QosPolicy
after it becomes immutable (because the associated Entity has been created or enabled,
depending on the policy), set_qos() will fail with a return code of
IMMUTABLE_POLICY.
Table 4.2 QosPolicies
QosPolicy Summary
Asynchronous-
Publisher
Configures the mechanism that sends user data in an external middleware thread. See Section 6.4.1.
Batch
Specifies and configures the mechanism that allows RTI Data Distribution Service to collect multiple
user data samples to be sent in a single network packet, to take advantage of the efficiency of sending
larger packets and thus increase effective throughput. See Section 6.5.1.
Database
Various settings and resource limits used by RTI Data Distribution Service to control its internal data-
base. See Section 8.5.1.
DataReaderProtocol
This QosPolicy configures the DDS on-the-network protocol, RTPS. See Section 7.6.1.
DataReader-
ResourceLimits
Various settings that configure how DataReaders allocate and use physical memory for internal
resources. See Section 7.6.2.
DataWriterProtocol
This QosPolicy configures the DDS on-the-network protocol, RTPS. See Section 6.5.2.
DataWriterRe-
sourceLimits
Controls how many threads can concurrently block on a write() call of this DataWriter. Also controls
the number of batches managed by the DataWriter and the instance-replacement kind used by the
DataWriter. See Section 6.5.3.
Deadline
For a DataReader, specifies the maximum expected elapsed time between arriving data samples.
For a DataWriter, specifies a commitment to publish samples with no greater elapsed time between
them.
See Section 6.5.4.
DestinationOrder
Controls how RTI Data Distribution Service will deal with data sent by multiple DataWriters for the
same topic. Can be set to "by reception timestamp" or to "by source timestamp". See Section 6.5.5.
Discovery
Configures the mechanism used by RTI Data Distribution Service to automatically discover and connect
with new remote applications. See Section 8.5.2.

Chapter 4
4-14
DiscoveryConfig
Controls the amount of delay in discovering entities in the system and the amount of discovery traffic
in the network. See Section 8.5.3.
DomainParticipant-
ResourceLimits
Various settings that configure how DomainParticipants allocate and use physical memory for internal
resources, including the maximum sizes of various properties. See Section 8.5.4.
Durability
Specifies whether or not RTI Data Distribution Service will store and deliver data that were previously
published to new DataReaders. See Section 6.5.6.
DurabilityService
Various settings to configure the external Persistence Service used by RTI Data Distribution Service for
DataWriters with a Durability QoS setting of Persistent Durability. See Section 6.5.7.
EntityFactory
Controls whether or not child entities are created in the enabled state. See Section 6.4.2.
EntityName
Assigns a name to a DomainParticipant. See Section 8.5.5.
Event
Configures the DomainParticipant’s internal thread that handles timed events. See Section 8.5.6.
ExclusiveArea
Configures multi-thread concurrency and deadlock prevention capabilities. See Section 6.4.3.
GroupData
Along with TOPIC_DATA QosPolicy (Section 5.2.1) and USER_DATA QosPolicy (Section 6.5.23), this
QosPolicy is used to attach a buffer of bytes to RTI Data Distribution Service's discovery meta-data. See
6.4.4.
History
Specifies how much data must to stored by RTI Data Distribution Servicefor the DataWriter or
DataReader. This QosPolicy affects the RELIABILITY QosPolicy (Section 6.5.17) as well as the DURA-
BILITY QosPolicy (Section 6.5.6). See Section 6.5.8.
LatencyBudget
Suggestion to DDS on how much time is allowed to deliver data. See Section 6.5.9.
Lifespan
Specifies how long RTI Data Distribution Service should consider data sent by an user application to be
valid. See Section 6.5.10.
Liveliness
Specifies and configures the mechanism that allows
DataReaders to detect when DataWriters become
disconnected or "dead." See Section 6.5.11.
MultiChannel
Configures a DataWriter’s ability to send data on different multicast groups (addresses) based on the
value of the data. See Section 6.5.12.
Ownership
Along with Ownership Strength, specifies if DataReaders for a topic can receive data from multiple
DataWriters at the same time. See Section 6.5.13.
OwnershipStrength
Used to arbitrate among multiple DataWriters of the same instance of a Topic when Ownership
QoSPolicy is EXLUSIVE. See Section 6.5.14.
Partition
Adds string identifiers that are used for matching DataReaders and DataWriters for the same Topic. See
Section 6.4.5.
Presentation
Controls how DDS presents data received by an application to the DataReaders of the data. See
Section 6.4.6.
Table 4.2 QosPolicies
QosPolicy Summary
4.2 QosPolicies
4-15
4. DDS Entities
Profile
Configures the way that XML documents containing QoS profiles are loaded by RTI. See Section 8.4.1.
Property
Stores name/value(string) pairs that can be used to configure certain parameters of RTI Data Distribu-
tion Service that are not exposed through formal QoS policies. It can also be used to store and propa-
gate application-specific name/value pairs, which can be retrieved by user code during discovery. See
Section 6.5.15.
PublishMode
Specifies how RTI Data Distribution Service sends application data on the network. By default, data is
sent in the user thread that calls the DataWriter’s write() operation. However, this QosPolicy can be
used to tell RTI Data Distribution Service to use its own thread to send the data. See Section 6.5.16.
ReaderDataLife-
Cycle
Controls how a DataReader manages the lifecycle of the data that it has received. See Section 7.6.3.
ReceiverPool
Configures threads used by RTI Data Distribution Service to receive and process data from transports
(for example, UDP sockets). See Section 8.5.7.
Reliability
Specifies whether or not DDS will deliver data reliably. See Section 6.5.17.
ResourceLimits
Controls the amount of physical memory allocated for DDS entities, if dynamic allocations are
allowed, and how they occur. Also controls memory usage among different instance values for keyed
topics. See Section 6.5.18.
SystemResource-
Limits
Configures DomainParticipant-independent resources used by RTI Data Distribution Service. Mainly
used to change the maximum number of DomainParticipants that can be created within a single process
(address space). See Section 8.4.2.
TimeBasedFilter
Set by a DataReader to limit the number of new data values received over a period of time. See
Section 7.6.4.
TopicData
Along with Group Data QosPolicy and User Data QosPolicy, used to attach a buffer of bytes to RTI
Data Distribution Service's discovery meta-data. See Section 5.2.1.
TransportBuiltin
Specifies which built-in transport plugins are used. See Section 8.5.8.
TransportMulticast
Specifies the multicast address on which a DataReader wants to receive its data. Can specify a port
number as well as a subset of the available transports with which to receive the multicast data. See
Section 7.6.5.
TransportPriority
Set by a DataWriter to tell DDS that the data being sent is a different "priority" than other data. See
Section 6.5.19.
TransportSelection
Allows you to select which physical transports a DataWriter or DataReader may use to send or receive
its data. See Section 6.5.20.
TransportUnicast
Specifies a subset of transports and port number that can be used by an Entity to receive data. See
Section 6.5.21.
TypeSupport
Used to attach application-specific value(s) to a DataWriter or DataReader. These values are passed to
the serialization or deserialization routine of the associated data type. See Section 6.5.22.
Table 4.2 QosPolicies
QosPolicy Summary

Chapter 4
4-16
4.2.1 QoS Requested vs. Offered Compatibility—the RxO Property
Some QosPolicies that apply to entities on the sending and receiving sides must have
their values set in a compatible manner. This is known as the policy’s ‘requested vs.
offered’ (RxO) property. Entities on the publishing side ‘offer’ to provide a certain
behavior. Entities on the subscribing side ‘request’ certain behavior. For RTI Data Distri-
bution Service to connect the sending entity to the receiving entity, the offered behavior
must satisfy the requested behavior.
For some QosPolicies, the allowed values may be graduated in a way that the offered
value will satisfy the requested value if the offered value is either greater than or less
than the requested value. For example, if a DataWriter’s DEADLINE QosPolicy specifies
a duration less than or equal to a DataReader’s DEADLINE QosPolicy, then the
DataWriter is promising to publish data at least as fast or faster than the DataReader
requires new data to be received. This is a compatible situation (see Section 6.5.4
).
Other QosPolicies require the values on the sending side and the subscribing side to be
exactly equal for compatibility to be met. For example, if a DataWriter’s OWNERSHIP
QosPolicy is set to SHARED, and the matching DataReader’s value is set to EXCLUSIVE,
then this is an incompatible situation since the DataReader and DataWriter have different
expectations of what will happen if more than one DataWriter publishes an instance of
the Topic (see OWNERSHIP QosPolicy (Section 6.5.13)).
Finally there are QosPolicies that do not require compatibility between the sending
entity and the receiving entity, or that only apply to one side or the other. Whether or
not related entities on the publishing and subscribing sides must use compatible set-
tings for a QosPolicy is indicated in the policy’s RxO property, which is provided in the
detailed section on each QosPolicy.
RxO = YES The policy is set at both the publishing and subscribing ends and the values
must be set in a compatible manner. What it means to be compatible is defined by
the QosPolicy.
UserData
Along with Topic Data QosPolicy and Group Data QosPolicy, used to attach a buffer of bytes to RTI
Data Distribution Service's discovery meta-data. See Section 6.5.23.
WireProtocol
Specifies IDs used by the RTPS wire protocol to create globally unique identifiers. See Section 8.5.9.
WriterDataLifeCy-
cle
Controls how a DataWriter handles the lifecycle of the instances (keys) that the DataWriter is registered
to manage. See Section 6.5.24.
Table 4.2 QosPolicies
QosPolicy Summary

4.2 QosPolicies
4-17
4. DDS Entities
RxO = NO The policy is set only on one end or at both the publishing and subscribing
ends, but the two settings are independent. There the requested vs. offered
semantics are not used for these QosPolicies.
For those QosPolicies that follow the RxO semantics, RTI Data Distribution Service will
compare the values of those policies for compatibility. If they are compatible, then RTI
Data Distribution Service will connect the sending entity to the receiving entity allowing
data to be sent between them. If they are found to be incompatible, then RTI Data Distri-
bution Service will not interconnect the entities preventing data to be sent between them.
In addition, RTI Data Distribution Service will record this event by changing the associ-
ated communication status in both the sending and receiving applications, see Types of
Communication Status (Section 4.3.1). Also, if you have installed Listeners on the associ-
ated Entities, then RTI Data Distribution Service will invoke the associated callback func-
tions to notify user code that an incompatible QoS combination has been found, see
Types of Listeners (Section 4.4.1).
For Publishers and DataWriters, the status corresponding to this situation is
OFFERED_INCOMPATIBLE_QOS_STATUS. For Subscribers and DataReaders, the cor-
responding status is REQUESTED_INCOMPATIBLE_QOS_STATUS. The question of
why a DataReader is not receiving data sent from a matching DataWriter can often be
answered if you have instrumented the application with Listeners for the statuses noted
previously.
4.2.2 Special QosPolicy Handling Considerations for C
Many QosPolicy structures contain variable-length sequences to store their parameters.
In the C++, C++/CLI, C# and Java languages, the memory allocation related to
sequences are handled automatically through constructors/destructors and overloaded
operators. However, the C language is limited in what it provides to automatically han-
dle memory management. Thus, RTI Data Distribution Service provides functions and
macros in C to initialize, copy, and finalize (free) QosPolicy structures defined for Enti-
ties.
In the C language, it is not safe to use an Entity’s QosPolicy structure declared in user
code unless it has been initialized first. In addition, user code should always finalize an
Entity’s QosPolicy structure to release any memory allocated for the sequences–even if
the Entity’s QosPolicy structure was declared as a local, stack variable.
Thus, for a general Entity’s QosPolicy, RTI Data Distribution Service will provide:
❏ DDS_<Entity>Qos_INITIALIZER This is a macro that should be used when a
DDS_<Entity>Qos structure is declared in a C application.
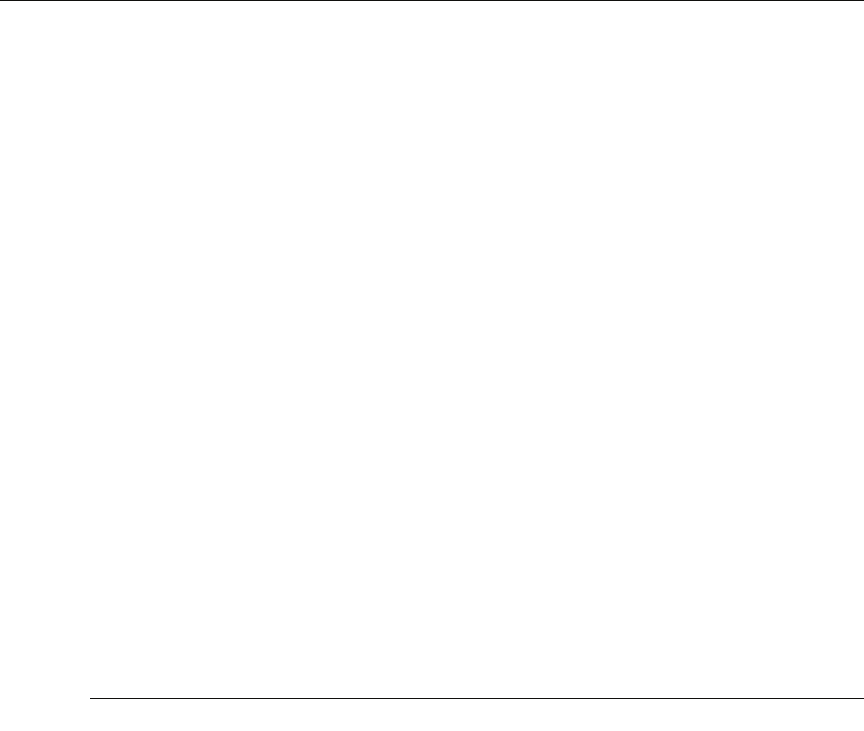
Chapter 4
4-18
struct DDS_<Entity>Qos qos = DDS_<Entity>Qos_INITIALIZER;
❏ DDS_<Entity>Qos_initialize() This is a function that can be used to initialize a
DDS_<Entity>Qos structure instead of the macro above.
struct DDS_<Entity>Qos qos;
DDS_<Entity>QOS_initialize(&qos);
❏ DDS_<Entity>Qos_finalize() This is a function that should be used to finalize a
DDS_<Entity>Qos structure when the structure is no longer needed. It will free
any memory allocated for sequences contained in the structure.
struct DDS_<Entity>Qos qos = DDS_<Entity>Qos_INITIALIZER;
...
<use qos>
...
// now done with qos
DDS_<Entity>QoS_finalize(&qos);
❏ DDS<Entity>Qos_copy() This is a function that can be used to copy one
DDS_<Entity>Qos structure to another. It will copy the sequences contained in
the source structure and allocate memory for sequence elements if needed. In the
code below, both dstQos and srcQos must have been initialized at some point
earlier in the code.
DDS_<Entity>QOS_copy(&dstQos, &srcQos);
4.3 Statuses
This section describes the different statuses that exist for an entity. A status represents a
state or an event regarding the entity. For instance, maybe RTI Data Distribution Service
found a matching DataReader for a DataWriter, or new data has arrived for a DataReader.
Your application can retrieve an Entity’s status by:
❏ explicitly checking for any status changes with get_status_changes().
❏ explicitly checking a specific status with get_<statusname>_status().
❏ using a Listener, which provides asynchronous notification when a status
changes.

4.3 Statuses
4-19
4. DDS Entities
❏ using StatusConditions and WaitSets, which provide a way to wait for status
changes.
If you want your application to be notified of status changes asynchronously: create and
install a Listener for the Entity. Then internal RTI Data Distribution Service threads will
call the listener methods when the status changes. See Listeners (Section 4.4).
If you want your application to wait for status changes: set up StatusConditions to indi-
cate the statuses of interest, attach the StatusConditions to a WaitSet, and then call the
WaitSet’s wait() operation. The call to wait() will block until statuses in the attached
Conditions changes (or until a timeout period expires). See Conditions and WaitSets (Sec-
tion 4.6).
This section includes the following:
❏ Types of Communication Status (Section 4.3.1)
❏ Special Status-Handling Considerations for C (Section 4.3.2)
4.3.1 Types of Communication Status
Each Entity is associated with a set of Status objects representing the “communication
status” of that Entity. The list of statuses actively monitored by RTI Data Distribution Ser-
vice is provided in Table 4.3 on page 4-20. A status structure contains values that give
you more information about the status; for example, how many times the event has
occurred since the last time the user checked the status, or how many time the event has
occurred in total.
Changes to status values cause activation of corresponding StatusCondition objects and
trigger invocation of the corresponding Listener functions to asynchronously inform the
application that the status has changed. For example, a change in a Topic’s
INCONSISTENT_TOPIC_STATUS may trigger the To pi cL is te ne r ’s
on_inconsistent_topic() callback routine (if such a Listener is installed).
Statuses can be grouped into two categories:
❏ Plain communication status: In addition to a flag that indicates whether or not a
status has changed, a plain communication status also contains state and thus has
a corresponding structure to hold its current value.
❏ Read communication status: A read communication status is more like an event
and has no state other than whether or not it has occurred. Only two statuses
listed in Table 4.3 are read communications statuses: D ATA _ AVA I L A B L E and
DATA_ON_READERS.

Chapter 4
4-20
Table 4.3 Communication Statuses
Related
Entity
Status (DDS_*_STATUS) Description Reference
Topic INCONSISTENT_TOPIC
Another To pi c exists with the same name but
different characteristics–for example a differ-
ent type.
Section 5.3.1
Data-
Writer
DATA_WRITER_CACHE
The status of the DataWriter’s cache.
This status does not have a Listener.
Section 6.3.5.1
DATA_WRITER_PROTOCOL
The status of a DataWriter’s internal protocol
related metrics (such as the number of sam-
ples pushed, pulled, filtered) and the status
of wire protocol traffic.
This status does not have a Listener.
Section 6.3.5.2
LIVELINESS_LOST
The liveliness that the DataWriter has com-
mitted to (through its Liveliness QosPolicy)
was not respected (assert_liveliness() or
write() not called in time), thus DataReader
entities may consider the DataWriter as no
longer active.
Section 6.3.5.3
OFFERED_DEADLINE_
MISSED
The deadline that the DataWriter has com-
mitted through its Deadline QosPolicy was
not respected for a specific instance of the
Topic.
Section 6.3.5.4
OFFERED_INCOMPATIBLE_
QOS
An offered QosPolicy value was incompati-
ble with what was requested by a DataReader
of the same Topic.
Section 6.3.5.5
PUBLICATION_MATCHED
The DataWriter found a DataReader that
matches the Topic, has compatible QoSs and
a common partition, or a previously matched
DataReader has been deleted.
Section 6.3.5.6
RELIABLE_WRITER_
CACHE_CHANGED
The number of unacknowledged samples in
a reliable DataWriter's cache has reached one
of the predefined trigger points.
Section 6.3.5.7
RELIABLE_READER_
ACTIVITY_CHANGED
One or more reliable DataReaders has either
been discovered, deleted, or changed
between active and inactive state as specified
by the LivelinessQosPolicy of the DataReader.
Section 6.3.5.8

4.3 Statuses
4-21
4. DDS Entities
As mentioned in Section 4.1.4, all entities have a get_status_changes() operation that
can be used to explicitly poll for changes in any status related to the entity. For plain sta-
tuses, each entry has operations to get the current value of the status; for example, the
Topic class has a get_inconsistent_topic_status() operation. For read statuses, your appli-
Subscriber DATA_ON_READERS
New data is available for any of the readers
that were created from the Subscriber.
Section 7.2.8
Data-
Reader
DATA_AVAILABLE
New data (one or more samples) are avail-
able for the specific DataReader.
Section 7.3.6.1
DATA_READER_CACHE
The status of the reader's cache.
This status does not have a Listener.
Section 7.3.6.2
DATA_READER_PROTOCOL
The status of a DataReader’s internal protocol
related metrics (such as the number of sam-
ples received, filtered, rejected) and the sta-
tus of wire protocol traffic.
This status does not have a Listener.
Section 7.3.6.3
LIVELINESS_CHANGED
The liveliness of one or more DataWriters
that were writing instances read by the
DataReader has either been discovered,
deleted, or changed between active and inac-
tive state as specified by the Liveli-
nessQosPolicy of the DataWriter.
Section 7.3.6.4
REQUESTED_DEADLINE_
MISSED
New data was not received for an instance of
the Topic within the time period set by the
DataReader’s Deadline QosPolicy.
Section 7.3.6.5
REQUESTED_
INCOMPATIBLE_QOS
A requested QosPolicy value was incompati-
ble with what was offered by a DataWriter of
the same Topic.
Section 7.3.6.6
SAMPLE_LOST
A sample sent by RTI Data Distribution Ser-
vice has been lost (never received).
Section 7.3.6.7
SAMPLE_REJECTED
A received sample has been rejected due to a
resource limit (buffers filled).
Section 7.3.6.8
SUBSCRIPTION_MATCHED
The DataReader has found a DataWriter that
matches the Topic, has compatible QoSs and
a common partition, or an existing matched
DataWriter has been deleted.
Section 7.3.6.9
Table 4.3 Communication Statuses
Related
Entity
Status (DDS_*_STATUS) Description Reference

Chapter 4
4-22
cation should use the take() operation on the DataReader to retrieve the newly arrived
data that is indicated by D ATA _ AVA I L A B L E and DATA_ON_READER.
Note that the two read communication statuses do not change independently. If data
arrives for a DataReader, then its D ATA _ AVA I L A B L E status changes. At the same time,
the DATA_ON_READERS status changes for the DataReader’s Subscriber.
Both types of status have a StatusChangedFlag. This flag indicates whether that particu-
lar communication status has changed since the last time the status was read by the
application. The way the StatusChangedFlag is maintained is slightly different for the
plain communication status and the read communication status, as described in the fol-
lowing sections:
❏ Changes in Plain Communication Status (Section 4.3.1.1)
❏ Changes in Read Communication Status (Section 4.3.1.2)
4.3.1.1 Changes in Plain Communication Status
As seen in Figure 4.1 on page 4-22, for the plain communication status, the Sta-
tusChangedFlag flag is initially set to FALSE. It becomes TRUE whenever the plain
communication status changes and is reset to FALSE each time the application accesses
the plain communication status via the proper get_<plain communication status>()
operation.
The communication status is also reset to FALSE whenever the associated listener oper-
ation is called, as the listener implicitly accesses the status which is passed as a parame-
ter to the operation.
The fact that the status is reset prior to calling the listener means that if the application
calls the get_<plain communication status>() operation from inside the listener, it will
see the status already reset.
Figure 4.1 Status Changes for Plain Communication Status
StatusChangedFlag = FALSE StatusChangedFlag = TRUE
status changes
User calls get_*_status(), or
after listener is invoked

4.3 Statuses
4-23
4. DDS Entities
An exception to this rule is when the associated listener is the 'nil' listener. The 'nil' lis-
tener is treated as a NO-OP and the act of calling the 'nil' listener does not reset the com-
munication status. (See Types of Listeners (Section 4.4.1).)
For example, the value of the StatusChangedFlag associated with the
REQUESTED_DEADLINE_MISSED status will become TRUE each time new deadline
occurs (which increases the RequestedDeadlineMissed status’ total_count field). The
value changes to FALSE when the application accesses the status via the corresponding
get_requested_deadline_missed_status() operation on the proper Entity.
4.3.1.2 Changes in Read Communication Status
As seen in Figure 4.2 on page 4-25, for the read communication status, the Sta-
tusChangedFlag flag is initially set to FALSE. The StatusChangedFlag becomes TRUE
when either a data sample arrives or else the ViewStateKind, SampleStateKind, or
InstanceStateKind of any existing sample changes for any reason other than a call to one
of the read/take operations. Specifically, any of the following events will cause the Sta-
tusChangedFlag to become TRUE:
❏ The arrival of new data.
❏ A change in the InstanceStateKind of a contained instance. This can be caused by
either:
• Notification that an instance has been disposed by:
• the DataWriter that owns it, if OWNERSHIP = EXCLUSIVE
• or by any DataWriter, if OWNERSHIP = SHARED
• The loss of liveliness of the DataWriter of an instance for which there is no
other DataWriter.
• The arrival of the notification that an instance has been unregistered by the
only DataWriter that is known to be writing the instance.
Depending on the kind of StatusChangedFlag, the flag transitions to FALSE again as
follows:
❏ The D ATA _ AVA I L A B L E StatusChangedFlag becomes FALSE when either
on_data_available() is called or the read/take operation (or their variants) is
called on the associated DataReader.

Chapter 4
4-24
❏ The DATA_ON_READERS StatusChangedFlag becomes FALSE when any of
the following occurs:
• on_data_on_readers() is called.
• on_data_available() is called on any DataReader belonging to the Sub-
scriber.
• One of the read/take operations (or their variants) is called on any
DataReader belonging to the Subscriber.
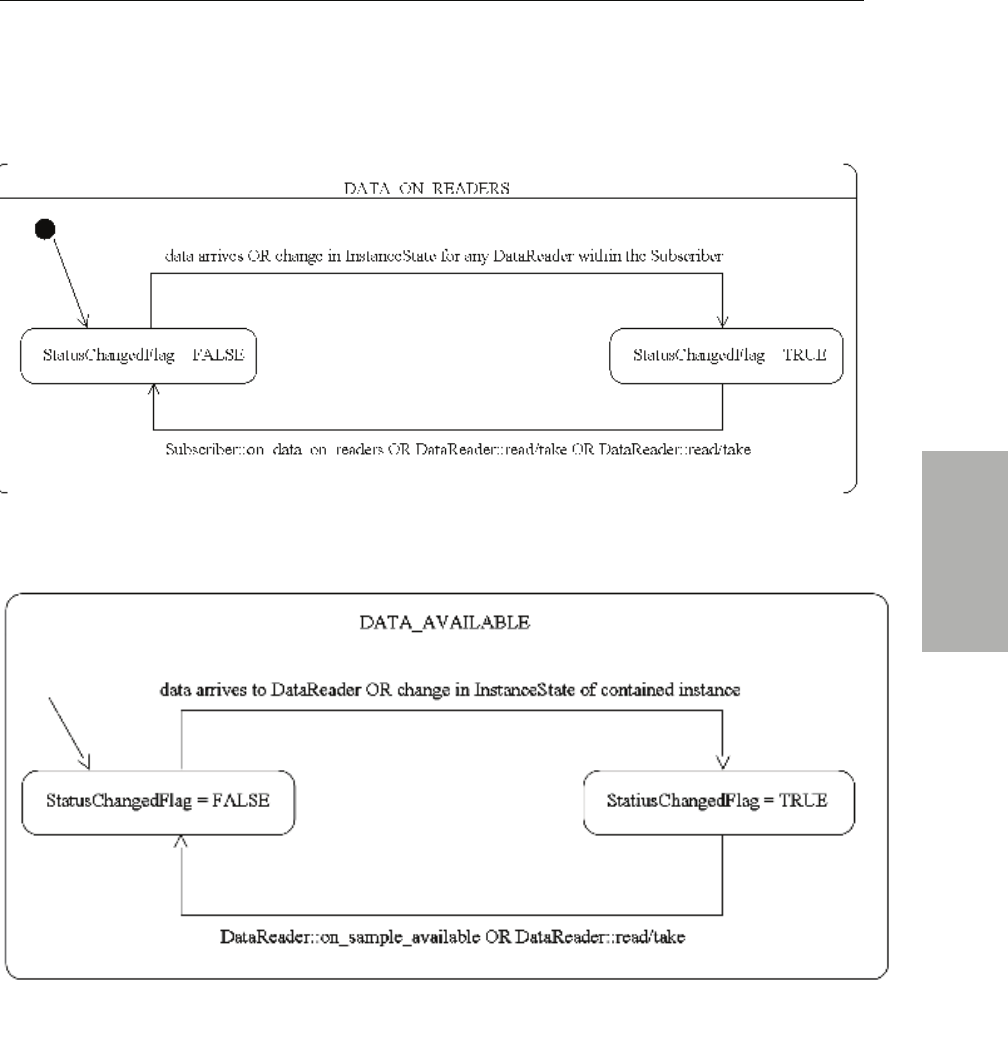
4.3 Statuses
4-25
4. DDS Entities
Figure 4.2 Status Changes for Read Communication Status

Chapter 4
4-26
4.3.2 Special Status-Handling Considerations for C
Some status structures contain variable-length sequences to store their values. In the
C++, C++/CLI, C# and Java languages, the memory allocation related to sequences are
handled automatically through constructors/destructors and overloaded operators.
However, the C language is limited in what it provides to automatically handle memory
management. Thus, RTI Data Distribution Service provides functions and macros in C to
initialize, copy, and finalize (free) status structures.
In the C language, it is not safe to use a status structure that has internal sequences
declared in user code unless it has been initialized first. In addition, user code should
always finalize a status structure to release any memory allocated for the sequences–
even if the status structure was declared as a local, stack variable.
Thus, for a general status structure, RTI Data Distribution Service will provide:
❏ DDS_<STATUS>STATUS_INITIALIZER This is a macro that should be used
when a DDS_<Status>Status structure is declared in a C application.
struct DDS_<Status>Status status =
DDS_<Status>Status_INITIALIZER;
❏ DDS_<Status>Status_initialize() This is a function that can be used to initialize
a DDS_<Status>Status structure instead of the macro above.
struct DDS_<Status>Status status;
DDS_<Status>Status_initialize(&Status);
❏ DDS_<Status>Status_finalize() This is a function that should be used to finalize
a DDS_<Status>Status structure when the structure is no longer needed. It will
free any memory allocated for sequences contained in the structure.
struct DDS_<Status>Status status =
DDS_<Status>Status_INITIALIZER;
...
<use status>
...
// now done with Status
DDS_<Status>Status_finalize(&status);

4.4 Listeners
4-27
4. DDS Entities
❏ DDS<Status>Status_copy() This is a function that can be used to copy one
DDS_<Status>Status structure to another. It will copy the sequences contained
in the source structure and allocate memory for sequence elements if needed. In
the code below, both dstStatus and srcStatus must have been initialized at some
point earlier in the code.
DDS_<Status>Status_copy(&dstStatus, &srcStatus);
Note that many status structures do not have sequences internally. For those structures,
you do not need to use the macro and methods provided above. However, they have
still been created for your convenience.
4.4 Listeners
This section describes Listeners and how to use them.
Listeners are triggered by changes in an entity’s status. For instance, maybe RTI Data Dis-
tribution Service found a matching DataReader for a DataWriter, or new data has arrived
for a DataReader.
This section includes:
❏ Types of Listeners (Section 4.4.1)
❏ Creating and Deleting Listeners (Section 4.4.2)
❏ Special Considerations for Listeners in C (Section 4.4.3)
❏ Hierarchical Processing of Listeners (Section 4.4.4)
❏ Operations Allowed within Listener Callbacks (Section 4.4.5)
4.4.1 Types of Listeners
The Listener class is the abstract base class for all listeners. Each entity class (DomainPar-
ticipant, Topic, Publisher, DataWriter, Subscriber, and DataReader) has its own derived Lis-
tener class that add methods for handling entity-specific statuses. The hierarchy of
Listener classes is presented in Figure 4.3. The methods are called by an internal RTI Data
Distribution Service thread when the corresponding status for the Entity changes value.
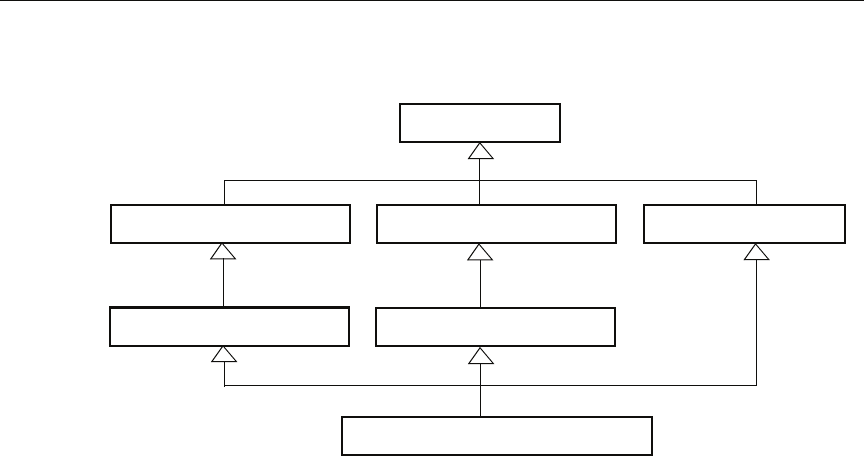
Chapter 4
4-28
You can choose which changes in status will trigger a callback by installing a listener
with a bit-mask. Bits in the mask correspond to different statuses. The bits that are true
indicate that the listener will be called back when there are changes in the correspond-
ing status.
You can specify a listener and set its bit-mask before or after you create an Entity:
During Entity creation:
DDS_StatusMask mask = DDS_REQUESTED_DEADLINE_MISSED_STATUS |
DDS_DATA_AVAILABLE_STATUS;
datareader = subscriber->create_datareader(topic,
DDS_DATAREADER_QOS_DEFAULT,
listener, mask);
or afterwards:
DDS_StatusMask mask = DDS_REQUESTED_DEADLINE_MISSED_STATUS |
DDS_DATA_AVAILABLE_STATUS;
datareader->set_listener(listener, mask);
As you can see in the above examples, there are two components involved when setting
up listeners: the listener itself and the mask. Both of these can be null. Table 4.4
describes what happens when a status change occurs. See Hierarchical Processing of
Listeners (Section 4.4.4) for more information.
DDSListener
DDSDataReaderListener DDSDataWriterListener DDSTopicListener
DDSDomainParticipantListener
DDSSubscriberListener
DDSPublisherListener
Figure 4.3 DDS Listener Class Hierarchy

4.4 Listeners
4-29
4. DDS Entities
4.4.2 Creating and Deleting Listeners
There is no factory for creating or deleting a Listener; use the natural means in each lan-
guage binding (for example, “new” or “delete” in C++ or Java). For example:
class HelloWorldListener : public DDSDataReaderListener {
virtual void on_data_available(DDSDataReader* reader);
};
void HelloWorldListener::on_data_available(DDSDataReader* reader)
{
printf("received data\n");
}
// Create a Listener
HelloWorldListener *reader_listener = NULL;
reader_listener = new HelloWorldListener();
// Delete a Listener
delete reader_listener;
A listener cannot be deleted until the entity it is attached to has been deleted. For exam-
ple, you must delete the DataReader before deleting the DataReader’s listener.
Note: Due to a thread-safety issue, the destruction of a DomainParticipantListener from
an enabled DomainParticipant should be avoided—even if the DomainParticipantListener
has been removed from the DomainParticipant. (This limitation does not affect the Java
API.)
Table 4.4 Effect of Different Combinations of Listeners and Status Bit Masks
No Bits Set in Mask Some/All Bits Set in Mask
Listener is
Specified
RTI Data Distribution Service finds the
next most relevant listener for the
changed status.
For the statuses that are enabled in
the mask, the most relevant listener
will be called.
The 'statusChangedFlag' for the rele-
vant status is reset.
Listener is
NULL
RTI Data Distribution Service behaves
as if the listener is not installed and
finds the next most relevant listener
for that status.
For the statuses that are enabled in
the mask, RTI Data Distribution Service
behaves as if the listener callback is
installed, but the callback is doing
nothing. This is called a ‘nil’ listener.
The 'statusChangedFlag' for the rele-
vant status is not reset.

Chapter 4
4-30
4.4.3 Special Considerations for Listeners in C
In C, a Listener is a structure with function pointers to the user callback routines. Often,
you may only be interested in a subset of the statuses that can be monitored with the Lis-
tener. In those cases, you may not set all of the functions pointers in a listener structure
to a valid function. In that situation, we recommend that the unused, callback-function
pointers are set to NULL. While setting the DDS_StatusMask to enable only the call-
backs for the statuses in which you are interested (and thus only enabling callbacks on
the functions that actually exist) is safe, we still recommend that you clear all of the
unused callback pointers in the Listener structure.
To help, in the C language, we provide a macro that can be used to initialize a Listener
structure so that all of its callback pointers are set to NULL. For example
DDS_<Entity>Listener listener = DDS_<Entity>Listener_INITIALIZER;
// now only need to set the listener callback pointers for statuses
// to be monitored
There is no need to do this in languages other than C.
4.4.4 Hierarchical Processing of Listeners
As seen in Figure 4.3 on page 4-28, DDS Listeners for some entities derive from the DDS
Listeners for related entities. This means that the derived Listener has all of the methods
of its parent class. You can install Listeners at all levels of the object hierarchy. At the top
is the DomainParticipantListener; only one can be installed in a DomainParticipant. Then
every Subscriber and Publisher can have their own Listener. Finally, each Topic, DataReader
and DataWriter can have their own listeners. All are optional.
Suppose, however, that an Entity does not install a Listener, or installs a Listener that does
not have particular communication status selected in the bitmask. In this case, if/when
that particular status changes for that Entity, the corresponding Listener for that Entity’s
parent is called. Status changes are “propagated” from child Entity to parent Entity until
a Listener is found that is registered for that status. RTI Data Distribution Service will give
up and drop the status-change event only if no Listeners have been installed in the object
hierarchy to be called back for the specific status. This is true for plain communication
statuses. Read communication statuses are handle somewhat differently, see Processing
Read Communication Statuses (Section 4.4.4.1).
For example, suppose that RTI Data Distribution Service finds a matching DataWriter for
a local DataReader. This event will change the SUBSCRIPTION_MATCHED status. So
the local DataReader object is checked to see if the application has installed a listener that
handles the SUBSCRIPTION_MATCH status. If not, the Subscriber that created the
DataReader is checked to see if it has a listener installed that handles the same event. If

4.4 Listeners
4-31
4. DDS Entities
not, the DomainParticipant is checked. The DomainParticipantListener methods are called
only if none of the descendent entities of the DomainParticipant have listeners that han-
dle the particular status that has changed. Again, all listeners are optional. Your applica-
tion does not have to handle any communication statuses.
Table 4.5 lists the callback functions that are available for each Entity’s status listener.
4.4.4.1 Processing Read Communication Statuses
The processing of the DATA_ON_READERS and D ATA _ AVA I L A B L E read communi-
cation statuses are handled slightly differently since, when new data arrives for a
DataReader, both statuses change simultaneously. However, only one, if any, Listener will
be called to handle the event.
If there is a Listener installed to handle the DATA_ON_READERS status in the
DataReader’s Subscriber or in the DomainParticipant, then that Listener’s
on_data_on_readers() function will be called back. The DataReaderListener’s
on_data_available() function is called only if the DATA_ON_READERS status is not
handle by any relevant listeners.
Table 4.5 DDS Listener Callback Functions
Entity Listener for: Callback Functions
DomainParticipants
Topics on_inconsistent_topic()
Publishers and DataWriters
on_liveliness_lost()
on_offered_deadline_missed()
on_offered_incompatible_qos()
on_publication_matched()
on_reliable_reader_activity_changed()
on_reliable_writer_cache_changed()
Subscribers on_data_on_readers()
Subscribers and DataReaders
on_data_available
on_liveliness_changed()
on_requested_deadline_missed()
on_requested_incompatible_qos()
on_sample_lost()
on_sample_rejected()
on_subscription_matched()

Chapter 4
4-32
This can be useful if you have generic processing to do whenever new data arrives for
any DataReader. You can execute the generic code in the on_data_on_readers() method,
and then dispatch the processing of the actual data to the specific DataReaderListener’s
on_data_available() function by calling the notify_datareaders() method on the Sub-
scriber.
For example:
void on_data_on_readers (DDSSubscriber *subscriber)
{
// Do some general processing that needs to be done
// whenever new data arrives, but is independent of
// any particular DataReader
< generic processing code here >
// Now dispatch the actual processing of the data
// to the specific DataReader for which the data
// was received
subscriber->notify_datareaders();
}
4.4.5 Operations Allowed within Listener Callbacks
Due to the potential for deadlock, some RTI Data Distribution Service APIs should not be
invoked within the functions of listener callbacks. Exactly which RTI Data Distribution
Service APIs are restricted depends on the Entity upon which the Listener is installed, as
well as the configuration of ‘Exclusive Areas,’ as discussed in Section 4.5.
Please read and understand Exclusive Areas (EAs) (Section 4.5) and Restricted Opera-
tions in Listener Callbacks (Section 4.5.1) to ensure that the calls made from your Listen-
ers are allowed and will not cause potential deadlock situations.
4.5 Exclusive Areas (EAs)
Listener callbacks are invoked by internal RTI Data Distribution Service threads. To pre-
vent undesirable, multi-threaded interaction, the internal threads may take and hold
semaphores (mutexes) used for mutual exclusion. In your listener callbacks, you may
want to invoke functions provided by the RTI Data Distribution Service API. Internally,

4.5 Exclusive Areas (EAs)
4-33
4. DDS Entities
those RTI Data Distribution Service functions also may take mutexes to prevent errors
due to multi-threaded access to critical data or operations.
Once there are multiple mutexes to protect different critical regions, the possibility for
deadlock exists. Consider Figure 4.4’s scenario, in which there are two threads and two
mutexes.
While the probability of entering the deadlock situation in Figure 4.4 depends on execu-
tion timing, when there are multiple threads and multiple mutexes, care must be taken
in writing code to prevent those situations from existing in the first place. RTI Data Dis-
tribution Service has been carefully created and analyzed so that we know our threads
internally are safe from deadlock interactions.
However, when RTI Data Distribution Service threads that are holding mutexes call user
code in listeners, it is possible for user code to inadvertently cause the threads to dead-
lock if RTI Data Distribution Service APIs that try to take other mutexes are invoked. To
help you avoid this situation, RTI has defined a concept known as Exclusive Areas, some
restrictions regarding the use of RTI Data Distribution Service APIs within user callback
code, and a QoS policy that allows you to configure Exclusive Areas.
RTI Data Distribution Service uses Exclusive Areas (EAs) to encapsulate mutexes and criti-
cal regions. Only one thread at a time can be executing code within an EA. The formal
definition of EAs and their implementation ensures safety from deadlock and efficient
entering and exiting of EAs. While every Entity created by RTI Data Distribution Service
Thread1 Thread2
take(MutexA)
take(MutexB)
take(MutexB)
take(MutexA)
Deadlock!
XX
Figure 4.4 Multiple Mutexes Leading to a Deadlock Condition
Thread1 takes MutexA while simultaneously Thread2 takes MutexB. Then, Thread1 takes
MutexB and simultaneously Thread2 takes MutexA. Now both threads are blocked since they hold
a mutex that the other thread is trying to take. This is a deadlock condition.

Chapter 4
4-34
has an associated EA, EAs may be shared among several entities. A thread is automati-
cally in the entity's EA when it is calling the entity’s listener.
RTI Data Distribution Service allows you to configure all the Entities within an applica-
tion in a single domain to share a single Exclusive Area. This would greatly restrict the
concurrency of thread execution within RTI Data Distribution Service’s multi-threaded
core. However, doing so would release all restrictions on using RTI Data Distribution Ser-
vice APIs within your callback code.
You may also have the best of both worlds by configuring a set of Entities to share a
global EA and others to have their own. For the Entities that have their own EAs, the
types of RTI Data Distribution Service operations that you can call from the Entity’s call-
back are restricted.
To understand why the general EA framework limits the operations that can be called in
an EA, consider a modification to the example previously presented in Figure 4.4. Sup-
pose we create a rule that is followed when we write our code. “For all situations in
which a thread has to take multiple mutexes, we write our code so that the mutexes are
always taken in the same order.” Following the rule will ensure us that the code we
write cannot enter a deadlock situation due to the taking of the mutexes, see Figure 4.5.
Thread1 Thread2
take(MutexA)
take(MutexB)
take(MutexA)
take(MutexB)
X
give(MutexB)
give(MutexA)
Figure 4.5 Taking Multiple Mutexes in a Specific Order to Eliminate Deadlock
By creating an order in which multiple mutexes are taken, you can guarantee that no deadlock
situation will arise. In this case, if a thread must take both MutexA and MutexB, we write our
code so that in those cases MutexA is always taken before MutexB.

4.5 Exclusive Areas (EAs)
4-35
4. DDS Entities
RTI Data Distribution Service defines an ordering of the mutexes it creates. Generally
speaking, there are three ordered levels of Exclusive Areas:
❏ ParticipantEA There is only one ParticipantEA per participant. The creation and
deletion of all Entities (create_xxx(), delete_xxx()) take the ParticipantEA. In
addition, the enable() method for an Entity and the setting of the Entity’s QoS,
set_qos(), also take the ParticipantEA
❏ SubscriberEA This EA is created on a per-Subscriber basis by default. You can
assume that the methods of a Subscriber will take the SubscriberEA. In addition,
the DataReaders created by a Subscriber share the EA of its parent. This means that
the methods of a DataReader (including take() and read()) will take the EA of its
Subscriber. Therefore, operations on
DataReaders of the same Subscriber, will be
serialized, even when invoked from multiple concurrent application threads. As
mentioned, the enable() and set_qos() methods of both Subscribers and
DataReaders will take the ParticipantEA. The same is true for the
create_datareader() and delete_datareader() methods of the Subscriber.
❏ PublisherEA This EA is created on a per-Publisher basis by default. You can
assume that the methods of a Publisher will take the PublisherEA. In addition,
the DataWriters created by a Publisher share the EA of its parent. This means that
the methods of a DataWriter including write() will take the EA of its Publisher.
Therefore, operations on
DataWriters of the same Publisher will be serialized,
even when invoked from multiple concurrent application threads. As men-
tioned, the enable() and set_qos() methods of both Publishers and DataWriters
will take the ParticipantEA, as well as the create_datawriter() and
delete_datawriter() methods of the Publisher.
In addition, you should also be aware that:
❏ The three EA levels are ordered in the following manner:
ParticipantEA < SubscriberEA < PublisherEA
❏ When executing user code in a listener callback of an Entity, the internal RTI Data
Distribution Service thread is already in the EA of that Entity or used by that
Entity.
❏ If a thread is in an EA, it can call methods associated with either a higher EA
level or that share the same EA. It cannot call methods associated with a lower
EA level nor ones that use a different EA at the same level.

Chapter 4
4-36
4.5.1 Restricted Operations in Listener Callbacks
Based on the background and rules provided in Exclusive Areas (EAs) (Section 4.5), this
section describes how EAs restrict you from using various RTI Data Distribution Service
APIs from within the Listener callbacks of different Entities.
Note: these restrictions do not apply to builtin topic listener callbacks.
By default, each Publisher and Subscriber creates and uses its own EA, and shares it with
its children DataWriters and DataReaders, respectively. In that case:
Within a DataWriter/DataReader’s Listener callback, do not:
❏ create any entities
❏ delete any entities
❏ enable any entities
❏ set QoS’s on any entities
Within a Subscriber/DataReader’s Listener callback, do not call any operations on:
❏ Other Subscribers
❏ DataReaders that belong to other Subscribers
❏ Publishers/DataWriters that have been configured to use the ParticipantEA (see
below)
Within a Publisher/DataWriter Listener callback, do not call any operations on:
❏ Other Publishers
❏ DataWriters that belong to other Publishers
❏ Any Subscribers
❏ Any DataReaders
RTI Data Distribution Service will enforce the rules to avoid deadlock, and any attempt to
call an illegal method from within a Listener callback will return
DDS_RETCODE_ILLEGAL_OPERATION.
However, as previously mentioned, if you are willing to trade-off concurrency for flexi-
bility, you may configure individual Publishers and Subscribers (and thus their DataWrit-
ers and DataReaders) to share the EA of their participant. In the limit, only a single
ParticipantEA is shared among all Entities. When doing so, the restrictions above are
lifted at a cost of greatly reduced concurrency. You may create/delete/enable/set_qos’s

4.6 Conditions and WaitSets
4-37
4. DDS Entities
and generally call all of the methods of any other entity in the Listener callbacks of Enti-
ties that share the ParticipantEA.
Use the EXCLUSIVE_AREA QosPolicy (DDS Extension) (Section 6.4.3) of the Publisher
or Subscriber to set whether or not to use a shared exclusive area. By default, Publishers
and Subscribers will create and use their own individual EAs. You can configure a subset
of the Publishers and Subscribers to share the ParticipantEA if you need the Listeners
associated with those entities or children entities to be able to call any of the restricted
methods listed above.
Regardless of how the EXCLUSIVE_AREA QosPolicy is set, the following operations
are never allowed in any Listener callback:
❏ Destruction of the entity to which the Listener is attached. For instance, a
DataWriter/DataReader Listener callback must not destroy its DataWriter/
DataReader.
❏ Within the TopicListener callback, you cannot call any operations on DataReaders,
DataWriters, Publishers, Subscribers or DomainParticipants.
4.6 Conditions and WaitSets
Conditions and WaitSets provide another way for RTI Data Distribution Service to commu-
nicate status changes (including the arrival of data) to your application. While a Listener
is used to provide a callback for asynchronous access, Conditions and WaitSets provide
synchronous data access. In other words, Listeners are notification-based and Conditions
are wait-based.
A WaitSet allows an application to wait until one or more attached Conditions becomes
true (or else until a timeout expires).
Briefly, your application can create a WaitSet, attach one or more Conditions to it, then
call the WaitSet’s wait() operation. The wait() blocks until one or more of the WaitSet’s
attached Conditions becomes TRUE.
A Condition has a trigger_value that can be TRUE or FALSE. You can retrieve the current
value by calling the Condition’s only operation, get_trigger_value().

Chapter 4
4-38
There are three kinds of Conditions. A Condition is a root class for all the conditions that
may be attached to a WaitSet. This basic class is specialized in three classes:
❏ GuardConditions (Section 4.6.6) are created by your application. Each GuardCon-
dition has a single, user-settable, boolean trigger_value. Your application can
manually trigger the GuardCondition by calling set_trigger_value(). RTI Data Dis-
tribution Service does not trigger or clear this type of condition—it is completely
controlled by your application.
❏ ReadConditions and QueryConditions (Section 4.6.7) are created by your appli-
cation, but triggered by RTI Data Distribution Service. ReadConditions provide a
way for you to specify the data samples that you want to wait for, by indicating
the desired sample-states, view-states, and instance-states
1
.
❏ StatusConditions (Section 4.6.8) are created automatically by RTI Data Distribu-
tion Service, one for each Entity. A StatusCondition is triggered by RTI Data Distri-
bution Service when there is a change to any of that Entity’s enabled statuses.
Figure 4.6 on page 4-39 shows the relationship between these objects and other Entities
in the system.
A WaitSet can be associated with more than one Entity (including multiple DomainPar-
ticipants). It can be used to wait on Conditions associated with different DomainPartici-
pants. A WaitSet can only be in use by one application thread at a time.
4.6.1 Creating and Deleting WaitSets
There is no factory for creating or deleting a WaitSet; use the natural means in each lan-
guage binding (for example, “new” or “delete” in C++ or Java).
For example, to delete a WaitSet:
delete waitset;
There are two ways to create a WaitSet—with or without specifying WaitSet properties
(DDS_WaitSetProperty_t, described in Table 4.6).
❏ If properties are not specified when the WaitSet is created, the WaitSet will wake
up as soon as a trigger event occurs (that is, when an attached Condition is
becomes true). This is the default behavior if properties are not specified.
This ‘immediate wake-up’ behavior is optimal if you want to minimize latency
(to wake up and process the data or event as soon as possible). However, "wak-
ing up" involves a context switch—the operating system must signal and sched-
1. These states are described in The SampleInfo Structure (Section 7.4.5).

4.6 Conditions and WaitSets
4-39
4. DDS Entities
Figure 4.6 Conditions and WaitSets

Chapter 4
4-40
ule the thread that is waiting on the WaitSet. A context switch consumes
significant CPU and therefore waking up on each data update is not optimal in
situations where the application needs to maximize throughput (the number of
messages processed per second). This is especially true if the receiver is CPU lim-
ited.
To create a WaitSet with default behavior:
WaitSet* waitset = new WaitSet();
❏ If properties are specified when the WaitSet is created, the WaitSet will wait for
either (a) up to max_event_count trigger events to occur, (b) up to
max_event_delay time from the occurrence of the first trigger event, or (c) up to
the timeout maximum wait duration specified in the call to wait().
Table 4.6 WaitSet Properties (DDS_WaitSet_Property_t)
Type Field Name Description
long max_event_count
Maximum number of trigger events to cause a WaitSet
to wake up.
DDS_Duration_t max_event_delay
Maximum delay from occurrence of first trigger event
to cause a WaitSet to wake up.
This value should reflect the maximum acceptable latency
increase (time delay from occurrence of the event to waking up
the waitset) incurred as a result of waiting for additional
events before waking up the waitset.

4.6 Conditions and WaitSets
4-41
4. DDS Entities
To create a WaitSet with properties:
DDS_WaitSetProperty_t prop;
Prop.max_event_count = 5;
DDSWaitSet* waitset = new DDSWaitSet(prop);
4.6.2 WaitSet Operations
WaitSets have only a few operations, as listed in Table 4.7 on page 4-41. For details, see
the online documentation.
4.6.3 Waiting for Conditions
The WaitSet’s wait() operation allows an application thread to wait for any of the
attached Conditions to trigger (become TRUE).
If any of the attached Conditions are already TRUE when wait() is called, it returns
immediately. If none of the attached Conditions are TRUE, wait() blocks—suspending
Table 4.7 WaitSet Operations
Operation Description
attach_condition
Attaches a Condition to this WaitSet.
You may attach a Condition to a WaitSet that is currently being
waited upon (via the wait() operation). In this case, if the Condition
has a trigger_value of TRUE, then attaching the Condition will
unblock the WaitSet.
Adding a Condition that is already attached to the WaitSet has no
effect. If the Condition cannot be attached, RTI Data Distribution Ser-
vice will return an OUT_OF_RESOURCES error code.
detach_condition
Detaches a Condition from the WaitSet. Attempting to detach a Condition
that is not to attached the WaitSet will result in a
PRECONDITION_NOT_MET error code.
wait
Blocks execution of the thread until one or more attached Conditions
becomes true, or until a user-specified timeout expires. See Section 4.6.3.
get_conditions Retrieves a list of attached Conditions.
get_property Retrieves the DDS_WaitSetProperty_t structure of the associated WaitSet.
set_property
Sets the DDS_WaitSetProperty_t structure, to configure the associated Wait-
Set to return after one or more trigger events have occurred.

Chapter 4
4-42
the calling thread. The wait() call will return when either (a) one or more of the attached
Conditions becomes TRUE or (b) a user-specified timeout period expires.
You can also configure the properties of the WaitSet so that it will wait for up to
max_event_count trigger events to occur before returning, or for up to
max_event_delay time from the occurrence of the first trigger event before returning.
See Creating and Deleting WaitSets (Section 4.6.1).
If wait() does not timeout, it returns a list of the attached Conditions that became TRUE
and therefore unblocked the wait.
If wait() does timeout, it returns TIMEOUT and an empty list of Conditions.
Only one application thread can be waiting on the same WaitSet. If wait() is called on a
WaitSet that already has a thread blocking on it, the operation will immediately return
PRECONDITION_NOT_MET.
Note: If you detach a Condition from a Waitset that is currently in a wait state (that is, you
are waiting on it), wait() may return OK and an empty sequence of conditions.
4.6.3.1 How WaitSets Block
The blocking behavior of the WaitSet is illustrated in Figure 4.7. The result of a wait()
operation depends on the state of the WaitSet, which in turn depends on whether at least
one attached Condition has a trigger_value of TRUE.
If the wait() operation is called on a WaitSet with state BLOCKED, it will block the call-
ing thread. If wait() is called on a WaitSet with state UNBLOCKED, it will return imme-
diately.
When the WaitSet transitions from BLOCKED to UNBLOCKED, it wakes up the thread
(if there is one) that had called wait() on it. There is no implied “event queuing” in the
awakening of a WaitSet. That is, if several Conditions attached to the WaitSet have their
trigger_value transition to true in sequence, RTI Data Distribution Service will only
unblock the WaitSet once.
4.6.4 Processing Triggered Conditions—What to do when Wait() Returns
When wait() returns, it provides a list of the attached Condition objects that have a
trigger_value of true. Your application can use this list to do the following for each Con-
dition in the returned list:
❏ If it is a StatusCondition:
• First, call get_status_changes() to see what status changed.
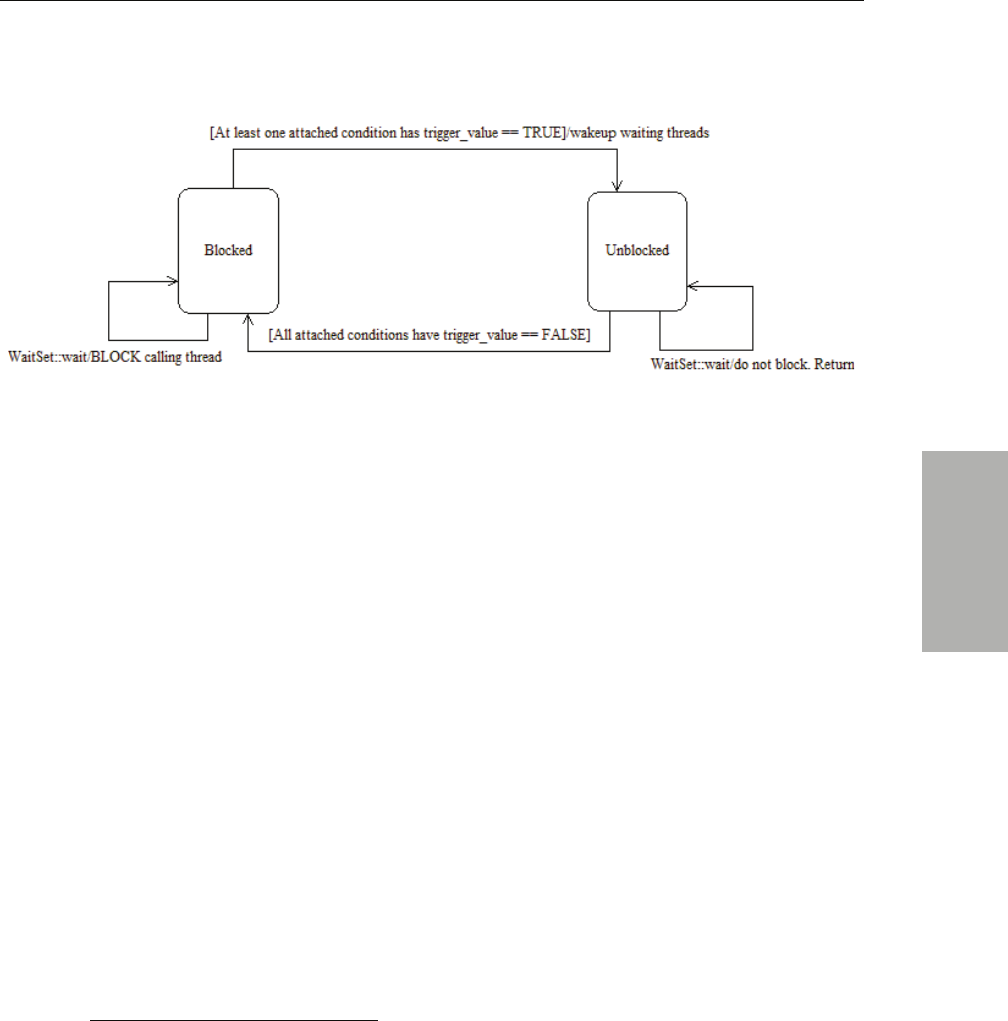
4.6 Conditions and WaitSets
4-43
4. DDS Entities
• If the status changes refer to plain communication status: call
get_<communication_status>() on the relevant Entity.
• If the status changes refer to DATA_ON_READERS
1
: call
get_datareaders() on the relevant Subscriber.
• If the status changes refer to DATA_AVAILABLE: call read() or take() on
the relevant DataReader.
❏ If it is a ReadCondition or a QueryCondition: You may want to call
read_w_condition() or take_w_condition() on the DataReader, with the ReadCon-
dition as a parameter (see
read_w_condition and take_w_condition (Section 7.4.3.6)).
Note that this is just a suggestion, you do not have to use the “w_condition”
operations (or any read/take operations, for that matter) simply because you
used a WaitSet. The “w_condition” operations are just a convenient way to use
the same status masks that were set on the ReadCondition or QueryCondition.
❏ If it is a GuardCondition: check to see which GuardCondition changed, then react
accordingly. Recall that GuardConditions are completely controlled by your appli-
cation.
See Conditions and WaitSet Example (Section 4.6.5) to see how to determine which of
the attached Conditions is in the returned list.
Figure 4.7 WaitSet Blocking Behavior
1. And then read/take on the returned DataReader objects.

Chapter 4
4-44
4.6.5 Conditions and WaitSet Example
This example creates a WaitSet and then waits for one or more attached Conditions to
become true.
// Create a WaitSet
WaitSet* waitset = new WaitSet();
// Attach Conditions
DDSCondition* cond1 = ...;
DDSCondition* cond2 = entity->get_statuscondition();
DDSCondition* cond3 = reader->create_readcondition(
DDS_NOT_READ_SAMPLE_STATE,
DDS_ANY_VIEW_STATE,
DDS_ANY_INSTANCE_STATE);
DDSCondition* cond4 = new DDSGuardCondition();
DDSCondition* cond5 = ...;
DDS_ReturnCode_t retcode;
retcode = waitset->attach_condition(cond1);
if (retcode != DDS_RETCODE_OK) {
// ... error
}
retcode = waitset->attach_condition(cond2);
if (retcode != DDS_RETCODE_OK) {
// ... error
}
retcode = waitset->attach_condition(cond3);
if (retcode != DDS_RETCODE_OK) {
// ... error
}
retcode = waitset->attach_condition(cond4);
if (retcode != DDS_RETCODE_OK) {
// ... error
}
retcode = waitset->attach_condition(cond5);
if (retcode != DDS_RETCODE_OK) {
// ... error
}
// Wait for a condition to trigger or timeout
DDS_Duration_t timeout = { 0, 1000000 }; // 1ms
DDSConditionSeq active_conditions; // holder for active conditions

4.6 Conditions and WaitSets
4-45
4. DDS Entities
bool is_cond1_triggered = false;
bool is_cond2_triggered = false;
DDS_ReturnCode_t retcode;
retcode = waitset->wait(active_conditions, timeout);
if (retcode == DDS_RETCODE_TIMEOUT) {
// handle timeout
printf("Wait timed out. No conditions were triggered.\n");
}
else if (retcode != DDS_RETCODE_OK) {
// ... check for cause of failure
} else {
// success
if (active_conditions.length() == 0) {
printf("Wait timed out!! No conditions triggered.\n");
} else
// check if "cond1" or "cond2" are triggered:
for(i = 0; i < active_conditions.length(); ++i) {
if (active_conditions[i] == cond1) {
printf("Cond1 was triggered!");
is_cond1_triggered = true;
}
if (active_conditions[i] == cond2) {
printf("Cond2 was triggered!");
is_cond2_triggered = true;
}
if (is_cond1_triggered && is_cond2_triggered) {
break;
}
}
}
}
if (is_cond1_triggered) {
// ... do something because "cond1" was triggered ...
}
if (is_cond2_triggered) {
// ... do something because "cond2" was triggered ...
}

Chapter 4
4-46
// Delete the waitset
delete waitset;
waitset = NULL;
4.6.6 GuardConditions
GuardConditions are created by your application. GuardConditions provide a way for
your application to manually awaken a WaitSet. Like all Conditions, it has a single bool-
ean trigger_value. Your application can manually trigger the GuardCondition by calling
set_trigger_value().
RTI Data Distribution Service does not trigger or clear this type of condition—it is com-
pletely controlled by your application.
A GuardCondition has no factory. It is created as an object directly by the natural means
in each language binding (e.g., using “new” in C++ or Java). For example:
// Create a Guard Condition
Condition* my_guard_condition = new GuardCondition();
// Delete a Guard Condition
delete my_guard_condition;
When first created, the trigger_value is FALSE.
A GuardCondition has only two operations, get_trigger_value() and
set_trigger_value().
When your application calls set_trigger_value(DDS_BOOLEAN_TRUE), RTI Data Dis-
tribution Service will awaken any WaitSet to which the GuardCondition is attached.
4.6.7 ReadConditions and QueryConditions
ReadConditions are created by your application, but triggered by RTI Data Distribution
Service. ReadConditions provide a way for you to specify the data samples that you want
to wait for, by indicating the desired sample-states, view-states, and instance-states
1
.
Then RTI Data Distribution Service will trigger the ReadCondition when suitable samples
are available.
A QueryCondition is a special ReadCondition that allows you to specify a query expres-
sion and parameters, so you can filter on the locally available (already received) data.
QueryConditions use the same SQL-based filtering syntax as ContentFilteredTopics for
1. These states are described in The SampleInfo Structure (Section 7.4.5).

4.6 Conditions and WaitSets
4-47
4. DDS Entities
query expressions, parameters, etc. Unlike ContentFilteredTopics, QueryConditions are
applied to data already received, so they do not affect the reception of data.
Multiple mask combinations to be associated with a single content filter. This is impor-
tant because the maximum number of content filters that may be created per DataReader
is 32, but more than 32 QueryConditions may be created per DataReader, if they are differ-
ent mask-combinations of the same content filter.
ReadConditions and QueryConditions are created by using the DataReader’s
create_readcondition() and create_querycondition() operations. For example:
DDSReadCondition* my_read_condition = reader->create_readcondition(
DDS_NOT_READ_SAMPLE_STATE,
DDS_ANY_VIEW_STATE,
DDS_ANY_INSTANCE_STATE);
DDSQueryCondition* my_query_condition = reader->create_querycondition(
DDS_NOT_READ_SAMPLE_STATE,
DDS_ANY_VIEW_STATE,
DDS_ANY_INSTANCE_STATE
query_expression,
query_parameters);
Note: If you are using a ReadCondition to simply detect the presence of new data, con-
sider using a StatusCondition (Section 4.6.8) with the DATA_AVAILABLE_STATUS
instead, which will perform better in this situation.
A DataReader can have multiple attached ReadConditions and QueryConditions. A Read-
Condition or QueryCondition may only be attached to one DataReader.
To delete a ReadCondition or QueryCondition, use the DataReader’s
delete_readcondition() operation:
DDS_ReturnCode_t delete_readcondition (DDSReadCondition *condition)
After a ReadCondition is triggered, use the FooDataReader’s read/take “with condition”
operations (see Section 7.4.3.6) to access the samples.
Table 4.8 lists the operations available on ReadConditions.
4.6.7.1 How ReadConditions are Triggered
A ReadCondition has a trigger_value that determines whether the attached WaitSet is
BLOCKED or UNBLOCKED. Unlike the StatusCondition, the trigger_value of the Read-
Condition is tied to the presence of at least one sample with a sample-state, view-state,
and instance-state that matches those set in the ReadCondition. Furthermore, for the Que-
ryCondition to have a trigger_value==TRUE, the data associated with the sample must
be such that the query_expression evaluates to TRUE.

Chapter 4
4-48
The trigger_value of a ReadCondition depends on the presence of samples on the associ-
ated DataReader. This implies that a single ‘take’ operation can potentially change the
trigger_value of several ReadConditions or QueryConditions. For example, if all samples
are taken, any ReadConditions and QueryConditions associated with the DataReader that
had trigger_value==TRUE before will see the trigger_value change to FALSE. Note that
this does not guarantee that WaitSet objects that were separately attached to those con-
ditions will not be awakened. Once we have trigger_value==TRUE on a condition, it
may wake up the attached WaitSet, the condition transitioning to
trigger_value==FALSE does not necessarily 'unwakeup' the WaitSet, since 'unwaken-
ing' may not be possible. The consequence is that an application blocked on a WaitSet
may return from wait() with a list of conditions, some of which are no longer “active.”
This is unavoidable if multiple threads are concurrently waiting on separate WaitSet
objects and taking data associated with the same DataReader.
Consider the following example: A ReadCondition that has a sample_state_mask =
{NOT_READ} will have a trigger_value of TRUE whenever a new sample arrives and
will transition to FALSE as soon as all the newly arrived samples are either read (so their
status changes to READ) or taken (so they are no longer managed by RTI Data Distribu-
tion Service). However, if the same ReadCondition had a sample_state_mask = {READ,
NOT_READ}, then the trigger_value would only become FALSE once all the newly
arrived samples are taken (it is not sufficient to just read them, since that would only
change the SampleState to READ), which overlaps the mask on the ReadCondition.
Table 4.8 ReadCondition and QueryCondition Operations
Operation Description
get_datareader
Returns the DataReader to which the ReadCondition or QueryCondition
is attached.
get_instance_state_mask
Returns the instance states that were specified when the ReadCondi-
tion or QueryCondition was created. These are the sample’s instance
states that
RTI Data Distribution Service checks to determine
whether or not to trigger the ReadCondition or QueryCondition .
get_sample_state_mask
Returns the sample-states that were specified when the ReadCondition
or QueryCondition was created. These are the sample states that
RTI
Data Distribution Service
checks to determine whether or not to
trigger the ReadCondition or QueryCondition.
get_view_state_mask
Returns the view-states that were specified when the ReadCondition
or QueryCondition was created. These are the view states that
RTI
Data Distribution Service
checks to determine whether or not to
trigger the ReadCondition or QueryCondition.

4.6 Conditions and WaitSets
4-49
4. DDS Entities
4.6.7.2 QueryConditions
A QueryCondition is a special ReadCondition that allows your application to also specify
a filter on the locally available data.
The query expression is similar to a SQL WHERE clause and can be parameterized by
arguments that are dynamically changeable by the set_query_parameters() operation.
QueryConditions are triggered in the same manner as ReadConditions, with the additional
requirement that the sample must also satisfy the conditions of the content filter associ-
ated with the QueryCondition.
4.6.8 StatusConditions
StatusConditions are created automatically by RTI Data Distribution Service, one for each
Entity. RTI Data Distribution Service will trigger the StatusCondition when there is a
change to any of that Entity’s enabled statuses.
By default, when RTI Data Distribution Service creates a StatusCondition, all status bits are
turned on, which means it will check for all statuses to determine when to trigger the
StatusCondition. If you only want RTI Data Distribution Service to check for specific sta-
tuses, you can use the StatusCondition’s set_enabled_statuses() operation and set just
the desired status bits.
The trigger_value of the StatusCondition depends on the communication status of the
Entity (e.g., arrival of data, loss of information, etc.), ‘filtered’ by the set of enabled sta-
tuses on the StatusCondition.
The set of enabled statuses and its relation to Listeners and WaitSets is detailed in How
StatusConditions are Triggered (Section 4.6.8.1).
Table 4.10 lists the operations available on StatusConditions.
Table 4.9 QueryCondition Operations
Operation Description
get_query_expression
Returns the query expression specified when the QueryCondition was
created.
get_query_parameters
Returns the query parameters associated with the QueryCondition. That
is, the parameters specified on the last successful call to
set_query_parameters(), or if set_query_parameters() was never called,
the arguments specified when the QueryCondition was created.
set_query_parameters Changes the query parameters associated with the QueryCondition.

Chapter 4
4-50
Unlike other types of Conditions, StatusConditions are created by RTI Data Distribution
Service, not by your application. To access an Entity’s StatusCondition, use the Entity’s
get_statuscondition() operation. For example:
Condition* my_status_condition = entity->get_statuscondition();
After a StatusCondition is triggered, call the Entity’s get_status_changes() operation to
see which status(es) changed.
4.6.8.1 How StatusConditions are Triggered
The trigger_value of a StatusCondition is the boolean OR of the ChangedStatusFlag of
all the communication statuses to which it is sensitive. That is, trigger_value==FALSE
only if all the values of the ChangedStatusFlags are FALSE.
The sensitivity of the StatusCondition to a particular communication status is controlled
by the list of enabled_statuses set on the Condition by means of the
set_enabled_statuses() operation.
4.6.9 Using Both Listeners and WaitSets
You can use Listeners and WaitSets in the same application. For example, you may want
to use WaitSets and Conditions to access the data, and Listeners to be warned asynchro-
nously of erroneous communication statuses.
Table 4.10 StatusCondition Operations
Operation Description
set_enabled_statuses
Defines the list of communication statuses that are taken into account to
determine the trigger_value of the StatusCondition. This operation may
change the trigger_value of the StatusCondition.
WaitSets behavior depend on the changes of the trigger_value of their
attached conditions. Therefore, any WaitSet to which the StatusCondition
is attached is potentially affected by this operation.
If this function is not invoked, the default list of enabled statuses
includes all the statuses.
get_enabled_statuses
Retrieves the list of communication statuses that are taken into account
to determine the trigger_value of the StatusCondition. This operation
returns the statuses that were explicitly set on the last call to
set_enabled_statuses() or, if set_enabled_statuses() was never called, the
default list
get_entity
Returns the Entity associated with the StatusCondition. Note that there is
exactly one Entity associated with each StatusCondition.

4.6 Conditions and WaitSets
4-51
4. DDS Entities
We recommend that you choose one or the other mechanism for each particular commu-
nication status (not both). However, it both are enabled, then the Listener mechanism is
used first, then the WaitSet objects are signalled.

Chapter 4
4-52

5-1
5. Topics
Chapter 5 Topics
For a DataWriter and DataReader to communicate, they need to use the same Topic. A
Topic includes a name and an association with a user data type that has been registered
with RTI Data Distribution Service. Topic names are how different parts of the communi-
cation system find each other. To pi cs are named streams of data of the same data type.
DataWriters publish samples into the stream; DataReaders subscribe to data from the
stream. More than one Top ic can use the same user data type, but each Top ic needs a
unique name.
Topics, DataWriters, and DataReaders relate to each other as follows:
❏ Multiple Topic s (each with a unique name) can use the same user data type.
❏ Applications may have multiple DataWriters for each Topic.
❏ Applications may have multiple DataReaders for each Top ic .
❏ DataWriters and DataReaders must be associated with the same Topic in order for
them to be connected.
❏ Top ic s are created and deleted by a DomainParticipant, and as such, are owned by
that DomainParticipant. When two applications (DomainParticipants) want to use
the same To pi c, they must both create the Topic (even if the applications are on the
same node).
This chapter includes the following sections:
❏ Topics (Section 5.1)
❏ Topic QosPolicies (Section 5.2)
❏ Status Indicator for Topics (Section 5.3)
❏ ContentFilteredTopics (Section 5.4)
Builtin Topics: RTI Data Distribution Service uses ‘Builtin Topics’ to discover and keep
track of remote entities, such as new participants in the domain. Builtin Topics are dis-
cussed in Chapter 14.

Chapter 5
5-2
5.1 Topics
Before you can create a Topic, you need a user data type (see Chapter 3) and a Domain-
Participant (Section 8.3). The user data type must be registered with the DomainPartici-
pant (as we saw in the User Data Types chapter in Section 3.8.5.1).
Once you have created a Topic, what do you do with it? Top ics are primarily used as
parameters in other Entities’ operations. For instance, a Topic is required when a Pub-
lisher or Subscriber creates a DataWriter or DataReader, respectively. Topi cs do have a few
operations of their own, as listed in Table 5.1. For details on using these operations, see
the reference section or the online documentation.
Figure 5.1 Topic Module
Note: MultiTopics are not supported.

5.1 Topics
5-3
5. Topics
Table 5.1 Topic Operations
Purpose Operation Description Reference
Configuring
the Topic
enable Enables the Topic. Section 4.1.2
get_qos
Gets the Topic’s current QosPolicy set-
tings. This is most often used in prepara-
tion for calling set_qos().
Section 5.1.3
set_qos
Sets the Topic’s QoS. You can use this oper-
ation to change the values for the Topic’s
QosPolicies. Note, however, that not all
QosPolicies can be changed after the Top ic
has been created.
set_qos_with_
profile
Sets the Topic’s QoS based on a specified
QoS profile.
get_listener Gets the currently installed Listener.
Section 5.1.5
set_listener
Sets the Topic’s Listener. If you create the
Topic without a Listener, you can use this
operation to add one later. Setting the lis-
tener to NULL will remove the listener
from the Top ic .
narrow
A type-safe way to cast a pointer. This
takes a DDSTopicDescription pointer and
‘narrows’ it to a DDSTopic pointer.
Section 6.3.6
Checking
Status
get_inconsistent_
topic_status
Allows an application to retrieve a Topic’s
INCONSISTENT_TOPIC_STATUS status.
Section 5.3.1
get_status_changes
Gets a list of statuses that have changed
since the last time the application read the
status or the listeners were called.
Section 4.1.4
Navigating
Relation-
ships
get_name
Gets the topic_name string used to create
the Topic.
Section 5.1.1
get_type_name
Gets the type_name used to create the
Topic.
get_participant
Gets the DomainParticipant to which this
Topic belongs.
Section 5.1.6.1

Chapter 5
5-4
5.1.1 Creating Topics
Topi cs are created using the DomainParticipant’s create_topic() or
create_topic_with_profile() operation:
DDSTopic * create_topic (const char *topic_name,
const char *type_name,
const DDS_TopicQos &qos,
DDSTopicListener *listener,
DDS_StatusMask mask)
DDSTopic * create_topic_with_profile (
const char *topic_name,
const char *type_name,
const char *library_name,
const char *profile_name,
DDSTopicListener *listener,
DDS_StatusMask mask)
A QoS profile is way to use QoS settings from an XML file or string. With this approach,
you can change QoS settings without recompiling the application. For details, see
Chapter 15: Configuring QoS with XML.
topic_name Name for the new Topic, must not exceed 255 characters.
type_name Name for the user data type, must not exceed 255 characters. It must be
the same name that was used to register the type, and the type must be registered
with the same DomainParticipant used to create this Topic. See Section 3.6.
qos If you want to use the default QoS settings (described in the online documenta-
tion), use DDS_TOPIC_QOS_DEFAULT for this parameter (see Figure 5.2). If
you want to customize any of the QosPolicies, supply a QoS structure (see
Section 5.1.3).
If you use DDS_TOPIC_QOS_DEFAULT, it is not safe to create the topic while
another thread may be simultaneously calling the DomainParticipant’s
set_default_topic_qos() operation.
listener Listeners are callback routines. RTI Data Distribution Service uses them to notify
your application of specific events (status changes) that may occur with respect to
the Topic. The listener parameter may be set to NULL if you do not want to install
a Listener. If you use NULL, the Listener of the DomainParticipant to which the Topic
belongs will be used instead (if it is set). For more information on TopicListeners,
see Section 5.1.5.

5.1 Topics
5-5
5. Topics
mask This bit-mask indicates which status changes will cause the Listener to be
invoked. The bits in the mask that are set must have corresponding callbacks
implemented in the Listener. If you use NULL for the Listener, use
DDS_STATUS_MASK_NONE for this parameter. If the Listener implements all
callbacks, use DDS_STATUS_MASK_ALL. For information on statuses, see Lis-
teners (Section 4.4).
library_name A QoS Library is a named set of QoS profiles. See QoS Libraries (Section
15.9). If NULL is used for library_name, the DomainParticipant’s default library is
assumed.
profile_name A QoS profile groups a set of related QoS, usually one per entity. See QoS
Profiles (Section 15.8). If NULL is used for profile_name, the DomainParticipant’s
default profile is assumed and library_name is ignored.
Note: It is not safe to create a topic while another thread is calling
lookup_topicdescription() for that same topic (see Section 8.3.7).
For more examples, see Configuring QoS Settings when the Topic is Created (Section
5.1.3.1).
5.1.2 Deleting Topics
To delete a Topic, use the DomainParticipant’s delete_topic() operation:
DDS_ReturnCode_t delete_topic (DDSTopic * topic)
const char *type_name = NULL;
// register the type
type_name = FooTypeSupport::get_type_name();
retcode = FooTypeSupport::register_type(participant, type_name);
if (retcode != DDS_RETCODE_OK) {
// handle error
}
// create the topic
DDSTopic* topic = participant->create_topic("Example Foo",
type_name, DDS_TOPIC_QOS_DEFAULT,
NULL, DDS_STATUS_MASK_NONE);
if (topic == NULL) {
// process error here
};
Figure 5.2 Creating a Topic with Default QosPolicies

Chapter 5
5-6
Note, however, that you cannot delete a Topic if there are any existing DataReaders or
DataWriters (belonging to the same DomainParticipant) that are still using it. All
DataReaders and DataWriters associated with the To pi c must be deleted first.
5.1.3 Setting Topic QosPolicies
A To pi c’s QosPolicies control its behavior, or more specifically, the behavior of the
DataWriters and DataReaders of the Topic. You can think of the policies as the ‘properties’
for the Topic. The DDS_TopicQos structure has the following format:
DDS_TopicQos struct {
DDS_TopicDataQosPolicy topic_data;
DDS_DurabilityQosPolicy durability;
DDS_DurabilityServiceQosPolicy durability_service;
DDS_DeadlineQosPolicy deadline;
DDS_LatencyBudgetQosPolicy latency_budget;
DDS_LivelinessQosPolicy liveliness;
DDS_ReliabilityQosPolicy reliability;
DDS_DestinationOrderQosPolicy destination_order;
DDS_HistoryQosPolicy history;
DDS_ResourceLimitsQosPolicy resource_limits;
DDS_TransportPriorityQosPolicy transport_priority;
DDS_LifespanQosPolicy lifespan;
DDS_OwnershipQosPolicy ownership;
} DDS_TopicQos;
Table 5.2 summarizes the meaning of each policy (arranged alphabetically). For infor-
mation on why you would want to change a particular QosPolicy, see the section noted
in the Reference column. For defaults and valid ranges, please refer to the online docu-
mentation for each policy.
Table 5.2 Topic QosPolicies
QosPolicy Description
Deadline
For a DataReader, specifies the maximum expected elapsed time between
arriving data samples.
For a DataWriter, specifies a commitment to publish samples with no greater
elapsed time between them.
See Section 6.5.4.
DestinationOrder
Controls how RTI Data Distribution Service will deal with data sent by multi-
ple DataWriters for the same topic. Can be set to "by reception timestamp" or
to "by source timestamp". See Section 6.5.5.

5.1 Topics
5-7
5. Topics
5.1.3.1 Configuring QoS Settings when the Topic is Created
As described in Creating Topics (Section 5.1.1), there are different ways to create a Top ic,
depending on how you want to specify its QoS (with or without a QoS profile).
❏ In Figure 5.2 on page 5-5, we saw an example of how to create a Top ic with
default QosPolicies by using the special constant,
DDS_TOPIC_QOS_DEFAULT, which indicates that the default QoS values for
a Topic should be used. The default To p ic QoS values are configured in the
Durability
Specifies whether or not RTI Data Distribution Service will store and deliver
data that were previously published to new DataReaders. See Section 6.5.6.
DurabilityService
Various settings to configure the external Persistence Service used by RTI
Data Distribution Service for DataWriters with a Durability QoS setting of Per-
sistent Durability. See Section 6.5.7.
History
Specifies how much data must to stored by RTI Data Distribution Servicefor
the DataWriter or DataReader. This QosPolicy affects the RELIABILITY
QosPolicy (Section 6.5.17) as well as the DURABILITY QosPolicy (Section
6.5.6). See Section 6.5.8.
LatencyBudget
Suggestion to DDS on how much time is allowed to deliver data. See
Section 6.5.9.
Lifespan
Specifies how long RTI Data Distribution Service should consider data sent by
an user application to be valid. See Section 6.5.10.
Liveliness
Specifies and configures the mechanism that allows DataReaders to detect
when DataWriters become disconnected or "dead." See Section 6.5.11.
Ownership
Along with Ownership Strength, specifies if DataReaders for a topic can
receive data from multiple DataWriters at the same time. See Section 6.5.13.
Reliability
Specifies whether or not DDS will deliver data reliably. See Section 6.5.17.
ResourceLimits
Controls the amount of physical memory allocated for DDS entities, if
dynamic allocations are allowed, and how they occur. Also controls memory
usage among different instance values for keyed topics. See Section 6.5.18.
TopicData
Along with Group Data QosPolicy and User Data QosPolicy, used to attach a
buffer of bytes to RTI Data Distribution Service's discovery meta-data. See
Section 5.2.1.
TransportPriority
Set by a DataWriter to tell DDS that the data being sent is a different "priority"
than other data. See Section 6.5.19.
Table 5.2 Topic QosPolicies
QosPolicy Description

Chapter 5
5-8
DomainParticipant; you can change them with the DomainParticipant’s
set_default_topic_qos() or set_default_topic_qos_with_profile() operations
(see Section 8.3.6.4).
❏ To create a To pic with non-default QoS values, without using a QoS profile, use
the DomainParticipant’s get_default_topic_qos() method to initialize a
DDS_TopicQos structure. Then change the policies from their default values
before passing the QoS structure to create_topic().
❏ You can also create a Topic and specify its QoS settings via a QoS profile. To do so,
call create_topic_with_profile().
❏ If you want to use a QoS profile, but then make some changes to the QoS before
creating the Top ic , call get_topic_qos_from_profile(), modify the QoS and use
the modified QoS when calling create_topic().

5.1 Topics
5-9
5. Topics
5.1.3.2 Changing QoS Settings After the Topic Has Been Created
There are 2 ways to change an existing Topic’s QoS after it is has been created—again
depending on whether or not you are using a QoS Profile.
❏ To change QoS programmatically (that is, without using a QoS Profile), see the
example code in Figure 5.3 on page 5-9. It retrieves the current values by calling
the To pi c’s get_qos() operation. Then it modifies the value and calls set_qos() to
apply the new value. Note, however, that some QosPolicies cannot be changed
after the Topic has been enabled—this restriction is noted in the descriptions of
the individual QosPolicies.
❏ You can also change a Topic’s (and all other Entities’) QoS by using a QoS Profile.
For an example, see Figure 5.4 on page 5-9. For more information, see
Chapter 15: Configuring QoS with XML.
DDS_TopicQos topic_qos;
1
// Get current QoS. topic points to an existing DDSTopic.
if (topic->get_qos(topic_qos) != DDS_RETCODE_OK) {
// handle error
}
// Next, make changes.
// New ownership kind will be Exclusive
topic_qos.ownership.kind = DDS_EXCLUSIVE_OWNERSHIP_QOS;
// Set the new QoS
if (topic->set_qos(topic_qos) != DDS_RETCODE_OK ) {
// handle error
}
1. For the C API, you need to use DDS_TopicQos_INITIALIZER or DDS_TopicQos_initialize(). See Spe-
cial QosPolicy Handling Considerations for C (Section 4.2.2)
Figure 5.3
Changing the QoS of an Existing Topic (without a QoS Profile)
retcode = topic->set_qos_with_profile(
“FooProfileLibrary”,”FooProfile”);
if (retcode != DDS_RETCODE_OK) {
// handle error
}
Figure 5.4 Changing the QoS of an Existing Topic with a QoS Profile

Chapter 5
5-10
5.1.4 Copying QoS From a Topic to a DataWriter or DataReader
Only the TOPIC_DATA QosPolicy strictly applies to To pic s—it is described in this chap-
ter, while the others are described in the sections noted in the Reference column of
Table 5.2. The rest of the QosPolicies for a Topic can also be set on the corresponding
DataWriters and/or DataReaders. Actually, the values that RTI Data Distribution Service
uses for those policies are taken directly from those set on the DataWriters and DataRead-
ers. The values for those policies are stored only for reference in the DDS_TopicQos
structure.
Because many QosPolicies affect the behavior of matching DataWriters and DataReaders,
the DDS_TopicQos structure is provided as a convenient way to set the values for those
policies in a single place in the application. Otherwise, you would have to modify the
individual QosPolicies within separate DataWriter and DataReader QoS structures. And
because some QosPolicies are compared between DataReaders and DataWriters, you will
need to make certain that the individual values that you set are compatible (see
Section 4.2.1).
The use of the DDS_TopicQos structure to set the values of any QosPolicy except
TOPIC_DATA—which only applies to Top ics —is really a way to share a single set of val-
ues with the associated DataWriters and DataReaders, as well as to avoid creating those
entities with inconsistent QosPolicies.
To cause a DataWriter to use its Top ic ’s QoS settings, either:
❏ Pass DDS_DATAWRITER_QOS_USE_TOPIC_QOS to create_datawriter(), or
❏ Call the Publisher’s copy_from_topic_qos() operation
To cause a DataReader to use its Topic’s QoS settings, either:
❏ Pass DDS_DATAREADER_QOS_USE_TOPIC_QOS to create_datareader(), or
❏ Call the Subscriber’s copy_from_topic_qos() operation
Please refer to the online documentation for the Publisher’s create_datawriter() and Sub-
scriber’s create_datareader() methods for more information about using values from the
Topic QosPolicies when creating DataWriters and DataReaders.
5.1.5 Setting Up TopicListeners
When you create a Topic, you have the option of giving it a Listener. A Topic Li sten er
includes just one callback routine, on_inconsistent_topic(). If you create a To pic List ene r
(either as part of the Topic creation call, or later with the set_listener() operation), RTI
Data Distribution Service will invoke the TopicListener’s on_inconsistent_topic() method
whenever it detects that another application has created a Topic with same name but

5.1 Topics
5-11
5. Topics
associated with a different user data type. For more information, see
INCONSISTENT_TOPIC Status (Section 5.3.1).
Note: Some operations cannot be used within a listener callback, see Restricted Opera-
tions in Listener Callbacks (Section 4.5.1).
If a Top ic ’s Listener has not been set and RTI Data Distribution Service detects an inconsis-
tent Topic, the DomainParticipantListener (if it exists) will be notified instead (see
Section 8.3.5). So you only need to set up a To pi cL is te ne r if you need to perform specific
actions when there is an error on that particular Topic. In most cases, you can set the Top -
icListener to NULL and process inconsistent-topic errors in the DomainParticipantListener
instead.
5.1.6 Navigating Relationships Among Entities
5.1.6.1 Finding a Topic’s DomainParticipant
To retrieve a handle to the Topic’s DomainParticipant, use the get_participant() operation:
DDSDomainParticipant*DDSTopicDescription::get_participant()
Notice that this method belongs to the DDSTopicDescription class, which is the base
class for DDSTopic.
5.1.6.2 Retrieving a Topic’s Name or Type Name
If you want to retrieve the topic_name or type_name used in the create_topic() operation,
use these methods:
const char* DDSTopicDescription::get_type_name();
const char* DDSTopicDescription::get_name();
Notice that these methods belong to the DDSTopicDescription class, which is the base
class for DDSTopic.

Chapter 5
5-12
5.2 Topic QosPolicies
This section describes the only QosPolicy that strictly applies to Top ic s (and no other
types of Entities)—the TOPIC_DATA QosPolicy. For a complete list of the QosPolicies
that can be set for To pi cs , see Table 5.2 on page 5-6.
Most of the QosPolicies that can be set on a Top ic can also be set on the corresponding
DataWriter and/or DataReader. The Topic’s QosPolicy is essentially just a place to store
QoS settings that you plan to share with multiple entities that use that Topic (see how in
Section 5.1.3); they are not used otherwise and are not propagated on the wire.
5.2.1 TOPIC_DATA QosPolicy
This QosPolicy provides an area where your application can store additional informa-
tion related to the Top ic . This information is passed between applications during discov-
ery (see Chapter 12: Discovery) using builtin-topics (see Chapter 14: Built-In Topics).
How this information is used will be up to user code. RTI Data Distribution Service does
not do anything with the information stored as TOPIC_DATA except to pass it to other
applications. Use cases are usually application-to-application identification, authentica-
tion, authorization, and encryption purposes.
The value of the TOPIC_DATA QosPolicy is sent to remote applications when they are
first discovered, as well as when the Top ic ’s set_qos() method is called after changing
the value of the TOPIC_DATA. User code can set listeners on the builtin DataReaders of
the builtin Topi cs used by RTI Data Distribution Service to propagate discovery informa-
tion. Methods in the builtin topic listeners will be called whenever new applications,
DataReaders, and DataWriters are found. Within the user callback, you will have access to
the TOPIC_DATA that was set for the associated Topic.
Currently, TOPIC_DATA of the associated Top ic is only propagated with the information
that declares a DataWriter or DataReader. Thus, you will need to access the value of
TOPIC_DATA through DDS_PublicationBuiltinTopicData or
DDS_SubscriptionBuiltinTopicData (see Chapter 14: Built-In Topics).
The structure for the TOPIC_DATA QosPolicy includes just one field, as seen in
Table 5.3. The field is a sequence of octets that translates to a contiguous buffer of bytes
whose contents and length is set by the user. The maximum size for the data are set in
the DOMAIN_PARTICIPANT_RESOURCE_LIMITS QosPolicy (DDS Extension) (Sec-
tion 8.5.4).
This policy is similar to the GROUP_DATA (Section 6.4.4) and USER_DATA
(Section 6.5.23) policies that apply to other types of Entities.

5.2 Topic QosPolicies
5-13
5. Topics
5.2.1.1 Example
One possible use of TOPIC_DATA is to send an associated XML schema that can be
used to process the data stored in the associated user data structure of the Topic. The
schema, which can be passed as a long sequence of characters, could be used by an XML
parser to take samples of the data received for a Top ic and convert them for updating
some graphical user interface, web application or database.
5.2.1.2 Properties
This QosPolicy can be modified at any time. A change in the QosPolicy will cause RTI
Data Distribution Service to send packets containing the new TOPIC_DATA to all of the
other applications in the domain.
Because Topi cs are created independently by the applications that use the Top ic , there
may be different instances of the same Top ic (same topic name and data type) in differ-
ent applications. The TOPIC_DATA for different instances of the same Top ic may be set
differently by different applications.
5.2.1.3 Related QosPolicies
❏ GROUP_DATA QosPolicy (Section 6.4.4)
❏ USER_DATA QosPolicy (Section 6.5.23)
❏ DOMAIN_PARTICIPANT_RESOURCE_LIMITS QosPolicy (DDS Extension)
(Section 8.5.4)
5.2.1.4 Applicable Entities
❏ Topics (Section 5.1)
5.2.1.5 System Resource Considerations
As mentioned earlier, the maximum size of the TOPIC_DATA is set in the
topic_data_max_length field of the DOMAIN_PARTICIPANT_RESOURCE_LIMITS
QosPolicy (DDS Extension) (Section 8.5.4). Because RTI Data Distribution Service will
allocate memory based on this value, you should only increase this value if you need to.
If your system does not use TOPIC_DATA, then you can set this value to 0 to save mem-
Table 5.3 DDS_TopicDataQosPolicy
Type Field Name Description
DDS_OctetSeq value default: empty

Chapter 5
5-14
ory. Setting the value of the TOPIC_DATA QosPolicy to hold data longer than the value
set in the topic_data_max_length field will result in failure and an
INCONSISTENT_QOS_POLICY return code.
However, should you decide to change the maximum size of TOPIC_DATA, you must
make certain that all applications in the RTI Data Distribution Service domain have
changed the value of topic_data_max_length to be the same. If two applications have
different limits on the size of TOPIC_DATA, and one application sets the TOPIC_DATA
QosPolicy to hold data that is greater than the maximum size set by another application,
then the DataWriters and DataReaders of that Topic between the two applications will not
connect. This is also true for the GROUP_DATA (Section 6.4.4) and USER_DATA
(Section 6.5.23) QosPolicies.
5.3 Status Indicator for Topics
There is only one communication status defined for a Topic,
ON_INCONSISTENT_TOPIC. You can use the get_inconsistent_topic_status() opera-
tion to access the current value of the status or use a TopicListener to catch the change in
the status as it occurs. See Section 4.4 for a general discussion on Listeners and Statuses.
5.3.1 INCONSISTENT_TOPIC Status
In order for two applications to communicate with the same Topic, it has to be created
with the same name and data type. This status indicates that another DomainParticipant
has created a Topic using the same name as the local Topic, but with a different data type.
The status is a structure of type DDS_InconsistentTopicStatus, see Table 5.4. The
total_count keeps track of the total number of times that an inconsistent topic was
found. The TopicListener’s on_inconsistent_topic() operation is invoked when this status
changes (an inconsistent topic is found). You can also retrieve the current value by call-
ing the Top ic ’s get_inconsistent_topic_status() operation.
The value of total_count_change reflects the number of inconsistent topics that were
found since the last time get_inconsistent_topic_status() was called by user code or
on_inconsistent_topic() was invoked by RTI Data Distribution Service.

5.4 ContentFilteredTopics
5-15
5. Topics
5.4 ContentFilteredTopics
A ContentFilteredTopic is a Topic with filtering properties. It makes it possible to sub-
scribe to topics and at the same time specify that you are only interested in a subset of
the topic’s data.
For example, suppose you have a topic that contains a temperature reading for a boiler,
but you are only interested in temperatures outside the normal operating range. A Con-
tentFilteredTopic can be used to limit the number of data samples a DataReader has to
process and may also reduce the amount of data sent over the network.
This section includes the following:
❏ Overview (Section 5.4.1)
❏ Where Filtering is Applied—Publishing vs. Subscribing Side (Section 5.4.2)
❏ Creating ContentFilteredTopics (Section 5.4.3)
❏ Deleting ContentFilteredTopics (Section 5.4.4)
❏ Using a ContentFilteredTopic (Section 5.4.5)
❏ SQL Filter Expression Notation (Section 5.4.6)
❏ Example SQL Filter Expressions (Section 5.4.6.11)
❏ Custom Content Filters (Section 5.4.8)
5.4.1 Overview
A ContentFilteredTopic creates a relationship between a Topic, also called the related
topic, and user-specified filtering properties. The filtering properties consist of an
expression and a set of parameters.
Table 5.4 DDS_InconsistentTopicStatus Structure
Type Field Name Description
DDS_Long total_count
Total number of To pi cs discovered whose name matches the
Topic to which this status is attached but whose type is
inconsistent.
DDS_Long total_count_change
The change in total_count since the last time this status was
read.

Chapter 5
5-16
❏ The filter expression evaluates a logical expression on the Topic content. The fil-
ter expression is similar to the WHERE clause in a SQL expression.
❏ The parameters are strings that give values to the 'parameters' in the filter
expression. There must be one parameter string for each parameter in the filter
expression.
A ContentFilteredTopic is a type of topic description, and can be used to create
DataReaders. However, a ContentFilteredTopic is not a DDS entity—it does not have
QosPolicies or Listeners.
A ContentFilteredTopic relates to other entities in DDS as follows:
❏ ContentFilteredTopics are used when creating DataReaders, not DataWriters.
❏ Multiple DataReaders can be created with the same ContentFilteredTopic.
❏ A ContentFilteredTopic belongs to (is created/deleted by) a DomainParticipant.
❏ A ContentFilteredTopic and Topic must be in the same DomainParticipant.
❏ A ContentFilteredTopic can only be related to a single Top ic.
❏ A Topic can be related to multiple ContentFilteredTopics.
❏ A ContentFilteredTopic can have the same name as a Topic, but ContentFiltered-
Topics must have unique names within the same DomainParticipant.
❏ A DataReader created with a ContentFilteredTopic will use the related Topic's
QoS and Listeners.
❏ Changing filter parameters on a ContentFilteredTopic causes all DataReaders
using the same ContentFilteredTopic to see the change.
❏ A Topic cannot be deleted as long as at least one ContentFilteredTopic that has
been created with it exists.
❏ A ContentFilteredTopic cannot be deleted as long as at least one DataReader that
has been created with the ContentFilteredTopic exists.
5.4.2 Where Filtering is Applied—Publishing vs. Subscribing Side
Filtering may be performed on either side of the distributed application. (The
DataWriter obtains the filter expression and parameters from the DataReader during dis-
covery.)
RTI Data Distribution Service also supports network-switch filtering for multi-channel
DataWriters (see Chapter 16: Multi-channel DataWriters).

5.4 ContentFilteredTopics
5-17
5. Topics
A DataWriter will automatically filter data samples for a DataReader if all of the follow-
ing are true; otherwise filtering is performed by the DataReader.
1. The DataWriter is filtering for no more than
writer_resource_limits.max_remote_reader_filters DataReaders at the same
time.
• There is a resource-limit on the DataWriter called
writer_resource_limits.max_remote_reader_filters (see
DATA_WRITER_RESOURCE_LIMITS QosPolicy (DDS Extension) (Sec-
tion 6.5.3)). This value can be from 0-32. 0 means do not filter any
DataReader and 32 (default value) means filter up to 32 DataReaders.
• If a DataWriter is filtering max_remote_reader_filters DataReaders at the
same time and a new filtered DataReader is created, then the newly created
DataReader (max_remote_reader_filters + 1) is not filtered. Even if one of
the first (max_remote_reader_filters) DataReaders is deleted, that already
created DataReader (max_remote_reader_filters + 1) will still not be
filtered. However, any subsequently created DataReaders will be filtered as
long as the number of DataReaders currently being filtered is not more than
writer_resource_limits.max_remote_reader_filters.
2. The DataReader is not subscribing to data using multicast.
3. There are no more than 4 matching DataReaders in the same locator (see Peer
Descriptor Format (Section 12.2.1)).
4. The DataWriter has infinite liveliness. (See LIVELINESS QosPolicy (Section
6.5.11).)
5. The DataWriter is not using an Asynchronous Publisher. (That is, the DataWriter’s
PUBLISH_MODE QosPolicy (DDS Extension) (Section 6.5.16) kind is set to
DDS_SYNCHRONOUS_PUBLISHER_MODE_QOS.)
6. If you are using a custom filter (not the default one), it must be registered in the
DomainParticipant of the DataWriter and the DataReader.
7. The type-code information is sent on the wire (see
Using Generated Types without
RTI Data Distribution Service (Standalone) (Section 3.7)).
Note:
In addition to filtering new samples, a DataWriter can also be configured to filter
previously written samples stored in the DataWriter’s queue for newly discovered
DataReaders. To do so, use the refilter field in the DataWriter’s HISTORY QosPolicy
(Section 6.5.8).

Chapter 5
5-18
5.4.3 Creating ContentFilteredTopics
To create a ContentFilteredTopic that uses the default SQL filter, use the DomainPartici-
pant’s create_contentfilteredtopic() operation:
DDS_ContentFilteredTopic *create_contentfilteredtopic
(const char * name,
const DDS_Topic * related_topic,
const char * filter_expression,
const DDS_StringSeq & expression_parameters)
Or, to use a custom filter or the builtin STRINGMATCH filter (see Section 5.4.7), use the
create_contentfilteredtopic_with_filter() variation:
DDS_ContentFilteredTopic *create_contentfilteredtopic_with_filter
(const char * name,
DDSTopic * related_topic,
const char * filter_expression,
const DDS_StringSeq & expression_parameters,
const char * filter_name =
DDS_SQLFILTER_NAME)
name
Name of the ContentFilteredTopic. Note that it is legal for a ContentFiltered-
Topic to have the same name as a Topic in the same DomainParticipant, but a Con-
tentFilteredTopic cannot have the same name as another ContentFilteredTopic in
the same DomainParticipant. This parameter cannot be NULL.
related_topic The related Topic to be filtered. The related topic must be in the same
DomainParticipant as the ContentFilteredTopic. This parameter cannot be NULL.
The same related topic can be used in many different ContentFilteredTopics.
filter_expression A logical expression on the contents on the Topic. If the expression
evaluates to TRUE, a sample is received; otherwise it is discarded. This parameter
cannot be NULL. Once a ContentFilteredTopic is created, its filter_expression
cannot be changed. The notation for this expression depends on the filter that you
are using (specified by the filter_name parameter). See SQL Filter Expression
Notation (Section 5.4.6) and STRINGMATCH Filter Expression Notation (Section
5.4.7).
expression_parameters A string sequence of filter expression parameters. Each param-
eter corresponds to a positional argument in the filter expression: element 0 corre-
sponds to positional argument 0, element 1 to positional argument 1, and so forth.
The expression_parameters can be changed with set_expression_parameters()
(Section 5.4.5.2), append_to_expression_parameter() (Section 5.4.5.3) and
remove_from_expression_parameter() (Section 5.4.5.4).

5.4 ContentFilteredTopics
5-19
5. Topics
filter_name Name of the content filter to use for filtering. The filter must have been
previously registered with the DomainParticipant (see Registering a Custom Filter
(Section 5.4.8.1)). There are two builtin filters, DDS_SQLFILTER_NAME
1
(the
default filter) and DDS_STRINGMATCHFILTER_NAME
1
—these are automati-
cally registered.
To use the STRINGMATCH filter, call create_contentfilteredtopic_with_filter()
with "DDS_STRINGMATCHFILTER_NAME" as the filter_name.
STRINGMATCH filter expressions have the syntax:
<field name> MATCH <string pattern> (see Section 5.4.7).
.If you run rtiddsgen with -notypecode, then you must use the "with_filter" version with
a custom filter instead—do not use the builtin SQL filter or the STRINGMATCH filter
with the -notypecode option because they require type-codes. See rtiddsgen Command-
Line Arguments (Section 3.6.1).
To summarize:
❏ To use the builtin default SQL filter:
• Do not use -notypecode when running rtiddsgen
• Call create_contentfilteredtopic()
• See SQL Filter Expression Notation (Section 5.4.6)
❏ To use the builtin STRINGMATCH filter:
• Do not use -notypecode when running rtiddsgen
• Call create_contentfilteredtopic_with_filter(), setting the filter_name to
DDS_STRINGMATCHFILTER_NAME
• See STRINGMATCH Filter Expression Notation (Section 5.4.7)
❏ To use a custom filter:
• call create_contentfilteredtopic_with_filter(), setting the filter_name to a
registered custom filter
❏ To use rtiddsgen with -notypecode:
• call create_contentfilteredtopic_with_filter(), setting the filter_name to a
registered custom filter
1. In the Java and C# APIs, you can access the names of the builtin filters by using
DomainParticipant.SQLFILTER_NAME and DomainParticipant.STRINGMATCHFILTER_NAME.

Chapter 5
5-20
Note:
Be careful with memory management of the string sequence in some of the Con-
tentFilteredTopic APIs. See the String Support section in the online documentation
(within the Infrastructure module) for details on sequences.
5.4.4 Deleting ContentFilteredTopics
To delete a ContentFilteredTopic, use the DomainParticipant’s
delete_contentfilteredtopic() operation:
1. Make sure no DataReaders are using the ContentFilteredTopic. (If this is not true,
the operation returns PRECONDITION_NOT_MET.)
2. Delete the ContentFilteredTopic by using the DomainParticipant’s
delete_contentfilteredtopic() operation.
DDS_ReturnCode_t delete_contentfilteredtopic
(DDSContentFilteredTopic * a_contentfilteredtopic)
5.4.5 Using a ContentFilteredTopic
Once you’ve created a ContentFilteredTopic, you can use the operations listed in
Table 5.5.
Table 5.5 ContentFilteredTopic Operations
Operation Description Reference
append_to_expression_param
eter
Concatenates a string value to the input expres-
sion parameter
Section 5.4.5.3
get_expression_parameters Gets the expression parameters. Section 5.4.5.1
get_filter_expression Gets the expression. Section 5.4.5.5
get_related_topic Gets the related Topic. Section 5.4.5.6
narrow
Casts a DDS_TopicDescription pointer to a Con-
tentFilteredTopic pointer.
Section 5.4.5.7
remove_from_expression_
parameter
Removes a string value from the input expres-
sion parameter
Section 5.4.5.4
set_expression_parameters Changes the expression parameters. Section 5.4.5.2

5.4 ContentFilteredTopics
5-21
5. Topics
5.4.5.1 Getting the Current Expression Parameters
To get the expression parameters, use the ContentFilteredTopic’s
get_expression_parameters() operation:
DDS_ReturnCode_t get_expression_parameters
(struct DDS_StringSeq & parameters)
parameters
The filter expression parameters.
The memory for the strings in this sequence is managed as described in the String
Support section of the online documentation (within the Infrastructure module).
In particular, be careful to avoid a situation in which RTI Data Distribution Service
allocates a string on your behalf and you then reuse that string in such a way that
RTI Data Distribution Service believes it to have more memory allocated to it than it
actually does. This parameter cannot be NULL.
This operation gives you the expression parameters that were specified on the last suc-
cessful call to set_expression_parameters() or, if that was never called, the parameters
specified when the ContentFilteredTopic was created.
5.4.5.2 Setting Expression Parameters
To change the expression parameters associated with a ContentFilteredTopic:
DDS_ReturnCode_t set_expression_parameters
(const struct DDS_StringSeq & parameters)
parameters The filter expression parameters. Each element in the parameter sequence
corresponds to a positional parameter in the filter expression. When using the
default DDS_SQLFILTER_NAME, parameter strings are automatically converted
to the member type. For example, "4" is converted to the integer 4. This parameter
cannot be NULL.
Note: The ContentFilteredTopic’s operations do not manage the sequences; you must
ensure that the parameter sequences are valid. Please refer to the String Support section
in the online documentation (within the Infrastructure module) for details on
sequences.
5.4.5.3 Appending a String to an Expression Parameter
To concatenate a string to an expression parameter, use the ContentFilteredTopic's
append_to_expression_parameter() operation:
DDS_ReturnCode_t append_to_expression_parameter(
const DDS_Long index,
const char* value);

Chapter 5
5-22
When using the STRINGMATCH filter, index must be 0.
This function is only intended to be used with the builtin SQL and STRINGMATCH fil-
ters. This function can be used in expression parameters associated with MATCH oper-
ators (see SQL Extension: Regular Expression Matching (Section 5.4.6.4)) to add a
pattern to the match pattern list. For example, if filter_expression is:
symbol MATCH 'IBM'
Then append_to_expression_parameter(0, "MSFT") would generate the expression:
symbol MATCH 'IBM,MSFT'
5.4.5.4 Removing a String from an Expression Parameter
To remove a string from an expression parameter use the ContentFilteredTopic's
remove_from_expression_parameter() operation:
DDS_ReturnCode_t remove_from_expression_parameter(
const DDS_Long index,
const char* value)
When using the STRINGMATCH filter, index must be 0.
This function is only intended to be used with the builtin SQL and STRINGMATCH fil-
ters. It can be used in expression parameters associated with MATCH operators (see
SQL Extension: Regular Expression Matching (Section 5.4.6.4)) to remove a pattern from
the match pattern list. For example, if filter_expression is:
symbol MATCH 'IBM,MSFT'
Then remove_from_expression_parameter(0, "IBM") would generate the expression:
symbol MATCH 'MSFT'
5.4.5.5 Getting the Filter Expression
To get the filter expression that was specified when the ContentFilteredTopic was cre-
ated:
const char* get_filter_expression ()
There is no corresponding set operation. The filter expression can only be set when the
ContentFilteredTopic is created.

5.4 ContentFilteredTopics
5-23
5. Topics
5.4.5.6 Getting the Related Topic
To get the related topic that was specified when the ContentFilteredTopic was created:
DDS_Topic * get_related_topic ()
5.4.5.7 ‘Narrowing’ a ContentFilteredTopic to a TopicDescription
To safely cast a DDS_TopicDescription pointer to a ContentFilteredTopic pointer, use the
ContentFilteredTopic’s narrow() operation:
DDS_TopicDescription* narrow ()
5.4.6 SQL Filter Expression Notation
A SQL filter expression is similar to the WHERE clause in SQL. The SQL expression for-
mat provided by RTI Data Distribution Service also supports the MATCH operator as an
extended operator (see Section 5.4.6.4).
The following sections provide more information:
❏ SQL Grammar (Section 5.4.6.1)
❏ Token Expressions (Section 5.4.6.2)
❏ Type Compatibility in the Predicate (Section 5.4.6.3)
❏ SQL Extension: Regular Expression Matching (Section 5.4.6.4)
❏ Composite Members (Section 5.4.6.5)
❏ Strings (Section 5.4.6.6)
❏ Enumerations (Section 5.4.6.7)
❏ Pointers (Section 5.4.6.8)
❏ Arrays (Section 5.4.6.9)
❏ Sequences (Section 5.4.6.10)
5.4.6.1 SQL Grammar
This section describes the subset of SQL syntax, in Backus–Naur Form (BNF), that you
can use to form filter expressions.
The following notational conventions are used:
❏ NonTerminals are typeset in italics.

Chapter 5
5-24
❏ 'Terminals' are quoted and typeset in a fixed width font. They are written in
upper case in most cases in the BNF-grammar below, but should be case insensi-
tive.
❏ TOKENS are typeset in bold.
❏ The notation (element // ',') represents a non-empty, comma-separated
list of elements.
Expression ::= FilterExpression
| TopicExpression
| QueryExpression
.
FilterExpression ::= Condition
TopicExpression ::= SelectFrom { Where } ';'
QueryExpression ::= { Condition }{ 'ORDER BY' (FIELDNAME // ',') }
.
SelectFrom ::= 'SELECT' Aggregation 'FROM' Selection
.
Aggregation ::= '*'
| (SubjectFieldSpec // ',')
.
SubjectFieldSpec ::= FIELDNAME
| FIELDNAME 'AS' IDENTIFIER
| FIELDNAME IDENTIFIER
.
Selection ::= TOPICNAME
| TOPICNAME NaturalJoin JoinItem
.
JoinItem ::= TOPICNAME
| TOPICNAME NaturalJoin JoinItem
| '(' TOPICNAME NaturalJoin JoinItem ')'
.
NaturalJoin ::= 'INNER JOIN'
| 'INNER NATURAL JOIN'
| 'NATURAL JOIN'
| 'NATURAL INNER JOIN'
.
Where ::= 'WHERE' Condition
.
Condition ::= Predicate
| Condition 'AND' Condition
| Condition 'OR' Condition
| 'NOT' Condition
| '(' Condition ')'

5.4 ContentFilteredTopics
5-25
5. Topics
.
Predicate ::= ComparisonPredicate
| BetweenPredicate
.
ComparisonPredicate ::= ComparisonTerm RelOp ComparisonTerm
.
ComparisonTerm ::= FieldIdentifier
| Parameter
.
BetweenPredicate ::= FieldIdentifier 'BETWEEN' Range
| FieldIdentifier 'NOT BETWEEN' Range
.
FieldIdentifier ::= FIELDNAME
| IDENTIFIER
.
RelOp ::= '=' | '>' | '>=' | '<' | '<=' | '<>' | 'LIKE' |
'MATCH'
.
Range ::= Parameter 'AND' Parameter
.
Parameter ::= INTEGERVALUE
| CHARVALUE
| FLOATVALUE
| STRING
| ENUMERATEDVALUE
| BOOLEANVALUE
| PARAMETER
.
Note:
INNER JOIN, INNER NATURAL JOIN, NATURAL JOIN, and NATURAL INNER
JOIN are all aliases, in the sense that they have the same semantics. They are all
supported because they all are part of the SQL standard.
5.4.6.2 Token Expressions
The syntax and meaning of the tokens used in SQL grammar is described as follows:
IDENTIFIER—An identifier for a FIELDNAME, defined as any series of characters 'a',
..., 'z', 'A', ..., 'Z', '0', ..., '9', '_'
but may not start with a digit.
IDENTIFIER: LETTER (PART_LETTER)*
where LETTER: [ "A"-"Z","_","a"-"z" ]
PART_LETTER: [ "A"-"Z","_","a"-"z","0"-"9" ]
Chapter 5
5-26
FIELDNAME
—A reference to a field in the data structure. A dot '.' is used to navigate
through nested structures. The number of dots that may be used in a FIELD-
NAME is unlimited. The FIELDNAME can refer to fields at any depth in the data
structure. The names of the field are those specified in the IDL definition of the
corresponding structure, which may or may not match the fieldnames that appear
on the language-specific (e.g., C/C++, Java) mapping of the structure. To refer-
ence the n+1 element in an array or sequence, use the notation
'[n]', where n is a
natural number (zero included). FIELDNAME must resolve to a primitive IDL
type; that is either boolean, octet, (unsigned) short, (unsigned) long, (unsigned)
long long, float double, char, wchar, string, wstring, or enum.
FIELDNAME: FieldNamePart ( "." FieldNamePart )*
where FieldNamePart : IDENTIFIER ( "[" Index "]" )*
Index> : (["0"-"9"])+
| ["0x","0X"](["0"-"9", "A"-"F", "a"-"f"])+
Primitive IDL types referenced by FIELDNAME are treated as different types in
Predicate according to the following table:
TOPICNAME—An identifier for a topic, and is defined as any series of characters 'a',
..., 'z', 'A', ..., 'Z', '0', ..., '9', '_'
but may not start with a
digit.
TOPICNAME : IDENTIFIER
INTEGERVALUE—Any series of digits, optionally preceded by a plus or minus sign, repre-
senting a decimal integer value within the range of the system. A hexadecimal
number is preceded by
0x and must be a valid hexadecimal expression.
INTEGERVALUE : (["+","-"])? (["0"-"9"])+ [("L","l")]?
| (["+","-"])? ["0x","0X"](["0"-"9",
"A"-"F", "a"-"f"])+ [("L","l")]?
Predicate Data Type IDL Type
BOOLEANVALUE boolean
INTEGERVALUE octet, (unsigned) short, (unsigned) long, (unsigned) long long
FLOATVALUE float, double
CHARVALUE char, wchar
STRING string, wstring
ENUMERATEDVALUE enum

5.4 ContentFilteredTopics
5-27
5. Topics
CHARVALUE—A single character enclosed between single quotes.
CHARVALUE : "'" (~["'"])? "'"
FLOATVALUE—Any series of digits, optionally preceded by a plus or minus sign and
optionally including a floating point (
'.'). A power-of-ten expression may be
postfixed, which has the syntax
en or En, where n is a number, optionally pre-
ceded by a plus or minus sign.
FLOATVALUE : (["+","-"])? (["0"-"9"])* (".")? (["0"-"9"])+
(EXPONENT)?
where EXPONENT: ["e","E"] (["+","-"])? (["0"-"9"])+
STRING
—Any series of characters encapsulated in single quotes, except the single quote
itself.
STRING : "'" (~["'"])* "'"
ENUMERATEDVALUE—A reference to a value declared within an enumeration. Enumer-
ated values consist of the name of the enumeration label enclosed in single
quotes. The name used for the enumeration label must correspond to the label
names specified in the IDL definition of the enumeration.
ENUMERATEDVALUE : "'" ["A" - "Z", "a" - "z"]
["A" - "Z", "a" - "z", "_", "0" - "9"]* "'"
BOOLEANVALUE—Can either be 'TRUE' or 'FALSE', and is case insensitive.
BOOLEANVALUE : ["TRUE","FALSE"]
PARAMETER—Takes the form %n, where n represents a natural number (zero included)
smaller than 100. It refers to the (n + 1)th argument in the given context. This
argument can only be in primitive type value format. It cannot be a FIELDNAME.
PARAMETER : "%" (["0"-"9"])+
5.4.6.3 Type Compatibility in the Predicate
As seen in Table 5.6, only certain combinations of type comparisons are valid in the
Predicate.
5.4.6.4 SQL Extension: Regular Expression Matching
The relational operator MATCH may only be used with string fields. The right-hand
operator is a string pattern. A string pattern specifies a template that the left-hand field
must match.
Chapter 5
5-28
MATCH is case-sensitive. These characters have special meaning: ,/?*[]-^!\%
The pattern allows limited "wild card" matching under the rules in Table 5.7 on page 5-
28.
The syntax is similar to the POSIX
®
fnmatch syntax
1
. The MATCH syntax is also similar
to the 'subject' strings of TIBCO Rendezvous®. Some example expressions include:
"symbol MATCH 'NASDAQ/[A-G]*'"
"symbol MATCH 'NASDAQ/GOOG,NASDAQ/MSFT'"
Table 5.6 Valid Type Comparisons
BOOLEAN
VALUE
INTEGER
VA L U E
FLOAT
VA L U E
CHAR
VA L U E S T R I N G
ENUMERATED
VALUE
BOOLEAN
YES
INTEGERVALUE
YES YES
FLOATVALUE
YES YES
CHARVALUE
YES YES YES
STRING
YES YES
a
YES
ENUMERATED
VA L U E
YES YES
b
YES
b
YES
c
a. See Section 5.4.6.4.
b. Because of the formal notation of the Enumeration values, they are compatible with string
and char literals, but they are not compatible with string or char variables, i.e.,
"MyEnum='EnumValue'" is correct, but "MyEnum=MyString" is not allowed.
c. Only for same-type Enums.
1. See http://www.opengroup.org/onlinepubs/000095399/functions/fnmatch.html.
Table 5.7
Wild Card Matching
Character Meaning
,
A
, separates a list of alternate patterns. The field string is matched if it
matches one or more of the patterns.
/
A / in the pattern string matches a / in the field string. It separates a
sequence of mandatory substrings.

5.4 ContentFilteredTopics
5-29
5. Topics
5.4.6.5 Composite Members
Any member can be used in the filter expression, with the following exceptions:
❏ 128-bit floating point numbers (long doubles) are not supported
❏ bitfields are not supported
❏ LIKE is not supported
Composite members are accessed using the familiar dot notation, such as "
x.y.z > 5".
For unions, the notation is special due to the nature of the IDL union type.
On the publishing side, you can access the union discriminator with myunion._d and
the actual member with myunion._u.mymember. If you want to use a ContentFiltered-
Topic on the subscriber side and filter a sample with a top-level union, you can access
the union discriminator directly with _d and the actual member with mymember in the
filter expression.
5.4.6.6 Strings
The filter expression and parameters can use IDL strings. String constants must appear
between single quotation marks (
').
For example:
" fish = 'salmon' "
?
A ? in the pattern string matches any single non-special characters in the
field string.
*
A * in the pattern string matches 0 or more non-special characters in
field string.
% This special character is used to designate filter expression parameters.
\ (Not supported) Escape character for special characters.
[charlist] Matches any one of the characters in charlist.
[!charlist] or
[^charlist]
(Not supported) Matches any one of the characters not in charlist.
[s-e] Matches any character from s to e, inclusive.
[!s-e] or [^s-e] (Not supported) Matches any character not in the interval s to e.
Table 5.7 Wild Card Matching
Character Meaning

Chapter 5
5-30
5.4.6.7 Enumerations
A filter expression can use enumeration values, such as GREEN, instead of the numeri-
cal value. For example, if x is an enumeration of GREEN, YELLOW and RED, the fol-
lowing expressions are valid:
"x = 'GREEN'"
"X < 'RED'"
5.4.6.8 Pointers
Pointers can be used in filter expressions and are automatically dereferenced to the cor-
rect value.
For example:
struct Point {
long x;
long y;
};
struct Rectangle {
Point *u_l;
Point *l_r;
};
The following expression is valid on a Top ic of type Rectangle:
"u_l.x > l_r.x"
5.4.6.9 Arrays
Arrays are accessed with the familiar [] notation.
For example:
struct ArrayType {
long value[255][5];
};
The following expression is valid on a Top ic of type ArrayType:
"value[244][2] = 5"

5.4 ContentFilteredTopics
5-31
5. Topics
5.4.6.10 Sequences
Sequence elements can be accessed using the () or [] notation.
For example:
struct SequenceType {
sequence<long> s;
};
The following expressions are valid on a Topic of type SequenceType:
"s(1) = 5"
"s[1] = 5"
5.4.6.11 Example SQL Filter Expressions
Assume that you have a Topic with two floats, X and Y, which are the coordinates of an
object moving inside a rectangle measuring 200 x 200 units. This object moves quite a
bit, generating lots of samples that you are not interested in. Instead you only want to
receive samples outside the middle of the rectangle, as seen in Figure 5.5. That is, you
want to filter out data points in the gray box.
Figure 5.5 Filtering Example

Chapter 5
5-32
The filter expression would look like this (remember the expression is written so that
samples that we do want will pass):
"(X < 50 or X > 150) and (Y < 50 or Y > 150)"
While this filter works, it cannot be changed after the ContentFilteredTopic has been cre-
ated. Suppose you would like the ability to adjust the coordinates that are considered
outside the acceptable range (changing the size of the gray box). You can achieve this by
using filter parameters. An more flexible way to write the expression is this:
"(X < %0 or X > %1) and (Y < %2 or Y > %3)"
Recall that when you create a ContentFilteredTopic (see Section 5.4.3), you pass a
expression_parameters string sequence as one of the parameters. Each element in the
string sequence corresponds to one argument.
See the String and Sequence Support sections of the online documentation (from the
Modules page, select Infrastructure).
In C++, the filter parameters could be assigned like this:
FilterParameter[0] = "50";
FilterParameter[1] = "150";
FilterParameter[2] = "50";
FilterParameter[3] = "150";
With these parameters, the filter expression is identical to the first approach. However, it
is now possible to change the parameters by calling set_expression_parameters(). For
example, perhaps you decide that you only want to see data points where X < 10 or X >
190. To make this change:
FilterParameter[0] = 10
FilterParameter[1] = 190
set_expression_parameters(....)
Note:
The new filter parameters will affect all DataReaders that have been created with
this ContentFilteredTopic.
5.4.7 STRINGMATCH Filter Expression Notation
The STRINGMATCH Filter is a subset of the SQL filter; it only supports the MATCH
relational operator on a single string field. It is introduced mainly for the use case of
partitioning data according to channels in the DataWriter's MULTI_CHANNEL QosPol-
icy (DDS Extension) (Section 6.5.12) in Market Data applications.
A STRINGMATCH filter expression has the following syntax:
<field name> MATCH <string pattern>

5.4 ContentFilteredTopics
5-33
5. Topics
The relational operator MATCH may only be used with string fields. The right-hand
operator is a constant string pattern or the filter parameter %0. A string pattern specifies
a template that the left-hand string (subject string) must match. See Section 5.4.6.4 for a
description of the string pattern format.
5.4.7.1 Example STRINGMATCH Filter Expressions
❏ This expression evaluates to TRUE if the value of symbol is equal to NASDAQ/
MSFT:
symbol MATCH 'NASDAQ/MSFT'
❏ This expression evaluates to TRUE if the value of symbol is equal to NASDAQ/
IBM or NASDAQ/MSFT:
symbol MATCH 'NASDAQ/IBM, NASDAQ/MSFT'
❏ This expression evaluates to TRUE if the value of symbol corresponds to NAS-
DAQ and starts with a letter between M and Y:
symbol MATCH 'NASDAQ/[M-Y]*'
5.4.7.2 STRINGMATCH Filter Expression Parameters
Filter expression parameters are provided to the ContentFilteredTopic as a string
sequence (see Section 5.4.3 and Section 5.4.5).
Each parameter corresponds to a positional argument in the filter expression: element 0
corresponds to positional argument 0, element 1 to positional argument 1, and so forth.
In the builtin SQL filter, parameters have the syntax
%<parameter index> and must be
specified explicitly. For example:
position.x < %0 and position.y > %1
In the builtin STRINGMATCH filter, there is always a parameter, the parameter 0. The
parameter can be specified explicitly using the same syntax of the SQL filter or implic-
itly using a constant string pattern. For example:
symbol MATCH %0 (Explicit parameter)
symbol MATCH IBM (Implicit parameter initialized to IBM)

Chapter 5
5-34
5.4.8 Custom Content Filters
By default, a ContentFilteredTopic will use a SQL-like content filter,
DDS_SQLFILTER_NAME
1
(see SQL Filter Expression Notation (Section 5.4.6)), which
implements a superset of the DDS-specified content filter. There is another builtin filter,
DDS_STRINGMATCHFILTER_NAME (see STRINGMATCH Filter Expression Nota-
tion (Section 5.4.7)). Both of these are automatically registered.
If you want to use a different filter, you must register it first, then create the ContentFil-
teredTopic using create_contentfilteredtopic_with_filter() (see Creating ContentFil-
teredTopics (Section 5.4.3)).
One reason to use a custom filter is that the default filter can only filter based on rela-
tional operations between topic members, not on a computation involving topic mem-
bers. For example, if you want to filter based on the sum of the members, you must
create your own filter.
Notes:
❏ The API for using a custom content filter is subject to change in a future release.
❏ Custom content filters are not supported when using the .NET APIs.
5.4.8.1 Registering a Custom Filter
To register a new filter, use the DomainParticipant’s register_contentfilter() operation
2
:
DDS_ReturnCode_t register_contentfilter(const char * filter_name,
const DDSContentFilter * contentfilter)
)
filter_name
The name of the filter. The name must be unique within the DomainPartici-
pant. The filter_name cannot have a length of 0. The same filtering functions and
handle can be registered under different names.
content_filter This class specifies the functions that will be used to process the filter.
You must derive from the DDSContentFilter base class and implement the virtual
compile, evaluate and finalize functions described below. An instance of the
derived class is then used as an argument when calling register_contentfilter().
❏ compile The function that will be used to compile a filter expression and
parameters. RTI Data Distribution Service will call this function when a Content-
FilteredTopic is created and when the filter parameters are changed. This param-
eter cannot be NULL. See Section 5.4.8.4 for details.
1. See the DDS specification for details.
2. This operation is an extension to the DDS standard.

5.4 ContentFilteredTopics
5-35
5. Topics
❏ evaluate The function that will be called by RTI Data Distribution Service each
time a sample is received. Its purpose is to evaluate the sample based on the fil-
ter. This parameter cannot be NULL. See Section 5.4.8.5 for details.
❏ finalize The function that will be called by RTI Data Distribution Service when an
instance of the custom content filter is no longer needed. This parameter may be
NULL. See Section 5.4.8.6 for details.
5.4.8.2 Unregistering a Custom Filter
To unregister a filter, use the DomainParticipant’s unregister_contentfilter() operation
1
,
which is useful if you want to reuse a particular filter name. (Note: You do not have to
unregister the filter before deleting the parent DomainParticipant. If you do not need to
reuse the filter name to register another filter, there is no reason to unregister the filter.)
DDS_ReturnCode_t unregister_contentfilter(const char * filter_name)
filter_name The name of the previously registered filter. The name must be unique
within the DomainParticipant. The filter_name cannot have a length of 0.
If you attempt to unregister a filter that is still being used by a ContentFiltered-
Topic, unregister_contentfilter() will return PRECONDITION_NOT_MET.
If there are still existing discovered DataReaders with the same filter_name and
the filter's compile() method has previously been called on the discovered
DataReaders, the filter’s finalize() method will be called on those discovered
DataReaders before the content filter is unregistered. This means filtering will be
performed on the application that is creating the DataReader.
5.4.8.3 Retrieving a ContentFilter
If you know the name of a ContentFilter, you can get a pointer to its structure. If the
ContentFilter has been already been registered, this operation will return NULL.
DDS_ContentFilter *lookup_contentfilter (const char * filter_name)
5.4.8.4 Compile Function
The compile function specified in the ContentFilter will be used to compile a filter
expression and parameters. Please note that the term ‘compile’ is intentionally defined
very broadly. It is entirely up to you, as the user, to decide what this function should do.
1. This operation is an extension to the DDS standard.

Chapter 5
5-36
The only requirement is that the error_code parameter passed to the compile function
must return OK on successful execution. For example:
DDS_ReturnCode_t sample_compile_function(
void ** new_compile_data,
const char * expression,
const DDS_StringSeq & parameters,
const DDS_TypeCode * type_code,
const char * type_class_name,
void * old_compile_data)
{
*new_compile_data = (void*)DDS_String_dup(parameters[0]);
return DDS_RETCODE_OK;
}
new_compile_data
A user-specified opaque pointer of this instance of the content fil-
ter. This value is passed to evaluate() and finalize().
expression An ASCIIZ string with the filter expression the ContentFilteredTopic was
created with. Note that the memory used by the parameter pointer is owned by
RTI Data Distribution Service. If you want to manipulate this string, you must make
a copy of it first. Do not free the memory for this string.
parameters A string sequence of expression parameters used to create the ContentFil-
teredTopic. The string sequence is equal (but not identical) to the string sequence
passed to create_contentfilteredtopic() (see expression_parameters in
Section 5.4.3).
Important: The sequence passed to the compile function is owned by RTI Data Dis-
tribution Service and must not be referred to outside the compile() function.
type_code A pointer to the type code of the related Topic. A type code is a description
of the topic members, such as their type (long, octet, etc.), but does not contain
any information with respect to the memory layout of the structures. The type
code can be used to write filters that can be used with any type. See Using Gener-
ated Types without RTI Data Distribution Service (Standalone) (Section 3.7).
[Note: if you are using the Java API, this parameter will always be NULL.]
type_class_name Fully qualified class name of the related Topic.
old_compile_data The new_compile_data value from a previous call to this instance of
a content filter. If compile() is called more than once for an instance of a Content-
FilteredTopic (such as if the expression parameters are changed), then the
new_compile_data value returned by the previous invocation is passed in the

5.4 ContentFilteredTopics
5-37
5. Topics
old_compile_data parameter (which can be NULL). If this is a new instance of the
filter, NULL is passed. This parameter is useful for freeing or reusing previously
allocated resources.
5.4.8.5 Evaluate Function
The evaluate function specified in the ContentFilter will be called each time a sample is
received. This function’s purpose is to determine if a sample should be filtered out (not
put in the receive queue).
For example:
DDS_Boolean sample_evaluate_function(
void* compile_data, const void* sample) {
char *parameter = (char*)compile_data;
DDS_Long x;
Foo *foo_sample = (Foo*)sample;
sscanf(parameter,"%d",&x);
return (foo_sample->x > x ? DDS_BOOLEAN_FALSE :
DDS_BOOLEAN_TRUE);
}
The function may use the following parameters:
compile_data The last return value from the compile function for this instance of the
content filter. Can be NULL.
sample A pointer to a C structure with the data to filter. Note that the evaluate func-
tion always receives deserialized data.
5.4.8.6 Finalize Function
The finalize function specified in the ContentFilter will be called when an instance of the
custom content filter is no longer needed. When this function is called, it is safe to free
all resources used by this particular instance of the custom content filter.
For example:
void sample_finalize_function ( void* compile_data) {
/* free parameter string from compile function */
DDS_String_free((char *)compile_data);
}


6-1
6. Sending Data
Chapter 6 Sending Data
This chapter discusses how to create, configure, and use Publishers and DataWriters to
send data. It describes how these entities interact, as well as the types of operations that
are available for them.
This chapter includes the following sections:
❏ Preview: Steps to Sending Data (Section 6.1)
❏ Publishers (Section 6.2)
❏ DataWriters (Section 6.3)
❏ Publisher/Subscriber QosPolicies (Section 6.4)
❏ DataWriter QosPolicies (Section 6.5)
❏ Flow Controllers (DDS Extension) (Section 6.6)
The goal of this chapter is to help you become familiar with the Entities you need for
sending data. For up-to-date details such as formal parameters and return codes on any
mentioned operations, please see the online documentation.
6.1 Preview: Steps to Sending Data
To send samples of a data instance:
1. Create and configure the required Entities:
a. Create a DomainParticipant.
b. Register user data types
1
with the DomainParticipant. For example, the ‘Foo-
DataType’.

Chapter 6
6-2
c. Use the DomainParticipant to create a Topic with the registered data type.
d. Optionally
1
, use the DomainParticipant to create a Publisher.
e. Use the Publisher or DomainParticipant to create a DataWriter for the Topic.
f. Use a type-safe method to cast the generic DataWriter created by the Publisher
to a type-specific DataWriter. For example, ‘FooDataWriter’.
g. Optionally, register data instances with the DataWriter. If the Topic’s user data
type contain key fields, then registering a data instance (data with a specific
key value) will improve performance when repeatedly sending data with the
same key. You may register many different data instances; each registration
will return an instance handle corresponding to the specific key value. For non-
keyed data types, instance registration has no effect. See Section 2.2.2 for
more information on keyed data types and instances.
2. Every time there is changed data to be published:
a. Store the data in a variable of the correct data type (for instance, variable ‘Foo’
of the type ‘FooDataType’).
b. Call the FooDataWriter’s write() operation, passing it a reference to the vari-
able ‘Foo’. For non-keyed data types or for non-registered instances, also pass
in DDS_HANDLE_NIL.
For keyed data types, you should pass in the instance handle corresponding
to the instance stored in ‘Foo’, if you have registered the instance previously.
This means that the data stored in ‘Foo’ has the same key value that was used
to create instance handle.
c. The write() function will take a snapshot of the contents of ‘Foo’ and store it
in RTI Data Distribution Service internal buffers from where the data sample is
sent under the criteria set by the Publisher’s and DataWriter’s QosPolicies. If
there are matched DataReaders, then the data sample will have been passed to
the physical transport plug-in/device driver by the time that write() returns.
1. Type registration is not required for built-in types (see Section 3.2.1).
1. You are not required to explicitly create a Publisher; instead, you can use the 'implicit Publisher' created
from the DomainParticipant. See Creating Publishers Explicitly vs. Implicitly (Section 6.2.1).

6.2 Publishers
6-3
6. Sending Data
6.2 Publishers
An application that intends to publish information needs the following DDS Entities:
DomainParticipant, Topic, Publisher, and DataWriter. All DDS Entities have a correspond-
ing specialized Listener and a set of QosPolicies. A Listener is how RTI Data Distribution
Service notifies your application of status changes relevant to the DDS Entity. The
QosPolicies allow your application to configure the behavior and resources of the DDS
Entity.
❏ A DomainParticipant defines the domain in which the information will be made
available.
❏ A Topic defines the name under which the data will be published, as well as the
type (format) of the data itself.
❏ An application writes data using a DataWriter. The DataWriter is bound at cre-
ation time to a Topic, thus specifying the name under which the DataWriter will
publish the data and the type associated with the data. The application uses the
DataWriter’s write() operation to indicate that a new value of the data is avail-
able for dissemination.
❏ A Publisher manages the activities of several DataWriters. The Publisher deter-
mines when the data is actually sent to other applications. Depending on the set-
tings of various QosPolicies of the Publisher and DataWriter, data may be
buffered to be sent with the data of other DataWriters or not sent at all. By
default, the data is sent as soon as the DataWriter’s write() function is called.
You may have multiple Publishers, each managing a different set of DataWriters,
or you may choose to use one Publisher for all your DataWriters.
For more information, see Creating Publishers Explicitly vs. Implicitly (Section
6.2.1).
Figure 6.1 on page 6-4 shows how these Entities are related, as well as the methods
defined for each Entity.
Publishers are used to perform the operations listed in Table 6.1 on page 6-5. You can
find more information about the operations by looking in the section listed under the
Reference column. For details such as formal parameters and return codes, please see
the online documentation.
Note: Some operations cannot be used within a listener callback, see Restricted Opera-
tions in Listener Callbacks (Section 4.5.1).
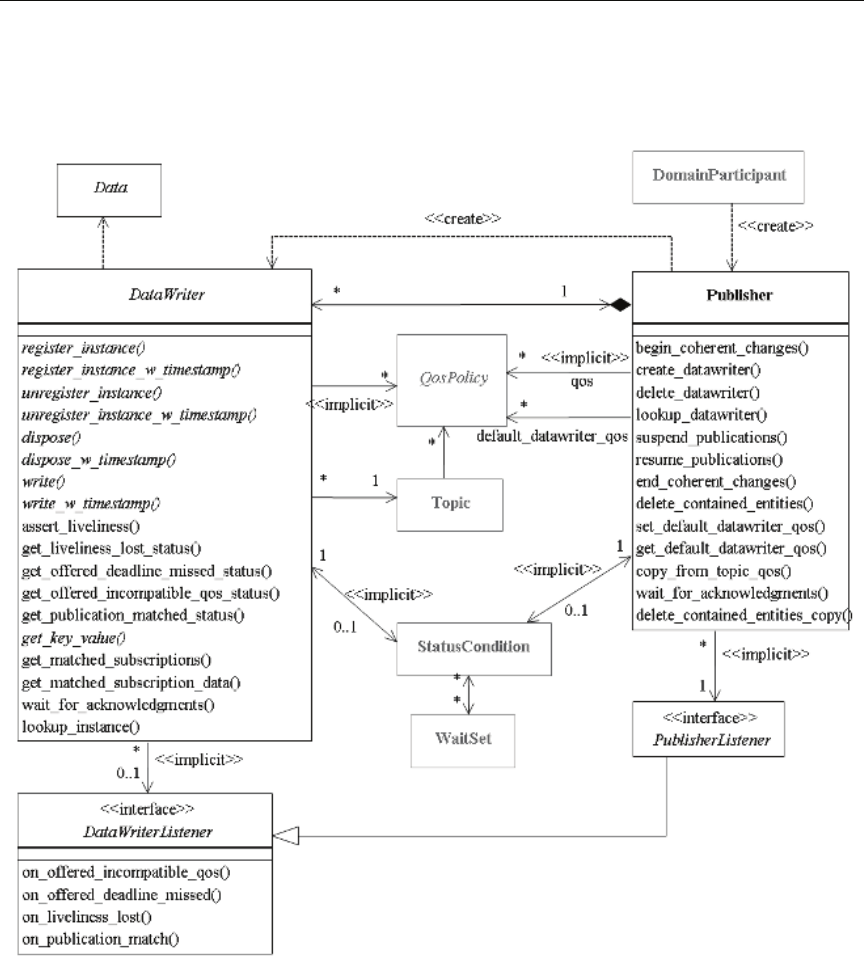
Chapter 6
6-4
Figure 6.1 DDS Publication Module

6.2 Publishers
6-5
6. Sending Data
Table 6.1 Publisher Operations
Working
with ...
Operation Description Reference
DataWriters
begin_coherent_
changes
Indicates that the application will begin a
coherent set of modifications.
Section 6.3.9
create_datawriter
Creates a DataWriter that will belong to the
Publisher.
Section 6.3.1
create_datawriter_
with_profile
Sets the DataWriter’s QoS based on a speci-
fied QoS profile.
copy_from_topic_qos
Copies relevant QosPolicies from a Topic
into a DataWriterQoS structure.
Section 6.2.4.5
delete_contained_
entities
Deletes all of the DataWriters that were cre-
ated by the Publisher.
Section 6.2.3.1
delete_datawriter
Deletes a DataWriter that belongs to the
Publisher.
Section 6.3.2
end_coherent_changes
Ends the coherent set initiated by
begin_coherent_changes().
Section 6.3.9
get_default_
datawriter_qos
Copies the Publisher’s default DataWriter-
QoS values into a DataWriterQos structure.
Section 6.3.12
get_status_changes
Will always return 0 since there are no Sta-
tuses currently defined for Publishers.
Section 4.1.4
lookup_datawriter
Retrieves a DataWriter previously created
for a specific Topic.
Section 6.2.6
set_default_datawriter_
qos
Sets or changes the default DataWriterQos
values.
Section 6.2.4.4
set_default_datawriter_
qos_with_profile
Sets or changes the default DataWriterQos
values based on a QoS profile.
Libraries
and Profiles
get_default_library
Gets the Publisher’s default QoS profile
library.
Section 6.2.4.3
get_default_profile Gets the Publisher’s default QoS profile.
get_default_profile_
library
Gets the library that contains the Publisher’s
default QoS profile.
set_default_library Sets the default library for a Publisher.
set_default_profile Sets the default profile for a Publisher.
Participants
get_participant
Gets the DomainParticipant that was used to
create the Publisher.
Section 6.2.6

Chapter 6
6-6
6.2.1 Creating Publishers Explicitly vs. Implicitly
To send data, your application must have a Publisher. However, you are not required to
explicitly create one. If you do not create one, the middleware will implicitly create a
Publisher the first time you create a DataWriter using the DomainParticipant’s operations.
It will be created with default QoS (DDS_PUBLISHER_QOS_DEFAULT) and no Lis-
tener.
A Publisher (implicit or explicit) gets its own default QoS and the default QoS for its
child DataWriters from the DomainParticipant. These default QoS are set when the Pub-
lisher is created. (This is true for Subscribers and DataReaders, too.)
The 'implicit Publisher' can be accessed using the DomainParticipant’s
get_implicit_publisher() operation (see Section 8.3.9). You can use this ‘implicit Pub-
Publishers
enable Enables the Publisher. Section 4.1.2
get_qos
Gets the Publisher’s current QosPolicy set-
tings. This is most often used in prepara-
tion for calling set_qos().
Section 6.2.4
set_qos
Sets the Publisher’s QoS. You can use this
operation to change the values for the Pub-
lisher’s QosPolicies. Note, however, that not
all QosPolicies can be changed after the
Publisher has been created.
set_qos_with_profile
Sets the Publisher’s QoS based on a speci-
fied QoS profile.
get_listener Gets the currently installed Listener.
Section 6.2.5
set_listener
Sets the Publisher’s Listener. If you created
the Publisher without a Listener, you can
use this operation to add one later.
suspend_publications
Provides a hint that multiple data-objects
within the Publisher are about to be writ-
ten. RTI Data Distribution Service does not
currently use this hint.
Section 6.2.9
resume_publications
Reverses the action of
suspend_publications().
Table 6.1 Publisher Operations
Working
with ...
Operation Description Reference

6.2 Publishers
6-7
6. Sending Data
lisher’ just like any other Publisher (it has the same operations, QosPolicies, etc.). So you
can change the mutable QoS and set a Listener if desired.
DataWriters are created by calling create_datawriter() or
create_datawriter_with_profile()—these operations exist for DomainParticipants and
Publishers. If you use the DomainParticipant to create a DataWriter, it will belong to the
implicit Publisher. If you use a Publisher to create a DataWriter, it will belong to that Pub-
lisher.
The middleware will use the same implicit Publisher for all DataWriters that are created
using the DomainParticipant’s operations.
Having the middleware implicitly create a Publisher allows you to skip the step of creat-
ing a Publisher. However, having all your DataWriters belong to the same Publisher can
reduce the concurrency of the system because all the write operations will be serialized.
6.2.2 Creating Publishers
Before you can explicitly create a Publisher, you need a DomainParticipant (see
Section 8.3). To create a Publisher, use the DomainParticipant’s create_publisher() or
create_publisher_with_profile() operations:
DDSPublisher * create_publisher (const DDS_PublisherQos &qos,
DDSPublisherListener *listener,
DDS_StatusMask mask)
DDSPublisher * create_publisher_with_profile (
const char *library_name,
const char *profile_name,
DDSPublisherListener *listener,
DDS_StatusMask mask)
A QoS profile is way to use QoS settings from an XML file or string. With this approach,
you can change QoS settings without recompiling the application. For details, see
Chapter 15: Configuring QoS with XML.
qos If you want the default QoS settings (described in the online documentation), use
DDS_PUBLISHER_QOS_DEFAULT for this parameter (see Figure 6.2). If you
want to customize any of the QosPolicies, supply a QoS structure (see Figure 6.3).
The QoS structure for a Publisher is described in Section 6.4.
Note: If you use DDS_PUBLISHER_QOS_DEFAULT, it is not safe to create the
Publisher while another thread may be simultaneously calling
set_default_publisher_qos().

Chapter 6
6-8
listener
Listeners are callback routines. RTI Data Distribution Service uses them to notify
your application when specific events (status changes) occur with respect to the
Publisher or the DataWriters created by the Publisher. The listener parameter may be
set to NULL if you do not want to install a Listener. If you use NULL, the Listener
of the DomainParticipant to which the Publisher belongs will be used instead (if it is
set). For more information on PublisherListeners, see Section 6.2.5.
mask This bit-mask indicates which status changes will cause the Publisher’s Listener
to be invoked. The bits set in the mask must have corresponding callbacks imple-
mented in the Listener. If you use NULL for the Listener, use
DDS_STATUS_MASK_NONE for this parameter. If the Listener implements all
callbacks, use DDS_STATUS_MASK_ALL. For information on statuses, see Lis-
teners (Section 4.4).
library_name A QoS Library is a named set of QoS profiles. See QoS Libraries (Section
15.9). If NULL is used for library_name, the DomainParticipant’s default library is
assumed (see Section 6.2.4.3).
profile_name A QoS profile groups a set of related QoS, usually one per entity. See QoS
Profiles (Section 15.8). If NULL is used for profile_name, the DomainParticipant’s
default profile is assumed and library_name is ignored.
For more examples, see Configuring QoS Settings when the Publisher is Created (Sec-
tion 6.2.4.1).
After you create a Publisher, the next step is to use the Publisher to create a DataWriter for
each Topic, see Section 6.3.1. For a list of operations you can perform with a Publisher, see
Table 6.1 on page 6-5.
Figure 6.2 Creating a Publisher with Default QosPolicies
// create the publisher
DDSPublisher* publisher =
participant->create_publisher(DDS_PUBLISHER_QOS_DEFAULT,
NULL,
DDS_STATUS_MASK_NONE);
if (publisher == NULL) {
// handle error
};

6.2 Publishers
6-9
6. Sending Data
6.2.3 Deleting Publishers
This section applies to both implicitly and explicitly created Publishers.
To delete a Publisher:
1. You must first delete all DataWriters that were created with the Publisher. Use the
Publisher’s delete_datawriter() operation to delete them one at a time, or use the
delete_contained_entities() operation (Section 6.2.3.1) to delete them all at the
same time.
DDS_ReturnCode_t delete_datawriter (DDSDataWriter *a_datawriter)
2. Delete the Publisher by using the DomainParticipant’s delete_publisher() opera-
tion.
DDS_ReturnCode_t delete_publisher (DDSPublisher *p)
Note: A Publisher cannot be deleted within a Listener callback, see Restricted Operations
in Listener Callbacks (Section 4.5.1).
6.2.3.1 Deleting Contained DataWriters
The Publisher’s delete_contained_entities() operation deletes all the DataWriters that
were created by the Publisher.
DDS_ReturnCode_t delete_contained_entities ()
After this operation returns successfully, the application may delete the Publisher (see
Section 6.2.3).
6.2.4 Setting Publisher QosPolicies
A Publisher’s QosPolicies control its behavior. Think of the policies as the configuration
and behavior ‘properties’ of the Publisher. The DDS_PublisherQos structure has the fol-
lowing format:
DDS_PublisherQos struct {
DDS_PresentationQosPolicy presentation;
DDS_PartitionQosPolicy partition;
DDS_GroupDataQosPolicy group_data;
DDS_EntityFactoryQosPolicy entity_factory;
DDS_AsynchronousPublisherQosPolicy asynchronous_publisher;
DDS_ExclusiveAreaQosPolicy exclusive_area;
} DDS_PublisherQos;

Chapter 6
6-10
Note:
set_qos() cannot always be used in a listener callback; see Restricted Operations in
Listener Callbacks (Section 4.5.1).
Table 6.2 summarizes the meaning of each policy. (They appear alphabetically in the
table.) For information on why you would want to change a particular QosPolicy, see the
referenced section. For defaults and valid ranges, please refer to the online documenta-
tion for each policy.
6.2.4.1 Configuring QoS Settings when the Publisher is Created
As described in Creating Publishers (Section 6.2.2), there are different ways to create a
Publisher, depending on how you want to specify its QoS (with or without a QoS Pro-
file).
❏ In Figure 6.2 on page 6-8 we saw an example of how to explicitly create a Pub-
lisher with default QosPolicies. It used the special constant,
DDS_PUBLISHER_QOS_DEFAULT, which indicates that the default QoS val-
ues for a Publisher should be used. Default Publisher QosPolicies are configured
in the DomainParticipant; you can change them with the DomainParticipant’s
set_default_publisher_qos() or set_default_publisher_qos_with_profile()
operation (see Section 8.3.6.4).
Table 6.2 Publisher QosPolicies
QosPolicy Description
ASYNCHRONOUS_PUBLISHER
QosPolicy (DDS Extension) (Sec-
tion 6.4.1)
Configures the mechanism that sends user data in an exter-
nal middleware thread.
ENTITYFACTORY QosPolicy
(Section 6.4.2)
Controls whether or not child entities are created in the
enabled state.
EXCLUSIVE_AREA QosPolicy
(DDS Extension) (Section 6.4.3)
Configures multi-thread concurrency and deadlock preven-
tion capabilities.
GROUP_DATA QosPolicy (Sec-
tion 6.4.4)
Along with TOPIC_DATA QosPolicy (Section 5.2.1) and
USER_DATA QosPolicy (Section 6.5.23), this QosPolicy is
used to attach a buffer of bytes to RTI Data Distribution Ser-
vice's discovery meta-data.
PARTITION QosPolicy (Section
6.4.5)
Adds string identifiers that are used for matching DataRead-
ers and DataWriters for the same Topic.
PRESENTATION QosPolicy (Sec-
tion 6.4.6)
Controls how DDS presents data received by an application
to the DataReaders of the data.

6.2 Publishers
6-11
6. Sending Data
❏ To create a Publisher with non-default QoS settings, without using a QoS profile,
see Figure 6.3 on page 6-11. It uses the DomainParticipant’s
get_default_publisher_qos() method to initialize a DDS_PublisherQos struc-
ture. Then the policies are modified from their default values before the QoS
structure is passed to create_publisher().
❏ You can also create a Publisher and specify its QoS settings via a QoS Profile. To
do so, call create_publisher_with_profile(), as seen in Figure 6.4 on page 6-12.
❏ If you want to use a QoS profile, but then make some changes to the QoS before
creating the Publisher, call the DomainParticipantFactory’s
get_publisher_qos_from_profile(), modify the QoS and use the modified QoS
structure when calling create_publisher(), as seen in Figure 6.5 on page 6-12.
For more information, see Creating Publishers (Section 6.2.2) and Chapter 15: Configur-
ing QoS with XML.
DDS_PublisherQos publisher_qos;
1
// get defaults
if (participant->get_default_publisher_qos(publisher_qos) !=
DDS_RETCODE_OK){
// handle error
}
// make QoS changes here
// for example, this changes the ENTITY_FACTORY QoS
publisher_qos.entity_factory.autoenable_created_entities =
DDS_BOOLEAN_FALSE;
// create the publisher
DDSPublisher* publisher =
participant->create_publisher(publisher_qos,
NULL,
DDS_STATUS_MASK_NONE);
if (publisher == NULL) {
// handle error
}
1. For the C API, you need to use DDS_PublisherQos_INITIALIZER or
DDS_PublisherQos_initialize(). See Special QosPolicy Handling Considerations for C (Section 4.2.2)
Figure 6.3
Creating a Publisher with Non-default QosPolicies (not from a profile)

Chapter 6
6-12
// create the publisher with QoS profile
DDSPublisher* publisher =
participant->create_publisher_with_profile(
“MyPublisherLibary”,
“MyPublisherProfile”,
NULL, DDS_STATUS_MASK_NONE);
if (publisher == NULL) {
// handle error
}
Figure 6.4 Creating a Publisher with a QoS Profile
DDS_PublisherQos publisher_qos;
1
// Get publisher QoS from profile
retcode = factory->get_publisher_qos_from_profile(publisher_qos,
“PublisherLibrary”,
“PublisherProfile”);
if (retcode != DDS_RETCODE_OK) {
// handle error
}
// Makes QoS changes here
// New entity_factory autoenable_created_entities will be true
publisher_qos.entity_factory.autoenable_created_entities =
DDS_BOOLEAN_TRUE;
// create the publisher with modified QoS
DDSPublisher* publisher = participant->create_publisher(
“Example Foo”,
type_name,
publisher_qos,
NULL, DDS_STATUS_MASK_NONE);
if (publisher == NULL) {
// handle error
}
1. For the C API, you need to use DDS_PublisherQos_INITIALIZER or DDS_PublisherQos_initialize().
See Special QosPolicy Handling Considerations for C (Section 4.2.2)
Figure 6.5
Getting QoS Values from a Profile, Changing QoS Values, Creating a Publisher with
Modified QoS Values

6.2 Publishers
6-13
6. Sending Data
6.2.4.2 Changing QoS Settings After the Publisher Has Been Created
There are 2 ways to change an existing Publisher’s QoS after it is has been created—again
depending on whether or not you are using a QoS Profile.
❏ To change an existing Publisher’s QoS programmatically (that is, without using a
QoS profile): get_qos() and set_qos(). See the example code in Figure 6.6. It
retrieves the current values by calling the Publisher’s get_qos() operation. Then it
modify the value and call set_qos() to apply the new value. Note, however, that
some QosPolicies cannot be changed after the Publisher has been enabled—this
restriction is noted in the descriptions of the individual QosPolicies.
❏ You can also change a Publisher’s (and all other Entities’) QoS by using a QoS
Profile and calling set_qos_with_profile(). For an example, see Figure 6.7. For
more information, see Chapter 15: Configuring QoS with XML.
DDS_PublisherQos publisher_qos;
1
// Get current QoS. publisher points to an existing DDSPublisher.
if (publisher->get_qos(publisher_qos) != DDS_RETCODE_OK) {
// handle error
}
// make changes
// New entity_factory autoenable_created_entities will be true
publisher_qos.entity_factory.autoenable_created_entities =
DDS_BOOLEAN_TRUE;
// Set the new QoS
if (publisher->set_qos(publisher_qos) != DDS_RETCODE_OK ) {
// handle error
}
1. For the C API, you need to use DDS_PublisherQos_INITIALIZER or
DDS_PublisherQos_Initialize(). See Special QosPolicy Handling Considerations for C (Section 4.2.2)
Figure 6.6
Changing the Qos of an Existing Publisher
retcode = publisher->set_qos_with_profile(
“PublisherProfileLibrary”,”PublisherProfile”);
if (retcode != DDS_RETCODE_OK) {
// handle error
}
Figure 6.7 Changing the QoS of an Existing Publisher with a QoS Profile

Chapter 6
6-14
6.2.4.3 Getting and Setting the Publisher’s Default QoS Profile and Library
You can retrieve the default QoS profile used to create Publishers with the
get_default_profile() operation.
You can also get the default library for Publishers, as well as the library that contains the
Publisher’s default profile (these are not necessarily the same library); these operations
are called get_default_library() and get_default_library_profile(), respectively. These
operations are for informational purposes only (that is, you do not need to use them as a
precursor to setting a library or profile.) For more information, see Chapter 15: Config-
uring QoS with XML.
virtual const char * get_default_library ()
const char * get_default_profile ()
const char * get_default_profile_library ()
There are also operations for setting the Publisher’s default library and profile:
DDS_ReturnCode_t set_default_library (const char * library_name)
DDS_ReturnCode_t set_default_profile (const char * library_name,
const char * profile_name)
These operations only affect which library/profile will be used as the default the next
time a default Publisher library/profile is needed during a call to one of this Publisher’s
operations.
When calling a Publisher operation that requires a profile_name parameter, you can use
NULL to refer to the default profile. (This same information applies to setting a default
library.) If the default library/profile is not set, the Publisher inherits the default from the
DomainParticipant.
set_default_profile() does not set the default QoS for DataWriters created by the Pub-
lisher; for this functionality, use the Publisher’s
set_default_datawriter_qos_with_profile(), see Section 6.2.4.4 (you may pass in NULL
after having called the Publisher’s set_default_profile()).
set_default_profile() does not set the default QoS for newly created Publishers; for this
functionality, use the DomainParticipant’s set_default_publisher_qos_with_profile()
operation, see Section 8.3.6.4.

6.2 Publishers
6-15
6. Sending Data
6.2.4.4 Getting and Setting Default QoS for DataWriters
These operations set the default QoS that will be used for new DataWriters if
create_datawriter() is called with DDS_DATAWRITER_QOS_DEFAULT as the ‘qos’
parameter:
DDS_ReturnCode_t set_default_datawriter_qos (
const DDS_DataWriterQos &qos)
DDS_ReturnCode_t set_default_datawriter_qos_with_profile (
const char *library_name,
const char *profile_name)
The above operations may potentially allocate memory, depending on the sequences
contained in some QoS policies.
To get the default QoS that will be used for creating DataWriters if create_datawriter() is
called with DDS_PARTICIPANT_QOS_DEFAULT as the ‘qos’ parameter:
DDS_ReturnCode_t get_default_datawriter_qos (
DDS_DataWriterQos & qos)
This operation gets the QoS settings that were specified on the last successful call to
set_default_datawriter_qos() or set_default_datawriter_qos_with_profile(), or else, if
the call was never made, the default values listed in DDS_DataWriterQos.
Note: It is not safe to set the default DataWriter QoS values while another thread may be
simultaneously calling get_default_datawriter_qos(), set_default_datawriter_qos(), or
create_datawriter() with DDS_DATAWRITER_QOS_DEFAULT as the qos parameter. It
is also not safe to get the default DataWriter QoS values while another thread may be
simultaneously calling set_default_datawriter_qos(),
6.2.4.5 Other Publisher QoS-Related Operations
❏ Copying a Topic’s QoS into a DataWriter’s QoS This method is provided as a con-
venience for setting the values in a DataWriterQos structure before using that
structure to create a DataWriter. As explained in Section 5.1.3, most of the policies
in a Topic Qos structure do not apply directly to the Topic itself, but to the associ-
ated DataWriters and DataReaders of that Topic. The Top ic Qos serves as a single
container where the values of QosPolicies that must be set compatibly across
matching DataWriters and DataReaders can be stored.

Chapter 6
6-16
Thus instead of setting the values of the individual QosPolicies that make up a
DataWriterQos structure every time you need to create a DataWriter for a Topic,
you can use the Publisher’s copy_from_topic_qos() operation to “import” the
Top ic ’s QosPolicies into a DataWriterQos structure. This operation copies the rele-
vant policies in the Top ic Qo s to the corresponding policies in the DataWriterQos.
This copy operation will often be used in combination with the Publisher’s
get_default_datawriter_qos() and the Top ic ’s get_qos() operations. The Topic’s
QoS values are merged on top of the Publisher’s default DataWriter QosPolicies
with the result used to create a new DataWriter, or to set the QoS of an existing
one (see Section 6.3.12).
❏ Copying a Publisher’s QoS C API users should use the
DDS_PublisherQos_copy() operation rather than using structure assignment
when copying between two QoS structures. The copy() operation will perform a
deep copy so that policies that allocate heap memory such as sequences are cop-
ied correctly. In C++, C++/CLI, C# and Java, a copy constructor is provided to
take care of sequences automatically.
❏ Clearing QoS-Related Memory Some QosPolicies contain sequences that allo-
cate memory dynamically as they grow or shrink. The C API’s
DDS_PublisherQos_finalize() operation frees the memory used by sequences
but otherwise leaves the QoS unchanged. C API users should call finalize() on
all DDS_PublisherQos objects before they are freed, or for QoS structures allo-
cated on the stack, before they go out of scope. In C++, C++/CLI, C# and Java,
the memory used by sequences is freed in the destructor.
6.2.5 Setting Up PublisherListeners
Like all DDS Entities, Publishers may optionally have Listeners. Listeners are user-defined
objects that implement a DDS-defined interface (i.e. a pre-defined set of callback func-
tions). Listeners provide the means for RTI Data Distribution Service to notify applications
of any changes in Statuses (events) that may be relevant to it. By writing the callback
functions in the Listener and installing the Listener into the Publisher, applications can be
notified to handle the events of interest. For more general information on Listeners and
Statuses, see Section 4.4.
Note: Some operations cannot be used within a listener callback, see Restricted Opera-
tions in Listener Callbacks (Section 4.5.1).
As illustrated in Figure 6.1 on page 6-4, the PublisherListener interface extends the
DataWriterListener interface. In other words, the PublisherListener interface contains all
the functions in the DataWriterListener interface. There are no Publisher-specific statuses,
and thus there are no Publisher-specific functions.

6.2 Publishers
6-17
6. Sending Data
Instead, the methods of a PublisherListener will be called back for changes in the Statuses
of any of the DataWriters that the Publisher has created. This is only true if the DataWriter
itself does not have a DataWriterListener installed, see Section 6.3.3. If a DataWriterLis-
tener has been installed and has been enabled to handle a Status change for the
DataWriter, then RTI Data Distribution Service will call the method of the DataWriterLis-
tener instead.
If you want a Publisher to handle status events for its DataWriters, you can set up a Pub-
lisherListener during the Publisher’s creation or use the set_listener() method after the
Publisher is created. The last parameter is a bit-mask with which you should set which
Status events that the PublisherListener will handle. For example,
DDS_StatusMask mask = DDS_OFFERED_DEADLINE_MISSED_STATUS |
DDS_OFFERED_INCOMPATIBLE_QOS_STATUS;
publisher = participant->create_publisher(DDS_PUBLISHER_QOS_DEFAULT,
listener, mask);
or
DDS_StatusMask mask = DDS_OFFERED_DEADLINE_MISSED_STATUS |
DDS_OFFERED_INCOMPATIBLE_QOS_STATUS;
publisher->set_listener(listener, mask);
As previously mentioned, the callbacks in the PublisherListener act as ‘default’ callbacks
for all the DataWriters contained within. When RTI Data Distribution Service wants to
notify a DataWriter of a relevant Status change (for example,
PUBLICATION_MATCHED), it first checks to see if the DataWriter has the correspond-
ing DataWriterListener callback enabled (such as the on_publication_matched() opera-
tion). If so, RTI Data Distribution Service dispatches the event to the DataWriterListener
callback. Otherwise, RTI Data Distribution Service dispatches the event to the corre-
sponding PublisherListener callback.
A particular callback in a DataWriter is not enabled if either:
❏ The application installed a NULL DataWriterListener (meaning there are no call-
backs for the DataWriter at all).
❏ The application has disabled the callback for a DataWriterListener. This is done by
turning off the associated status bit in the mask parameter passed to the
set_listener() or create_datawriter() call when installing the DataWriterListener
on the DataWriter. For more information on DataWriterListeners, see Section 6.3.3.
Similarly, the callbacks in the DomainParticipantListener act as ‘default’ callbacks for all
the Publishers that belong to it. For more information on DomainParticipantListeners, see
Section 8.3.5.

Chapter 6
6-18
For example, Figure 6.8 shows how to create a Publisher with a Listener that simply
prints the events it receives.
6.2.6 Finding a Publisher’s Related Entities
These Publisher operations are useful for obtaining a handle to related entities:
❏ get_participant(): Gets the DomainParticipant with which a Publisher was created.
❏ lookup_datawriter(): Finds a DataWriter created by the Publisher with a Topic of a
particular name. Note that in the event that multiple DataWriters were created by
the same Publisher with the same Topic, any one of them may be returned by this
method.
❏ DDS_Publisher_as_Entity(): This method is provided for C applications and is
necessary when invoking the parent class Entity methods on Publishers. For
example, to call the Entity method get_status_changes() on a Publisher, my_pub,
do the following:
DDS_Entity_get_status_changes(DDS_Publisher_as_Entity(my_pub))
DDS_Publisher_as_Entity() is not provided in the C++, C++/CLI, C# and Java
APIs because the object-oriented features of those languages make it unneces-
sary.
6.2.7 Waiting for Acknowledgments
The Publisher’s wait_for_acknowledgments() operation blocks the calling thread until
either all data written by the Publisher’s reliable DataWriters is acknowledged by all
matched reliable DataReaders, or else the duration specified by the max_wait parameter
elapses, whichever happens first.
DDS_ReturnCode_t wait_for_acknowledgments
(const DDS_Duration_t & max_wait)
This operation returns DDS_RETCODE_OK if all the samples were acknowledged, or
DDS_RETCODE_TIMEOUT if the max_wait duration expired first.
There is a similar operation available for individual DataWriters, see Section 6.3.10.
The reliability protocol used by RTI Data Distribution Service is discussed in Chapter 10:
Reliable Communications.

6.2 Publishers
6-19
6. Sending Data
Figure 6.8 Example Code to Create a Publisher with a Simple Listener
class MyPublisherListener : public DDSPublisherListener {
public:
virtual void on_offered_deadline_missed(DDSDataWriter* writer,
const DDS_OfferedDeadlineMissedStatus& status);
virtual void on_liveliness_lost(DDSDataWriter* writer,
const DDS_LivelinessLostStatus& status);
virtual void on_offered_incompatible_qos(DDSDataWriter* writer,
const DDS_OfferedIncompatibleQosStatus& status);
virtual void on_publication_matched(DDSDataWriter* writer,
const DDS_PublicationMatchedStatus& status);
virtual void
on_reliable_writer_cache_changed(DDSDataWriter* writer,
const DDS_ReliableWriterCacheChangedStatus& status);
virtual void on_reliable_reader_activity_changed
(DDSDataWriter* writer,
const DDS_ReliableReaderActivityChangedStatus& status);
};
void MyPublisherListener::on_offered_deadline_missed(
DDSDataWriter* writer,
const DDS_OfferedDeadlineMissedStatus& status)
{
printf(“on_offered_deadline_missed\n”);
}
// ...Implement all remaining listeners in a similar manner...
DDSPublisherListener *myPubListener = new MyPublisherListener();
DDSPublisher* publisher = participant->create_publisher(
DDS_PUBLISHER_QOS_DEFAULT,
myPubListener, DDS_STATUS_MASK_ALL);

Chapter 6
6-20
6.2.8 Statuses for Publishers
There are no statuses specific to the Publisher itself. The following statuses can be moni-
tored by the PublisherListener for the Publisher’s DataWriters.
❏ OFFERED_DEADLINE_MISSED Status (Section 6.3.5.4)
❏ LIVELINESS_LOST Status (Section 6.3.5.3)
❏ OFFERED_INCOMPATIBLE_QOS Status (Section 6.3.5.5)
❏ PUBLICATION_MATCHED Status (Section 6.3.5.6)
❏ RELIABLE_WRITER_CACHE_CHANGED Status (DDS Extension) (Section
6.3.5.7)
❏ RELIABLE_READER_ACTIVITY_CHANGED Status (DDS Extension) (Section
6.3.5.8)
6.2.9 Suspending and Resuming Publications
The operations suspend_publications() and resume_publications() provide a hint to
RTI Data Distribution Service that multiple data-objects within the Publisher are about to
be written. RTI Data Distribution Service does not currently use this hint.
6.3 DataWriters
To create a DataWriter, you need a DomainParticipant and a Topic.
You need a DataWriter for each Topic that you want to publish. Once you have a
DataWriter, you can use it to perform the operations listed in Table 6.3. The most impor-
tant operation is write(), described in Section 6.3.7. For more details on all operations,
see the online documentation.
DataWriters are created by using operations on a DomainParticipant or a Publisher, as
described in Section 6.3.1. If you use the DomainParticipant’s operations, the DataWriter
will belong to an implicit Publisher that is automatically created by the middleware. If
you use a Publisher’s operations, the DataWriter will belong to that Publisher. So either
way, the DataWriter belongs to a Publisher.
Note: Some operations cannot be used within a listener callback, see Restricted Opera-
tions in Listener Callbacks (Section 4.5.1).

6.3 DataWriters
6-21
6. Sending Data
Table 6.3 DataWriter Operations
Working
with ...
Operation Description Reference
Data-
Writers
assert_liveliness Manually asserts the liveliness of the DataWriter.
Section 6.3.14
enable Enables the DataWriter.
Section 4.1.2
get_qos Gets the QoS.
Section 6.3.12
lookup_instance
Gets a handle, given an instance. (Useful for keyed
data types only.)
Section 6.3.11.3
set_qos Modifies the QoS.
Section 6.3.12
set_qos_with_profile Modifies the QoS based on a QoS profile. Section 6.3.12
get_listener Gets the currently installed Listener.
Section 6.3.3
set_listener Replaces the Listener.
FooData-
Writer
(See
Section 6.
3.6)
dispose
States that the instance no longer exists. (Useful for
keyed data types only.)
Section 6.3.11.2
dispose_w_timestamp
Same as dispose, but allows the application to over-
ride the automatic source_timestamp. (Useful for
keyed data types only.)
flush Makes the batch available to be sent on the network.
Section 6.3.8
get_key_value Maps an instance_handle to the corresponding key. Section 6.3.11.4
narrow
A type-safe way to cast a pointer. This takes a DDS-
DataWriter pointer and ‘narrows’ it to a ‘Foo-
DataWriter’ where ‘Foo’ is the related data type.
Section 6.3.6
register_instance
States the intent of the DataWriter to write values of
the data-instance that matches a specified key.
Improves the performance of subsequent writes to
the instance. (Useful for keyed data types only.)
Section 6.3.11.1
register_instance_w_
timestamp
Like register_instance, but allows the application to
override the automatic source_timestamp. (Useful
for keyed data types only.)
unregister_instance
Reverses register_instance. Relinquishes the owner-
ship of the instance. (Useful for keyed data types
only.)
unregister_instance_w_
timestamp
Like unregister_instance, but allows the application
to override the automatic source_timestamp. (Useful
for keyed data types only.)
write Writes a new value for a data-instance.
Section 6.3.7
write_w_timestamp Same as write, but allows the application to override
the automatic source_timestamp.

Chapter 6
6-22
Matched
Subscript
ions
get_matched_
subscriptions
Gets a list of subscriptions that have a matching Topic
and compatible QoS. These are the subscriptions cur-
rently associated with the DataWriter.
Section 6.3.13.1
get_matched_
subscription_data
Gets information on a subscription with a matching
Topic and compatible QoS.
get_matched_
subscription_locators
Gets a list of locators for subscriptions that have a
matching Topic and compatible QoS. These are the
subscriptions currently associated with the
DataWriter.
Other
get_publisher Gets the Publisher to which the DataWriter belongs.
Section 6.3.13.2
get_topic Get the Topic associated with the DataWriter.
wait_for_
acknowledgements
Blocks the calling thread until either all data written
by the DataWriter is acknowledged by all matched
Reliable DataReaders, or until the a specified timeout
duration, max_wait, elapses.
Section 6.3.10
Status
get_status_changes
Gets a list of statuses that have changed since the last
time the application read the status or the listeners
were called.
Section 4.1.4
get_liveliness_lost_status Gets LIVELINESS_LOST status.
Section 6.3.5
get_offered_deadline_
missed_status
Gets OFFERED_DEADLINE_MISSED status.
get_offered_
incompatible_qos_status
Gets OFFERED_INCOMPATIBLE_QOS status.
get_publication_match_
status
Gets PUBLICATION_MATCHED_QOS status.
get_reliable_writer_
cache_changed_status
Gets RELIABLE_WRITER_CACHE_CHANGED
status
get_reliable_reader_
activity_changed_status
Gets RELIABLE_READER_ACTIVITY_CHANGED
status
get_datawriter_cache_
status
Gets DATA_WRITER_CACHE_status
get_datawriter_protocol_
status
Gets DATA_WRITER_PROTOCOL status
Table 6.3 DataWriter Operations
Working
with ...
Operation Description Reference

6.3 DataWriters
6-23
6. Sending Data
Status
(cont’d)
get_matched_
subscription_datawriter_
protocol_status
Gets DATA_WRITER_PROTOCOL status for this
DataWriter, per matched subscription identified by the
subscription_handle.
Section 6.3.5
get_matched_
subscription_datawriter_
protocol_status_
by_locator
Gets DATA_WRITER_PROTOCOL status for this
DataWriter, per matched subscription as identified by
a locator.
Table 6.3 DataWriter Operations
Working
with ...
Operation Description Reference

Chapter 6
6-24
6.3.1 Creating DataWriters
Before you can create a DataWriter, you need a DomainParticipant, a Topic, and optionally,
a Publisher.
DataWriters are created by calling create_datawriter() or
create_datawriter_with_profile()—these operations exist for DomainParticipants and
Publishers. If you use the DomainParticipant to create a DataWriter, it will belong to the
implicit Publisher described in Section 6.2.1. If you use a Publisher’s operations to create a
DataWriter, it will belong to that Publisher.
DDSDataWriter* create_datawriter ( DDSTopic *topic,
const DDS_DataWriterQos &qos,
DDSDataWriterListener *listener,
DDS_StatusMask mask)
DDSDataWriter * create_datawriter_with_profile (
DDSTopic * topic,
const char * library_name,
const char * profile_name,
DDSDataWriterListener * listener,
DDS_StatusMask mask)
A QoS profile is way to use QoS settings from an XML file or string. With this approach,
you can change QoS settings without recompiling the application. For details, see
Chapter 15: Configuring QoS with XML.
topic The Topic that the DataWriter will publish. This must have been previously created
by the same DomainParticipant.
qos If you want the default QoS settings (described in the online documentation), use
the constant DDS_DATAWRITER_QOS_DEFAULT for this parameter (see
Figure 6.9). If you want to customize any of the QosPolicies, supply a QoS struc-
ture (see Section 6.3.12).
Note: If you use DDS_DATAWRITER_QOS_DEFAULT for the qos parameter, it
is not safe to create the DataWriter while another thread may be simultaneously
calling the Publisher’s set_default_datawriter_qos() operation.
listener Listeners are callback routines. RTI Data Distribution Service uses them to notify
your application of specific events (status changes) that may occur with respect to
the DataWriter. The listener parameter may be set to NULL; in this case, the Pub-
lisherListener (or if that is NULL, the DomainParticipantListener) will be used
instead. For more information, see Section 6.3.3.

6.3 DataWriters
6-25
6. Sending Data
mask This bit-mask indicates which status changes will cause the Listener to be
invoked. The bits set in the mask must have corresponding callbacks imple-
mented in the Listener. If you use NULL for the Listener, use
DDS_STATUS_MASK_NONE for this parameter. If the Listener implements all
callbacks, use DDS_STATUS_MASK_ALL. For information on statuses, see Lis-
teners (Section 4.4).
library_name A QoS Library is a named set of QoS profiles. See QoS Libraries (Section
15.9).
profile_name A QoS profile groups a set of related QoS, usually one per entity. See QoS
Profiles (Section 15.8).
For more examples on how to create a DataWriter, see Configuring QoS Settings when
the DataWriter is Created (Section 6.3.12.1)
After you create a DataWriter, you can use it to write data. See Section 6.3.7.
Note: When a DataWriter is created, only those transports already registered are avail-
able to the DataWriter. The builtin transports are implicitly registered when (a) the
DomainParticipant is enabled, (b) the first DataWriter is created, or (c) you look up a buil-
tin data reader, whichever happens first.
// MyWriterListener is user defined, extends DDSDataWriterListener
DDSDataWriterListener* writer_listener = new MyWriterListener();
DDSDataWriter* writer = publisher->create_datawriter(
topic,
DDS_DATAWRITER_QOS_DEFAULT,
writer_listener,
DDS_STATUS_MASK_ALL);
if (writer == NULL) {
// ... error
};
// narrow it for your specific data type
FooDataWriter* foo_writer = FooDataWriter::narrow(writer);
Figure 6.9 Creating a DataWriter with Default QosPolicies and a Listener

Chapter 6
6-26
6.3.2 Deleting DataWriters
To delete a single DataWriter, use the Publisher’s delete_datawriter() operation:
DDS_ReturnCode_t delete_datawriter (DDSDataWriter *a_datawriter)
Note: A DataWriter cannot be deleted within its own writer listener callback, see
Restricted Operations in Listener Callbacks (Section 4.5.1)
To delete all of a Publisher’s DataWriters, use the Publisher’s delete_contained_entities()
operation (see Section 6.2.3.1).
6.3.3 Setting Up DataWriterListeners
DataWriters may optionally have Listeners. Listeners are essentially callback routines and
provide the means for RTI Data Distribution Service to notify your application of the
occurrence of events (status changes) relevant to the DataWriter. For more general infor-
mation on Listeners, see Listeners (Section 4.4).
Special instructions for deleting DataWriters if you are using the
‘Timestamp’ APIs and BY_SOURCE_TIMESTAMP Destination Order:
This note only applies when the DataWriter’s
DestinationOrderQosPolicy’s kind is BY_SOURCE_TIMESTAMP.
Calls to delete_datawriter() may fail if your application has previously
used the “with timestamp” APIs (write_w_timestamp(),
register_instance_w_timestamp(), unregister_instance_w_timestamp(),
or dispose_w_timestamp()) with a timestamp that is larger than the time
at which delete_datawriter() is called.
To prevent delete_datawriter() from failing in this situation, either:
❏ Change the WriterDataLifeCycle QoS Policy so that RTI Data
Distribution Service will not autodispose unregistered instances:
writer_qos.writer_data_lifecycle.
autodispose_unregistered_instances =
DDS_BOOLEAN_FALSE;
or
❏ Explicitly call unregister_instance_w_timestamp() for all
instances modified with the *_w_timestamp() APIs before calling
delete_datawriter().
6.3 DataWriters
6-27
6. Sending Data
Note: Some operations cannot be used within a listener callback, see Restricted Opera-
tions in Listener Callbacks (Section 4.5.1).
If you do not implement a DataWriterListener, the associated PublisherListener is used
instead. If that Publisher also does not have a Listener, then the DomainParticipant’s Lis-
tener is used if one exists (see Section 6.2.5 and Section 8.3.5).
Listeners are typically set up when the DataWriter is created (see Section 6.2). You can
also set one up after creation by using the set_listener() operation. RTI Data Distribution
Service will invoke a DataWriter’s Listener to report the status changes listed in Table 6.4
(if the Listener is set up to handle the particular status, see Section 6.3.3).
Table 6.4 DataWriterListener Callbacks
This DataWriterListener
callback...
... is triggered by ...
on_instance_replaced()
A replacement of an existing instance by a new instance;
see Configuring DataWriter Instance Replacement (Sec-
tion 6.5.18.2)
on_liveliness_lost
A change to LIVELINESS_LOST Status (Section
6.3.5.3)
on_offered_deadline_missed
A change to OFFERED_DEADLINE_MISSED Sta-
tus (Section 6.3.5.4)
on_offered_incompatible_qos
A change to OFFERED_INCOMPATIBLE_QOS Sta-
tus (Section 6.3.5.5)
on_publication_matched
A change to PUBLICATION_MATCHED Status
(Section 6.3.5.6)
on_reliable_writer_cache_changed
A change to
RELIABLE_WRITER_CACHE_CHANGED Status
(DDS Extension) (Section 6.3.5.7)
on_reliable_reader_activity_changed
A change to
RELIABLE_READER_ACTIVITY_CHANGED Sta-
tus (DDS Extension) (Section 6.3.5.8)

Chapter 6
6-28
6.3.4 Checking DataWriter Status
You can access an individual communication status for a DataWriter with the operations
shown in Table 6.5.
These methods are useful in the event that no Listener callback is set to receive notifica-
tions of status changes. If a Listener is used, the callback will contain the new status
information, in which case calling these methods is unlikely to be necessary.
The get_status_changes() operation provides a list of statuses that have changed since
the last time the status changes were ‘reset.’ A status change is reset each time the appli-
cation calls the corresponding get_*_status(), as well as each time RTI Data Distribution
Service returns from calling the Listener callback associated with that status.
For more on status, see Setting Up DataWriterListeners (Section 6.3.3), Statuses for
DataWriters (Section 6.3.5), and Listeners (Section 4.4).
Table 6.5 DataWriter Status Operations
Use this operation... ...to retrieve this status:
get_datawriter_cache_status
DATA_WRITER_CACHE_STATUS (Sec-
tion 6.3.5.1)
get_datawriter_protocol_status
DATA_WRITER_PROTOCOL_STATUS
(Section 6.3.5.2)
get_matched_subscription_datawriter_
protocol_status
get_matched_subscription_datawriter_
protocol_status_by_locator
get_liveliness_lost_status
LIVELINESS_LOST Status (Section 6.3.5.3)
get_offered_deadline_missed_status
OFFERED_DEADLINE_MISSED Status
(Section 6.3.5.4)
get_offered_incompatible_qos_status
OFFERED_INCOMPATIBLE_QOS Status
(Section 6.3.5.5)
get_publication_match_status
PUBLICATION_MATCHED Status (Sec-
tion 6.3.5.6)
get_reliable_writer_cache_changed_status
RELIABLE_WRITER_CACHE_CHANGED
Status (DDS Extension) (Section 6.3.5.7)
get_reliable_reader_activity_changed_status
RELIABLE_READER_ACTIVITY_CHANG
ED Status (DDS Extension) (Section 6.3.5.8)
get_status_changes A list of what changed in all of the above.

6.3 DataWriters
6-29
6. Sending Data
6.3.5 Statuses for DataWriters
There are several types of statuses available for a DataWriter. You can use the
get_*_status() operations (Section 6.3.12) to access them, or use a DataWriterListener
(Section 6.3.3) to listen for changes in their values. Each status has an associated data
structure and is described in more detail in the following sections.
❏ DATA_WRITER_CACHE_STATUS (Section 6.3.5.1)
❏ DATA_WRITER_PROTOCOL_STATUS (Section 6.3.5.2)
❏ LIVELINESS_LOST Status (Section 6.3.5.3)
❏ OFFERED_DEADLINE_MISSED Status (Section 6.3.5.4)
❏ OFFERED_INCOMPATIBLE_QOS Status (Section 6.3.5.5)
❏ PUBLICATION_MATCHED Status (Section 6.3.5.6)
❏ RELIABLE_WRITER_CACHE_CHANGED Status (DDS Extension) (Section
6.3.5.7)
❏ RELIABLE_READER_ACTIVITY_CHANGED Status (DDS Extension) (Section
6.3.5.8)
6.3.5.1 DATA_WRITER_CACHE_STATUS
This status keeps track of the number of samples in the DataWriter’s queue.
This status does not have an associated Listener. You can access this status by calling the
DataWriter’s get_datawriter_cache_status() operation, which will return the status
structure described in Table 6.6.
Table 6.6 DDS_DataWriterCacheStatus
Type Field Name Description
DDS_Long sample_count_peak
Highest number of samples in the
DataWriter’s queue
over the lifetime of the DataWriter.
DDS_Long sample_count Current number of samples in the
DataWriter’s queue.

Chapter 6
6-30
6.3.5.2 DATA_WRITER_PROTOCOL_STATUS
This status includes internal protocol related metrics (such as the number of samples
pushed, pulled, filtered) and the status of wire-protocol traffic.
❏ Pulled samples are samples sent for repairs (that is, samples that had to be
resent), for late joiners, and all samples sent by the local DataWriter when
push_on_write (in DATA_WRITER_PROTOCOL QosPolicy (DDS Extension)
(Section 6.5.2)) is DDS_BOOLEAN_FALSE.
❏ Pushed samples are samples sent on write() when push_on_write is
DDS_BOOLEAN_TRUE.
❏ Filtered samples are samples that are not sent due to DataWriter filtering (time-
based filtering and ContentFilteredTopics).
This status does not have an associated Listener. You can access this status by calling the
following operations on the DataWriter (all of which return the status structure
described in Table 6.7 on page 6-31):
❏ get_datawriter_protocol_status() returns the sum of the protocol status for all
the matched subscriptions for the DataWriter.
❏ get_matched_subscription_datawriter_protocol_status() returns the protocol
status of a particular matched subscription, identified by a subscription_handle .
❏ get_matched_subscription_datawriter_protocol_status_by_locator() returns
the protocol status of a particular matched subscription, identified by a locator.
(See Locator Format (Section 12.2.1.1).)
Note: Status for a remote entity is only kept while the entity is alive. Once a remote
entity is no longer alive, its status is deleted. If you try to get the matched subscription
status for a remote entity that is no longer alive, the ‘get status’ call will return an error.

6.3 DataWriters
6-31
6. Sending Data
Table 6.7 DDS_DataWriterProtocolStatus
Type Field Name Description
DDS_LongLong
pushed_sample_count
The number of user samples pushed
on write from a local DataWriter to a
matching remote DataReader.
pushed_sample_count_change
The incremental change in the num-
ber of user samples pushed on write
from a local DataWriter to a match-
ing remote DataReader since the last
time the status was read.
pushed_sample_bytes
The number of bytes of user samples
pushed on write from a local
DataWriter to a matching remote
DataReader.
pushed_sample_bytes_change
The incremental change in the num-
ber of bytes of user samples pushed
on write from a local DataWriter to a
matching remote DataReader since
the last time the status was read.
DDS_LongLong
filtered_sample_count
The number of user samples pre-
emptively filtered by a local
DataWriter due to Content-Filtered
Topics.
filtered_sample_count_change
The incremental change in the num-
ber of user samples preemptively fil-
tered by a local DataWriter due to
ContentFilteredTopics since the last
time the status was read.
filtered_sample_bytes
The number of user samples pre-
emptively filtered by a local
DataWriter due to ContentFiltered-
Topics.
filtered_sample_bytes_change
The incremental change in the num-
ber of user samples preemptively fil-
tered by a local DataWriter due to
ContentFilteredTopics since the last
time the status was read.
Chapter 6
6-32
DDS_LongLong
sent_heartbeat_count
The number of Heartbeats sent
between a local DataWriter and
matching remote DataReaders.
sent_heartbeat_count_change
The incremental change in the num-
ber of Heartbeats sent between a
local DataWriter and matching
remote DataReaders since the last
time the status was read.
sent_heartbeat_bytes
The number of bytes of Heartbeats
sent between a local DataWriter and
matching remote DataReader.
sent_heartbeat_bytes_change
The incremental change in the num-
ber of bytes of Heartbeats sent
between a local DataWriter and
matching remote DataReaders since
the last time the status was read.
DDS_LongLong
pulled_sample_count
The number of user samples pulled
from local DataWriter by matching
DataReaders.
pulled_sample_count_change
The incremental change in the num-
ber of user samples pulled from
local DataWriter by matching
DataReaders since the last time the
status was read.
pulled_sample_bytes
The number of bytes of user samples
pulled from local DataWriter by
matching DataReaders.
pulled_sample_bytes_change
The incremental change in the num-
ber of bytes of user samples pulled
from local DataWriter by matching
DataReaders since the last time the
status was read.
Table 6.7 DDS_DataWriterProtocolStatus
Type Field Name Description

6.3 DataWriters
6-33
6. Sending Data
DDS_LongLong
received_ack_count
The number of ACKs from a remote
DataReader received by a local
DataWriter.
received_ack_count_change
The incremental change in the num-
ber of ACKs from a remote
DataReader received by a local
DataWriter since the last time the
status was read.
received_ack_bytes
The number of bytes of ACKs from a
remote DataReader received by a
local DataWriter.
received_ack_bytes_change
The incremental change in the num-
ber of bytes of ACKs from a remote
DataReader received by a local
DataWriter since the last time the
status was read.
DDS_LongLong
received_nack_count
The number of NACKs from a
remote DataReader received by a
local DataWriter.
received_nack_count_change
The incremental change in the num-
ber of NACKs from a remote
DataReader received by a local
DataWriter since the last time the
status was read.
received_nack_bytes
The number of bytes of NACKs
from a remote DataReader received
by a local DataWriter.
received_nack_bytes_change
The incremental change in the num-
ber of bytes of NACKs from a
remote DataReader received by a
local DataWriter since the last time
the status was read.
Table 6.7 DDS_DataWriterProtocolStatus
Type Field Name Description

Chapter 6
6-34
DDS_LongLong
sent_gap_count
The number of GAPs sent from local
DataWriter to matching remote
DataReaders.
sent_gap_count_change
The incremental change in the num-
ber of GAPs sent from local
DataWriter to matching remote
DataReaders since the last time the
status was read.
sent_gap_bytes
The number of bytes of GAPs sent
from local DataWriter to matching
remote DataReaders.
sent_gap_bytes_change
The incremental change in the num-
ber of bytes of GAPs sent from local
DataWriter to matching remote
DataReaders since the last time the
status was read.
DDS_LongLong
rejected_sample_count
The number of times a sample is
rejected for unanticipated reasons in
the send path.
rejected_sample_count_change
The incremental change in the num-
ber of times a sample is rejected due
to exceptions in the send path since
the last time the status was read.
DDS_Long send_window_size
Current maximum number of out-
standing samples allowed in the
DataWriter's queue.
Table 6.7 DDS_DataWriterProtocolStatus
Type Field Name Description

6.3 DataWriters
6-35
6. Sending Data
DDS_Sequence
Number_t
first_available_sample_
sequence_number
Sequence number of the first avail-
able sample in the DataWriter's reli-
ability queue.
last_available_sample_
sequence_number
Sequence number of the last avail-
able sample in the DataWriter's reli-
ability queue.
first_unacknowledged_sample_
sequence_number
Sequence number of the first unac-
knowledged sample in the
DataWriter's reliability queue.
first_available_sample_virtual_
sequence_number
Virtual sequence number of the first
available sample in the DataWriter's
reliability queue.
last_available_sample_virtual_
sequence_number
Virtual sequence number of the last
available sample in the DataWriter's
reliability queue.
first_unacknowledged_sample_virtual_
sequence_number
Virtual sequence number of the first
unacknowledged sample in the
DataWriter's reliability queue.
first_unacknowledged_sample_
subscription_handle
Instance Handle of the matching
remote DataReader for which the
DataWriter has kept the first avail-
able sample in the reliability queue.
first_unelapsed_keep_duration_
sample_sequence_number
Sequence number of the first sample
kept in the DataWriter's queue
whose keep_duration (applied
when disable_positive_acks is set)
has not yet elapsed.
Table 6.7 DDS_DataWriterProtocolStatus
Type Field Name Description

Chapter 6
6-36
6.3.5.3 LIVELINESS_LOST Status
A change to this status indicates that the DataWriter failed to signal its liveliness within
the time specified by the LIVELINESS QosPolicy (Section 6.5.11).
It is different than the RELIABLE_READER_ACTIVITY_CHANGED Status (DDS
Extension) (Section 6.3.5.8) status that provides information about the liveliness of a
DataWriter’s matched DataReaders; this status reflects the DataWriter’s own liveliness.
The structure for this status appears in Table 6.8 on page 6-36.
The DataWriterListener’s on_liveliness_lost() callback is invoked when this status
changes. You can also retrieve the value by calling the DataWriter’s
get_liveliness_lost_status() operation.
6.3.5.4 OFFERED_DEADLINE_MISSED Status
A change to this status indicates that the DataWriter failed to write data within the time
period set in its
DEADLINE QosPolicy (Section 6.5.4).
The structure for this status appears in Table 6.9.
The DataWriterListener’s on_offered_deadline_missed() operation is invoked when this
status changes. You can also retrieve the value by calling the DataWriter’s
get_deadline_missed_status() operation.
Table 6.8 DDS_LivelinessLostStatus
Type Field Name Description
DDS_Long total_count
Cumulative number of times the DataWriter failed to explic-
itly signal its liveliness within the liveliness period.
DDS_Long total_count_change
The change in total_count since the last time the Listener
was called or the status was read.
Table 6.9 DDS_OfferedDeadlineMissedStatus
Type Field Name Description
DDS_Long total_count
Cumulative number of times the DataWriter failed to
write within its offered deadline.
DDS_Long total_count_change
The change in total_count since the last time the Lis-
tener was called or the status was read.
DDS_Instance
Handle_t
last_instance_handle
Handle to the last data-instance in the DataWriter for
which an offered deadline was missed.

6.3 DataWriters
6-37
6. Sending Data
6.3.5.5 OFFERED_INCOMPATIBLE_QOS Status
A change to this status indicates that the DataWriter discovered a DataReader for the
same Topic, but that DataReader had requested QoS settings incompatible with this
DataWriter’s offered QoS.
The structure for this status appears in Table 6.10.
The DataWriterListener’s on_offered_incompatible_qos() callback is invoked when this
status changes. You can also retrieve the value by calling the DataWriter’s
get_offered_incompatible_qos_status() operation.
6.3.5.6 PUBLICATION_MATCHED Status
A change to this status indicates that the DataWriter discovered a matching DataReader.
A ‘match’ occurs only if the DataReader and DataWriter have the same Topic, same data
type (implied by having the same To pi c), and compatible QosPolicies. In addition, if user
code has directed RTI Data Distribution Service to ignore certain DataReaders, then those
DataReaders will never be matched. See Section 14.4.2 for more on setting up a Domain-
Participant to ignore specific DataReaders.
The structure for this status appears in Table 6.11.
Table 6.10 DDS_OfferedIncompatibleQoSStatus
Type Field Name Description
DDS_Long total_count
Cumulative number of times the DataWriter discov-
ered a DataReader for the same Topic with a
requested QoS that is incompatible with that offered
by the DataWriter.
DDS_Long total_count_change
The change in total_count since the last time the Lis-
tener was called or the status was read.
DDS_QosPolicyId_t last_policy_id
The ID of the QosPolicy that was found to be incom-
patible the last time an incompatibility was detected.
(Note: if there are multiple incompatible policies,
only one of them is reported here.)
DDS_
QosPolicyCountSeq
policies
A list containing—for each policy—the total number
of times that the DataWriter discovered a DataReader
for the same Topic with a requested QoS that is
incompatible with that offered by the DataWriter.

Chapter 6
6-38
The DataWriterListener’s on_publication_matched() callback is invoked when this sta-
tus changes. You can also retrieve the value by calling the DataWriter’s
get_publication_match_status() operation.
6.3.5.7 RELIABLE_WRITER_CACHE_CHANGED Status (DDS Extension)
A change to this status indicates that the number of unacknowledged samples in a reli-
able DataWriter's cache has reached one of these trigger points:
❏ The cache is empty (contains no unacknowledged samples)
❏ The cache is full (the number of unacknowledged samples has reached the value
specified in DDS_ResourceLimitsQosPolicy::max_samples)
❏ The number of unacknowledged samples has reached a high or low watermark.
See the high_watermark and low_watermark fields in Table 6.29 of the
DATA_WRITER_PROTOCOL QosPolicy (DDS Extension) (Section 6.5.2).
For more about the reliable protocol used by RTI Data Distribution Service and specifi-
cally, what it means for a sample to be ‘unacknowledged,’ see Chapter 10: Reliable Com-
munications.
The structure for this status appears in Table 6.12. The supporting structure,
DDS_ReliableWriterCacheEventCount, is described in Table 6.13.
The DataWriterListener’s on_reliable_writer_cache_changed() callback is invoked when
this status changes. You can also retrieve the value by calling the DataWriter’s
get_reliable_writer_cache_changed_status() operation.
Table 6.11 DDS_PublicationMatchedStatus
Type Field Name Description
DDS_Long
total_count
Cumulative number of times the DataWriter discov-
ered a "match" with a DataReader.
total_count_change
The change in total_count since the last time the Lis-
tener was called or the status was read.
current_count
The number of DataReaders currently matched to the
DataWriter.
current_count_peak
The highest value that current_count has reached
until now.
current_count_change
The change in current_count since the last time the
listener was called or the status was read.
DDS_Instance
Handle_t
last_subscription_handle
Handle to the last DataReader that matched the
DataWriter causing the status to change.

6.3 DataWriters
6-39
6. Sending Data
6.3.5.8 RELIABLE_READER_ACTIVITY_CHANGED Status (DDS Extension)
This status indicates that one or more reliable DataReaders has become active or inactive.
This status is the reciprocal status to the LIVELINESS_CHANGED Status (Section
7.3.6.4) on the DataReader. It is different than LIVELINESS_LOST Status (Section 6.3.5.3)
status on the DataWriter, in that the latter informs the DataWriter about its own liveliness;
this status informs the DataWriter about the liveliness of its matched DataReaders.
A reliable DataReader is considered active by a reliable DataWriter with which it is
matched if that DataReader acknowledges the samples that it has been sent in a timely
fashion. For the definition of "timely" in this context, see DATA_WRITER_PROTOCOL
QosPolicy (DDS Extension) (Section 6.5.2).
Table 6.12 DDS_ReliableWriterCacheChangedStatus
Type Field Name Description
DDS_ReliableWriter
CacheEventCount
empty_reliable_writer
_cache
How many times the reliable DataWriter's cache
of unacknowledged samples has become
empty.
full_reliable_writer
_cache
How many times the reliable DataWriter's cache
of unacknowledged samples has become full.
low_watermark
_reliable_writer_cache
How many times the reliable DataWriter's cache
of unacknowledged samples has fallen to the
low watermark.
high_watermark
_reliable_writer_cache
How many times the reliable DataWriter's cache
of unacknowledged samples has risen to the
high watermark.
DDS_Long
unacknowledged_
sample_count
The current number of unacknowledged sam-
ples in the DataWriter's cache.
unacknowledged_
sample_count_peak
The highest value that
unacknowledged_sample_count has reached
until now.
Table 6.13 DDS_ReliableWriterCacheEventCount
Type Field Name Description
DDS_Long total_count The total number of times the event has occurred.
DDS_Long total_count_change
The number of times the event has occurred since the Lis-
tener was last invoked or the status read.

Chapter 6
6-40
This status is only used for DataWriters whose RELIABILITY QosPolicy (Section 6.5.17)
is set to RELIABLE. For best-effort DataWriters, all counts in this status will remain at
zero.
The structure for this status appears in Table 6.14.
The DataWriterListener’s on_reliable_reader_activity_changed() callback is invoked
when this status changes. You can also retrieve the value by calling the DataWriter’s
get_reliable_reader_activity_changed_status() operation.
6.3.6 Using a Type-Specific DataWriter (FooDataWriter)
Recall that a Topic is bound to a data type that specifies the format of the data associated
with the Topic. Data types are either defined dynamically or in code generated from def-
initions in IDL or XML; see Chapter 3: Data Types and Data Samples. For each of your
application's generated data types, such as 'Foo', there will be a FooDataWriter class (or
a set of functions in C). This class allows the application to use a type-safe interface to
interact with samples of type 'Foo'. You will use the FooDataWriter's write() operation
used to send data. For dynamically defined data-types, you will use the Dynamic-
DataWriter class.
In fact, you will use the FooDataWriter any time you need to perform type-specific oper-
ations, such as registering or writing instances. Table 6.3 indicates which operations
must be called using FooDataWriter. For operations that are not type-specific, you can
can call the operation using either a FooDataWriter or a DDSDataWriter object
1
.
Table 6.14 DDS_ReliableReaderActivityChangedStatus
Type Field Name Description
DDS_Long
active_count
The current number of reliable readers currently
matched with this reliable DataWriter.
not_active_count
The number of reliable readers that have been
dropped by this reliable DataWriter because they failed
to send acknowledgements in a timely fashion.
active_count_change
The change in the number of active reliable DataRead-
ers since the Listener was last invoked or the status
read.
inactive_count_change
The change in the number of inactive reliable
DataReaders since the Listener was last invoked or the
status read.
DDS_Instance
Handle_t
last_instance_handle
The instance handle of the last reliable DataReader to
be determined to be inactive.

6.3 DataWriters
6-41
6. Sending Data
You may notice that the Publisher’s create_datawriter() operation returns a pointer to an
object of type DDSDataWriter; this is because the create_datawriter() method is used to
create DataWriters of any data type. However, when executed, the function actually
returns a specialization (an object of a derived class) of the DataWriter that is specific for
the data type of the associated Topic. For a Top ic of type ‘Foo’, the object actually
returned by create_datawriter() is a FooDataWriter.
To safely cast a generic DDSDataWriter pointer to a FooDataWriter pointer, you should
use the static narrow() method of the FooDataWriter class. The narrow() method will
return NULL if the generic DDSDataWriter pointer is not pointing at an object that is
really a FooDataWriter.
For instance, if you create a Topic bound to the type ‘Alarm’, all DataWriters created for
that Topic will be of type ‘AlarmDataWriter.’ To access the type-specific methods of
AlarmDataWriter, you must cast the generic DDSDataWriter pointer returned by
create_datawriter(). For example:
DDSDataWriter* writer = publisher->create_datawriter(topic,
writer_qos,
NULL, NULL);
AlarmDataWriter *alarm_writer = AlarmDataWriter::narrow(writer);
if (alarm_writer == NULL) {
// ... error
};
In the C API, there is also a way to do the opposite of narrow().
FooDataWriter_as_datawriter() casts a FooDataWriter as a DDSDataWriter, and
FooDataReader_as_datareader() casts a FooDataReader as a DDSDataReader.
6.3.7 Writing Data
The write() operation informs RTI Data Distribution Service that there is a new value for a
data-instance to be published for the corresponding To pi c. By default, calling write() will
send the data immediately over the network (assuming that there are matched
DataReaders). However, you can configure and execute operations on the DataWriter’s
Publisher to buffer the data so that it is sent in a batch with data from other DataWriters
1. In the C API, the non type-specific operations must be called using a DDS_DataWriter pointer.

Chapter 6
6-42
or even to prevent the data from being sent. Those sending “modes” are configured
using the PRESENTATION QosPolicy (Section 6.4.6). The actual transport-level commu-
nications may be done by a separate, lower-priority thread when the Publisher is config-
ured to send the data for its DataWriters. For more information on threads, see
Chapter 17: RTI Data Distribution Service Threading Model.
When you call write(), RTI Data Distribution Service automatically attaches a stamp of
the current time that is sent with the data sample to the DataReader(s). The timestamp
appears in the source_timestamp field of the DDS_SampleInfo structure that is pro-
vided along with your data using DataReaders (see The SampleInfo Structure (Section
7.4.5)).
DDS_ReturnCode_t write (const Foo &instance_data,
const DDS_InstanceHandle_t &handle)
You can use an alternate DataWriter operation called write_w_timestamp(). This per-
forms the same action as write(), but allows the application to explicitly set the
source_timestamp. This is useful when you want the user application to set the value of
the timestamp instead of the default clock used by RTI Data Distribution Service.
DDS_ReturnCode_t write_w_timestamp (const Foo &instance_data,
const DDS_InstanceHandle_t &handle,
const DDS_Time_t &source_timestamp)
Note that, in general, the application should not mix these two ways of specifying time-
stamps. That is, for each DataWriter, the application should either always use the auto-
matic timestamping mechanism (by calling the normal operations) or always specify a
timestamp (by calling the “w_timestamp” variants of the operations). Mixing the two
methods may result in not receiving sent data.
The write() operation also asserts liveliness on the DataWriter, the associated Publisher,
and the associated DomainParticipant. It has the same effect with regards to liveliness as
an explicit call to assert_liveliness(), see Section 6.3.14 and the LIVELINESS QosPolicy
(Section 6.5.11). Maintaining liveliness is important for DataReaders to know that the
DataWriter still exists and for the proper behavior of the OWNERSHIP QosPolicy (Sec-
tion 6.5.13).
See also: Clock Selection (Section 8.6).
6.3.7.1 Blocking During a write()
The write() operation may block if the RELIABILITY QosPolicy (Section 6.5.17) kind is
set to Reliable and the modification would cause data to be lost or cause one of the lim-
its specified in the RESOURCE_LIMITS QosPolicy (Section 6.5.18) to be exceeded. Spe-

6.3 DataWriters
6-43
6. Sending Data
cifically, write() may block in the following situations (note that the list may not be
exhaustive), even if its HISTORY QosPolicy (Section 6.5.8) is KEEP_LAST:
❏ If max_samples < (max_instances * depth), then in the situation where the
max_samples resource limit is exhausted, RTI Data Distribution Service may dis-
card samples of some other instance, as long as at least one sample remains for
such an instance. If it is still not possible to make space available to store the
modification, the writer is allowed to block.
❏ If max_samples < max_instances, then the DataWriter may block regardless of
the depth field in the HISTORY QosPolicy (Section 6.5.8).
This operation may also block when using BEST_EFFORT Reliability (Section 6.5.18)
and ASYNCHRONOUS Publish Mode (Section 6.5.16) QoS settings. In this case, the
DataWriter will queue samples until they are sent by the asynchronous publishing
thread. The number of samples that can be stored is determined by the HISTORY
QosPolicy (Section 6.5.8). If the asynchronous thread does not send samples fast enough
(such as when using a slow FlowController (Section 6.6)), the queue may fill up. In that
case, subsequent write calls will block.
If this operation does block for any of the above reasons, the RELIABILITY
max_blocking_time configures the maximum time the write operation may block
(waiting for space to become available). If max_blocking_time elapses before the
DataWriter can store the modification without exceeding the limits, the operation will
fail and return RETCODE_TIMEOUT.
6.3.8 Flushing Batches of Data Samples
The flush() operation makes a batch of data samples available to be sent on the network.
DDS_ReturnCode_t flush ()
If the DataWriter’s PUBLISH_MODE QosPolicy (DDS Extension) (Section 6.5.16) kind is
not ASYNCHRONOUS, the batch will be sent on the network immediately in the con-
text of the calling thread.
If the DataWriter’s PublishModeQosPolicy kind is ASYNCHRONOUS, the batch will be
sent in the context of the asynchronous publishing thread.
The flush() operation may block based on the conditions described in Blocking During a
write() (Section 6.3.7.1).
If this operation does block, the max_blocking_time in the RELIABILITY QosPolicy
(Section 6.5.17) configures the maximum time the write operation may block (waiting
for space to become available). If max_blocking_time elapses before the DataWriter is

Chapter 6
6-44
able to store the modification without exceeding the limits, the operation will fail and
return TIMEOUT.
For more information on batching, see the BATCH QosPolicy (DDS Extension) (Section
6.5.1).
6.3.9 Writing Coherent Sets of Data Samples
A publishing application can request that a set of data-sample changes be propagated in
such a way that they are interpreted at the receivers' side as a cohesive set of modifica-
tions. In this case, the receiver will only be able to access the data after all the modifica-
tions in the set are available at the subscribing end.
This is useful in cases where the values are inter-related. For example, suppose you have
two data-instances representing the ‘altitude’ and ‘velocity vector’ of the same aircraft.
If both are changed, it may be important to ensure that reader see both together (other-
wise, it may erroneously interpret that the aircraft is on a collision course).
To use this mechanism:
1. Call the Publisher’s begin_coherent_changes() operation to indicate the start a
coherent set.
2. For each sample in the coherent set: call the FooDataWriter’s write() operation.
3. Call the Publisher’s end_coherent_changes() operation to terminate the set.
Calls to begin_coherent_changes() and end_coherent_changes() can be nested.
See also: the coherent_access field in the PRESENTATION QosPolicy (Section 6.4.6).
6.3.10 Waiting for Acknowledgments
The DataWriter’s wait_for_acknowledgments() operation blocks the calling thread until
either all data written by the reliable DataWriter is acknowledged by all matched reliable
DataReaders, or else the duration specified by the max_wait parameter elapses, which-
ever happens first.
DDS_ReturnCode_t wait_for_acknowledgments
(const DDS_Duration_t & max_wait)
This operation returns DDS_RETCODE_OK if all the samples were acknowledged, or
DDS_RETCODE_TIMEOUT if the max_wait duration expired first.
If the DataWriter does not have its RELIABILITY QosPolicy (Section 6.5.17) kind set to
RELIABLE, the operation will immediately return DDS_RETCODE_OK.

6.3 DataWriters
6-45
6. Sending Data
There is a similar operation available at the Publisher level, see Section 6.2.7.
The reliability protocol used by RTI Data Distribution Service is discussed in Chapter 10:
Reliable Communications.
6.3.11 Managing Data Instances (Working with Keyed Data Types)
This section applies only to data types that use keys, see Samples, Instances, and Keys
(Section 2.2.2). Using the following operations for non-keyed types has no effect.
Topi cs come in two flavors: those whose associated data type has specified some fields as
defining the ‘key,’ and those whose associated data type has not. An example of a data-
type that specifies key fields is shown in Figure 6.10.
Figure 6.10 Data Type with a Key
typedef struct Flight {
long flightId; //@key
string departureAirport;
string arrivalAirport;
Time_t departureTime;
Time_t estimatedArrivalTime;
Location_t currentPosition;
};
If the data type has some fields that act as a ‘key,’ the Topic essentially defines a collec-
tion of data-instances whose values can be independently maintained. In Figure 6.10,
the flightId is the ‘key’. Different flights will have different values for the key. Each
flight is an instance of the Topic. Each write() will update the information about a single
flight. DataReaders can be informed when new flights appear or old ones disappear.
Since the key fields are contained within the data structure, RTI Data Distribution Service
could examine the key fields each time it needs to determine which data-instance is
being modified. However, for performance and semantic reasons, it is better for your
application to declare all the data-instances it intends to modify—prior to actually writ-
ing any samples. This is known as registration, described below in Section 6.3.11.1.
The register_instance() operation provides a handle to the instance (of type
DDS_InstanceHandle_t) that can be used later to refer to the instance.
6.3.11.1 Registering and Unregistering Instances
If your data type has a key, you may improve performance by registering an instance
(data associated with a particular value of the key) before you write data for the
instance. You can do this for any number of instances up the maximum number of

Chapter 6
6-46
instances configured in the DataWriter’s RESOURCE_LIMITS QosPolicy (Section
6.5.18). Instance registration is completely optional.
Registration tells RTI Data Distribution Service that you are about to modify (write or dis-
pose of) a specific instance. This allows RTI Data Distribution Service to pre-configure
itself to process that particular instance, which can improve performance.
If you write without registering, you can pass the NIL instance handle as part of the
write() call.
If you register the instance first, RTI Data Distribution Service can look up the instance
beforehand and return a handle to that instance. Then when you pass this handle to the
write() operation, RTI Data Distribution Service no longer needs to analyze the data to
check what instance it is for. Instead, it can directly update the instance pointed to by
the instance handle.
In summary, by registering an instance, all subsequent write() calls to that instance
become more efficient. If you only plan to write once to a particular instance, registra-
tion does not ‘buy’ you much in performance, but in general, it is good practice.
To register an instance, use the DataWriter’s register_instance() operation. For best per-
formance, it should be invoked prior to calling any operation that modifies the instance,
such as write(), write_w_timestamp(), dispose(), or dispose_w_timestamp().
When you are done using that instance, you can unregister it. To unregister an instance,
use the DataWriter’s unregister_instance() operation. Unregistering tells RTI Data Dis-
tribution Service that the DataWriter does not intend to modify that data-instance any-
more, allowing RTI Data Distribution Service to recover any resources it allocated for the
instance. It does not delete the instance; that is done with the dispose_instance() opera-
tion, see Section 6.3.11.2. unregister_instance() should only be used on instances that
have been previously registered. The use of these operations is illustrated in Figure 6.11.
Once an instance has been unregistered, and assuming that no other DataWriters are
writing values for the instance, the matched DataReader’s will eventually get an indica-
tion that the instance no longer has any DataWriters. This is communicated to the
DataReaders by means of the DDS_SampleInfo that accompanies each data-sample (see
Section 7.4.5). Once there are no DataWriters for the instance, the DataReader will see the
value of DDS_InstanceStateKind for that instance to be NOT_ALIVE_NO_WRITERS.
The unregister_instance()
operation may affect the ownership of the data instance (see
the OWNERSHIP QosPolicy (Section 6.5.13)). If the DataWriter was the exclusive owner
of the instance, then calling unregister_instance() relinquishes that ownership, and
another DataWriter can become the exclusive owner of the instance.
The unregister_instance() operation indicates only that a particular DataWriter no lon-
ger has anything to say about the instance.

6.3 DataWriters
6-47
6. Sending Data
Note that this is different than the dispose() operation discussed in the next section,
which informs DataReaders that the data-instance is no longer “alive.” The state of an
instance is stored in the DDS_SampleInfo structure that accompanies each sample of
data that is received by a DataReader. User code can access the instance state to see if an
instance is “alive”—meaning there is at least one DataWriter that is publishing samples
for the instance, see Instance States (Section 7.4.5.4).
6.3.11.2 Disposing of Data
The dispose() operation informs DataReaders that, as far as the DataWriter knows, the
data-instance no longer exists and can be considered “not alive.” When the dispose()
operation is called, the instance state stored in the DDS_SampleInfo structure, accessed
Flight myFlight;
// writer is a previously-created FlightDataWriter
myFlight.flightId = 265;
DDS_InstanceHandle_t fl265Handle =
writer->register_instance(myFlight);
...
// Each time we update the flight, we can pass the handle
myFlight.departureAirport = “SJC”;
myFlight.arrivalAirport = “LAX”;
myFlight.departureTime = {120000, 0};
myFlight.estimatedArrivalTime = {130200, 0};
myFlight.currentPosition = { {37, 20}, {121, 53} };
if (writer->write(myFlight, fl265Handle) != DDS_RETCODE_OK) {
// ... handle error
}
...
// Once we are done updating the flight, it can be unregistered
if (writer->unregister_instance(myFlight, fl265Handle) !=
DDS_RETCODE_OK) {
// ... handle error
}
Figure 6.11 Registering an Instance

Chapter 6
6-48
through DataReaders, will change to NOT_ALIVE_DISPOSED for that particular
instance.
For example, in a flight tracking system, when a flight lands, a DataWriter may dispose
the data-instance corresponding to the flight. In that case, all DataReaders who are moni-
toring the flight will see the instance state change to NOT_ALIVE_DISPOSED, indicat-
ing that the flight has landed.
Note that this is different than unregister_instance() (Section 6.3.11.1), which indicates
only that a particular DataWriter no longer wishes to modify an instance—an important
distinction if there are multiple writers on the same instance.
If a particular instance is never disposed, its instance state will eventually change from
ALIVE to NOT_ALIVE_NO_WRITERS once all the DataWriters that were writing that
instance unregister the instance or lose their liveliness. For more information on
DataWriter liveliness, see the LIVELINESS QosPolicy (Section 6.5.11).
See also: Propagating Serialized Keys with Disposed-Instance Notifications (Section
6.5.2.5).
6.3.11.3 Looking Up an Instance Handle
Some operations, such as write(), require an instance_handle parameter. If you need to
get such as handle, you can call the FooDataWriter’s lookup_instance() operation, which
takes an instance as a parameter and returns a handle to that instance. This is useful for
keyed data types.
DDS_InstanceHandle_t lookup_instance (const Foo & key_holder)
The instance must have already been registered (see Section 6.3.11.1). If the instance is
not registered, this operation returns DDS_HANDLE_NIL.
6.3.11.4 Getting the Key Value for an Instance
Once you have an instance handle (using register_instance() or lookup_instance()),
you can use the DataWriter’s get_key_value() operation to retrieve the value of the key
of the corresponding instance. The key fields of the data structure passed into
get_key_value() will be filled out with the original values used to generate the instance
handle. The key fields are defined when the data type is defined, see Samples, Instances,
and Keys (Section 2.2.2) for more information.
Following our example in Figure 6.11 on page 6-47, register_instance() returns a
DDS_InstanceHandle_t (fl265Handle) that can be used in the call to the Flight-
DataWriter’s get_key_value() operation. The value of the key is returned in a structure
of type Flight with the flightId field filled in with the integer 265.

6.3 DataWriters
6-49
6. Sending Data
See also: Propagating Serialized Keys with Disposed-Instance Notifications (Section
6.5.2.5).
6.3.12 Setting DataWriter QosPolicies
The DataWriter’s QosPolicies control its resources and behavior.
The DDS_DataWriterQos structure has the following format:
DDS_DataWriterQos struct {
DDS_DurabilityQosPolicy durability;
DDS_DurabilityServiceQosPolicy durability_service;
DDS_DeadlineQosPolicy deadline;
DDS_LatencyBudgetQosPolicy latency_budget;
DDS_LivelinessQosPolicy liveliness;
DDS_ReliabilityQosPolicy reliability;
DDS_DestinationOrderQosPolicy destination_order;
DDS_HistoryQosPolicy history;
DDS_ResourceLimitsQosPolicy resource_limits;
DDS_TransportPriorityQosPolicy transport_priority;
DDS_LifespanQosPolicy lifespan;
DDS_UserDataQosPolicy user_data;
DDS_OwnershipQosPolicy ownership;
DDS_OwnershipStrengthQosPolicy ownership_strength;
DDS_WriterDataLifecycleQosPolicy writer_data_lifecycle;
// extensions to the DDS standard:
DDS_DataWriterResourceLimitsQosPolicy writer_resource_limits;
DDS_DataWriterProtocolQosPolicy protocol;
DDS_TransportSelectionQosPolicy transport_selection;
DDS_TransportUnicastQosPolicy unicast;
DDS_TypeSupportQosPolicy type_support;
DDS_PublishModeQosPolicy publish_mode;
DDS_PropertyQosPolicy property;
DDS_BatchQosPolicy batch;
DDS_MultiChannelQosPolicy multi_channel;
} DDS_DataWriterQos;
Note:
set_qos() cannot always be used within a listener callback, see Restricted Opera-
tions in Listener Callbacks (Section 4.5.1).
Table 6.15 summarizes the meaning of each policy. (They appear alphabetically in the
table.) For information on why you would want to change a particular QosPolicy, see the
referenced section. For defaults and valid ranges, please refer to the online documenta-
tion.

Chapter 6
6-50
Table 6.15 DataWriter QosPolicies
QosPolicy Description
Batch
Specifies and configures the mechanism that allows RTI Data Distribution Ser-
vice to collect multiple user data samples to be sent in a single network packet,
to take advantage of the efficiency of sending larger packets and thus increase
effective throughput. See Section 6.5.1.
DataWriterProtocol
This QosPolicy configures the DDS on-the-network protocol, RTPS. See
Section 6.5.2.
DataWriterResourceLimits
Controls how many threads can concurrently block on a write() call of this
DataWriter. See Section 6.5.3.
Deadline
For a DataReader, specifies the maximum expected elapsed time between arriv-
ing data samples.
For a DataWriter, specifies a commitment to publish samples with no greater
elapsed time between them.
See Section 6.5.4.
DestinationOrder
Controls how RTI Data Distribution Service will deal with data sent by multiple
DataWriters for the same topic. Can be set to "by reception timestamp" or to "by
source timestamp". See Section 6.5.5.
Durability
Specifies whether or not RTI Data Distribution Service will store and deliver
data that were previously published to new DataReaders. See Section 6.5.6.
DurabilityService
Various settings to configure the external Persistence Service used by RTI Data
Distribution Service for DataWriters with a Durability QoS setting of Persistent
Durability. See Section 6.5.7.
History
Specifies how much data must to stored by RTI Data Distribution Servicefor the
DataWriter or DataReader. This QosPolicy affects the RELIABILITY QosPolicy
(Section 6.5.17) as well as the DURABILITY QosPolicy (Section 6.5.6). See
Section 6.5.8.
LatencyBudget
Suggestion to DDS on how much time is allowed to deliver data. See
Section 6.5.9.
Lifespan
Specifies how long RTI Data Distribution Service should consider data sent by
an user application to be valid. See Section 6.5.10.
Liveliness
Specifies and configures the mechanism that allows DataReaders to detect
when DataWriters become disconnected or "dead." See Section 6.5.11.
MultiChannel
Configures a DataWriter’s ability to send data on different multicast groups
(addresses) based on the value of the data. See Section 6.5.12.
Ownership
Along with OwnershipStrength, specifies if DataReaders for a topic can receive
data from multiple DataWriters at the same time. See Section 6.5.13.
OwnershipStrength
Used to arbitrate among multiple DataWriters of the same instance of a Topic
when Ownership QosPolicy is EXLUSIVE. See Section 6.5.14.

6.3 DataWriters
6-51
6. Sending Data
Many of the DataWriter QosPolicies also apply to DataReaders (see Section 7.3). For a
DataWriter to communicate with a DataReader, their QosPolicies must be compatible.
Generally, for the QosPolicies that apply both to the DataWriter and the DataReader, the
setting in the DataWriter is considered an “offer” and the setting in the DataReader is a
“request.” Compatibility means that what is offered by the DataWriter equals or sur-
passes what is requested by the DataReader. Each policy’s description includes compati-
bility restrictions. For more information on compatibility, see QoS Requested vs. Offered
Compatibility—the RxO Property (Section 4.2.1).
Partition
Adds string identifiers that are used for matching DataReaders and DataWriters
for the same Top ic . See Section 6.4.5.
Property
Stores name/value (string) pairs that can be used to configure certain parame-
ters of RTI Data Distribution Service that are not exposed through formal QoS
policies. It can also be used to store and propagate application-specific name/
value pairs, which can be retrieved by user code during discovery. See
Section 6.5.15.
PublishMode
Specifies how RTI Data Distribution Service sends application data on the net-
work. By default, data is sent in the user thread that calls the DataWriter’s
write() operation. However, this QosPolicy can be used to tell RTI Data Distri-
bution Service to use its own thread to send the data. See Section 6.5.16.
Reliability
Specifies whether or not DDS will deliver data reliably. See Section 6.5.17.
ResourceLimits
Controls the amount of physical memory allocated for DDS entities, if
dynamic allocations are allowed, and how they occur. Also controls memory
usage among different instance values for keyed topics. See Section 6.5.18.
TransportPriority
Set by a DataWriter to tell DDS that the data being sent is a different "priority"
than other data. See Section 6.5.19.
TransportSelection
Allows you to select which physical transports a DataWriter or DataReader may
use to send or receive its data. See Section 6.5.20.
TransportUnicast
Specifies a subset of transports and port number that can be used by an Entity
to receive data. See Section 6.5.21.
TypeSupport
Used to attach application-specific value(s) to a DataWriter or DataReader.
These values are passed to the serialization or deserialization routine of the
associated data type. See Section 6.5.22.
UserData
Along with Topic Data QosPolicy and Group Data QosPolicy, used to attach a
buffer of bytes to RTI Data Distribution Service's discovery meta-data. See
Section 6.5.23.
WriterDataLifeCycle
Controls how a DataWriter handles the lifecycle of the instances (keys) that the
DataWriter is registered to manage. See Section 6.5.24.
Table 6.15 DataWriter QosPolicies
QosPolicy Description

Chapter 6
6-52
Some of the policies may be changed after the DataWriter has been created. This allows
the application to modify the behavior of the DataWriter while it is in use. To modify the
QoS of an already-created DataWriter, use the get_qos() and set_qos() operations on the
DataWriter. This is a general pattern for all DDS Entities, described in Section 4.1.7.3.
6.3.12.1 Configuring QoS Settings when the DataWriter is Created
As described in Creating DataWriters (Section 6.3.1), there are different ways to create a
DataWriter, depending on how you want to specify its QoS (with or without a QoS Pro-
file).
❏ In Figure 6.9 on page 6-25, we saw an example of how to create a DataWriter with
default QosPolicies by using the special constant,
DDS_DATAWRITER_QOS_DEFAULT, which indicates that the default QoS
values for a DataWriter should be used. The default DataWriter QoS values are
configured in the Publisher or DomainParticipant; you can change them with
set_default_datawriter_qos() or set_default_datawriter_qos_with_profile().
Then any DataWriters created with the Publisher will use the new default values.
As described in Section 4.1.7, this is a general pattern that applies to the con-
struction of all DDS Entities.
❏ To create a DataWriter with non-default QoS without using a QoS Profile, see the
example code in Figure 6.12 on page 6-53. It uses the Publisher’s
get_default_writer_qos() method to initialize a DDS_DataWriterQos structure.
Then, the policies are modified from their default values before the structure is
used in the create_datawriter() method.
❏ You can also create a DataWriter and specify its QoS settings via a QoS Profile. To
do so, you will call create_datawriter_with_profile(), as seen in Figure 6.13 on
page 6-53.
❏ If you want to use a QoS profile, but then make some changes to the QoS before
creating the DataWriter, call get_datawriter_qos_from_profile() and
create_datawriter() as seen in Figure 6.14 on page 6-54.
For more information, see Creating DataWriters (Section 6.3.1) and Chapter 15: Config-
uring QoS with XML.

6.3 DataWriters
6-53
6. Sending Data
Figure 6.12 Creating a DataWriter with Modified QosPolicies (not from a profile)
DDS_DataWriterQos writer_qos;
1
// initialize writer_qos with default values
publisher->get_default_datawriter_qos(writer_qos);
// make QoS changes
writer_qos.history.depth = 5;
// Create the writer with modified qos
DDSDataWriter * writer = publisher->create_datawriter(
topic,
writer_qos,
NULL, DDS_STATUS_MASK_NONE);
if (writer == NULL) {
// ... error
}
// narrow it for your specific data type
FooDataWriter* foo_writer = FooDataWriter::narrow(writer);
1. Note: In C, you must initialize the QoS structures before they are used, see Section 4.2.2.
// Create the datawriter
DDSDataWriter * writer =
publisher->create_datawriter_with_profile(
topic,
“MyWriterLibrary”,
“MyWriterProfile”,
NULL, DDS_STATUS_MASK_NONE);
if (writer == NULL) {
// ... error
};
// narrow it for your specific data type
FooDataWriter* foo_writer = FooDataWriter::narrow(writer);
Figure 6.13 Creating a DataWriter with a QoS Profile

Chapter 6
6-54
DDS_DataWriterQos writer_qos;
1
// Get writer QoS from profile
retcode = factory->get_datawriter_qos_from_profile(
writer_qos,
“WriterProfileLibrary”,
“WriterProfile”);
if (retcode != DDS_RETCODE_OK) {
// handle error
}
// Makes QoS changes
writer_qos.history.depth = 5;
DDSDataWriter * writer = publisher->create_datawriter(
topic,
writer_qos,
NULL, DDS_STATUS_MASK_NONE);
if (participant == NULL) {
// handle error
}
1. Note: In C, you must initialize the QoS structures before they are used, see Section 4.2.2.
Figure 6.14
Getting QoS Values from a Profile, Changing QoS Values, Creating a DataWriter with
Modified QoS Values

6.3 DataWriters
6-55
6. Sending Data
6.3.12.2 Changing QoS Settings After the DataWriter Has Been Created
There are 2 ways to change an existing DataWriter’s QoS after it is has been created—
again depending on whether or not you are using a QoS Profile.
❏ To change QoS programmatically (that is, without using a QoS Profile), use
get_qos() and set_qos(). See the example code in Figure 6.15. It retrieves the cur-
rent values by calling the DataWriter’s get_qos() operation. Then it modifies the
value and calls set_qos() to apply the new value. Note, however, that some
QosPolicies cannot be changed after the DataWriter has been enabled—this
restriction is noted in the descriptions of the individual QosPolicies.
❏ You can also change a DataWriter’s (and all other Entities’) QoS by using a QoS
Profile and calling set_qos_with_profile(). For an example, see Figure 6.16. For
more information, see Chapter 15: Configuring QoS with XML.
DDS_DataWriterQos writer_qos;
1
// Get current QoS.
if (datawriter->get_qos(writer_qos) != DDS_RETCODE_OK) {
// handle error
}
// Makes QoS changes here
writer_qos.history.depth = 5;
// Set the new QoS
if (datawriter->set_qos(writer_qos) != DDS_RETCODE_OK ) {
// handle error
}
1. For the C API, you need to use DDS_ParticipantQos_INITIALIZER or DDS_ParticipantQos_initialize().
See Special QosPolicy Handling Considerations for C (Section 4.2.2)
Figure 6.15
Changing the QoS of an Existing DataWriter (without a QoS Profile)
retcode = writer->set_qos_with_profile(
“WriterProfileLibrary”,”WriterProfile”);
if (retcode != DDS_RETCODE_OK) {
// handle error
}
Figure 6.16 Changing the QoS of an Existing DataWriter with a QoS Profile

Chapter 6
6-56
6.3.12.3 Using a Topic’s QoS to Initialize a DataWriter’s QoS
Several DataWriter QosPolicies can also be found in the QosPolicies for To pi cs (see
Section 5.1.3). The QosPolicies set in the Topic do not directly affect the DataWriters (or
DataReaders) that use that Topic. In many ways, some QosPolicies are a Topic-level con-
cept, even though the DDS standard allows you to set different values for those policies
for different DataWriters and DataReaders of the same Topic. Thus, the policies in the
DDS_TopicQos structure exist as a way to help centralize and annotate the intended or
suggested values of those QosPolicies. RTI Data Distribution Service does not check to see
if the actual policies set for a DataWriter is aligned with those set in the To pi c to which it
is bound.
There are many ways to use the QosPolicies’ values set in the Topic when setting the
QosPolicies’ values in a DataWriter. The most straightforward way is to get the values of
policies directly from the Top ic and use them in the policies for the DataWriter, as shown
in Figure 6.17.
Figure 6.17 Copying Selected QoS from a Topic when Creating a DataWriter
DDS_DataWriterQos writer_qos;
1
DDS_TopicQos topic_qos;
// topic and publisher already created
// get current QoS for the topic, default QoS for the writer
if (topic->get_qos(topic_qos) != DDS_RETCODE_OK) {
// handle error
}
if (publisher->get_default_datawriter_qos(writer_qos) !=
DDS_RETCODE_OK) {
// handle error
}
// Copy specific policies from the topic QoS to the writer QoS
writer_qos.deadline = topic_qos.deadline;
writer_qos.reliability = topic_qos.reliability;
// Create the DataWriter with the modified QoS
DDSDataWriter* writer = publisher->create_datawriter(topic,
writer_qos,
NULL, DDS_STATUS_MASK_NONE);
1. Note in C, you must initialize the QoS structures before they are used, see Section 4.2.2.

6.3 DataWriters
6-57
6. Sending Data
You can use the Publisher’s copy_from_topic_qos() operation to copy all of the common
policies from the Top ic QoS to a DataWriter QoS. This is illustrated in Figure 6.18.
In another design pattern, you may want to start with the default QoS values for a
DataWriter and override them with the QoS values of the Top ic . Figure 6.19 gives an
example of how to do this.
Because this is a common pattern, RTI Data Distribution Service provides a special macro,
DDS_DATAWRITER_QOS_USE_TOPIC_QOS, that can be used to indicate that the
DataWriter should be created with the set of QoS values that results from modifying the
default DataWriter QosPolicies with the QoS values specified by the Topic. Figure 6.20
shows how the macro is used.
Figure 6.18 Copying all QoS from a Topic when Creating a DataWriter
DDS_DataWriterQos writer_qos;
1
DDS_TopicQos topic_qos;
// topic, publisher, writer_listener already created
if (topic->get_qos(topic_qos) != DDS_RETCODE_OK) {
// handle error
}
if (publisher->get_default_datawriter_qos(writer_qos) !=
DDS_RETCODE_OK) {
// handle error
}
// copy relevant QosPolicies from topic’s qos into writer’s qos
publisher->copy_from_topic_qos(writer_qos, topic_qos);
// Optionally, modify policies as desired
writer_qos.deadline.duration.sec = 1;
writer_qos.deadline.duration.nanosec = 0;
// Create the DataWriter with the modified QoS
DDSDataWriter* writer = publisher->create_datawriter(topic,
writer_qos, writer_listener,
DDS_STATUS_MASK_ALL);
1. Note in C, you must initialize the QoS structures before they are used, see Section 4.2.2.

Chapter 6
6-58
The code fragments shown in Figure 6.19 and Figure 6.20 result in identical QoS settings
for the created DataWriter.
For more information on the general use and manipulation of QosPolicies, see
Section 4.1.7.
Figure 6.19 Combining Default Topic and DataWriter QoS (Option 1)
DDS_DataWriterQos writer_qos;
1
DDS_TopicQos topic_qos;
// topic, publisher, writer_listener already created
if (topic->get_qos(topic_qos) != DDS_RETCODE_OK) {
// handle error
}
if (publisher->get_default_datawriter_qos(writer_qos) !=
DDS_RETCODE_OK) {
// handle error
}
if (publisher->copy_from_topic_qos(writer_qos, topic_qos) !=
DDS_RETCODE_OK) {
// handle error
}
// Create the DataWriter with the combined QoS
DDSDataWriter* writer =
publisher->create_datawriter(topic, writer_qos,
writer_listener,
DDS_STATUS_MASK_ALL);
1. Note in C, you must initialize the QoS structures before they are used, see Section 4.2.2.
Figure 6.20 Combining Default Topic and DataWriter QoS (Option 2)
// topic, publisher, writer_listener already created
DDSDataWriter* writer = publisher->create_datawriter (topic,
DDS_DATAWRITER_QOS_USE_TOPIC_QOS,
writer_listener, DDS_STATUS_MASK_ALL);

6.3 DataWriters
6-59
6. Sending Data
6.3.13 Navigating Relationships Among Entities
6.3.13.1 Finding Matching Subscriptions
The following DataWriter operations can be used to get information on the DataReaders
that are currently associated with the DataWriter (that is, the DataReaders to which RTI
Data Distribution Service will send the data written by the DataWriter).
❏ get_matched_subscriptions()
❏ get_matched_subscription_data()
❏ get_matched_subscription_locators()
get_matched_subscriptions() will return a sequence of handles to matched DataReaders.
You can use these handles in the get_matched_subscription_data() method to get infor-
mation about the DataReader such as the values of its QosPolicies.
get_matched_subscription_locators() retrieves a list of locators for subscriptions cur-
rently "associated" with the DataWriter. Matched subscription locators include locators
for all those subscriptions in the same domain that have a matching Topic, compatible
QoS, and a common partition that the DomainParticipant has not indicated should be
"ignored." These are the locators that RTI Data Distribution Service uses to communicate
with matching DataReaders. (See Locator Format (Section 12.2.1.1).)
You can also get the DATA_WRITER_PROTOCOL_STATUS for matching subscriptions
with these operations (see Section 6.3.5.2):
❏ get_matched_subscription_datawriter_protocol_status()
❏ get_matched_subscription_datawriter_protocol_status_by_locator()
Notes:
❏ Status/data for a matched subscription is only kept while the matched subscrip-
tion is alive. Once a matched subscription is no longer alive, its status is deleted.
If you try to get the status/data for a matched subscription that is no longer
alive, the 'get status' or ' get data' call will return an error.
❏ DataReaders that have been ignored using the DomainParticipant’s
ignore_subscription() operation are not considered to be matched even if the
DataReader has the same Topic and compatible QosPolicies. Thus, they will not be
included in the list of DataReaders returned by get_matched_subscriptions() or
get_matched_subscription_locators(). See Section 14.4.2 for more on
ignore_subscription().
Chapter 6
6-60
❏ The get_matched_subscription_data() operation does not retrieve the following
information from builtin-topic data structures: type_code, property, and
content_filter_property. This information is available through the
on_data_available() callback (if a DataReaderListener is installed on the Sub-
scriptionBuiltinTopicDataDataReader).
6.3.13.2 Finding Related Entities
These operations are useful for obtaining a handle to various related entities:
❏ get_publisher()
❏ get_topic()
get_publisher() returns the Publisher that created the DataWriter. get_topic() returns the
Topic with which the DataWriter is associated.
6.3.14 Asserting Liveliness
The assert_liveliness() operation can be used to manually assert the liveliness of the
DataWriter without writing data. This operation is only useful if the kind of LIVELI-
NESS QosPolicy (Section 6.5.11) is MANUAL_BY_PARTICIPANT or
MANUAL_BY_TOPIC.
How DataReaders determine if DataWriters are alive is configured using the LIVELINESS
QosPolicy (Section 6.5.11). The lease_duration parameter of the LIVELINESS QosPolicy
is a contract by the DataWriter to all of its matched DataReaders that it will send a packet
within the time value of the lease_duration to state that it is still alive.
There are three ways to assert liveliness. One is to have RTI Data Distribution Service
itself send liveliness packets periodically when the kind of LIVELINESS QosPolicy is set
to AUTOMATIC. The other two ways to assert liveliness, used when liveliness is set to
MANUAL, are to call write() to send data or to call the assert_liveliness() operation
without sending data.
6.4 Publisher/Subscriber QosPolicies
This section provides detailed information on the QosPolicies associated with a Pub-
lisher. Note that Subscribers have the exact same set of policies. Table 6.2 on page 6-10
provides a quick reference. They are presented here in alphabetical order.

6.4 Publisher/Subscriber QosPolicies
6-61
6. Sending Data
❏ ASYNCHRONOUS_PUBLISHER QosPolicy (DDS Extension) (Section 6.4.1)
❏ ENTITYFACTORY QosPolicy (Section 6.4.2)
❏ EXCLUSIVE_AREA QosPolicy (DDS Extension) (Section 6.4.3)
❏ GROUP_DATA QosPolicy (Section 6.4.4)
❏ PARTITION QosPolicy (Section 6.4.5)
❏ PRESENTATION QosPolicy (Section 6.4.6)
6.4.1 ASYNCHRONOUS_PUBLISHER QosPolicy (DDS Extension)
This QosPolicy is used to enable or disable asynchronous publishing and asynchronous
batch flushing for the Publisher.
This QosPolicy can be used to reduce amount of time spent in the user thread to send
data. You can use it to send large data reliably. Large in this context means that the data
that cannot be sent as a single packet by a transport. For example, to send data larger
than 63K reliably using UDP/IP, one must configure DDS to send the data using asyn-
chronous Publishers.
If so configured, the Publisher will spawn two threads, one for asynchronous publishing
and one for asynchronous batch flushing. The asynchronous publisher thread will be
shared by all DataWriters (belonging to this Publisher) that have their PUBLISH_MODE
QosPolicy (DDS Extension) (Section 6.5.16) kind set to ASYNCHRONOUS. The asyn-
chronous publishing thread will then handle the data transmission chores for those
DataWriters. This thread will only be spawned when the first of these DataWriters is
enabled.
The asynchronous batch flushing thread will be shared by all DataWriters (belonging to
this Publisher) that have batching enabled and max_flush_delay different than
DURATION_INFINITE in BATCH QosPolicy (DDS Extension) (Section 6.5.1). This
thread will only be spawned when the first of these DataWriters is enabled.
This QosPolicy allows you to adjust the asynchronous publishing and asynchronous
batch flushing threads independently.
Batching and asynchronous publication are independent of one another. Flushing a
batch on an asynchronous DataWriter makes it available for sending to the DataWriter's
Flow Controllers (DDS Extension) (Section 6.6). From the point of view of the FlowCon-
troller, a batch is treated like one large sample.
RTI Data Distribution Service will sometimes coalesce multiple samples into a single net-
work datagram. For example, samples buffered by a FlowController or sent in response
to a negative acknowledgement (NACK) may be coalesced. This behavior is distinct

Chapter 6
6-62
from sample batching. Data samples sent by different asynchronous DataWriters belong-
ing to the same Publisher to the same destination will not be coalesced into a single net-
work packet. Instead, two separate network packets will be sent. Only samples written
by the same DataWriter and intended for the same destination will be coalesced.
This QoS includes the members in Table 6.16.
6.4.1.1 Properties
This QosPolicy cannot be modified after the Publisher is created.
Since it is only for Publishers, there are no compatibility restrictions for how it is set on
the publishing and subscribing sides.
6.4.1.2 Related QosPolicies
❏ If disable_asynchronous_write is TRUE (not the default), then any DataWriters
created from this Publisher must have their PUBLISH_MODE QosPolicy (DDS
Extension) (Section 6.5.16) kind set to SYNCHRONOUS. (Otherwise
create_datawriter() will return INCONSISTENT_QOS.)
❏ If disable_asynchronous_batch is TRUE (not the default), then any DataWriters
created from this Publisher must have max_flush_delay in BATCH QosPolicy
(DDS Extension) (Section 6.5.1) set to DURATION_INFINITE. (Otherwise
create_datawriter() will return INCONSISTENT_QOS.)
Table 6.16 DDS_AsynchronousPublisherQosPolicy
Type Field Name Description
DDS_Boolean disable_asynchronous_write
Disables asynchronous publishing.
To
write asynchronously, this field
must be FALSE (the default).
DDS_ThreadSettings_t thread
Settings for the publishing thread.
These settings are OS-dependent.
DDS_Boolean disable_asynchronous_batch
Disables asynchronous batch flushing.
To flush asynchronously, this field
must be FALSE (the default).
DDS_ThreadSettings_t asynchronous_batch_thread
Settings for the asynchronous batch
flushing thread.
These settings are OS-dependent.

6.4 Publisher/Subscriber QosPolicies
6-63
6. Sending Data
❏ DataWriters configured to use the MULTI_CHANNEL QosPolicy (DDS Exten-
sion) (Section 6.5.12) do not support asynchronous publishing; an error is
returned if a multi-channel DataWriter is configured for asynchronous publish-
ing.
6.4.1.3 Applicable Entities
❏ Publishers (Section 6.2)
6.4.1.4 System Resource Considerations
Two threads can potentially be created.
For asynchronous publishing, system resource usage depends on the activity of the
asynchronous thread controlled by the FlowController (see Flow Controllers (DDS
Extension) (Section 6.6)).
For asynchronous batch flushing, system resource usage depends on the activity of the
asynchronous thread controlled by max_flush_delay in BATCH QosPolicy (DDS Exten-
sion) (Section 6.5.1).
6.4.2 ENTITYFACTORY QosPolicy
This QosPolicy controls whether or not child entities are created in the enabled state.
This QosPolicy applies to the DomainParticipantFactory, DomainParticipants, Publishers,
and Subscribers, which act as ‘factories’ for the creation of subordinate entities. A
DomainParticipantFactory is used to create DomainParticipants. A DomainParticipant is
used to create both Publishers and Subscribers. A Publisher is used to create DataWriters,
similarly a Subscriber is used to create DataReaders.
Entities can be created either in an ‘enabled’ or ‘disabled’ state. An enabled entity can
actively participate in communication. A disabled entity cannot be discovered or take
part in communication until it is explicitly enabled. For example, RTI Data Distribution
Service will not send data if the write() operation is called on a disabled DataWriter, nor
will RTI Data Distribution Service deliver data to a disabled DataReader. You can only
enable a disabled entity. Once an entity is enabled, you cannot disable it, see
Section 4.1.2 about the enable() method.
The ENTITYFACTORY contains only one member, as illustrated in Table 6.17.
The ENTITYFACTORY QosPolicy controls whether the entities created from the factory
are automatically enabled upon creation or are left disabled. For example, if a Publisher

Chapter 6
6-64
is configured to auto-enable created entities, then all DataWriters created from that Pub-
lisher will be automatically enabled.
Note: if an entity is disabled, then all of the child entities it creates are also created in a
disabled state, regardless of the setting of this QosPolicy. However, enabling a disabled
entity will enable all of its children if this QosPolicy is set to autoenable child entities.
Note: an entity can only be enabled; it cannot be disabled after its been enabled.
See Section 6.4.2.1 for an example of how to set this policy.
There are various reasons why you may want to create entities in the disabled state:
❏ To get around a “chicken and egg”-type issue. Where you need to have an entity
in order to modify it, but you don’t want the entity to be used by RTI Data Distri-
bution Service until it has been modified.
For example, if you create a DomainParticipant in the enabled state, it will imme-
diately start sending packets to other nodes trying to discover if other RTI Data
Distribution Service applications exist. However, you may want to configure the
builtin topic reader listener before discovery occurs. To do this, you need to cre-
ate a DomainParticipant in the disabled state because once enabled, discovery will
occur. If you set up the builtin topic reader listener after the DomainParticipant is
enabled, you may miss some discovery traffic.
❏ You may want to create entities without having them automatically start to
work. This especially pertains to DataReaders. If you create a DataReader in an
enabled state and you are using DataReaderListeners, RTI Data Distribution Service
will immediately search for matching DataWriters and callback the listener as
soon as data is published. This may not be what you want to happen if your
application is still in the middle of initialization when data arrives.
So typically, you would create all entities in a disabled state, and then when all
parts of the application have been initialized, one would enable all entities at the
same time using the enable() operation on the DomainParticipant, see
Section 4.1.2.
Table 6.17 DDS_EntityFactoryQosPolicy
Type Field Name Description
DDS_Boolean autoenable_created_entities
DDS_BOOLEAN_TRUE: enable entities when
they are created
DDS_BOOLEAN_FALSE: do not enable entities
when they are created

6.4 Publisher/Subscriber QosPolicies
6-65
6. Sending Data
❏ An entity’s existence is not advertised to other participants in the network until
the entity is enabled. Instead of sending an individual declaration packet to
other applications announcing the existence of the entity, RTI Data Distribution
Service can be more efficient in bundling multiple declarations into a single
packet when you enable all entities at the same time.
See Section 4.1.2 for more information about enabled/disabled entities.
6.4.2.1 Example
The code in Figure 6.21 illustrates how to use the ENTITYFACTORY QoS.
Figure 6.21 Configuring a Publisher so that New DataWriters are Disabled
DDS_PublisherQos publisher_qos;
1
// topic, publisher, writer_listener already created
if (publisher->get_qos(publisher_qos) != DDS_RETCODE_OK) {
// handle error
}
publisher_qos.entity_factory.autoenable_created_entities =
DDS_BOOLEAN_FALSE;
if (publisher->set_qos(publisher_qos) != DDS_RETCODE_OK) {
// handle error
}
// Subsequently created DataWriters are created disabled and
// must be explicitly enabled by the user-code
DDSDataWriter* writer = publisher->create_datawriter(topic,
DDS_DATAWRITER_QOS_DEFAULT,
writer_listener, DDS_STATUS_MASK_ALL);
... // now do other initialization
// Now explicitly enable the DataWriter, this will allow other
// applications to discover the DataWriter and for this application
// to send data when the DataWriter’s write() method is called
writer->enable();
1. Note in C, you must initialize the QoS structures before they are used, see Section 4.2.2.

Chapter 6
6-66
6.4.2.2 Properties
This QosPolicy can be modified at any time.
It can be set differently on the publishing and subscribing sides.
6.4.2.3 Related QosPolicies
This QosPolicy does not interact with any other policies.
6.4.2.4 Applicable Entities
❏ DomainParticipantFactory (Section 8.2)
❏ DomainParticipants (Section 8.3)
❏ Publishers (Section 6.2)
❏ Subscribers (Section 7.2)
6.4.2.5 System Resource Considerations
This QosPolicy does not significantly impact the use of system resources.
6.4.3 EXCLUSIVE_AREA QosPolicy (DDS Extension)
This QosPolicy controls the creation and use of Exclusive Areas. An exclusive area (EA)
is a mutex with built-in deadlock protection when multiple EAs are in use. It is used to
provide mutual exclusion among different threads of execution. Multiple EAs allow
greater concurrency among the internal and user threads when executing RTI Data Dis-
tribution Service code.
EAs allow RTI Data Distribution Service to be multi-threaded while preventing threads
from a classical deadlock scenario for multi-threaded applications. EAs prevent a
DomainParticipant's internal threads from deadlocking with each other when executing
internal code as well as when executing the code of user-registered listener callbacks.
Within an EA, all calls to the code protected by the EA are single threaded. Each
DomainParticipant, Publisher and Subscriber represents a separate EA. All DataWriters of
the same Publisher and all DataReaders of the same Subscriber share the EA of its parent.
This means that the DataWriters of the same Publisher and the DataReaders of the same
Subscriber are inherently single threaded.
Within an EA, there are limitations on how code protected by a different EA can be
accessed. For example, when data is being processed by user code received in the
DataReaderListener of a Subscriber EA, the user code may call the write() function of a

6.4 Publisher/Subscriber QosPolicies
6-67
6. Sending Data
DataWriter that is protected by the EA of its Publisher. So you can send data in the func-
tion called to process received data. However, you cannot create entities or call func-
tions that are protected by the EA of the DomainParticipant. See Exclusive Areas (EAs)
(Section 4.5) for the complete documentation on Exclusive Areas.
With this QoS, you can force a Publisher or Subscriber to share the same EA as its Domain-
Participant. Using this capability, the restriction of not being to create entities in a
DataReaderListener's on_data_available() callback is lifted. However, the trade-off is
that the application has reduced concurrency through the Entities that share an EA.
Note that the restrictions on calling methods in a different EA only exists for user code
that is called in registered Listeners by internal DomainParticipant threads. User code
may call all RTI Data Distribution Service functions for any Entities from their own
threads at any time.
The EXCLUSIVE_AREA includes a single member, as listed in Table 6.18. For the
default value, please refer to the online documentation.
The implications and restrictions of using a private or shared EA are discussed in
Section 4.5. The basic trade-off is concurrency versus restrictions on which methods can
be called in user, listener, callback functions. To summarize:
Behavior when the Publisher or Subscriber’s use_shared_exclusive_area is set to FALSE:
❏ The creation of the Publisher/Subscriber will create an EA that will be used only by
the Publisher/Subscriber and the DataWriters/DataReaders that belong to them.
❏ Consequences: This setting maximizes concurrency at the expense of creating a
mutex for the Publisher or Subscriber. In addition, using a separate EA may
restrict certain RTI Data Distribution Service operations (see Operations Allowed
within Listener Callbacks (Section 4.4.5)) from being called from the callbacks of
Listeners attached to those entities and the entities that they create. This limita-
tion results from a built-in deadlock protection mechanism.
Table 6.18 DDS_ExclusiveAreaQosPolicy
Type Field Name Description
DDS_Boolean use_shared_exclusive_area
DDS_BOOLEAN_FALSE:
subordinates will not use the same EA
DDS_BOOLEAN_TRUE:
subordinates will use the same EA

Chapter 6
6-68
Behavior when the Publisher or Subscriber’s use_shared_exclusive_area is set to TRUE:
❏ The creation of the Publisher/Subscriber does not create a new EA. Instead, the
Publisher/Subscriber, along with the DataWriters/DataReaders that they create, will
use a common EA shared with the DomainParticipant.
❏ Consequences: By sharing the same EA among multiple entities, you may
decrease the amount of concurrency in the application, which can adversely
impact performance. However, this setting does use less resources and allows
you to call almost any operation on any Entity within a listener callback (see
Exclusive Areas (EAs) (Section 4.5) for full details).
6.4.3.1 Example
The code in Figure 6.22 illustrates how to change the EXCLUSIVE_AREA policy.
6.4.3.2 Properties
This QosPolicy cannot be modified after the Entity has been created.
It can be set differently on the publishing and subscribing sides.
6.4.3.3 Related QosPolicies
This QosPolicy does not interact with any other policies.
Figure 6.22 Creating a Publisher with a Shared Exclusive Area
DDS_PublisherQos publisher_qos;
1
// domain, publisher_listener have been previously created
if (participant->get_default_publisher_qos(publisher_qos) !=
DDS_RETCODE_OK) {
// handle error
}
publisher_qos.exclusive_area.use_shared_exclusive_area =
DDS_BOOLEAN_TRUE;
DDSPublisher* publisher =
participant->create_publisher(publisher_qos,
publisher_listener, DDS_STATUS_MASK_ALL);
1. Note in C, you must initialize the QoS structures before they are used, see Section 4.2.2.

6.4 Publisher/Subscriber QosPolicies
6-69
6. Sending Data
6.4.3.4 Applicable Entities
❏ Publishers (Section 6.2)
❏ Subscribers (Section 7.2)
6.4.3.5 System Resource Considerations
This QosPolicy affects the use of operating-system mutexes. When
use_shared_exclusive_area is FALSE, the creation of a Publisher or Subscriber will create
an operating-system mutex.
6.4.4 GROUP_DATA QosPolicy
This QosPolicy provides an area where your application can store additional informa-
tion related to the Publisher and Subscriber. This information is passed between applica-
tions during discovery (see Chapter 12: Discovery) using builtin-topics (see Chapter 14:
Built-In Topics). How this information is used will be up to user code. RTI Data Distribu-
tion Service does not do anything with the information stored as GROUP_DATA except
to pass it to other applications.
Use cases are often application-to-application identification, authentication, authoriza-
tion, and encryption purposes. For example, applications can use this QosPolicy to send
security certificates to each other for RSA-type security.
The value of the GROUP_DATA QosPolicy is sent to remote applications when they are
first discovered, as well as when the Publisher or Subscriber’s set_qos() method is called
after changing the value of the GROUP_DATA. User code can set listeners on the built-
in DataReaders of the built-in To pi cs used by RTI Data Distribution Service to propagate
discovery information. Methods in the built-in topic listeners will be called whenever
new DomainParticipants, DataReaders, and DataWriters are found. Within the user call-
back, you will have access to the GROUP_DATA that was set for the associated Publisher
or Subscriber.
Currently, GROUP_DATA of the associated Publisher or Subscriber is only propagated
with the information that declares a DataWriter or DataReader. Thus, you will need to
access the value of GROUP_DATA through DDS_PublicationBuiltinTopicData or
DDS_SubscriptionBuiltinTopicData (see Chapter 14: Built-In Topics).
The structure for the GROUP_DATA QosPolicy includes just one field, as seen in
Table 6.19. The field is a sequence of octets that translates to a contiguous buffer of bytes
whose contents and length is set by the user. The maximum size for the data are set in
the DOMAIN_PARTICIPANT_RESOURCE_LIMITS QosPolicy (DDS Extension) (Sec-
tion 8.5.4).

Chapter 6
6-70
This policy is similar to the USER_DATA QosPolicy (Section 6.5.23) and TOPIC_DATA
QosPolicy (Section 5.2.1) that apply to other types of Entities.
6.4.4.1 Example
One possible use of GROUP_DATA is to pass some credential or certificate that your
subscriber application can use to accept or reject communication with the DataWriters
that belong to the Publisher (or vice versa, where the publisher application can validate
the permission of DataReaders of a Subscriber to receive its data). The value of the
GROUP_DATA of the Publisher is propagated in the ‘group_data’ field of the
DDS_PublicationBuiltinTopicData that is sent with the declaration of each DataWriter.
Similarly, the value of the GROUP_DATA of the Subscriber is propagated in the
‘group_data’ field of the DDS_SubscriptionBuiltinTopicData that is sent with the dec-
laration of each DataReader.
When RTI Data Distribution Service discovers a DataWriter/DataReader, the application
can be notified of the discovery of the new entity and retrieve information about the
DataWriter/DataReader QoS by reading the DCPSPublication or DCPSSubscription
built-in topics (see Chapter 14: Built-In Topics). Your application can then examine the
GROUP_DATA field in the built-in Topic and decide whether or not the DataWriter/
DataReader should be allowed to communicate with local DataReaders/DataWriters. If
communication is not allowed, the application can use the DomainParticipant’s
ignore_publication() or ignore_subscription() operation to reject the newly discovered
remote entity as one with which the application allows RTI Data Distribution Service to
communicate. See Figure 14.2, “Ignoring Publications,” on page 14-17 for an example of
how to do this.
The code in Figure 6.23 illustrates how to change the GROUP_DATA policy.
6.4.4.2 Properties
This QosPolicy can be modified at any time.
It can be set differently on the publishing and subscribing sides.
Table 6.19 DDS_GroupDataQosPolicy
Type Field Name Description
DDS_OctetSeq value Empty by default

6.4 Publisher/Subscriber QosPolicies
6-71
6. Sending Data
6.4.4.3 Related QosPolicies
❏ TOPIC_DATA QosPolicy (Section 5.2.1)
❏ USER_DATA QosPolicy (Section 6.5.23)
❏ DOMAIN_PARTICIPANT_RESOURCE_LIMITS QosPolicy (DDS Extension)
(Section 8.5.4)
Figure 6.23 Creating a Publisher with GROUP_DATA
DDS_PublisherQos publisher_qos;
1
int i = 0;
// Bytes that will be used for the group data. In this case 8 bytes
// of some information that is meaningful to the user application
char myGroupData[GROUP_DATA_SIZE] =
{ 0x34, 0xaa, 0xfe, 0x31, 0x7a, 0xf2, 0x34, 0xaa};
// assume that domainparticipant and publisher_listener
// are already created
if (participant->get_default_publisher_qos(publisher_qos) !=
DDS_RETCODE_OK) {
// handle error
}
// Must set the size of the sequence first
publisher_qos.group_data.value.maximum(GROUP_DATA_SIZE);
publisher_qos.group_data.value.length(GROUP_DATA_SIZE);
for (i = 0; i < GROUP_DATA_SIZE; i++) {
publisher_qos.group_data.value[i] = myGroupData[i]
}
DDSPublisher* publisher = participant->create_publisher(
publisher_qos,
publisher_listener,
DDS_STATUS_MASK_ALL);
1. Note in C, you must initialize the QoS structures before they are used, see Section 4.2.2.

Chapter 6
6-72
6.4.4.4 Applicable Entities
❏ Publishers (Section 6.2)
❏ Subscribers (Section 7.2)
6.4.4.5 System Resource Considerations
As mentioned earlier, the maximum size of the GROUP_DATA is set in the
publisher_group_data_max_length and subscriber_group_data_max_length fields of
the DOMAIN_PARTICIPANT_RESOURCE_LIMITS QosPolicy (DDS Extension) (Sec-
tion 8.5.4). Because RTI Data Distribution Service will allocate memory based on this
value, you should only increase this value if you need to. If your system does not use
GROUP_DATA, then you can set this value to zero to save memory. Setting the value of
the GROUP_DATA QosPolicy to hold data longer than the value set in the [publisher/
subscriber]_group_data_max_length fields will result in failure and an
INCONSISTENT_QOS_POLICY return code.
However, should you decide to change the maximum size of GROUP_DATA, you must
make certain that all applications in the RTI Data Distribution Service domain have
changed the value of [publisher/subscriber]_group_data_max_length to be the same.
If two applications have different limits on the size of GROUP DATA, and one applica-
tion sets the GROUP_DATA QosPolicy to hold data that is greater than the maximum
size set by another application, then the matching DataWriters and DataReaders of the
Publisher and Subscriber between the two applications will not connect. This is also true
for the TOPIC_DATA (Section 5.2.1) and USER_DATA (Section 6.5.23) QosPolicies.
6.4.5 PARTITION QosPolicy
The PARTITION QoS provides another way to control which DataWriters will match—
and thus communicate with—which DataReaders. It can be used to prevent DataWriters
and DataReaders that would have otherwise matched with the same Top ic and compati-
ble QosPolicies from talking to each other. Much in the same way that only applications
within the same DDS domain will communicate with each other, only DataWriters and
DataReaders that belong to the same partition can talk to each other.
The PARTITION QoS applies to Publishers and Subscribers, therefore the DataWriters and
DataReaders belong to the partitions as set on the Publishers and Subscribers that created
them. The mechanism implementing the PARTITION QoS is relatively lightweight, and
membership in a partition can be dynamically changed. Unlike the creation and
destruction of DomainParticipants, there is no spawning and killing of threads or alloca-
tion and deallocation of memory when Publishers and Subscribers add or remove them-
selves from partitions.

6.4 Publisher/Subscriber QosPolicies
6-73
6. Sending Data
The PARTITION QoS consists of a set of partition names that identify the partitions of
which the Entity is a member. These names are simply strings, and DataWriters and
DataReaders are considered to be in the same partition if they have more than one parti-
tion name in common in the PARTITION QoS set on their Publishers or Subscribers.
Conceptually each partition name can be thought of as defining a “visibility plane”
within the DDS domain. DataWriters will make their data available on all the visibility
planes that correspond to its Publisher’s partition names, and the DataReaders will see the
data that is placed on any of the visibility planes that correspond to its Subscriber’s parti-
tion names.
Figure 6.24 illustrates the concept of PARTITION QoS. In this figure, all DataWriters and
DataReaders belong to the same domain and refer to the same Top ic . DataWriter1 is con-
figured to belong to three partitions: partition_A, partition_B, and partition_C.
DataWriter2 belongs to partition_C and partition_D.
Similarly, DataReader1 is configured to belong to partition_A and partition_B, and
DataReader2 belongs only to partition_C. Given this topology, the data written by
DataWriter1 is visible in partitions A, B, and C. The oval tagged with the number “1”
represents one data-sample written by DataWriter1.
Similarly, the data written by DataWriter2 is visible in partitions C and D. The oval
tagged with the number “2” represents one data-sample written by DataWriter2.
Figure 6.24 Controlling Visibility of Data with the PARTITION QoS
partition_A
DataWriter1
DataReader1
1
Makes its data
available on all the
specified visibility
planes
Observes data
written only on the
specified visibility
planes
partition_B
partition_C
partition_D
1
1
DataWriter2
DataReader2
2
2

Chapter 6
6-74
The result is that the data written by DataWriter1 will be received by both DataReader1
and DataReader2, but the data written by DataWriter2 will only be visible by
DataReader2.
Publishers and Subscribers always belong to a partition. By default, Publishers and Sub-
scribers belong to a single partition whose name is the empty string, ““. If you set the
PARTITION QoS to be an empty set, RTI Data Distribution Service will assign the Pub-
lisher or Subscriber to the default partition, ““. Thus, for the example above, without
using the PARTITION QoS, DataReaders 1 and 2 would have received all data samples
written by DataWriters 1 and 2.
6.4.5.1 Rules for PARTITION Matching
On the Publisher side, the PARTITION QosPolicy associates a set of strings (partition
names) with the Publisher. On the Subscriber side, the application also uses the PARTI-
TION QoS to associate partition names with the Subscriber.
Taking into account the PARTITION QoS, a DataWriter will communicate with a
DataReader if and only if the following conditions apply:
1. The DataWriter and DataReader belong to the same domain. That is, their respec-
tive DomainParticipants are bound to the same domain ID (see Section 8.3.1).
2. The DataWriter and DataReader have matching To pi cs . That is, each is associated
with a Topic with the same topic_name and data type.
3. The QoS offered by the DataWriter is compatible with the QoS requested by the
DataReader.
4. The application has not used the ignore_participant(), ignore_datareader(), or
ignore_datawriter() APIs to prevent the association (see Section 14.4).
5. The Publisher to which the DataWriter belongs and the Subscriber to which the
DataReader belongs must have at least one matching partition name.
The last condition reflects the visibility of the data introduced by the PARTITION QoS.
Matching partition names is done by string comparison, thus partition names are case
sensitive.
NOTE: Failure to match partitions is not considered an incompatible QoS and does not
trigger any listeners or change any status conditions.
6.4.5.2 Pattern Matching for PARTITION Names
You may also add strings that are regular expressions
1
to the PARTITION QosPolicy. A
regular expression does not define a set of partitions to which the Publisher or Subscriber
6.4 Publisher/Subscriber QosPolicies
6-75
6. Sending Data
belongs, as much as it is used in the partition matching process to see if a remote entity
has a partition name that would be matched with the regular expression. That is, the
regular expressions in the PARTITION QoS of a Publisher are never matched against
those found in the PARTITION QoS of a Subscriber. Regular expressions are always
matched against “concrete” partition names. Thus, a concrete partition name may not
contain any reserved characters that are used to define regular expressions, for example
‘*’, ‘.’, ‘+’, etc.
If a PARTITION QoS only contains regular expressions, then the Publisher or Subscriber
will be assigned automatically to the default partition with the empty string name (““).
Thus, do not be fooled into thinking that a PARTITION QoS that only contains the string
“*” matches another PARTITION QoS that only contains the string “*”. Yes, the Pub-
lisher will match the Subscriber, but it is because they both belong to the default ““ parti-
tion.
DataWriters and DataReaders are considered to have a partition in common if the sets of
partitions that their associated Publishers and Subscribers have defined have:
❏ at least one concrete partition name in common
❏ a regular expression in one Entity that matches a concrete partition name in
another Entity
The programmatic representation of the PARTITION QoS is shown in Table 6.20. The
QosPolicy contains the single string sequence, name. Each element in the sequence can
be a concrete name or a regular expression. The Entity will be assigned to the default ““
partition if the sequence is empty.
You can have one long partition string of 256 chars, or multiple shorter strings that add
up to 256 or less characters. For example, you can have one string of 4 chars and one
string of 252 chars.
1. As defined by the POSIX fnmatch API (1003.2-1992 section B.6).
Table 6.20
DDS_PartitionQosPolicy
Type Field Name Description
DDS_StringSeq name
Empty by default.
There can be up to 64 names, with a maximum of 256 char-
acters summed across all names.

Chapter 6
6-76
6.4.5.3 Example
Since the set of partitions for a Publisher or Subscriber can be dynamically changed, the
Partition QosPolicy is useful to control which DataWriters can send data to which
DataReaders and vice versa—even if all of the DataWriters and DataReaders are for the
same topic. This facility is useful for creating temporary separation groups among enti-
ties that would otherwise be connected to and exchange data each other.
The code in Figure 6.25 illustrates how to change the PARTITION policy.
The ability to dynamically control which DataWriters are matched to which DataReaders
(of the same Topic) offered by the PARTITION QoS can be used in many different ways.
Using partitions, connectivity can be controlled based on location-based partitioning,
access-control groups, purpose, or a combination of these and other application-defined
criteria. We will examine some of these options via concrete examples.
Example of location-based partitions. Assume you have a set of Topi cs in a traffic man-
agement system such as “TrafficAlert,” “AccidentReport,” and “CongestionStatus.” You
may want to control the visibility of these To pi cs based on the actual location to which
the information applies. You can do this by placing the Publisher in a partition that rep-
resents the area to which the information applies. This can be done using a string that
Figure 6.25 Setting Partition Names on a Publisher
DDS_PublisherQos publisher_qos;
1
// domain, publisher_listener have been previously created
if (participant->get_default_publisher_qos(publisher_qos) !=
DDS_RETCODE_OK) {
// handle error
}
// Set the partition QoS
publisher_qos.partition.name.maximum(3);
publisher_qos.partition.name.length(3);
publisher_qos.partition.name[0] = DDS_String_dup(“partition_A”);
publisher_qos.partition.name[1] = DDS_String_dup(“partition_B”);
publisher_qos.partition.name[2] = DDS_String_dup(“partition_C”);
DDSPublisher* publisher =
participant->create_publisher(publisher_qos,
publisher_listener, DDS_STATUS_MASK_ALL);
1. Note in C, you must initialize the QoS structures before they are used, see Section 4.2.2.

6.4 Publisher/Subscriber QosPolicies
6-77
6. Sending Data
includes the city, state, and country, such as “USA/California/Santa Clara.” A Sub-
scriber can then choose whether it wants to see the alerts in a single city, the accidents in
a set of states, or the congestion status across the US. Some concrete examples are shown
in Table 6.21.
Example of access-control group partitions. Suppose you have an application where
access to the information must be restricted based on reader membership to access-con-
trol groups. You can map this group-controlled visibility to partitions by naming all the
groups (e.g. executives, payroll, financial, general-staff, consultants, external-people)
and assigning the Publisher to the set of partitions that represents which groups should
have access to the information. The Subscribers specify the groups to which they belong,
and the partition-matching behavior will ensure that the information is only distributed
to Subscribers belonging to the appropriate groups. Some concrete examples are shown
in Table 6.22.
A slight variation of this pattern could be used to confine the information based on
security levels.
Table 6.21 Example of Using Location-Based Partitions
Publisher Partitions Subscriber Partitions Result
Specify a single partition
name using the pattern:
“<country>/<state>/
<city>”
Specify multiple partition
names, one per region of inter-
est
Limits the visibility of the data to
Subscribers that express interest in
the geographical region.
“USA/California/Santa
Clara”
(Subscriber participant is irrele-
vant here.)
Send only information for Santa
Clara, California.
(Publisher partition is
irrelevant here.)
“USA/California/Santa Clara”
Receive only information for Santa
Clara, California.
“USA/California/Santa Clara”
“USA/California/Sunnyvale”
Receive information for Santa Clara
or Sunnyvale, California.
“USA/California/*”
“USA/Nevada/*”
Receive information for California
or Nevada.
“USA/California/*”
“USA/Nevada/Reno”
“USA/Nevada/Las Vegas”
Receive information for California
and two cities in Nevada.
Chapter 6
6-78
Example of purpose-based partitions: Assume an application containing subsystems
that can be used for multiple purposes, such as training, simulation, and real use. In
some occasions it is convenient to be able to dynamically switch the subsystem from
operating in the “simulation world” to the “training world” or to the “real world.” For
supervision purposes, it may be convenient to observe multiple worlds, so that you can
compare the each one’s results. This can be accomplished by setting a partition name in
the Publisher that represents the “world” to which it belongs and a set of partition names
in the Subscriber that model the worlds that it can observe.
6.4.5.4 Properties
This QosPolicy can be modified at any time.
Strictly speaking, this QosPolicy does not have request-offered semantics, although it is
matched between DataWriters and DataReaders, and communication is established only
if there is a match between partition names.
6.4.5.5 Related QosPolicies
❏ DOMAIN_PARTICIPANT_RESOURCE_LIMITS QosPolicy (DDS Extension)
(Section 8.5.4).
6.4.5.6 Applicable Entities
❏ Publishers (Section 6.2)
❏ Subscribers (Section 7.2)
Table 6.22 Example of Access-Control Group Partitions
Publisher Partitions Subscriber Partitions Result
Specify several partition
names, one per group
that is allowed access:
Specify multiple partition
names, one per group to which
the Subscriber belongs.
Limits the visibility of the data to
Subscribers that belong to the
access-groups specified by the Pub-
lisher.
“payroll”
“financial”
(Subscriber participant is irrele-
vant here.)
Makes information available only
to Subscribers that have access to
either financial or payroll informa-
tion.
(Publisher participant is
irrelevant here.)
“executives”
“financial”
Gain access to information that is
intended for executives or people
with access to the finances.

6.4 Publisher/Subscriber QosPolicies
6-79
6. Sending Data
6.4.5.7 System Resource Considerations
Partition names are propagated along with the declarations of the DataReaders and the
DataWriters and can be examined by user code through built-in topics (see Chapter 14:
Built-In Topics). Thus the sum-total length of the partition names will impact the band-
width needed to transmit those declarations, as well as the memory used to store them.
The maximum number of partitions and the maximum number of characters that can be
used for the sum-total length of all partition names are configured using the
max_partitions and max_partition_cumulative_characters fields of the
DOMAIN_PARTICIPANT_RESOURCE_LIMITS QosPolicy (DDS Extension) (Section
8.5.4). Setting more partitions or using longer names than allowed by those limits will
result in failure and an INCONSISTENT_QOS_POLICY return code.
However, should you decide to change the maximum number of partitions or maxi-
mum cumulative length of partition names, then you must make certain that all applica-
tions in the RTI Data Distribution Service domain have changed the values of
max_partitions and max_partition_cumulative_characters to be the same. If two appli-
cations have different values for those settings, and one application sets the PARTITION
QosPolicy to hold more partitions or longer names than set by another application, then
the matching DataWriters and DataReaders of the Publisher and Subscriber between the
two applications will not connect. This similar to the restrictions for the GROUP_DATA
(Section 6.4.4), USER_DATA (Section 6.5.23), and TOPIC_DATA (Section 5.2.1) QosPoli-
cies.
6.4.6 PRESENTATION QosPolicy
Usually DataReaders will receive data in the order that it was sent by a DataWriter. In
addition, data is presented to the DataReader as soon as the application receives the next
value expected.
Sometimes, you may want a set of data for the same topic to be presented to the receiv-
ing DataReader only after ALL of the elements of the set have been received, but not
before. You may also want the data to be presented in a different order than it was
received. Specifically, for keyed data, you may want RTI Data Distribution Service to
present the data in keyed or instance order.
The Presentation QosPolicy allows you to specify different scopes of presentation,
within a topic, across instances of a topic, and even across different topics of a publisher
(although this last option is not currently supported by RTI). It also controls whether or
not a set of changes within the scope is delivered at the same time or can be delivered as
soon as each element is received.
Chapter 6
6-80
There are three components to this QoS, the boolean flag coherent_access, the boolean
flag ordered_access, and an enumerated setting for the access_scope. The structure
used is shown in Table 6.23.
Table 6.23 DDS_PresentationQosPolicy
Type Field Name Description
DDS_Presentation_
QosPolicyAccessScopeKind
access_scope
Controls the granularity used when coherent_access
and/or ordered_access are TRUE.
If both coherent_access and ordered_access are
FALSE, access_scope’s setting has no effect.
DDS_INSTANCE_PRESENTATION_QOS: queue is
ordered/sorted per instance
DDS_TOPIC_PRESENTATION_QOS:
queue is ordered/sorted per topic (across all instances)
DDS_Boolean coherent_access
Controls whether RTI Data Distribution Service will
preserve the groupings of changes made by the pub-
lishing application by means of
begin_coherent_changes() and
end_coherent_changes().
DDS_BOOLEAN_FALSE: Coherency is not preserved.
The value of access_scope is ignored.
DDS_BOOLEAN_TRUE:
Changes made to instances
within each DataWriter will be available to the
DataReader as a coherent set, based on the value of
access_scope.
DDS_Boolean ordered_access
Controls whether RTI Data Distribution Service will
preserve the order of changes.
DDS_BOOLEAN_FALSE: The order of samples is only
preserved for each instance, not across instances. The value
of access_scope is ignored.
DDS_BOOLEAN_TRUE: The order of samples from a
DataWriter is preserved, based on the value set in
access_scope.

6.4 Publisher/Subscriber QosPolicies
6-81
6. Sending Data
6.4.6.1 Coherent Access
A 'coherent set' is a set of data-sample modifications that must be propagated in such a
way that they are interpreted at the receiver's side as a consistent set; that is, the receiver
will only be able to access the data after all the modifications in the set are available at
the subscribing end.
Coherency enables a publishing application to change the value of several data-
instances and have those changes be seen atomically (as a cohesive set) by the readers.
Setting coherent_access to TRUE only behaves as described in the DDS specification
when the DataWriter and DataReader are configured for reliable delivery. Non-reliable
DataReaders will never receive samples that belong to a coherent set.
To send a coherent set of data samples, the publishing application uses the Publisher’s
begin_coherent_changes() and end_coherent_changes() operations (see Writing
Coherent Sets of Data Samples (Section 6.3.9)).
If coherent_access is TRUE, then the access_scope controls the maximum extent of the
coherent changes, as follows:
❏ If access_scope is set to INSTANCE, the use of begin_coherent_changes() and
end_coherent_changes() has no effect on how the subscriber can access the data.
This is because, with the scope limited to each instance, changes to separate
instances are considered independent and thus cannot be grouped by a coherent
change.
❏ If access_scope is set to TOPIC, then coherent changes (indicated by their enclo-
sure within calls to begin_coherent_changes() and end_coherent_changes())
will be made available as such to each remote DataReader independently. That is,
changes made to instances within the each individual DataWriter will be avail-
able as a coherent set with respect to other changes to instances in that same
DataWriter, but will not be grouped with changes made to instances belonging to
a different DataWriter.
6.4.6.2 Ordered Access
For a non-keyed Topic, data samples from a single DataWriter will be stored in the
DataReader’s queue in the order they were sent (as one would expect). However, recall
that a To pi c may have multiple data instances only if it uses a keyed data type, see Sam-
ples, Instances, and Keys (Section 2.2.2). So for keyed Top ic s, a single DataWriter may cre-
ate instances, modify the value of instances, or delete instances. Each time, a data
sample (including pseudo or meta-samples for the creation and deletion events) will be
sent and must be stored in the DataReader’s queue.

Chapter 6
6-82
By default, instances are treated as “lightweight” Top ics in that the data samples that
pertain to a particular instance are stored in the order that they are sent by the
DataWriter. This includes the samples that represent the events of instance creation and
deletion.
However, because data samples across different instances of the same Topic are stored in
the same queue for a DataReader, you may want to control whether or not the data sam-
ples are stored in the order sent by the DataWriter—independent of the instance for
which the data sample applies. By default, the Subscriber does not try to sort the data
samples across instances. Since data packets may be delivered out of order by the net-
work, you cannot correlate the data samples between instances, even though they were
generated by the same DataWriter.
For example, if a DataWriter registers three instances, this will generate three packets
that indicate the creation of those instances, resulting in three meta-data samples stored
in a DataReader’s queue. By default, the Subscriber will not try to order these samples if
they were delivered out of order. You may see the sample that indicates the creation of
the third instance before you see the sample that indicates the creation of the first.
However, you can set this QoS so that the DataReader will see all events—creation, mod-
ification, deletion—across all instances written by a DataWriter in the order that they
occurred. Note that this applies to data coming from a single DataWriter only. The sort-
ing of data samples between DataWriters are not affected by this QoS. See
DESTINATION_ORDER QosPolicy (Section 6.5.5) if you would like to control how RTI
Data Distribution Service sorts data across multiple DataWriters of the same Topic.
If ordered_access is TRUE, then the access_scope controls the scope of the ordering, as
follows:
❏ If access_scope is set to INSTANCE, the relative order of samples sent by a
DataWriter is only preserved on an per-instance basis. If two samples refer to the
same instance (identified by Top ic and a particular value for the key) then the
order in which they are stored in the DataReader’s queue is consistent with the
order in which the changes occurred. However, if the two samples belong to dif-
ferent instances, the order in which they are presented may or may not match the
order in which the changes occurred.
❏ If access_scope is set to TOPIC, the relative order of samples sent by a DataWriter
is preserved for all samples of all instances. The coherent grouping and/or order
in which samples appear in the DataReader’s queue is consistent with the group-
ing/order in which the changes occurred—even if the samples affect different
instances.
The data stored in the DataReader is accessed by the DataReader’s read()/take() APIs.
The application does not have to access the data samples in the same order as they are

6.4 Publisher/Subscriber QosPolicies
6-83
6. Sending Data
stored in the queue. How the application actually gets the data from the DataReader is
ultimately under the control of the user code, see Using DataReaders to Access Data
(Read & Take) (Section 7.4).
6.4.6.3 Example
Coherency is useful in cases where the values are inter-related (for example, if there are
two data-instances representing the altitude and velocity vector of the same aircraft and
both are changed, it may be useful to communicate those values in a way the reader can
see both together; otherwise, it may e.g., erroneously interpret that the aircraft is on a
collision course).
Ordered access is useful when you need to ensure that samples appear on the
DataReader’s in the order sent by the DataWriter.
To illustrate the effect of the PRESENTATION QosPolicy, assume the following
sequence of samples was written by the DataWriter: {A1, B1, C1, A2, B2, C2}. In this
example, A, B, and C represent different instances (i.e. different keys). Assume all of
these samples have been propagated to the DataReader history queue before your appli-
cation invokes the read() operation. The data-sample sequence returned will depend on
the setting of the PRESENTATION QoS as shown in Table 6.24.
6.4.6.4 Properties
This QosPolicy cannot be modified after the Publisher or Subscriber is enabled.
This QoS must be set compatibly between the DataWriter’s Publisher and the
DataReader’s Subscriber. The compatible combinations are shown in Table 6.25 for
ordered_access and Table 6.25 for coherent_access.
Table 6.24 Effect of ordered_access in the PRESENTATION QoS
PRESENTATION QoS
Sequence retrieved via “read()”.
Order sent was {A1, B1, C1, A2, B2, C2}
Order received was {A1, A2, B1, B2, C1, C2}
ordered_access = FALSE
access_scope = <any>
{A1, A2, B1, B2, C1, C2}
ordered_access = TRUE
access_scope = INSTANCE
{A1, A2, B1, B2, C1, C2}
ordered_access = TRUE
access_scope = TOPIC
{A1, B1, C1, A2, B2, C2}

Chapter 6
6-84
6.4.6.5 Related QosPolicies
The DESTINATION_ORDER QosPolicy (Section 6.5.5) is closely related and also affects
ordering of data samples on a per-instance basis when there are multiple DataWriters.
6.4.6.6 Applicable Entities
❏ Publishers (Section 6.2)
❏ Subscribers (Section 7.2)
6.4.6.7 System Resource Considerations
The use of this policy does not significantly impact the use of resources.
Table 6.25 Valid Combinations of Presentation Ordered Access and Access Scope
{ordered_access/
access_scope}
Subscriber requests:
False/Instance False/Topic True/Instance True/Topic
Publisher
offers:
False/Instance ✔ incompatible incompatible incompatible
False/Topic ✔✔incompatible incompatible
True/Instance ✔ incompatible ✔ incompatible
True/Topic ✔✔✔✔
Table 6.26 Valid Combinations of Presentation Coherent Access and Access Scope
{coherent_access/
access_scope}
Subscriber requests:
False/Instance False/Topic True/Instance True/Topic
Publisher
offers:
False/Instance ✔ incompatible incompatible incompatible
False/Topic ✔✔incompatible incompatible
True/Instance ✔ incompatible ✔ incompatible
True/Topic ✔✔✔✔

6.5 DataWriter QosPolicies
6-85
6. Sending Data
6.5 DataWriter QosPolicies
This section provides detailed information about the QosPolicies associated with a
DataWriter. Table 6.15 on page 6-50 provides a quick reference. They are presented in
alphabetical order.
❏ BATCH QosPolicy (DDS Extension) (Section 6.5.1)
❏ DATA_WRITER_PROTOCOL QosPolicy (DDS Extension) (Section 6.5.2)
❏ DATA_WRITER_RESOURCE_LIMITS QosPolicy (DDS Extension) (Section 6.5.3)
❏ DEADLINE QosPolicy (Section 6.5.4)
❏ DESTINATION_ORDER QosPolicy (Section 6.5.5)
❏ DURABILITY QosPolicy (Section 6.5.6)
❏ DURABILITY SERVICE QosPolicy (Section 6.5.7)
❏ HISTORY QosPolicy (Section 6.5.8)
❏ LATENCYBUDGET QoS Policy (Section 6.5.9)
❏ LIFESPAN QoS Policy (Section 6.5.10)
❏ LIVELINESS QosPolicy (Section 6.5.11)
❏ MULTI_CHANNEL QosPolicy (DDS Extension) (Section 6.5.12)
❏ OWNERSHIP QosPolicy (Section 6.5.13)
❏ OWNERSHIP_STRENGTH QosPolicy (Section 6.5.14)
❏ PROPERTY QosPolicy (DDS Extension) (Section 6.5.15)
❏ PUBLISH_MODE QosPolicy (DDS Extension) (Section 6.5.16)
❏ RELIABILITY QosPolicy (Section 6.5.17)
❏ RESOURCE_LIMITS QosPolicy (Section 6.5.18)
❏ TRANSPORT_PRIORITY QosPolicy (Section 6.5.19)
❏ TRANSPORT_SELECTION QosPolicy (DDS Extension) (Section 6.5.20)
❏ TRANSPORT_UNICAST QosPolicy (DDS Extension) (Section 6.5.21)
❏ TYPESUPPORT QosPolicy (DDS Extension) (Section 6.5.22)
❏ USER_DATA QosPolicy (Section 6.5.23)
❏ WRITER_DATA_LIFECYCLE QoS Policy (Section 6.5.24)

Chapter 6
6-86
6.5.1 BATCH QosPolicy (DDS Extension)
This QosPolicy can be used to decrease the amount of communication overhead associ-
ated with the transmission and (in the case of reliable communication) acknowledge-
ment of small samples, in order to increase throughput.
It specifies and configures the mechanism that allows RTI Data Distribution Service to
collect multiple user data samples to be sent in a single network packet, to take advan-
tage of the efficiency of sending larger packets and thus increase effective throughput.
This QosPolicy can be used to increase effective throughput dramatically for small data
samples. Throughput for small samples (size < 2048 bytes) is typically limited by CPU
capacity and not by network bandwidth. Batching many smaller samples to be sent in a
single large packet will increase network utilization and thus throughput in terms of
samples per second.
It contains the members listed in Table 6.27.
Table 6.27 DDS_BatchQosPolicy
Type Field Name Description
DDS_Boolean enable Enables/disables batching.
DDS_Long max_data_bytes
Sets the maximum cumulative length of all serial-
ized samples in a batch.
Before or when this limit is reached, the batch is
automatically flushed.
The size does not include the meta-data associ-
ated with the batch samples.
DDS_Long max_samples
Sets the maximum number of samples in a batch.
When this limit is reached, the batch is automati-
cally flushed.
struct DDS_Duration_t max_flush_delay
Sets the maximum flush delay.
When this duration is reached, the batch is auto-
matically flushed.
The delay is measured from the time the first
sample in the batch is written by the application.
6.5 DataWriter QosPolicies
6-87
6. Sending Data
If batching is enabled (not the default), samples are not immediately sent when they are
written. Instead, they get collected into a "batch." A batch always contains whole num-
ber of samples—a sample will never be fragmented into multiple batches.
A batch is sent on the network ("flushed") when one of the following things happens:
❏ User-configurable flushing conditions
• A batch size limit (max_data_bytes) is reached.
• A number of samples are in the batch (max_samples).
struct DDS_Duration_t
source_timestamp_
resolution
Sets the batch source timestamp resolution.
The value of this field determines how the source
timestamp is associated with the samples in a
batch.
A sample written with timestamp 't' inherits the
source timestamp 't2' associated with the previ-
ous sample, unless ('t' - 't2') is greater than
source_timestamp_resolution.
If source_timestamp_resolution is
DURATION_INFINITE, every sample in the
batch will share the source timestamp associated
with the first sample.
If source_timestamp_resolution is zero, every
sample in the batch will contain its own source
timestamp corresponding to the moment when
the sample was written.
The performance of the batching process is better
when source_timestamp_resolution is set to
DURATION_INFINITE.
DDS_Boolean thread_safe_write
Determines whether or not the write operation is
thread-safe.
If TRUE, multiple threads can call write on the
DataWriter concurrently.
A setting of FALSE can be used to increase batch-
ing throughput for batches with many small sam-
ples.
Table 6.27 DDS_BatchQosPolicy
Type Field Name Description

Chapter 6
6-88
• A time-limit (max_flush_delay) is reached, as measured from the time the
first sample in the batch is written by the application.
• The application explicitly calls a DataWriter's flush() operation.
❏ Non-user configurable flushing conditions:
• A coherent set starts or ends.
• The number of samples in the batch is equal to max_samples in
RESOURCE_LIMITS for unkeyed topics or max_samples_per_instance in
RESOURCE_LIMITS for keyed topics.
Additional batching configuration takes place in the Publisher’s
ASYNCHRONOUS_PUBLISHER QosPolicy (DDS Extension) (Section 6.4.1).
The flush() operation is described in Flushing Batches of Data Samples (Section 6.3.8).
6.5.1.1 Synchronous and Asynchronous Flushing
Usually, a batch is flushed synchronously:
❏ When a batch reaches its application-defined size limit (max_data_bytes or
max_samples) because the application called write(), the batch is flushed imme-
diately in the context of the writing thread.
❏ When an application manually flushes a batch, the batch is flushed immediately
in the context of the calling thread.
❏ When the first sample in a coherent set is written, the batch in progress (without
including the sample in the coherent set) is immediately flushed in the context of
the writing thread.
❏ When a coherent set ends, the batch in progress is immediately flushed in the
context of the calling thread.
❏ When the number of samples in a batch is equal to max_samples in
RESOURCE_LIMITS for unkeyed topics or max_samples_per_instance in
RESOURCE_LIMITS for keyed topics, the batch is flushed immediately in the
context of the writing thread.
However, some behavior is asynchronous:
❏ To flush batches based on a time limit (max_flush_delay), enable asynchronous
batch flushing in the ASYNCHRONOUS_PUBLISHER QosPolicy (DDS Exten-
sion) (Section 6.4.1) of the DataWriter's Publisher. This will cause the Publisher to

6.5 DataWriter QosPolicies
6-89
6. Sending Data
create an additional thread that will be used to flush batches of that Publisher's
DataWriters. This behavior is analogous to the way asynchronous publishing
works.
❏ You may also use batching alongside asynchronous publication with Flow Con-
trollers (DDS Extension) (Section 6.6). These features are independent of one
another. Flushing a batch on an asynchronous DataWriter makes it available for
sending to the DataWriter's FlowController. From the point of view of the Flow-
Controller, a batch is treated like one large sample.
6.5.1.2 Batching vs. Coalescing
Even when batching is disabled, RTI Data Distribution Service will sometimes coalesce
multiple samples into a single network datagram. For example, samples buffered by a
FlowController or sent in response to a negative acknowledgement (NACK) may be
coalesced. This behavior is distinct from sample batching.
Samples that are sent individually (not part of a batch) are always treated as separate
samples by RTI Data Distribution Service. Each sample is accompanied by a complete
RTPS header on the network (although samples may share UDP and IP headers) and (in
the case of reliable communication) a unique physical sequence number that must be
positively or negatively acknowledged.
In contrast, batched samples share an RTPS header and an entire batch is acknowledged
—positively or negatively—as a unit, potentially reducing the amount of meta-traffic on
the network and the amount of processing per individual sample.
Batching can also improve latency relative to simply coalescing. Consider two use cases:
1. A DataWriter is configured to write asynchronously with a FlowController. Even
if the FlowController's rules would allow it to publish a new sample immedi-
ately, the send will always happen in the context of the asynchronous publishing
thread. This context switch can add latency to the send path.
2. A DataWriter is configured to write synchronously but with batching turned on.
When the batch is full, it will be sent on the wire immediately, eliminating a
thread context switch from the send path.
6.5.1.3 Batching and ContentFilteredTopics
When batching is enabled, content filtering is always done on the reader side.

Chapter 6
6-90
6.5.1.4 Performance Considerations
The purpose of batching is to increase throughput when writing small samples at a high
rate. In such cases, throughput can be increased several-fold, approaching much more
closely the physical limitations of the underlying network transport.
However, collecting samples into a batch implies that they are not sent on the network
immediately when the application writes them; this can potentially increase latency.
However, if the application sends data faster than the network can support, an
increased proportion of the network's available bandwidth will be spent on acknowl-
edgements and sample resends. In this case, reducing that overhead by turning on
batching could decrease latency while increasing throughput.
As a general rule, to improve batching throughput:
❏ Set thread_safe_write to FALSE when the batch contains a big number of small
samples. If you do not use a thread-safe write configuration, asynchronous batch
flushing must be disabled.
❏ Set source_timestamp_resolution to DURATION_INFINITE. Note that you set
this value, every sample in the batch will share the same source timestamp.
Batching affects how often piggyback heartbeats are sent; see
heartbeats_per_max_samples in Table 6.29, “DDS_RtpsReliableWriterProtocol_t,” on
page 6-95.
6.5.1.5 Maximum Transport Datagram Size
Batches cannot be fragmented. As a result, the maximum batch size (max_data_bytes)
must be set no larger than the maximum transport datagram size. For example, a UDP
datagram is limited to 64 KB, so any batches sent over UDP must be less than or equal to
that size.
6.5.1.6 Properties
This QosPolicy cannot be modified after the DataWriter is enabled.
Since it is only for DataWriters, there are no compatibility restrictions for how it is set on
the publishing and subscribing sides.
All batching configuration occurs on the publishing side.
A subscribing application
does not configure anything specific to receive batched samples, and in many cases, it
will be oblivious to whether the samples it processes were received individually or as
part of a batch.

6.5 DataWriter QosPolicies
6-91
6. Sending Data
Consistency rules:
❏ max_samples must be consistent with max_data_bytes: they cannot both be set
to LENGTH_UNLIMITED.
❏ If max_flush_delay is not DURATION_INFINITE,
disable_asynchronous_batch in the ASYNCHRONOUS_PUBLISHER QosPol-
icy (DDS Extension) (Section 6.4.1) must be FALSE.
❏ If thread_safe_write is FALSE, source_timestamp_resolution must be
DURATION_INFINITE.
6.5.1.7 Related QosPolicies
❏ To flush batches based on a time limit, enable batching in the
ASYNCHRONOUS_PUBLISHER QosPolicy (DDS Extension) (Section 6.4.1) of
the DataWriter's Publisher.
❏ Be careful when configuring a DataWriter's LIFESPAN QoS Policy (Section
6.5.10) with a duration shorter than the batch flush period (max_flush_delay). If
the batch does not fill up before the flush period elapses, the short duration will
cause the samples to be lost without being sent.
❏ Do not configure the DataReader’s or DataWriter’s HISTORY QosPolicy (Section
6.5.8) to be shallower than the DataWriter's maximum batch size (max_samples).
When the HISTORY QosPolicy is shallower on the DataWriter, some samples
may not be sent. When the HISTORY QosPolicy is shallower on the DataReader,
samples may be dropped before being provided to the application.
❏ The initial and maximum numbers of batches that a DataWriter will manage is
set in the DATA_WRITER_RESOURCE_LIMITS QosPolicy (DDS Extension)
(Section 6.5.3).
❏ The maximum number of samples that a DataWriter can store is determined by
the value max_samples in the RESOURCE_LIMITS QosPolicy (Section 6.5.18)
and max_batches in the DATA_WRITER_RESOURCE_LIMITS QosPolicy (DDS
Extension) (Section 6.5.3). The limit that is reached first is applied.
❏ The amount of resources required for batching depends on the configuration of
the RESOURCE_LIMITS QosPolicy (Section 6.5.18) and the
DATA_WRITER_RESOURCE_LIMITS QosPolicy (DDS Extension) (Section
6.5.3). See Section 6.5.1.9.
6.5.1.8 Applicable Entities
❏ DataWriters (Section 6.3)

Chapter 6
6-92
6.5.1.9 System Resource Considerations
❏ Batching requires additional resources to store the meta-data associated with the
samples in the batch.
• For unkeyed topics, the meta-data will be at least 8 bytes, with a maximum
of 20 bytes.
• For keyed topics, the meta-data will be at least 8 bytes, with a maximum of
52 bytes.
❏ Other resource considerations are described in Section 6.5.1.7.
6.5.2 DATA_WRITER_PROTOCOL QosPolicy (DDS Extension)
DDS has a standard protocol for packet (user and meta data) exchange between applica-
tions using DDS for communications. The DataWriterProtocol QosPolicy gives you con-
trol over configurable portions of the protocol, including the configuration of the
reliable data delivery mechanism of the protocol on a per DataWriter basis.
These configuration parameters control timing and timeouts, and give you the ability to
trade off between speed of data loss detection and repair, versus network and CPU
bandwidth used to maintain reliability.
It is important to tune the reliability protocol on a per DataWriter basis to meet the
requirements of the end-user application so that data can be sent between DataWriters
and DataReaders in an efficient and optimal manner in the presence of data loss. You can
also use this QosPolicy to control how DDS responds to "slow" reliable DataReaders or
ones that disconnect or are otherwise lost.
This policy includes the members presented in Table 6.28,
“DDS_DataWriterProtocolQosPolicy,” on page 6-93 and Table 6.29,
“DDS_RtpsReliableWriterProtocol_t,” on page 6-95. For defaults and valid ranges,
please refer to the online documentation.
For details on the reliability protocol used by RTI Data Distribution Service, see
Chapter 10. See the RELIABILITY QosPolicy (Section 6.5.17) for more information on
per-DataReader/DataWriter reliability configuration. The HISTORY QosPolicy (Section
6.5.8) and RESOURCE_LIMITS QosPolicy (Section 6.5.18) also play important roles in
the DDS reliability protocol.

6.5 DataWriter QosPolicies
6-93
6. Sending Data
Table 6.28 DDS_DataWriterProtocolQosPolicy
Type Field Name Description
DDS_GUID_t virtual_guid
The virtual GUID (Global Unique Identifier) is used to uniquely iden-
tify the same DataWriter across multiple incarnations. In other words,
this value allows RTI Data Distribution Service to remember informa-
tion about a DataWriter that may be deleted and then recreated.
RTI Data Distribution Service uses the virtual GUID to associate a
durable writer history to a DataWriter.
RTI DDS Persistence Service uses the virtual GUID to send samples on
behalf of the original DataWriter.
A DataReader persists its state based on the virtual GUIDs of match-
ing remote DataWriters.
For more information, see Durability and Persistence Based on Vir-
tual GUIDs (Section 11.2).
By default, RTI Data Distribution Service will assign a virtual GUID
automatically. If you want to restore the state of the durable writer
history after a restart, you can retrieve the value of the writer's virtual
GUID using the DataWriter’s get_qos() operation, and set the virtual
GUID of the restarted DataWriter to the same value.
DDS_Unsigned-
Long
rtps_object_id
Determines the DataWriter’s RTPS object ID, according to the DDS-
RTPS Interoperability Wire Protocol.
Only the last 3 bytes are used; the most significant byte is ignored.
The rtps_host_id, rtps_app_id, rtps_instance_id in the
WIRE_PROTOCOL QosPolicy (DDS Extension) (Section 8.5.9),
together with the 3 least significant bytes in rtps_object_id, and
another byte assigned by RTI Data Distribution Service to identify the
entity type, forms the BuiltinTopicKey in PublicationBuiltinTopic-
Data.
DDS_Boolean push_on_write
Controls when a sample is sent after write() is called on a DataWriter.
If TRUE, the sample is sent immediately; if FALSE, the sample is put
in a queue until an ACK/NACK is received from a reliable
DataReader.
Note: push_on_write must be TRUE for Asynchronous
DataWriters. Otherwise, samples will never be sent.

Chapter 6
6-94
DDS_Boolean
disable_positive_
acks
Determines whether matching DataReaders send positive acknowl-
edgements (ACKs) to the DataWriter.
When TRUE, the DataWriter will keep samples in its queue for ACK-
disabled readers for a minimum keep duration (see Section 6.5.2.3).
When strict reliability is not required, setting this to TRUE reduces
overhead network traffic.
DDS_Boolean
disable_inline_
keyhash
Controls whether or not the key-hash is propagated on the wire with
samples.
This field only applies to keyed writers.
RTI Data Distribution Service associates a key-hash (an internal 16-byte
representation) with each key.
When FALSE, the key-hash is sent on the wire with every data
instance.
When TRUE, the key-hash is not sent on the wire (so the readers must
compute the value using the received data).
If the reader is CPU bound, sending the key-hash on the wire may
increase performance, because the reader does not have to get the
key-hash from the data.
If the writer is CPU bound, sending the key-hash on the wire may
decrease performance, because it requires more bandwidth (16 more
bytes per sample).
DDS_Boolean
serialize_key_
with_dispose
Controls whether or not the serialized key is propagated on the wire
with dispose notifications.
This field only applies to keyed writers.
RTI recommends setting this field to TRUE if there are DataReaders
with propagate_dispose_of_unregistered_instances (in the
DATA_READER_PROTOCOL QosPolicy (DDS Extension) (Section
7.6.1)) also set to TRUE.
Important: When this field TRUE, batching will not be compatible
with RTI Data Distribution Service 4.3e, 4.4b, or 4.4c—the DataReaders
will receive incorrect data and/or encounter deserialization errors.
DDS_RtpsReliable
WriterProtocol_t
rtps_reliable_
writer
This structure includes the fields in Table 6.29.
Table 6.28 DDS_DataWriterProtocolQosPolicy
Type Field Name Description
Note: Setting disable_inline_keyhash to TRUE is not
compatible with using RTI Real-Time Connect or RTI Recorder.

6.5 DataWriter QosPolicies
6-95
6. Sending Data
Table 6.29 DDS_RtpsReliableWriterProtocol_t
Type Field Name Description
DDS_Long
low_watermark Queue levels that control when to switch between the regu-
lar and fast heartbeat rates (heartbeat_period and
fast_heartbeat_period). See Section 6.5.2.1.
high_watermark
DDS_Duration_t
heartbeat_period
Rates at which to sent heartbeats to DataReaders with
unacknowledged samples. See Section 6.5.2.2 and
Section 10.3.4.1.
fast_heartbeat_period
late_joiner_heartbeat_
period
DDS_Long max_heartbeat_retries
Maximum number of periodic heartbeats sent without
receiving an ACK/NACK packet before marking a
DataReader ‘inactive.’
When a DataReader has not acknowledged all the samples
the reliable DataWriter has sent to it, and
max_heartbeat_retries number of periodic heartbeats
have been sent without receiving any ACK/NACK packets
in return, the DataReader will be marked as inactive (not
alive) and be ignored until it resumes sending ACK/
NACKs.
Note that piggyback heartbeats do not count towards this
value.
See Section 10.3.4.4.
DDS_Boolean
inactivate_nonprogressing_
readers
Allows the DataWriter to treat DataReaders that send succes-
sive non-progressing NACK packets as inactive.
See Section 10.3.4.5.

Chapter 6
6-96
DDS_Long
heartbeats_per_max_
samples
For non-multichannel DataWriters:
• If batching is disabled:
A piggyback heartbeat will be sent every [max_samples/
heartbeats_per_max_samples] number of samples.
heartbeats_per_max_samples must be <=
writer_qos.resource_limits.max_samples
• If batching is enabled:
A piggyback heartbeat will be sent every [max_batches/
heartbeats_per_max_samples] number of samples.
heartbeats_per_max_samples must be <=
writer_qos.resource_limits.max_batches
For multi-channel DataWriters:
A piggyback heartbeat will be sent on a channel every
[max_samples/heartbeats_per_max_samples] number
of samples sent of that channel.
heartbeats_per_max_samples must be <=
writer_qos.resource_limits.max_samples.
See Section 16.6.2 for additional details related to the
multi-channel DataWriter reliability protocol.
DDS_Duration_t min_nack_response_delay
Minimum delay to respond to an ACK/NACK.
When a reliable DataWriter receives an ACK/NACK from a
DataReader, the DataWriter can choose to delay a while
before it sends repair samples or a heartbeat. This set the
value of the minimum delay.
See Section 10.3.4.6.
DDS_Duration_t max_nack_response_delay
Maximum delay to respond to a ACK/NACK.
This sets the value of maximum delay between receiving an
ACK/NACK and sending repair samples or a heartbeat.
A longer wait can help prevent storms of repair packets if
many DataReaders send NACKs at the same time. However,
it delays the repair, and hence increases the latency of the
communication.
See Section 10.3.4.6.
Table 6.29 DDS_RtpsReliableWriterProtocol_t
Type Field Name Description

6.5 DataWriter QosPolicies
6-97
6. Sending Data
DDS_Duration_t nack_suppression_duration
How long consecutive NACKs are suppressed.
When a reliable DataWriter receives consecutive NACKs
within a short duration, this may trigger the DataWriter to
send redundant repair messages. This value sets the dura-
tion during which consecutive NACKs are ignored, thus
preventing redundant repairs from being sent.
DDS_Long
max_bytes_per_nack_
response
Maximum bytes in a repair package.
When a reliable DataWriter resends samples, the total pack-
age size is limited to this value.
See Section 10.3.4.3.
DDS_Duration_t
disable_positive_acks_
min_sample_keep_
duration
Minimum duration that a sample will be kept in the
DataWriter’s queue for ACK-disabled DataReaders.
See Section 6.5.2.3 and Section 10.3.4.7.
disable_positive_acks_
max_sample_keep_
duration
Maximum duration that a sample will be kept in the
DataWriter’s queue for ACK-disabled readers.
DDS_Boolean
disable_positive_acks_
enable_adaptive_
sample_keep_duration
Enables automatic dynamic adjustment of the ‘keep dura-
tion’ in response to network congestion.
DDS_Long
disable_positive_acks_
increase_sample_
keep_duration_factor
When the ‘keep duration’ is dynamically controlled, the
lengthening of the ‘keep duration’ is controlled by this fac-
tor, which is expressed as a percentage.
When the adaptive algorithm determines that the keep
duration should be increased, this factor is multiplied with
the current keep duration to get the new longer keep dura-
tion. For example, if the current keep duration is 20 millisec-
onds, using the default factor of 150% would result in a new
keep duration of 30 milliseconds.
disable_positive_acks_
decrease_sample_
keep_duration_factor
When the ‘keep duration’ is dynamically controlled, the
shortening of the ‘keep duration’ is controlled by this factor,
which is expressed as a percentage.
When the adaptive algorithm determines that the keep
duration should be decreased, this factor is multiplied with
the current keep duration to get the new shorter keep dura-
tion. For example, if the current keep duration is 20 millisec-
onds, using the default factor of 95% would result in a new
keep duration of 19 milliseconds.
Table 6.29 DDS_RtpsReliableWriterProtocol_t
Type Field Name Description
Chapter 6
6-98
6.5.2.1 High and Low Watermarks
When the number of unacknowledged samples in the queue of a reliable DataWriter
exceeds high_watermark, the RELIABLE_WRITER_CACHE_CHANGED Status (DDS
Extension) (Section 6.3.5.7) will be changed appropriately, a listener callback will be trig-
gered, and the DataWriter will start heartbeating its matched DataReaders at
fast_heartbeat_rate.
When the number of samples falls below low_watermark, the
RELIABLE_WRITER_CACHE_CHANGED Status (DDS Extension) (Section 6.3.5.7) will
be changed appropriately, a listener callback will be triggered, and the heartbeat rate
will return to the "normal" rate (heartbeat_rate).
Having both high and low watermarks (instead of one) helps prevent rapid flickering
between the rates, which could happen if the number of samples hovers near the cut-off
point.
Increasing the high and low watermarks will make the DataWriters less aggressive
about seeking acknowledgments for sent data, decreasing the size of traffic spikes but
slowing performance.
Decreasing the watermarks will make the DataWriters more aggressive, increasing both
network utilization and performance.
DDS_Long
min_send_window_size Minimum and maximum size for the window of outstand-
ing samples.
See Configuring the Send Window Size (Section 6.5.2.4).
max_send_window_size
DDS_Long
send_window_decrease_
factor
Scales the current send-window size down by this percent-
age to decrease the effective send-rate in response to
received negative acknowledgement.
See Configuring the Send Window Size (Section 6.5.2.4).
DDS_Long
send_window_increase_
factor
Scales the current send-window size up by this percentage
to increase the effective send-rate when a duration has
passed without any received negative acknowledgements.
See Configuring the Send Window Size (Section 6.5.2.4)
DDS_Duration
send_window_update_
period
Period in which DataWriter checks for received negative
acknowledgements and conditionally increases the send-
window size when none are received.
See Configuring the Send Window Size (Section 6.5.2.4)
Table 6.29 DDS_RtpsReliableWriterProtocol_t
Type Field Name Description

6.5 DataWriter QosPolicies
6-99
6. Sending Data
If batching is used and the DataWriter is not a multi-channel DataWriter,
high_watermark and low_watermark refer to batches, not samples. For multi-channel
DataWriters, high_watermark and low_watermark always refer to samples (see
Section 16.6.2 for additional details related to the multi-channel DataWriter reliability
protocol).
6.5.2.2 Normal, Fast, and Late-Joiner Heartbeat Periods
The normal heartbeat_period is used until the number of samples in the reliable
DataWriter’s queue exceeds high_watermark; then fast_heartbeat_period is used. Once
the number of samples drops below low_watermark, heartbeat_period is used again.
❏ fast_heartbeat_period must be <= heartbeat_period
Increasing fast_heartbeat_period increases the speed of discovery, but results in a larger
surge of traffic when the DataWriter is waiting for acknowledgments.
Decreasing heartbeat_period decreases the steady state traffic on the wire, but may
increase latency by decreasing the speed of repairs for lost packets when the writer does
not have very many outstanding unacknowledged samples.
Having two periodic heartbeat rates, and switching between them based on water-
marks:
❏ Ensures that all DataReaders receive all their data as quickly as possible (the
sooner they receive a heartbeat, the sooner they can send a NACK, and the
sooner the DataWriter can send repair samples);
❏ Helps prevent the DataWriter from overflowing its resource limits (as its queue
starts the fill, the DataWriter sends heartbeats faster, prompting the DataReaders
to acknowledge sooner, allowing the DataWriter to purge these acknowledged
samples from its queue);
❏ Tunes the amount of network traffic. (Heartbeats and NACKs use up network
bandwidth like any other traffic; decreasing the heartbeat rates, or increasing the
threshold before the fast rate starts, can smooth network traffic—at the expense
of discovery performance).
The late_joiner_heartbeat_period is used when a reliable DataReader joins after a reli-
able DataWriter (with non-volatile Durability) has begun publishing samples. Once the
late-joining DataReader has received all cached samples, it will be serviced at the same
rate as other reliable DataReaders.
❏ late_joiner_heartbeat_period must be <= heartbeat_period

Chapter 6
6-100
6.5.2.3 Disabling Positive Acknowledgements
When strict reliable communication is not required, you can configure RTI Data Distribu-
tion Service so that it does not send positive acknowledgements (ACKs). In this case, reli-
ability is maintained solely based on negative acknowledgements (NACKs). The
removal of ACK traffic may improve middleware performance. For example, when
sending samples over multicast, ACK-storms that previously may have hindered
DataWriters and consumed overhead network bandwidth are now precluded.
By default, DataWriters and DataReaders are configured with positive ACKS enabled. To
disable ACKs, either:
❏ Configure the DataWriter to disable positive ACKs for all matching DataReaders
(by setting disable_positive_acks to TRUE in the DATA_WRITER_PROTOCOL
QosPolicy (DDS Extension) (Section 6.5.2)).
❏ Disable ACKs for individual DataReaders (by setting disable_positive_acks to
TRUE in the
DATA_READER_PROTOCOL QosPolicy (DDS Extension) (Section 7.6.1)).
If ACKs are disabled, instead of the DataWriter holding a sample in its send queue until
all of its DataReaders have ACKed it, the DataWriter will hold a sample for a configurable
duration. This “keep-duration" starts when a sample is written. When this time elapses,
the sample is logically considered as acknowledged by its ACK-disabled readers.
The length of the "keep-duration" can be static or dynamic, depending on how
rtps_reliable_writer.disable_positive_acks_enable_adaptive_sample_keep_duration
is set.
❏ When the length is static, the "keep-duration" is set to the minimum
(rtps_reliable_writer.disable_positive_acks_min_sample_keep_duration).
❏ When the length is dynamic, the "keep-duration" is dynamically adjusted
between the minimum and maximum durations
(rtps_reliable_writer.disable_positive_acks_min_sample_keep_duration and
rtps_reliable_writer.disable_positive_acks_max_sample_keep_duration).
Dynamic adjustment maximizes throughput and reliability in response to current net-
work conditions: when the network is congested, durations are increased to decrease
the effective send rate and relieve the congestion; when the network is not congested,
durations are decreased to increase the send rate and maximize throughput.
You should configure the minimum "keep-duration" to allow at least enough time for a
possible NACK to be received and processed. When a DataWriter has both matching
ACK-disabled and ACK-enabled DataReaders, it holds a sample in its queue until all
ACK-enabled DataReaders have ACKed it and the "keep-duration" has elapsed.

6.5 DataWriter QosPolicies
6-101
6. Sending Data
See also: Disabling Positive Acknowledgements
(disable_postive_acks_min_sample_keep_duration) (Section 10.3.4.7).
6.5.2.4 Configuring the Send Window Size
When a reliable DataWriter writes a sample, it keeps the sample in its queue until it has
received acknowledgements from all of its subscribing DataReaders. The number of
these outstanding samples is referred to as the DataWriter's "send window." Once the
number of outstanding samples has reached the send window size, subsequent writes
will block until an outstanding sample is acknowledged.
Configuration of the send window sets a minimum and maximum size, which may be
unlimited. The min and max send windows can be the same. When set differently, the
send window will dynamically change in response to detected network congestion, as
signaled by received negative acknowledgements. When NACKs are received, the
DataWriter responds to the slowed reader by decreasing the send window by the
send_window_decrease_factor to throttle down its effective send rate. The send win-
dow will not be decreased to less than the min_send_window_size. After a period
(send_window_update_period) during which no NACKs are received, indicating that
the reader is catching up, the DataWriter will increase the send window size to increase
the effective send rate by the percentage specified by send_window_increase_factor.
The send window will increase to no greater than the max_send_window_size.
6.5.2.5 Propagating Serialized Keys with Disposed-Instance Notifications
This section describes the interaction between these two fields:
❏ serialize_key_with_dispose in DATA_WRITER_PROTOCOL QosPolicy (DDS
Extension) (Section 6.5.2)
❏ propagate_dispose_of_unregistered_instances in
DATA_READER_PROTOCOL QosPolicy (DDS Extension) (Section 7.6.1)
RTI recommends setting serialize_key_with_dispose to TRUE if there are DataReaders
with propagate_dispose_of_unregistered_instances also set to TRUE. However, it is
permissible to set one to TRUE and the other to FALSE. The following examples will
help you understand how these fields work.
See also: Disposing of Data (Section 6.3.11.2).
Example 1
1. DataWriter’s serialize_key_with_dispose = false
2. DataReader’s propagate_dispose_of_unregistered_instances = true
3. DataWriter calls dispose() before writing any samples

Chapter 6
6-102
4. DataReader calls take() and receives a disposed-instance notification (without a
key)
5. DataReader calls get_key_value(), which returns an error because there is no key
associated with the disposed-instance notification
Example 2
1. DataWriter’s serialize_key_with_dispose = true
2. DataReader’s propagate_dispose_of_unregistered_instances = false
3. DataWriter calls dispose() before writing any samples
4. DataReader calls take(), which does not return any samples because none were
written, and it does not receive any disposed-instance notifications because
propagate_dispose_of_unregistered_instances = false
Example 3
1. DataWriter’s serialize_key_with_dispose = true
2. DataReader’s propagate_dispose_of_unregistered_instances = true
3. DataWriter calls dispose() before writing any samples
4. DataReader calls take() and receives the disposed-instance notification
5. DataReader calls get_key_value() and receives the key for the disposed-instance
notification
Example 4
1. DataWriter’s serialize_key_with_dispose = true
2. DataReader’s propagate_dispose_of_unregistered_instances = true
3. DataWriter calls write(), which writes a sample with a key
4. DataWriter calls dispose(), which writes a disposed-instance notification with a
key
5. DataReader calls take() and receives a data sample and a disposed-instance notifi-
cation; both have keys
6. DataReader calls get_key_value() with no errors
6.5.2.6 Example
For information on how to use the fields in Table 6.29, see Controlling Heartbeats and
Retries with the DataWriterProtocol QosPolicy (Section 10.3.4).

6.5 DataWriter QosPolicies
6-103
6. Sending Data
The following describes a use case for when to change push_on_write to
DDS_BOOLEAN_FALSE. Suppose you have a system in which the data packets being
sent is very small. However, you want the data to be sent reliably, and the latency
between the time that data is sent to the time that data is received is not an issue. How-
ever, the total network bandwidth between the DataWriter and DataReader applications
is limited.
If the DataWriter sends a burst of data a a high rate, it is possible that it will overwhelm
the limited bandwidth of the network. If you allocate enough space for the DataWriter to
store the data burst being sent (see RESOURCE_LIMITS QosPolicy (Section 6.5.18)),
then you can use the push_on_write parameter of the DATA_WRITER_PROTOCOL
QosPolicy to delay sending the data until the reliable DataReader asks for it.
By setting push_on_write to DDS_BOOLEAN_FALSE, when write() is called on the
DataWriter, no data is actually sent. Instead data is stored in the DataWriter’s send
queue. Periodically, RTI Data Distribution Service will be sending heartbeats informing
the DataReader about the data that is available. So every heartbeat period, the
DataReader will realize that the DataWriter has new data, and it will send an ACK/
NACK, asking for them.
When DataWriter receives the ACK/NACK packet, it will put together a package of
data, up to the size set by the parameter max_bytes_per_nack_response, to be sent to
the DataReader. This method not only self-throttles the send rate, but also uses network
bandwidth more efficiently by eliminating redundant packet headers when combining
several small packets into one larger one.
6.5.2.7 Properties
This QosPolicy cannot be modified after the DataWriter is created.
Since it is only for DataWriters, there are no compatibility restrictions for how it is set on
the publishing and subscribing sides.
When setting the fields in this policy, the following rules apply. If any of these are false,
RTI Data Distribution Service returns DDS_RETCODE_INCONSISTENT_POLICY:
❏ min_nack_response_delay <= max_nack_response_delay
❏ fast_heartbeat_period <= heartbeat_period
❏ late_joiner_heartbeat_period <= heartbeat_period
❏ low_watermark < high_watermark
❏ If batching is disabled or the DataWriter is a multi-channel DataWriter:
• heartbeats_per_max_samples <= writer_qos.resource_limits.max_samples

Chapter 6
6-104
❏ If batching is enabled and the DataWriter is not a multi-channel DataWriter:
• heartbeats_per_max_samples <= writer_qos.resource_limits.max_batches
6.5.2.8 Related QosPolicies
❏ DATA_READER_PROTOCOL QosPolicy (DDS Extension) (Section 7.6.1)
❏ HISTORY QosPolicy (Section 6.5.8)
❏ RELIABILITY QosPolicy (Section 6.5.17)
6.5.2.9 Applicable Entities
❏ DataWriters (Section 6.3)
6.5.2.10 System Resource Considerations
A high max_bytes_per_nack_response may increase the instantaneous network band-
width required to send a single burst of traffic for resending dropped packets.
6.5.3 DATA_WRITER_RESOURCE_LIMITS QosPolicy (DDS Extension)
This QosPolicy defines various settings that configure how DataWriters allocate and use
physical memory for internal resources.
It includes the members in Table 6.30. For defaults and valid ranges, please refer to the
online documentation.
DataWriters must allocate internal structures to handle the simultaneous blocking of
threads trying to call write() on the same DataWriter, for the storage used to batch small
samples, and for content-based filters specified by DataReaders.
Most of these internal structures start at an initial size and by default, will grow as
needed by dynamically allocating additional memory. You may set fixed, maximum
sizes for these internal structures if you want to bound the amount of memory that a
DataWriter can use. By setting the initial size to the maximum size, you will prevent RTI
Data Distribution Service from dynamically allocating any memory after the creation of
the DataWriter.
6.5 DataWriter QosPolicies
6-105
6. Sending Data
Table 6.30 DDS_DataWriterResourceLimitsQosPolicy
Type Field Name Description
DDS_Long
initial_concurrent_blocking_threads
Initial number of threads that are
allowed to concurrently block on the
write() call on the same DataWriter.
max_concurrent_blocking_threads
Maximum number of threads that are
allowed to concurrently block on
write() call on the same DataWriter.
max_remote_reader_filters
Maximum number of remote
DataReaders for which this DataWriter
will perform content-based filtering.
initial_batches
Initial number of batches that a
DataWriter will manage if batching is
enabled.
max_batches
Maximum number of batches that a
DataWriter will manage if batching is
enabled.
When batching is enabled, the maxi-
mum number of samples that a
DataWriter can store is limited by this
value and max_samples in
RESOURCE_LIMITS QosPolicy (Sec-
tion 6.5.18).
DDS_DataWriter
ResourceLim-
itsInstanceRe-
placementKind
instance_replacement
Sets the kinds of instances allowed to
be replaced when a DataWriter reaches
instance resource limits.
(see
Configuring DataWriter Instance
Replacement (Section 6.5.18.2)
DDS_Boolean replace_empty_instances
Whether to replace empty instances
during instance replacement.
(see
Configuring DataWriter Instance
Replacement (Section 6.5.18.2)
DDS_Boolean autoregister_instances
Whether to register automatically
instances written with non-NIL handle
that are not yet registered, which will
otherwise return an error. This can be
especially useful if the instance has
been replaced.

Chapter 6
6-106
When setting the fields in this policy, the following rule applies. If this is false, RTI Data
Distribution Service returns DDS_RETCODE_INCONSISTENT_POLICY:
❏ max_concurrent_blocking_threads >= initial_concurrent_blocking_threads
The initial_concurrent_blocking_threads is the used to allocate necessary system
resource initially. If necessary, it will be increased automatically up to the
max_concurrent_blocking_threads limit.
Every user thread calling write() on a DataWriter may use a semaphore that will block
the thread when the DataWriter’s send queue is full. Because user code may set a time-
out, each thread must use a different semaphore. See the max_blocking_time parameter
of the RELIABILITY QosPolicy (Section 6.5.17). This QoS is offered so that the user
application can control the dynamic allocation of system resources by RTI Data Distribu-
tion Service.
If you do not mind if RTI Data Distribution Service dynamically allocates semaphores
when needed, then you can set the max_concurrent_blocking_threads parameter to
some large value like MAX_INT. However, if you know exactly how many threads will
be calling write() on the same DataWriter, and you do not want RTI Data Distribution Ser-
vice to allocate any system resources or memory after initialization, then you should set:
max_concurrent_blocking_threads
= initial_concurrent_blocking_threads = NUM
(where NUM is the number of threads that could possibly block concurrently).
Each DataWriter can perform content-based data filtering for up to
max_remote_reader_filters number of DataReaders. Setting the value to 0 will disable
filtering by the DataWriter, which means that the DataReader will have to filter the data
itself. For more information, see ContentFilteredTopics (Section 5.4).
6.5.3.1 Example
If there are multiple threads that can write on the same DataWriter, and the write() oper-
ation may block (based on reliability_qos.max_blocking_time and HISTORY settings),
you may want to set initial_concurrent_blocking_threads to the most likely number of
threads that will block on the same DataWriter at the same time, and set
max_concurrent_blocking_threads to the maximum number of threads that could
potentially block in the worst case.
6.5.3.2 Properties
This QosPolicy cannot be modified after the DataWriter is created.
Since it is only for DataWriters, there are no compatibility restrictions for how it is set on
the publishing and subscribing sides.

6.5 DataWriter QosPolicies
6-107
6. Sending Data
6.5.3.3 Related QosPolicies
❏ BATCH QosPolicy (DDS Extension) (Section 6.5.1)
❏ RELIABILITY QosPolicy (Section 6.5.17)
❏ HISTORY QosPolicy (Section 6.5.8)
6.5.3.4 Applicable Entities
❏ DataWriters (Section 6.3)
6.5.3.5 System Resource Considerations
Increasing the values in this QosPolicy will cause more memory usage and more system
resource usage.
6.5.4 DEADLINE QosPolicy
On a DataWriter, this QosPolicy states the maximum period in which the application
expects to call write() on the DataWriter, thus publishing a new sample. The application
may call write() faster than the rate set by this QosPolicy.
On a DataReader, this QosPolicy states the maximum period in which the application
expects to receive new values for the Topic. The application may receive data faster than
the rate set by this QosPolicy.
The DEADLINE QosPolicy has a single member, shown in Table 6.31. For the default
and valid range, please refer to the online documentation.
You can use this QosPolicy during system integration to ensure that applications have
been coded to meet design specifications. You can also use it during run time to detect
when systems are performing outside of design specifications. Receiving applications
can take appropriate actions to prevent total system failure when data is not received in
time. For topics on which data is not expected to be periodic, the deadline period should
be set to an infinite value.
Table 6.31 DDS_DeadlineQosPolicy
Type Field Name Description
DDS_Duration_t period
For DataWriters: maximum time between writing a new
value of an instance.
For DataReaders: maximum time between receiving new
values for an instance.

Chapter 6
6-108
For keyed topics, the DEADLINE QoS applies on a per-instance basis. An application
must call write() for each known instance of the Topic within the period specified by the
DEADLINE on the DataWriter or receive a new value for each known instance within
the period specified by the DEADLINE on the DataReader. For a DataWriter, the deadline
period begins when the instance is first written or registered. For a DataReader, the dead-
line period begins when the first sample is received.
RTI Data Distribution Service will modify the
DDS_OFFERED_DEADLINE_MISSED_STATUS and call the associated method in
the DataWriterListener (see OFFERED_DEADLINE_MISSED Status (Section 6.3.5.4)) if
the application fails to write() a value for an instance within the period set by the
DEADLINE QosPolicy of the DataWriter.
Similarly, RTI Data Distribution Service will modify the
DDS_REQUESTED_DEADLINE_MISSED_STATUS and call the associated method
in the DataReaderListener (see REQUESTED_DEADLINE_MISSED Status (Section
7.3.6.5)) if the application fails to receive a value for an instance within the period set by
the DEADLINE QosPolicy of the DataReader.
For DataReaders, the DEADLINE QosPolicy and the TIME_BASED_FILTER QosPolicy
(Section 7.6.4) may interact such that even though the DataWriter writes samples fast
enough to fulfill its commitment to its own DEADLINE QosPolicy, the DataReader may
see violations of its DEADLINE QosPolicy. This happens because RTI Data Distribution
Service will drop any packets received within the minimum_separation set by the
TIME_BASED_FILTER—packets that could satisfy the DataReader’s deadline.
To avoid triggering the DataReader’s deadline even though the matched DataWriter is
meeting its own deadline, set your QoS parameters to meet the following relationship:
reader deadline period >=
reader minimum_separation + writer deadline period
Although you can set the DEADLINE QosPolicy on Topi cs, its value can only be used to
initialize the DEADLINE QosPolicies of either a DataWriter or DataReader. It does not
directly affect the operation of RTI Data Distribution Service, see Section 5.1.3.
6.5.4.1 Example
Suppose you have a time-critical piece of data that should be updated at least once
every second. You can set the DEADLINE period to 1 second on both the DataWriter
and DataReader. If there is no update within that time, the DataWriter will get an
on_offered_deadline_missed Listener callback, and the DataReader will get
on_requested_deadline_missed, so that both sides can handle the error situation prop-
erly.

6.5 DataWriter QosPolicies
6-109
6. Sending Data
Note that in practice, there will be latency and jitter in the time between when data is
send and when data is received. Thus even if the DataWriter is sending data at exactly 1
second intervals, the DataReader may not receive the data at exactly 1 second intervals.
More likely, it will DataReader will receive the data at 1 second plus a small variable
quantity of time. Thus you should accommodate this practical reality in choosing the
DEADLINE period as well as the actual update period of the DataWriter or else your
application may receive false indications of failure.
The DEADLINE QosPolicy also interacts with the OWNERSHIP QosPolicy when
OWNERSHIP is set to EXCLUSIVE. If a DataReader fails to receive data from the high-
est strength DataWriter within its requested DEADLINE, then the DataReaders can fail-
over to lower strength DataWriters, see the OWNERSHIP QosPolicy (Section 6.5.13).
6.5.4.2 Properties
This QosPolicy can be changed at any time.
The deadlines on the two sides must be compatible.
DataWriter’s DEADLINE period <= the DataReader’s DEADLINE period.
That is, the DataReader cannot expect to receive samples more often than the DataWriter
commits to sending them.
If the DataReader and DataWriter have compatible deadlines, RTI Data Distribution Ser-
vice monitors this “contract” and informs the application of any violations. If the dead-
lines are incompatible, both sides are informed and communication does not occur. The
ON_OFFERED_INCOMPATIBLE_QOS and the
ON_REQUESTED_INCOMPATIBLE_QOS statuses will be modified and the corre-
sponding Listeners called for the DataWriter and DataReader respectively.
6.5.4.3 Related QosPolicies
❏ LIVELINESS QosPolicy (Section 6.5.11)
❏ OWNERSHIP QosPolicy (Section 6.5.13)
❏ TIME_BASED_FILTER QosPolicy (Section 7.6.4)
6.5.4.4 Applicable Entities
❏ Topics (Section 5.1)
❏ DataWriters (Section 6.3)
❏ DataReaders (Section 7.3)

Chapter 6
6-110
6.5.4.5 System Resource Considerations
There is an RTI Data Distribution Service-internal thread that will wake up at least by the
DEADLINE period to check to see if the deadline was missed. It may wake up faster if
the last sample that was published or sent was close to the last time that the deadline
was checked. Therefore a short period will use more CPU to wake and execute the
thread checking the deadline.
6.5.5 DESTINATION_ORDER QosPolicy
When multiple DataWriters send data for the same topic, the order in which data from
different DataWriters are received by the applications of different DataReaders may be
different. Thus different DataReaders may not receive the same "last" value when
DataWriters stop sending data.
This policy controls how each subscriber resolves the final value of a data instance that
is written by multiple DataWriters (which may be associated with different Publishers)
running on different nodes.
This QosPolicy can be used to create systems that have the property of "eventual consis-
tency." Thus intermediate states across multiple applications may be inconsistent, but
when DataWriters stop sending changes to the same topic, all applications will end up
having the same state.
Each data sample includes two timestamps: a source timestamp and a destination time-
stamp. The source timestamp is recorded by the DataWriter application when the data
was written. The destination timestamp is recorded by the DataReader application when
the data was received.
This QoS includes the member in Table 6.32.
Each DataReader can set this QoS to:
❏ DDS_BY_RECEPTION_TIMESTAMP_DESTINATIONORDER_QOS
Assuming the OWNERSHIP_STRENGTH allows it, the latest received value for
the instance should be the one whose value is kept. Data will be delivered by a
DataReader in the order in which it was received (which may lead to inconsistent
final values).

6.5 DataWriter QosPolicies
6-111
6. Sending Data
❏ DDS_BY_SOURCE_TIMESTAMP_DESTINATIONORDER_QOS
Assuming the OWNERSHIP_STRENGTH allows it, within each instance, the
source_timestamp shall be used to determine the most recent information. This
is the only setting that, in the case of concurrent same-strength DataWriters
updating the same instance, ensures all subscribers will end up with the same
final value for the instance.
Data will be delivered by a DataReader in the order in which it was sent. If data
arrives on the network with a source timestamp earlier than the source time-
stamp of the last data delivered, the new data will be dropped. This ordering
therefore works best when system clocks are relatively synchronized among
writing machines.
Not all data sent by multiple DataWriters may be delivered to a DataReader and
not all DataReaders will see the same data sent by DataWriters. However, all
DataReaders will see the same "final" data when DataWriters "stop" sending data.
• For a DataWriter with kind
DDS_BY_SOURCE_TIMESTAMP_DESTINATIONORDER_QOS:
When writing a sample, its timestamp must not be less than the timestamp
of the previously written sample. However, if it is less than the timestamp
of the previously written sample but the difference is less than this toler-
ance, the sample will use the previously written sample's timestamp as its
timestamp. Otherwise, if the difference is greater than this tolerance, the
write will fail.
See also: Special instructions for deleting DataWriters if you are using the
‘Timestamp’ APIs and BY_SOURCE_TIMESTAMP Destination Order: on
page 6-26.
Table 6.32 DDS_DestinationOrderQosPolicy
Type Field Name Description
DDS_Destination-
OrderQosPolicyKind
kind
Can be either:
DDS_BY_RECEPTION_TIMESTAMP_
DESTINATIONORDER_QOS
DDS_BY_SOURCE_TIMESTAMP_
DESTINATIONORDER_QOS
DDS_Duration_t source_timestamp_tolerance
Allowed tolerance between source time-
stamps of consecutive samples.
Only applies when kind (above) is set to
DDS_BY_SOURCE_TIMESTAMP_
DESTINATIONORDER_QOS.

Chapter 6
6-112
• A DataReader with kind
DDS_BY_SOURCE_TIMESTAMP_DESTINATIONORDER_QOS will
accept a sample only if the difference between the sample’s source time-
stamp and the reception timestamp is no greater than
source_timestamp_tolerance. Otherwise, the sample is rejected.
Although you can set the DESTINATION_ORDER QosPolicy on To pi cs , its value can
only be used to initialize the DESTINATION_ORDER QosPolicies of either a DataWriter
or DataReader. It does not directly affect the operation of RTI Data Distribution Service, see
Section 5.1.3.
6.5.5.1 Properties
This QosPolicy cannot be modified after the Entity is enabled.
This QoS must be set compatibly between the DataWriter and the DataReader. The com-
patible combinations are shown in Table 6.33.
If this QosPolicy is set incompatibly, the ON_OFFERED_INCOMPATIBLE_QOS and
ON_REQUESTED_INCOMPATIBLE_QOS statuses will be modified and the corre-
sponding Listeners called for the DataWriter and DataReader respectively.
6.5.5.2 Related QosPolicies
❏ OWNERSHIP QosPolicy (Section 6.5.13)
❏ HISTORY QosPolicy (Section 6.5.8)
6.5.5.3 Applicable Entities
❏ Topics (Section 5.1)
❏ DataWriters (Section 6.3)
❏ DataReaders (Section 7.3)
6.5.5.4 System Resource Considerations
The use of this policy does not significantly impact the use of resources.
Table 6.33 Valid Reader/Writer Combinations of DestinationOrder
Destination Order
DataReader requests:
BY_SOURCE BY_RECEPTION
DataWriter offers:
BY_SOURCE ✔✔
BY_RECEPTION incompatible ✔

6.5 DataWriter QosPolicies
6-113
6. Sending Data
6.5.6 DURABILITY QosPolicy
Because the publish-subscribe paradigm is connectionless, applications can create pub-
lications and subscriptions in any way they choose. As soon as a matching pair of
DataWriters and DataReaders exist, then data published by the DataWriter will be deliv-
ered to the DataReader. However, a DataWriter may publish data before a DataReader has
been created. For example, before you subscribe to a magazine, there have been past
issues that were published.
The DURABILITY QosPolicy controls whether or not, and how, published samples are
stored by the DataWriter application for DataReaders that are found after the samples
were initially written. DataReaders use this QoS to request samples that were published
before they were created. The analogy is for a new subscriber to a magazine to ask for
issues that were published in the past. These are known as ‘historical’ data-samples.
(Reliable DataReaders may wait for these historical samples, see Section 7.3.5.)
This QosPolicy can be used to help ensure that DataReaders get all data that was sent by
DataWriters, regardless of when it was sent. This QosPolicy can increase system toler-
ance to failure conditions.
Exactly how many samples are stored by the DataWriter or requested by the DataReader
is controlled using the HISTORY QosPolicy (Section 6.5.8).
For more information, please see Chapter 11: Mechanisms for Achieving Information
Durability and Persistence.
The possible settings for this QoS are:
❏ DDS_VOLATILE_DURABILITY_QOS RTI Data Distribution Service is not required to
send and will not deliver any data samples to DataReaders that are discovered
after the samples were initially published.
❏ DDS_TRANSIENT_LOCAL_DURABILITY_QOS RTI Data Distribution Service will store
and send previously published samples for delivery to newly discovered
DataReaders as long as the DataWriter entity still exists. For this setting to be
effective, you must also set the RELIABILITY QosPolicy (Section 6.5.17) kind to
Reliable (not Best Effort). The HISTORY QosPolicy (Section 6.5.8) of the
DataReaders/DataWriters used by RTI Persistence Service determines exactly how
many samples are saved or delivered by RTI Persistence Service.
❏ DDS_TRANSIENT_DURABILITY_QOS RTI Data Distribution Service will store previ-
ously published samples in memory using RTI Persistence Service
1
, which will
send the stored data to newly discovered DataReaders. The HISTORY QosPolicy
1. RTI Persistence Service is included with RTI Data Distribution Service Professional Edition and Elite Edi-
tion.

Chapter 6
6-114
(Section 6.5.8) of the DataReaders/DataWriters used by RTI Persistence Service
determines exactly how many samples are saved or delivered RTI Persistence Ser-
vice.
❏ DDS_PERSISTENT_DURABILITY_QOS RTI Data Distribution Service will store previ-
ously published samples in permanent storage, like a disk, using RTI Persistence
Service
1
, which will send the stored data to newly discovered DataReaders. The
HISTORY QosPolicy (Section 6.5.8) determines exactly how many samples are
saved or delivered.
This QosPolicy includes the members in Table 6.34. For default settings, please refer to
the online documentation.
Table 6.34 DDS_DurabilityQosPolicy
Type Field Name Description
DDS_Durability
QosPolicyKind
kind
DDS_VOLATILE_DURABILITY_QOS:
Do not save or deliver old samples.
DDS_TRANSIENT_LOCAL_DURABILITY_QOS:
Save and deliver old samples if the DataWriter still
exists.
DDS_TRANSIENT_DURABILITY_QOS:
Save and deliver old samples using a memory-based
service.
DDS_PERSISTENCE_DURABILITY_QOS:
Save and deliver old samples using disk-based service.
DDS_Boolean
direct_
communication
Whether or not a TRANSIENT or PERSISTENT DataReader
should receive samples directly from a TRANSIENT or
PERSISTENT DataWriter.
When TRUE, a TRANSIENT or PERSISTENT DataReader
will receive samples directly from the original DataWriter.
The DataReader may also receive samples from RTI Persis-
tence Service
a
but the duplicates will be filtered by the mid-
dleware.
When FALSE, a TRANSIENT or PERSISTENT DataReader
will receive samples only from the DataWriter created by
RTI Persistence Service. This ‘relay communication’ pattern
provides a way to guarantee eventual consistency.
See RTI Persistence Service (Section 11.5.1).
This field only applies to DataReaders.

6.5 DataWriter QosPolicies
6-115
6. Sending Data
6.5.6.1 Example
Suppose you have a DataWriter that sends data sporadically and its DURABILITY kind
is set to VOLATILE. If a new DataReader joins the system, it won’t see any data until the
next time that write() is called on the DataWriter. If you want the DataReader to receive
any data that is valid, old or new, both sides should set their DURABILITY kind to
TRANSIENT_LOCAL. This will ensure that the DataReader gets some of the previous
samples immediately after it is enabled.
6.5.6.2 Properties
This QosPolicy cannot be modified after the Entity has been created.
The DataWriter and DataReader must use compatible settings for this QosPolicy. To be
compatible, the DataWriter and DataReader must use one of the valid combinations
shown in Table 6.35.
If this QosPolicy is found to be incompatible, the
ON_OFFERED_INCOMPATIBLE_QOS and
ON_REQUESTED_INCOMPATIBLE_QOS statuses will be modified and the corre-
sponding Listeners called for the DataWriter and DataReader respectively.
a. RTI Persistence Service is included with RTI Data Distribution Service Professional Edition and Elite Edi-
tion. See Chapter 11
.
Table 6.35 Valid Combinations of Durability ‘kind’
DataReader requests:
VOLATILE
TRANSIENT
_LOCAL
TRANSIEN
T
PERSISTEN
T
DataWriter
offers:
VOLATILE
✔ incompatible incompatible incompatible
TRANSIENT_
LOCAL
✔✔incompatible incompatible
TRANSIENT
✔✔ ✔incompatible
PERSISTENT
✔✔ ✔✔

Chapter 6
6-116
6.5.6.3 Related QosPolicies
❏ HISTORY QosPolicy (Section 6.5.8)
❏ RELIABILITY QosPolicy (Section 6.5.17)
❏ DURABILITY SERVICE QosPolicy (Section 6.5.7)
6.5.6.4 Applicable Entities
❏ Topics (Section 5.1)
❏ DataWriters (Section 6.3)
❏ DataReaders (Section 7.3)
6.5.6.5 System Resource Considerations
Using this policy with a setting other than VOLATILE will cause RTI Data Distribution
Service to use CPU and network bandwidth to send old samples to matching, newly dis-
covered DataReaders. The actual amount of resources depends on the total size of data
that needs to be sent.
6.5.7 DURABILITY SERVICE QosPolicy
This QosPolicy is only used if the DURABILITY QosPolicy (Section 6.5.6) is PERSIS-
TENT or TRANSIENT and you are using RTI Persistence Service, which is included with
RTI Data Distribution Service Professional Edition and Elite Edition. RTI Persistence Service is
used to store and possibly forward the data sent by the DataWriter to DataReaders who
are created after the data was initially sent.
This QosPolicy configures certain parameters of RTI Persistence Service when it operates
on the behalf of the DataWriter, such as how much data to store. Specifically, this
QosPolicy configures the HISTORY and RESOURCE_LIMITS used by the fictitious
DataReader and DataWriter used by RTI Persistence Service.
Note however, that RTI Persistence Service itself may be configured to ignore these values
and instead use values from its own configuration file.
For more information, please see:
❏ Chapter 11: Mechanisms for Achieving Information Durability and Persistence
❏ Chapter 21: Introduction to RTI Persistence Service
❏ Chapter 22: Configuring RTI Persistence Service

6.5 DataWriter QosPolicies
6-117
6. Sending Data
This QosPolicy includes the members in Table 6.36. For default values, please refer to
the online documentation.
The service_cleanup_delay in this QosPolicy controls when RTI Persistence Service may
remove all information regarding a data-instances. Information on a data-instance is
maintained until all of the following conditions are met:
1. The instance has been explicitly disposed
(instance_state = NOT_ALIVE_DISPOSED).
2. While in the NOT_ALIVE_DISPOSED state, RTI Data Distribution Service detects
that there are no more 'live' DataWriters writing the instance. That is, all existing
writers either unregister the instance (call unregister) or lose their liveliness.
3. A time interval longer that DurabilityService QosPolicy’s
service_cleanup_delay has elapsed since the time that RTI Data Distribution Ser-
vice detected that the previous two conditions were met.
The service_cleanup_delay field is useful in the situation where your application dis-
poses an instance and it crashes before it has a chance to complete additional tasks
related to the disposition. Upon restart, your application may ask for initial data to
regain its state and the delay introduced by service_cleanup_delay will allow your
restarted application to receive the information about the disposed instance and com-
plete any interrupted tasks.
Although you can set the DURABILITY_SERVICE QosPolicy on a Top ic , this is only use-
ful as a means to initialize the DURABILITY_SERVICE QosPolicy of a DataWriter. A
Topic’s DURABILITY_SERVICE setting does not directly affect the operation of RTI
Data Distribution Service, see Section 5.1.3.
Table 6.36 DDS_DurabilityServiceQosPolicy
Type Field Name Description
DDS_Duration_t service_cleanup_delay
How long to keep all information
regarding an instance.
DDS_HistoryQosPolicyKind history_kind Settings to use for the HISTORY
QosPolicy (Section 6.5.8)
when
recouping durable data.
DDS_Long history_depth
DDS_Long
max_samples Settings to use for the
RESOURCE_LIMITS QosPol-
icy (Section 6.5.18)
when feeding
data to a late joiner.
max_instances
max_samples_per_instance

Chapter 6
6-118
6.5.7.1 Properties
This QosPolicy cannot be modified after the Entity has been enabled.
It does not apply to DataReaders, so there is no requirement for setting it compatibly on
the sending and receiving sides.
6.5.7.2 Related QosPolicies
❏ DURABILITY QosPolicy (Section 6.5.6)
❏ HISTORY QosPolicy (Section 6.5.8)
❏ RESOURCE_LIMITS QosPolicy (Section 6.5.18)
6.5.7.3 Applicable Entities
❏ Topics (Section 5.1)
❏ DataWriters (Section 6.3)
6.5.7.4 System Resource Considerations
Since this QosPolicy configures the HISTORY and RESOURCE_LIMITS used by the fic-
titious DataReader and DataWriter used by RTI Persistence Service, it does have some
impact on resource usage.
6.5.8 HISTORY QosPolicy
This QosPolicy configures the number of samples that RTI Data Distribution Service will
store locally for DataWriters and DataReaders. For keyed Top ic s, this QosPolicy applies on
a per instance basis, so that RTI Data Distribution Service will attempt to store the config-
ured value of samples for every instance (see Samples, Instances, and Keys (Section
2.2.2) for a discussion of keys and instances).
It includes the members seen in Table 6.37. For defaults and valid ranges, please refer to
the online documentation.
6.5 DataWriter QosPolicies
6-119
6. Sending Data
Table 6.37 DDS_HistoryQosPolicy
Type
Field
Name
Description
DDS_HistoryQos-
PolicyKind
kind
DDS_KEEP_LAST_HISTORY_QOS: keep the last depth number
of samples per instance.
DDS_KEEP_ALL_HISTORY_QOS: keep all samples.
a
DDS_Long depth
If kind = DDS_KEEP_LAST_HISTORY_QOS, this is how many
samples to keep per instance.
b
if kind = DDS_KEEP_ALL_HISTORY_QOS, this value is
ignored.
DDS_RefilterQos-
PolicyKind
refilter
Specifies how a DataWriter should handle previously written
samples for a new DataReader.
When a new DataReader matches a DataWriter, the DataWriter can
be configured to perform content-based filtering on previously
written samples stored in the DataWriter queue for the new
DataReader.
May be:
❏ DDS_NONE_REFILTER_QOS Do not filter existing samples
for a new DataReader. The DataReader will do the filtering.
❏ DDS_ALL_REFILTER_QOS Filter all existing samples for a
newly matched DataReader.
❏ DDS_ON_DEMAND_REFILTER_QOS Filter existing sam-
ples only when they are requested by the DataReader.
(An extension to the DDS standard.)
a. RTI Data Distribution Service will store up to the value of the max_samples_per_instance parameter of
the RESOURCE_LIMITS QosPolicy (Section 6.5.18).
b. depth must be <= max_samples_per_instance parameter of the RESOURCE_LIMITS QosPolicy (Section
6.5.18)

Chapter 6
6-120
The kind determines whether or not to save a configured number of samples or all sam-
ples. It can be set to either of the following:
❏ DDS_KEEP_LAST_HISTORY_QOS RTI Data Distribution Service attempts to keep the
latest values of the data-instance and discard the oldest ones when the limit as
set by the depth parameter is reached; new data will overwrite the oldest data in
the queue. Thus the queue acts like a circular buffer of length depth.
• For a DataWriter: RTI Data Distribution Service attempts to keep the most
recent depth samples of each instance (identified by a unique key) man-
aged by the DataWriter.
• For a DataReader: RTI Data Distribution Service attempts to keep the most
recent depth samples received for each instance (identified by a unique
key) until the application takes them via the DataReader's take() operation.
See Section 7.4.3 for a discussion of the difference between read() and
take().
❏ DDS_KEEP_ALL_HISTORY_QOS RTI Data Distribution Service attempts to keep all
of the samples of a Topic.
• For a DataWriter: RTI Data Distribution Service attempts to keep all samples
published by the DataWriter.
• For a DataReader: RTI Data Distribution Service attempts to keep all samples
received by the DataReader for a Topic (both keyed and non-keyed) until
the application takes them via the DataReader's take() operation. See
Section 7.4.3 for a discussion of the difference between read() and take().
• The value of the depth parameter is ignored.
The above descriptions say “attempts to keep” because the actual number of samples
kept is subject to the limitations imposed by the RESOURCE_LIMITS QosPolicy (Sec-
tion 6.5.18). All of the samples of all instances of a Topic share a single physical queue
that is allocated for a DataWriter or DataReader. The size of this queue is configured by
the RESOURCE_LIMITS QosPolicy. If there are many difference instances for a Topic, it
is possible that the physical queue may run out of space before the number of samples
reaches the depth for all instances.
In the KEEP_ALL case, RTI Data Distribution Service can only keep as many samples for
a Top ic (independent of instances) as the size of the allocated queue. RTI Data Distribu-
tion Service may or may not allocate more memory when the queue is filled, depending
on the settings in the RESOURCE_LIMITS QoSPolicy of the DataWriter or DataReader.
This QosPolicy interacts with the RELIABILITY QosPolicy (Section 6.5.17) by control-
ling whether or not DDS guarantees that ALL of the data sent is received or if only the

6.5 DataWriter QosPolicies
6-121
6. Sending Data
last N data values sent are guaranteed to be received (a reduced level of reliability using
the KEEP_LAST setting). However, the physical sizes of the send and receive queues are
not controlled by the History QosPolicy. The memory allocation for the queues is con-
trolled by the RESOURCE_LIMITS QosPolicy (Section 6.5.18). Also, the amount of data
that is sent to new DataReaders who have configured their DURABILITY QosPolicy (Sec-
tion 6.5.6) to receive previously published data is controlled by the History QosPolicy.
What happens when the physical queue is filled depends both on the setting for the
HISTORY QosPolicy as well as the RELIABILITY QosPolicy.
❏ DDS_KEEP_LAST_HISTORY_QOS
• If RELIABILITY is BEST_EFFORT: When the number of samples for an
instance in the queue reaches the value of depth, a new sample for the
instance will replace the oldest sample for the instance in the queue.
• If RELIABILITY is RELIABLE: When the number of samples for an
instance in the queue reaches the value of depth, a new sample for the
instance will replace the oldest sample for the instance in the queue—even
if the sample being overwritten has not been fully acknowledged as being
received by all reliable DataReaders. This implies that the discarded sample
may be lost by some reliable DataReaders. Thus, when using the
KEEP_LAST setting, strict reliability is not guaranteed. See Chapter 10:
Reliable Communications for a complete discussion on RTI Data Distribu-
tion Service’s reliable protocol.
❏ DDS_KEEP_ALL_HISTORY_QOS
• If RELIABILITY is BEST_EFFORT: If the number of samples for an
instance in the queue reaches the value of the RESOURCE_LIMITS
QosPolicy (Section 6.5.18)’s max_samples_per_instance field, a new sam-
ple for the instance will replace the oldest sample for the instance in the
queue (regardless of instance).
• If RELIABILITY is RELIABLE: When the number of samples for an
instance in the queue reaches the value of the RESOURCE_LIMITS
QosPolicy (Section 6.5.18)’s max_samples_per_instance field, then:
a) for a DataWriter—a new sample for the instance will replace the oldest
sample for the instance in the sending queue—only if the sample being
overwritten has been fully acknowledged as being received by all reli-
able DataReaders. If the oldest sample for the instance has not been fully
acknowledged, the write() operation trying to enter a new sample for
the instance into the sending queue will block (for the
max_blocking_time specified in the RELIABLE QosPolicy).

Chapter 6
6-122
b) for a DataReader—a new sample received by the DataReader will be dis-
carded. Because the DataReader will not acknowledge the discarded
sample, the DataWriter is forced to resend the sample. Hopefully, the
next time the sample is received, there is space for the instance in the
DataReader’s queue to store (and accept, thus acknowledge) the sample.
A sample will remain in the DataReader’s queue for one of two reasons.
The more common reason is that the user application has not removed
the sample using the DataReader’s take() method. Another reason is
that the sample has been received out of order and is not available to be
taken or read by the user application until all older samples have been
received.
Although you can set the HISTORY QosPolicy on Topic s, its value can only be used to
initialize the HISTORY QosPolicies of either a DataWriter or DataReader. It does not
directly affect the operation of RTI Data Distribution Service, see Section 5.1.3.
6.5.8.1 Example
To achieve strict reliability, you must (1) set the DataWriter’s and DataReader’s HISTORY
QosPolicy to KEEP_ALL, and (2) set the DataWriter’s and DataReader’s RELIABILITY
QosPolicy to RELIABLE.
See Chapter 10 for a complete discussion on RTI Data Distribution Service’s reliable pro-
tocol.
See Controlling Queue Depth with the History QosPolicy (Section 10.3.3).
6.5.8.2 Properties
This QosPolicy cannot be modified after the Entity has been enabled.
There is no requirement that the publishing and subscribing sides use compatible val-
ues.
6.5.8.3 Related QosPolicies
❏ BATCH QosPolicy (DDS Extension) (Section 6.5.1) Do not configure the
DataReader’s depth to be shallower than the DataWriter's maximum batch size
(batch_max_data_size). Because batches are acknowledged as a group, a
DataReader that cannot process an entire batch will lose the remaining samples in
it.
❏ RELIABILITY QosPolicy (Section 6.5.17)
❏ RESOURCE_LIMITS QosPolicy (Section 6.5.18)

6.5 DataWriter QosPolicies
6-123
6. Sending Data
6.5.8.4 Applicable Entities
❏ Topics (Section 5.1)
❏ DataWriters (Section 6.3)
❏ DataReaders (Section 7.3)
6.5.8.5 System Resource Considerations
While this QosPolicy does not directly affect the system resources used by RTI Data Dis-
tribution Service, the RESOURCE_LIMITS QosPolicy (Section 6.5.18) that must be used in
conjunction with the HISTORY QosPolicy (Section 6.5.8) will affect the amount of mem-
ory that RTI Data Distribution Service will allocate for a DataWriter or DataReader.
6.5.9 LATENCYBUDGET QoS Policy
This QosPolicy can be used by a DDS implementation to change how it processes and
sends data that has low latency requirements. The DDS specification does not mandate
whether or how this parameter is used. RTI Data Distribution Service uses it to prioritize
the sending of asynchronously published data; see ASYNCHRONOUS_PUBLISHER
QosPolicy (DDS Extension) (Section 6.4.1).
This QosPolicy also applies to To pic s. The To pi c’s setting for the policy is ignored unless
you explicitly make the DataWriter use it.
It contains the single member listed in Table 6.38.
6.5.9.1 Applicable Entities
❏ Topics (Section 5.1)
❏ DataWriters (Section 6.3)
❏ DataReaders (Section 7.3)
Table 6.38 DDS_LatencyBudgetQosPolicy
Type Field Name Description
DDS_Duration_t duration
Provides a hint as to the maximum acceptable delay
from the time the data is written to the time it is
received by the subscribing applications.

Chapter 6
6-124
6.5.10 LIFESPAN QoS Policy
The purpose of this QoS is to avoid delivering stale data to the application. Each data
sample written by a DataWriter has an associated expiration time, beyond which the
data should not be delivered to any application. Once the sample expires, the data will
be removed from the DataReader caches, as well as from the transient and persistent
information caches.
The middleware attaches timestamps to all data sent and received. The expiration time
of each sample is computed by adding the duration specified by this QoS to the destina-
tion timestamp. To avoid inconsistencies, if you have multiple DataWriters of the same
instance, they should all use the same value for this QoS.
When you specify a finite Lifespan for your data, RTI Data Distribution Service will com-
pare the current time with those timestamps and drop data when your specified
Lifespan expires.
The Lifespan QosPolicy can be used to control how much data is stored by RTI Data Dis-
tribution Service. Even if it is configured to store "all" of the data sent or received for a
topic (see the HISTORY QosPolicy (Section 6.5.8)), the total amount of data it stores may
be limited by the Lifespan QosPolicy.
You may also use the Lifespan QosPolicy to ensure that applications do not receive or
act on data, commands or messages that are too old and have "expired.”
It includes the single member listed in Table 6.39. For default and valid range, please
refer to the online documentation.
Although you can set the LIFESPAN QosPolicy on Topi cs, its value can only be used to
initialize the LIFESPAN QosPolicies of DataWriters. The Topic’s setting for this QosPol-
icy does not directly affect the operation of RTI Data Distribution Service, see Setting
Topic QosPolicies (Section 5.1.3).
6.5.10.1 Properties
This QoS policy can be modified after the entity is enabled.
It does not apply to DataReaders, so there is no requirement that the publishing and sub-
scribing sides use compatible values.
Table 6.39 DDS_LifespanQosPolicy
Type Field Name Description
DDS_Duration_t duration Maximum duration for the data's validity.

6.5 DataWriter QosPolicies
6-125
6. Sending Data
6.5.10.2 Related QoS Policies
❏ BATCH QosPolicy (DDS Extension) (Section 6.5.1) Be careful when configuring
a DataWriter with a Lifespan duration shorter than the batch flush period
(batch_flush_delay). If the batch does not fill up before the flush period elapses,
the short duration will cause the samples to be lost without being sent.
❏ DURABILITY QosPolicy (Section 6.5.6)
6.5.10.3 Applicable Entities
❏ Topics (Section 5.1)
❏ DataWriters (Section 6.3)
6.5.10.4 System Resource Considerations
The use of this policy does not significantly impact the use of resources.
6.5.11 LIVELINESS QosPolicy
The LIVELINESS QosPolicy specifies how RTI Data Distribution Service determines
whether a DataWriter is “alive.” A DataWriter’s liveliness is used in combination with
the OWNERSHIP QosPolicy (Section 6.5.13) to maintain ownership of an instance (note
that the DEADLINE QosPolicy (Section 6.5.4) is also used to change ownership when a
DataWriter is still alive). That is, for a DataWriter to own an instance, the DataWriter must
still be alive as well as honoring its DEADLINE contract.
It includes the members in Table 6.40. For defaults and valid ranges, please refer to the
online documentation.
Setting a DataWriter’s kind of LIVELINESS specifies the mechanism that will be used to
assert liveliness for the DataWriter. The DataWriter’s lease_duration then specifies the
maximum period at which packets that indicate that the DataWriter is still alive are sent
to matching DataReaders.

Chapter 6
6-126
The various mechanisms are:
❏ DDS_AUTOMATIC_LIVELINESS_QOS — The DomainParticipant is responsible for
automatically sending packets to indicate that the DataWriter is alive; this will be
done at least as often as required by the lease_duration. This setting is appropri-
ate when the primary failure mode is that the publishing application itself dies.
It does not cover the case in which the application is still alive but in an errone-
ous state–allowing the DomainParticipant to continue to assert liveliness for the
DataWriter but preventing threads from calling write() on the DataWriter.
As long as the internal threads spawned by RTI Data Distribution Service for a
DomainParticipant are running, then the liveliness of the DataWriter will be
asserted regardless of the state of the rest of the application.
This setting is certainly the most convenient, if the least accurate, method of
asserting liveliness for a DataWriter.
❏ DDS_MANUAL_BY_PARTICIPANT_LIVELINESS_QOS — RTI Data Distribution Service
will assume that as long as the user application has asserted the liveliness of at
least one DataWriter belonging to the same DomainParticipant or the liveliness of
the DomainParticipant itself, then this DataWriter is also alive.
Table 6.40 DDS_LivelinessQosPolicy
Type Field Name Description
DDS_Liveliness
QosPolicyKind
kind
DDS_AUTOMATIC_LIVELINESS_QOS:
RTI Data Distribution Service will automatically assert live-
liness for the DataWriter at least as often as the
lease_duration.
DDS_MANUAL_BY_PARTICIPANT_LIVELINESS_QOS:
The DataWriter is assumed to be alive if any Entity within the
same DomainParticipant has asserted its liveliness.
DDS_MANUAL_BY_TOPIC_LIVELINESS_QOS:
Your application must explicitly assert the liveliness of the
DataWriter within the lease_duration.
DDS_Duration_t lease_duration
The timeout by which liveliness must be asserted for the
DataWriter or else the DataWriter will be considered “inactive
or not alive.
Additionally, for DataReaders, the
lease_duration also speci-
fies the maximum period at which
RTI Data Distribution
Service
will check to see if the matching DataWriter is still
alive.

6.5 DataWriter QosPolicies
6-127
6. Sending Data
This setting allows the user code to control the assertion of liveliness for an entire
group of DataWriters with a single operation on any of the DataWriters or their
DomainParticipant. Its a good balance between control and convenience.
❏ DDS_MANUAL_BY_TOPIC_LIVELINESS_QOS — The DataWriter is considered alive
only if the user application has explicitly called operations that assert the liveli-
ness for that particular DataWriter.
This setting forces the user application to assert the liveliness for a DataWriter
which gives the user application great control over when other applications can
consider the DataWriter to be inactive, but at the cost of convenience.
With the MANUAL_BY_[TOPIC,PARTICIPANT] settings, user application code can
assert the liveliness of DataWriters either explicitly by calling the assert_liveliness()
operation on the DataWriter (as well as the DomainParticipant for the
MANUAL_BY_PARTICIPANT setting) or implicitly by calling write() on the
DataWriter. If the application does not use either of the methods mentioned at least once
every lease_duration, then the subscribing application may assume that the DataWriter
is no longer alive. Sending data MANUAL_BY_TOPIC will cause an assert message to
be sent between the DataWriter and its matched DataReaders.
Publishing applications will monitor their DataWriters to make sure that they are honor-
ing their LIVELINESS QosPolicy by asserting their liveliness at least at the period set by
the lease_duration. If RTI Data Distribution Service finds that a DataWriter has failed to
have its liveliness asserted by its lease_duration, an internal thread will modify the
DataWriter’s DDS_LIVELINESS_LOST_STATUS and trigger its on_liveliness_lost()
DataWriterListener callback if a listener exists, see Listeners (Section 4.4).
Setting the DataReader’s kind of LIVELINESS requests a specific mechanism for the
publishing application to maintain the liveliness of DataWriters. The subscribing appli-
cation may want to know that the publishing application is explicitly asserting the live-
liness of the matching DataWriter rather than inferring its liveliness through the
liveliness of its DomainParticipant or its sibling DataWriters.
The DataReader’s lease_duration specifies the maximum period at which matching
DataWriters must have their liveliness asserted. In addition, in the subscribing applica-
tion RTI Data Distribution Service uses an internal thread that wakes up at the period set
by the DataReader’s lease_duration to see if the DataWriter’s lease_duration has been
violated.
When a matching
DataWriter is determined to be dead (inactive), RTI Data Distribution
Service will modify the DDS_LIVELINESS_CHANGED_STATUS of each matching
DataReader and trigger that DataReader’s on_liveliness_changed() DataReaderListener
callback (if a listener exists).

Chapter 6
6-128
Although you can set the LIVELINESS QosPolicy on Top ic s, its value can only be used to
initialize the LIVELINESS QosPolicies of either a DataWriter or DataReader. It does not
directly affect the operation of RTI Data Distribution Service, see Section 5.1.3.
For more information on Liveliness, see Maintaining DataWriter Liveliness for kinds
AUTOMATIC and MANUAL_BY_PARTICIPANT (Section 12.3.1.2).
6.5.11.1 Example
You can use LIVELINESS QosPolicy during system integration to ensure that applica-
tions have been coded to meet design specifications. You can also use it during run time
to detect when systems are performing outside of design specifications. Receiving
applications can take appropriate actions in response to disconnected DataWriters.
The LIVELINESS QosPolicy can be used to manage fail-over when the OWNERSHIP
QosPolicy (Section 6.5.13) is set to EXCLUSIVE. This implies that the DataReader will
only receive data from the highest strength DataWriter that is alive (active). When that
DataWriter’s liveliness expires, then RTI Data Distribution Service will start delivering
data from the next highest strength DataWriter that is still alive.
6.5.11.2 Properties
This QosPolicy cannot be modified after the Entity has been enabled.
The DataWriter and DataReader must use compatible settings for this QosPolicy. To be
compatible, both of the following conditions must be true:
1. The DataWriter and DataReader must use one of the valid combinations shown in
Table 6.41.
2. DataWriter’s lease_duration <= DataReader’s lease_duration.
If this QosPolicy is found to be incompatible, the
ON_OFFERED_INCOMPATIBLE_QOS and
ON_REQUESTED_INCOMPATIBLE_QOS statuses will be modified and the corre-
sponding Listeners called for the DataWriter and DataReader respectively.
6.5.11.3 Related QosPolicies
❏ DEADLINE QosPolicy (Section 6.5.4)
❏ OWNERSHIP QosPolicy (Section 6.5.13)
❏ OWNERSHIP_STRENGTH QosPolicy (Section 6.5.14)

6.5 DataWriter QosPolicies
6-129
6. Sending Data
6.5.11.4 Applicable Entities
❏ Topics (Section 5.1)
❏ DataWriters (Section 6.3)
❏ DataReaders (Section 7.3)
6.5.11.5 System Resource Considerations
An internal thread in RTI Data Distribution Service will wake up periodically to check the
liveliness of all the DataWriters. This happens both in the application that contains the
DataWriters at the lease_duration set on the DataWriters as well as the applications that
contain the DataReaders at the lease_duration set on the DataReaders. Therefore, as
lease_duration becomes smaller, more CPU will be used to wake up threads and per-
form checks. A short lease_duration set on DataWriters may also use more network
bandwidth because liveliness packets are being sent at a higher rate—this is especially
true when LIVELINESS kind is set to AUTOMATIC.
6.5.12 MULTI_CHANNEL QosPolicy (DDS Extension)
This QosPolicy is used to partition the data published by a DataWriter across multiple
channels. A channel is defined by a filter expression and a sequence of multicast locators.
By using this QoS, a DataWriter can be configured to send data to different multicast
groups based on the content of the data. Using syntax similar to those used in Content-
Based Filters, you can associate different multicast addresses with filter expressions that
operate on the values of the fields within the data. When your application’s code calls
write(), data is sent to any multicast address for which the data passes the filter.
Table 6.41 Valid Combinations of Liveliness ‘kind’
DataReader requests:
MANUAL_BY_
TOPIC
MANUAL_BY_
PARTICIPANT
AUTOMATIC
DataWriter
offers:
MANUAL_BY_
TOPIC
✔✔✔
MANUAL_BY_
PARTICIPANT
incompatible ✔✔
AUTOMATIC
incompatible incompatible ✔

Chapter 6
6-130
See Chapter 16 for complete documentation on multi-channel DataWriters.
Notes:
❏ Durable writer history is not supported for multi-channel DataWriters (see
Chapter 16); an error is reported if a multi-channel DataWriter tries to configure
Durable Writer History.
❏ Asynchronous publishing (see Section 6.4.1) is not supported for multi-channel
DataWriters; an error is returned if a multi-channel DataWriter is configured for
asynchronous publishing.
This policy includes the members presented in Table 6.42, Table 6.43, and Table 6.44. For
defaults and valid ranges, please refer to the online documentation.
The format of the filter_expression should correspond to one of the following filter
classes:
❏ DDS_SQLFILTER_NAME (see SQL Filter Expression Notation (Section 5.4.6))
❏ DDS_STRINGMATCHFILTER_NAME (see STRINGMATCH Filter Expression
Notation (Section 5.4.7)
A DataReader can use the ContentFilteredTopic API (see Using a ContentFilteredTopic
(Section 5.4.5)) to subscribe to a subset of the channels used by a DataWriter.
6.5.12.1 Example
See Chapter 16: Multi-channel DataWriters.
Table 6.42 DDS_MultiChannelQosPolicy
Type
Field
Name
Description
DDS_ChannelSettingsSeq channels
A sequence of channel settings used to configure the
channels’ properties. If the length of the sequence is
zero, the QosPolicy will be ignored. See Table 6.43.
char * filter_name
Name of the filter class used to describe the filter
expressions. The following values are supported:
❏ DDS_SQLFILTER_NAME
a
(see Section 5.4.6)
❏ DDS_STRINGMATCHFILTER_NAME
a
(see
Section 5.4.7)
a. In Java and C#, you can access the names of the builtin filters by using
DomainParticipant.SQLFILTER_NAME and DomainParticipant.STRINGMATCHFILTER_NAME.
6.5 DataWriter QosPolicies
6-131
6. Sending Data
6.5.12.2 Properties
This QosPolicy cannot be modified after the DataWriter is created.
It does not apply to DataReaders, so there is no requirement that the publishing and sub-
scribing sides use compatible values.
6.5.12.3 Related Qos Policies
❏ DOMAIN_PARTICIPANT_RESOURCE_LIMITS QosPolicy (DDS Extension)
(Section 8.5.4)
Table 6.43 DDS_ChannelSettings_t
Type Field Name Description
DDS_MulticastSettingsSeq multicast_settings
A sequence of multicast settings used to con-
figure the multicast addresses associated with
a channel. The sequence cannot be empty.
The maximum number of multicast locators in
a channel is limited to four. (A locator is
defined by a transport alias, a multicast
address and a port.) See Table 6.44.
char * filter_expression
A logical expression used to determine the
data that will be published in the channel.
This string cannot be NULL.
An empty string
always evaluates to TRUE.
See SQL Filter Expression Notation (Section
5.4.6) and STRINGMATCH Filter Expression
Notation (Section 5.4.7) for expression syntax.
Table 6.44 DDS_MulticastSettings
Type Field Name Description
DDS_StringSeq transports
A sequence of transport aliases that specifies
which transport should be used to publish
multicast messages for this channel.
char * receive_address
A multicast group address on which
DataReaders subscribing to this channel will
receive data.
DDS_Long receive_port
The multicast port on which DataReaders sub-
scribing to this channel will receive data.

Chapter 6
6-132
6.5.12.4 Applicable Entities
❏ DataWriters (Section 6.3)
6.5.12.5 System Resource Considerations
The following fields in the DOMAIN_PARTICIPANT_RESOURCE_LIMITS QosPolicy
(DDS Extension) (Section 8.5.4) configure the resources associated with the channels
stored in the MULTI_CHANNEL QosPolicy:
❏ channel_seq_max_length
❏ channel_filter_expression_max_length
For information about partitioning topic data across multiple channels, please refer to
Chapter 16: Multi-channel DataWriters.
6.5.13 OWNERSHIP QosPolicy
The OWNERSHIP QosPolicy specifies whether a DataReader receive data for an instance
of a Topic sent by multiple DataWriters.
For non-keyed Topic s, there is only one instance of the Top ic .
This policy includes the single member shown in Table 6.45.
The kind of OWNERSHIP can be set to one of two values:
❏ SHARED Ownership
When OWNERSHIP is SHARED, and multiple DataWriters for the Topic pub-
lishes the value of the same instance, all the updates are delivered to subscribing
DataReaders. So in effect, there is no “owner;” no single DataWriter is responsible
for updating the value of an instance. The subscribing application will receive
modifications from all DataWriters.
Table 6.45 DDS_OwnershipQosPolicy
Type Field Name Description
DDS_OwnershipQosPolicyKind kind
DDS_SHARED_OWNERSHIP_QOS or
DDS_EXCLUSIVE_OWNERSHIP_QOS

6.5 DataWriter QosPolicies
6-133
6. Sending Data
❏ EXCLUSIVE Ownership
When OWNERSHIP is EXCLUSIVE, each instance can only be owned by one
DataWriter at a time. This means that a single DataWriter is identified as the
exclusive owner whose updates are allowed to modify the value of the instance
for matching DataWriters. Other DataWriters may submit modifications for the
instance, but only those made by the current owner are passed on to the
DataReaders. If a non-owner DataWriter modifies an instance, no error or notifica-
tion is made; the modification is simply ignored. The owner of the instance can
change dynamically.
Note for non-keyed Topi cs , EXCLUSIVE ownership implies that DataReaders will
pay attention to only one DataWriter at a time because there is only a single
instance. For keyed Topics , DataReaders may actually receive data from multiple
DataWriters when different DataWriters own different instances of the Topic.
This QosPolicy is often used to help users build systems that have redundant elements
to safeguard against component or application failures. When systems have active and
hot standby components, the Ownership QosPolicy can be used to ensure that data
from standby applications are only delivered in the case of the failure of the primary.
The Ownership QosPolicy can also be used to create data channels or topics that are
designed to be taken over by external applications for testing or maintenance purposes.
Although you can set the OWNERSHIP QosPolicy on To pi cs , its value can only be used
to initialize the OWNERSHIP QosPolicies of either a DataWriter or DataReader. It does
not directly affect the operation of RTI Data Distribution Service, see Section 5.1.3.
6.5.13.1 How RTI Data Distribution Service Selects which DataWriter is the Exclusive Owner
When OWNERSHIP is EXCLUSIVE, the owner of an instance at any given time is the
DataWriter with the highest OWNERSHIP_STRENGTH QosPolicy (Section 6.5.14) that
is “alive” as defined by the LIVELINESS QosPolicy (Section 6.5.11)) and has not violated
the DEADLINE QosPolicy (Section 6.5.4) of the DataReader. OWNERSHIP_STRENGTH
is simply an integer set by the DataWriter.
As mentioned before, if the Topic’s data type is keyed (see Section 2.2.2) then EXCLU-
SIVE ownership is determined on a per-instance basis. That is, the DataWriter owner of
each instance is considered separately. A DataReader can receive values written by a
lower strength DataWriter as long as those values are for instances that are not being
written by a higher-strength DataWriter.
If there are multiple DataWriters with the same OWNERSHIP_STRENGTH writing to
the same instance, RTI Data Distribution Service resolves the tie by choosing the
DataWriter with the smallest GUID (Globally Unique Identifier, see Section 12.1.1.). This
means that different DataReaders (in different applications) of the same Top ic will all

Chapter 6
6-134
choose the same DataWriter as the owner when there are multiple DataWriters with the
same strength.
The owner of an instance can change when:
❏ A DataWriter with a higher OWNERSHIP_STRENGTH publishes a value for the
instance.
❏ The OWNERSHIP_STRENGTH of the owning DataWriter is dynamically
changed to be less than the strength of an existing DataWriter of the instance.
❏ The owning DataWriter stops asserting its LIVELINESS (the DataWriter dies).
❏ The owning DataWriter violates the DEADLINE QosPolicy by not updating the
value of the instance within the period set by the DEADLINE.
Note however, the change of ownership is not synchronous across different DataReaders
in different participants. That is, DataReaders in different applications may not deter-
mine that the ownership of an instance has changed at exactly the same time.
6.5.13.2 Example
OWNERSHIP is really a property that is shared between DataReaders and DataWriters of
a To pic . However, in a system, some To pi cs will be exclusively owned and others will be
shared. System requirements will determine which are which.
An example of a Topic that may be shared is one that is used by applications to publish
alarm messages. If the application detects an anomalous condition, it will use a
DataWriter to write a Topic “Alarm.” Another application that records alarms into a sys-
tem log file will have a DataReader that subscribes to “Alarm.” In this example, any
number of applications can publish the “Alarm” message. There is no concept that only
one application at a time is allowed to publish the “Alarm” message, so in this case, the
OWNERSHIP of the DataWriters and DataReaders should be set to SHARED.
In a different part of the system, EXCLUSIVE OWNERSHIP may be used to implement
redundancy in support of fault tolerance. Say, the distributed system controls a traffic
system. It monitors traffic and changes the information posted on signs, the operation of
metering lights, and the timing of traffic lights. This system must be tolerant to failure of
any part of the system including the application that actually issues commands to
change the lights at a particular intersection.
One way to implement fault tolerance is to create the system redundantly both in hard-
ware and software. So if a piece of the running system fails, a backup can take over. In
systems where failover from the primary to backup system must be seamless and trans-
parent, the actual mechanics of failover must be fast, and the redundant component
must immediately pickup where the failed component left off. For the network connec-

6.5 DataWriter QosPolicies
6-135
6. Sending Data
tions of the component, RTI Data Distribution Service can provided redundant DataWriter
and DataReaders.
In this case, you would not want the DataReaders to receive redundant messages from
the redundant DataWriters. Instead you will want the DataReaders to only receive mes-
sages from the primary application and only from a backup application when a failure
occurs. To continue our example, if we have redundant applications that all try to con-
trol the lights at an intersection, we would want the DataReaders on the light to receive
messages only from the primary application. To do so, we should configure the
DataWriters and DataReaders to have EXCLUSIVE OWNERSHIP and set the
OWNERSHIP_STRENGTH differently on different redundant applications to distin-
guish between primary and backup systems.
6.5.13.3 Properties
This QosPolicy cannot be modified after the Entity is enabled.
It must be set to the same kind on both the publishing and subscribing sides. If a
DataWriter and DataReader of the same topic are found to have different kinds set for the
OWNERSHIP QoS, the ON_OFFERED_INCOMPATIBLE_QOS and
ON_REQUESTED_INCOMPATIBLE_QOS statuses will be modified and the corre-
sponding Listeners called for the DataWriter and DataReader respectively.
6.5.13.4 Related QosPolicies
❏ DEADLINE QosPolicy (Section 6.5.4)
❏ LIVELINESS QosPolicy (Section 6.5.11)
❏ OWNERSHIP_STRENGTH QosPolicy (Section 6.5.14)
6.5.13.5 Applicable Entities
❏ Topics (Section 5.1)
❏ DataWriters (Section 6.3)
❏ DataReaders (Section 7.3)
6.5.13.6 System Resource Considerations
This QosPolicy does not significantly impact the use of system resources.

Chapter 6
6-136
6.5.14 OWNERSHIP_STRENGTH QosPolicy
The OWNERSHIP_STRENGTH QosPolicy is used to rank DataWriters of the same
instance of a Topic, so that RTI Data Distribution Service can decide which DataWriter will
have ownership of the instance when the OWNERSHIP QosPolicy (Section 6.5.13) is set
to EXCLUSIVE.
It includes the member in Table 6.46. For the default and valid range, please refer to the
online documentation.
This QosPolicy only applies to DataWriters when EXCLUSIVE OWNERSHIP is used.
The strength is simply an integer value, and the DataWriter with the largest value is the
owner. A deterministic method is used to decide which DataWriter is the owner when
there are multiple DataWriters that have equal strengths. See Section 6.5.13.1 for more
details.
6.5.14.1 Example
Suppose there are two DataWriters sending samples of the same Topic instance, one as
the main DataWriter, and the other as a backup. If you want to make sure the DataReader
always receive from the main one whenever possible, then set the main DataWriter to
use a higher ownership_strength value than the one used by the backup DataWriter.
6.5.14.2 Properties
This QosPolicy can be changed at any time.
It does not apply to DataReaders, so there is no requirement that the publishing and sub-
scribing sides use compatible values.
6.5.14.3 Related QosPolicies
❏ OWNERSHIP QosPolicy (Section 6.5.13)
6.5.14.4 Applicable Entities
❏ DataWriters (Section 6.3)
6.5.14.5 System Resource Considerations
The use of this policy does not significantly impact the use of resources.
Table 6.46 DDS_OwnershipStrengthQosPolicy
Type
Field
Name
Description
DDS_Long value The strength value used to arbitrate among multiple DataWriters.

6.5 DataWriter QosPolicies
6-137
6. Sending Data
6.5.15 PROPERTY QosPolicy (DDS Extension)
The PROPERTY QosPolicy stores name/value (string) pairs that can be used to config-
ure certain parameters of RTI Data Distribution Service that are not exposed through for-
mal QoS policies.
It can also be used to store and propagate application-specific name/value pairs that
can be retrieved by user code during discovery. This is similar to the USER_DATA
QosPolicy, except this policy uses (name, value) pairs, and you can select whether or not
a particular pair should be propagated (included in the builtin topic).
It includes the member in Table 6.47.
The Property QoS stores name/value pairs for a DDS Entity. Both the name and value
are strings. Certain configurable parameters for DDS Entities that do not have a formal
DDS QoS definition may be configured via this QoS by using a pre-defined name and
the desired setting in string form.
You can manipulate the sequence of properties (name, value pairs) with the standard
methods available for sequences. You can also use the helper class, DDSProperty-
QosPolicyHelper, which provides another way to work with a PropertyQosPolicy
object.
The PropertyQosPolicy may be used to configure:
❏ Durable writer history (see Section 11.3.2)
❏ Durable reader state (see Section 11.4.2)
❏ Builtin and extension Transport Plugins (see Section 13.6, Section 20.2,
Section 29.2).
❏ Automatic registration of builtin types (see Registering Built-in Types (Section
3.2.1))
❏ Clock Selection (Section 8.6)
In addition, you can add your own name/value pairs to the Property QoS of a DDS
Entity. You may also use this QosPolicy to direct RTI Data Distribution Service to propa-
Table 6.47 DDS_PropertyQosPolicy
Type
Field
Name
Description
DDS_PropertySeq value
A sequence of: (name, value) pairs and booleans that
indicate whether the pair should be propagated
(included in the entity’s builtin topic upon discovery).

Chapter 6
6-138
gate these name/value pairs with the discovery information for the Entity. Applications
that discover the Entity can then access the user-specific name/value pairs in the dis-
covery information of the remote Entity. This allows you to add meta-information about
an Entity for application-specific use, for example, authentication/authorization certifi-
cates (which can also be done using the User or Group Data QoS).
Reasons for using the PropertyQosPolicy include:
❏ Some features can only be configured through the PropertyQosPolicy, not
through other QoS or API.s For example, Durable Reader State, Durable Writer
History, Builtin Types, Monotonic Clock.
❏ Alternative way to configure builtin transports settings. For example, to use non-
default values for the builtin transports without using the PropertyQosPolicy,
you would have to create a DomainParticipant disabled, change the builtin trans-
port property settings, then enable the DomainParticipant. Using the Property-
QosPolicy to configure builtin transport settings will save you the work of
enabling and disabling the DomainParticipant. Also, transport settings are not a
QoS and therefore cannot be configured through an XML file. By configuring
builtin transport settings through the PropertyQosPolicy instead, XML files can
be used.
• Note: When using the Java or .NET APIs, transport configuration must
take place through the PropertyQosPolicy (not through the transport prop-
erty structures).
❏ Alternative way to support multiple instances of builtin transports (without
using Transport API).
❏ Alternative way to dynamically load extension transports (such as RTI Secure
WAN Transport
1
or RTI TCP Transport
2
) or user-created transport plugins in C/
C++ language bindings. If the extension or user-created transport plugin is
installed using the transport API instead, the library that extra transport library/
code will need to be linked into your application and may require recompilation.
❏ Allows full pluggable transport configuration for non-C/C++ language bindings
(Java, C++/CLI, C#, etc.) The pluggable transport API is not available in those
languages. Without using PropertyQosPolicy, you cannot use extension trans-
ports (such as RTI Secure WAN Transport) and you cannot create your own cus-
tom transport.
1. RTI Secure WAN Transport is an optional packages available for separate purchase.
2. RTI TCP Transport is included with your RTI Data Distribution Service distribution but is not a built-in
transport and therefore not enabled by default.

6.5 DataWriter QosPolicies
6-139
6. Sending Data
The PropertyQosPolicyHelper operations are described in Table 6.48. For more informa-
tion, see the online documentation.
6.5.15.1 Properties
This QosPolicy can be changed at any time.
There is no requirement that the publishing and subscribing sides use compatible val-
ues.
6.5.15.2 Related QosPolicies
❏ DOMAIN_PARTICIPANT_RESOURCE_LIMITS QosPolicy (DDS Extension)
(Section 8.5.4)
6.5.15.3 Applicable Entities
❏ DataWriters (Section 6.3)
❏ DataReaders (Section 7.3)
❏ DomainParticipants (Section 8.3)
6.5.15.4 System Resource Considerations
The DOMAIN_PARTICIPANT_RESOURCE_LIMITS QosPolicy (DDS Extension) (Sec-
tion 8.5.4) contains several fields for configuring the resources associated with the prop-
erties stored in this QosPolicy.
Table 6.48 PropertyQoSPolicyHelper Operations
Operation Description
get_number_of_properties Gets the number of properties in the input policy.
assert_property
Asserts the property identified by name in the input policy. (Either
adds it, or replaces an existing one.)
add_property Adds a new property to the input policy.
lookup_property Searches for a property in the input policy given its name.
remove_property Removes a property from the input policy.
get_properties Retrieves a list of properties whose names match the input prefix.

Chapter 6
6-140
6.5.16 PUBLISH_MODE QosPolicy (DDS Extension)
This QosPolicy determines the DataWriter’s publishing mode, either asynchronous or
synchronous.
The publishing mode controls whether data is written synchronously—in the context of
the user thread when calling write(), or asynchronously—in the context of a separate
thread internal to RTI Data Distribution Service.
Note: Asynchronous DataWriters do not perform sender-side filtering. Any filtering,
such as time-based or content-based filtering, takes place on the DataReader side.
Each Publisher spawns a single asynchronous publishing thread (set in its
ASYNCHRONOUS_PUBLISHER QosPolicy (DDS Extension) (Section 6.4.1)) to serve all
its asynchronous DataWriters.
When data is written asynchronously, a FlowController (Section 6.6), identified by
flow_controller_name, can be used to shape the network traffic. The flow controller's
properties determine when the asynchronous publishing thread is allowed to send data
and how much.
The fastest way for RTI Data Distribution Service to send data is for the user thread to
execute the middleware code that actually sends the data itself. However, there are
times when user applications may need or want an internal middleware thread to send
the data instead. For instance, for sending large data reliably, an asynchronous thread
must be used (see ASYNCHRONOUS_PUBLISHER QosPolicy (DDS Extension) (Sec-
tion 6.4.1)).
In addition, this QosPolicy can select a FlowController to shape the data flow sent by a
DataWriter to DataReaders. Shaping a data flow usually means limiting the maximum
data rates with which the middleware will send data for a DataWriter. The flow control-
ler will buffer data sent faster than the maximum rate by the DataWriter, and then only
send the excess data when the user send rate drops below the maximum rate.
This QosPolicy includes the members in Table 6.49. For the defaults, please refer to the
online documentation.
The maximum number of samples that will be coalesced depends on
NDDS_Transport_Property_t::gather_send_buffer_count_max (each sample requires
at least 2-4 gather-send buffers). Performance can be improved by increasing
NDDS_Transport_Property_t::gather_send_buffer_count_max. Note that the maxi-
mum value is operating system dependent.
RTI Data Distribution Service queues samples until they can be sent by the asynchronous
publishing thread (as determined by the corresponding FlowController).

6.5 DataWriter QosPolicies
6-141
6. Sending Data
The number of samples that will be queued is determined by the HISTORY QosPolicy
(Section 6.5.8): when using KEEP_LAST, the most recent depth samples are kept in the
queue.
Once unsent samples are removed from the queue, they are no longer available to the
asynchronous publishing thread and will therefore never be sent.
Unless flow_controller_name points to one of the built-in FlowControllers, finalizing
the DataWriterQos will also free the string pointed to by flow_controller_name. There-
fore, you should use DDS_String_dup() before passing the string to
flow_controller_name, or reset flow_controller_name to NULL before the destructing
/finalizing the QoS.
Advantages of Asynchronous Publishing:
Asynchronous publishing may increase latency, but offers the following advantages:
❏ The write() call does not make any network calls and is therefore faster and more
deterministic. This becomes important when the user thread is executing time-
critical code.
❏ When data is written in bursts or when sending large data types as multiple
fragments, a flow controller can throttle the send rate of the asynchronous pub-
lishing thread to avoid flooding the network.
❏ Asynchronously written samples for the same destination will be coalesced into
a single network packet which reduces bandwidth consumption.
Table 6.49 DDS_PublishModeQosPolicy
Type Field Name Description
DDS_PublishMode
QosPolicyKind
kind
Either:
DDS_ASYNCHRONOUS_PUBLISHER_MODE_QOS
a
DDS_SYNCHRONOUS_PUBLISHER_MODE_QOS
char*
flow_controller_
name
Name of the associated flow controller.
There are three built-in FlowControllers:
DDS_DEFAULT_FLOW_CONTROLLER_NAME
DDS_FIXED_RATE_FLOW_CONTROLLER_NAME
DDS_ON_DEMAND_FLOW_CONTROLLER_NAME
You may also create your own FlowControllers.
See Flow Controllers (DDS Extension) (Section 6.6).
a. See Note on page 6-93.

Chapter 6
6-142
6.5.16.1 Properties
This QosPolicy cannot be modified after the Publisher is created.
Since it is only for DataWriters, there are no compatibility restrictions for how it is set on
the publishing and subscribing sides.
6.5.16.2 Related QosPolicies
❏ ASYNCHRONOUS_PUBLISHER QosPolicy (DDS Extension) (Section 6.4.1)
❏ HISTORY QosPolicy (Section 6.5.8)
6.5.16.3 Applicable Entities
❏ DataWriters (Section 6.3)
6.5.16.4 System Resource Considerations
See Configuring Resource Limits for Asynchronous DataWriters (Section 6.5.18.1).
System resource usage depends on the settings in the corresponding FlowController
(see Section 6.6).
6.5.17 RELIABILITY QosPolicy
This RELIABILITY QosPolicy determines whether or not data published by a
DataWriter will be reliably delivered by RTI Data Distribution Service to matching
DataReaders. The reliability protocol used by RTI Data Distribution Service is discussed in
Chapter 10: Reliable Communications.
The reliability of a connection between a DataWriter and DataReader is entirely user con-
figurable. It can be done on a per DataWriter/DataReader connection. A connection may
be configured to be "best effort" which means that RTI Data Distribution Service will not
use any resources to monitor or guarantee that the data sent by a DataWriter is received
by a DataReader.
For some use cases, such as the periodic update of sensor values to a GUI displaying the
value to a person, "best effort" delivery is often good enough. It is certainly the fastest,
most efficient, and least resource-intensive (CPU and network bandwidth) method of
getting the newest/latest value for a topic from DataWriters to DataReaders. But there is
no guarantee that the data sent will be received. It may be lost due to a variety of factors,
including data loss by the physical transport such as wireless RF or even Ethernet.

6.5 DataWriter QosPolicies
6-143
6. Sending Data
Packets received out of order are dropped and a SAMPLE_LOST Status (Section 7.3.6.7)
is generated.
However, there are data streams (topics) in which you want an absolute guarantee that
all data sent by a DataWriter is received reliably by DataReaders. This means that RTI
Data Distribution Service must check whether or not data was received, and repair any
data that was lost by resending a copy of the data as many times as it takes for the
DataReader to receive the data.
RTI Data Distribution Service uses a reliability protocol configured and tuned by these
QoS policies: HISTORY QosPolicy (Section 6.5.8), DATA_WRITER_PROTOCOL
QosPolicy (DDS Extension) (Section 6.5.2), DATA_READER_PROTOCOL QosPolicy
(DDS Extension) (Section 7.6.1), and RESOURCE_LIMITS QosPolicy (Section 6.5.18).
The Reliable QoS policy is simply a switch to turn on the reliability protocol for a
DataWriter/DataReader connection. The level of reliability provided by RTI Data Distri-
bution Service is determined by the configuration of the aforementioned QoS policies.
You can configure RTI Data Distribution Service to deliver ALL data in the order they
were sent (also known as absolute or strict reliability). Or, as a trade-off for less memory,
CPU, and network usage, you can choose a reduced level of reliability where only the
last N values are guaranteed to be delivered reliably to DataReaders (where N is user-
configurable). In the reduced level of reliability, there are no guarantees that the data
sent before the last N are received. Only the last N data packets are monitored and
repaired if necessary.
It includes the members in Table 6.50. For defaults and valid ranges, please refer to the
online documentation.
Table 6.50 DDS_ReliabilityQosPolicy
Type Field Name Description
DDS_ReliabilityQ
osPolicyKind
kind
DDS_BEST_EFFORT_RELIABILITIY_QOS: Data
samples are sent once and missed samples are accept-
able.
DDS_RELIABLE_RELIABILITY_QOS: RTI Data Dis-
tribution Service will make sure that data sent is
received and missed samples are resent.
DDS_Duration_t max_blocking_time
How long a DataWriter can block on a write() when
the send queue is full due to unacknowledged mes-
sages. (Has no meaning for DataReaders.)

Chapter 6
6-144
The kind of RELIABILITY can be either:
❏ BEST_EFFORT RTI Data Distribution Service will send data samples only once to
DataReaders. No effort or resources are spent to track whether or not sent sam-
ples are received. Minimal resources are used. This is the most deterministic
method of sending data since there is no indeterministic delay that can be intro-
duced by buffering or resending data. Data samples may be lost. This setting is
good for periodic data.
❏ RELIABLE RTI Data Distribution Service will send samples reliably to DataReaders–
buffering sent data until they have been acknowledged as being received by
DataReaders and resending any samples that may have been lost during trans-
port. Additional resources configured by the HISTORY and RESOURCE_LIMITS
QosPolicies may be used. Extra packets will be sent on the network to query
(heartbeat) and acknowledge the receipt of samples by the DataReader. This set-
ting is a good choice when guaranteed data delivery is required; for example,
sending events or commands.
While a DataWriter sends data reliably, the HISTORY QosPolicy (Section 6.5.8) and
RESOURCE_LIMITS QosPolicy (Section 6.5.18) determine how many samples can be
stored while waiting for acknowledgements from DataReaders. A sample that is sent reli-
ably is entered in the DataWriter’s send queue awaiting acknowledgement from
DataReaders. How many samples that the DataWriter is allowed to store in the send
queue for a data-instance depends on the kind of the HISTORY QoS as well as the
max_samples_per_instance and max_samples parameter of the RESOURCE_LIMITS
QoS.
If the HISTORY kind is KEEP_LAST, then the DataWriter is allowed to have the HIS-
TORY depth number of samples per instance of the Topic in the send queue. Should the
number of unacknowledge samples in the send queue for a data-instance reach the HIS-
TORY depth, then the next sample written by the DataWriter for the instance will over-
write the oldest sample for the instance in the queue. This implies that an
unacknowledged sample may be overwritten and thus lost. So even if the RELIABILITY
kind is RELIABLE, if the HISTORY kind is KEEP_LAST, it is possible that some data
sent by the DataWriter will not be delivered to the DataReader. What is guaranteed is that
if the DataWriter stops writing, the last N samples that the DataWriter wrote will be
delivered reliably; where n is the value of the HISTORY depth.
However, if the HISTORY kind is KEEP_ALL, then when the send queue is filled with
acknowledged samples (either due to the number of unacknowledged samples for an
instance reaching the RESOURCE_LIMITS max_samples_per_instance value or the
total number of unacknowledged samples have reached the size of the send queue as
specified by RESOURCE_LIMITS max_samples), the next write() operation on the
DataWriter will block until either a sample in the queue has been fully acknowledged by

6.5 DataWriter QosPolicies
6-145
6. Sending Data
DataReaders and thus can be overwritten or a timeout of RELIABILITY
max_blocking_period has been reached.
If there is still no space in the queue when max_blocking_time is reached, the write()
call will return a failure with the error code DDS_RETCODE_TIMEOUT.
Thus for strict reliability—a guarantee that all data samples sent by a DataWriter are
received by DataReaders—you must use a RELIABILITY kind of RELIABLE and a HIS-
TORY kind of KEEP_ALL for both the DataWriter and the DataReader.
Although you can set the RELIABILITY QosPolicy on To pi cs , its value can only be used
to initialize the RELIABILITY QosPolicies of either a DataWriter or DataReader. It does
not directly affect the operation of RTI Data Distribution Service, see Section 5.1.3.
6.5.17.1 Example
This QosPolicy is used to achieve reliable communications, which is discussed in
Chapter 10: Reliable Communications and Section 10.3.1.
6.5.17.2 Properties
This QosPolicy cannot be modified after the Entity has been enabled.
The DataWriter and DataReader must use compatible settings for this QosPolicy. To be
compatible, the DataWriter and DataReader must use one of the valid combinations
shown in Table 6.41.
If this QosPolicy is found to be incompatible, statuses
ON_OFFERED_INCOMPATIBLE_QOS and
ON_REQUESTED_INCOMPATIBLE_QOS will be modified and the corresponding
Listeners called for the DataWriter and DataReader respectively.
There are no compatibility issues regarding the value of max_blocking_wait, since it
does not apply to DataReaders.
Table 6.51 Valid Combinations of Reliability ‘kind’
DataReader requests:
BEST_EFFORT RELIABLE
DataWriter offers:
BEST_EFFORT
✔ incompatible
RELIABLE
✔✔

Chapter 6
6-146
6.5.17.3 Related QosPolicies
❏ HISTORY QosPolicy (Section 6.5.8)
❏ RESOURCE_LIMITS QosPolicy (Section 6.5.18)
6.5.17.4 Applicable Entities
❏ Topics (Section 5.1)
❏ DataWriters (Section 6.3)
❏ DataReaders (Section 7.3)
6.5.17.5 System Resource Considerations
Setting the kind to RELIABLE will cause RTI Data Distribution Service to use up more
resources to monitor and maintain a reliable connection between a DataWriter and all of
its reliable DataReaders. This includes the use of extra CPU and network bandwidth to
send and process heartbeat, ACK/NACK, and repair packets (see Chapter 10: Reliable
Communications).
Setting max_blocking_time to a non-zero number may block the sending thread when
the RELIABILITY kind is RELIABLE.
6.5.18 RESOURCE_LIMITS QosPolicy
For the reliability protocol (and the DURABILITY QosPolicy (Section 6.5.6)), this
QosPolicy determines the actual maximum queue size when the HISTORY QosPolicy
(Section 6.5.8) is set to KEEP_ALL.
In general, this QosPolicy is used to limit the amount of system memory that DDS can
allocate. For embedded real-time systems and safety-critical systems, pre-determination
of maximum memory usage is often required. In addition, dynamic memory allocation
could introduce non-deterministic latencies in time-critical paths.
This QosPolicy can be set such that an entity does not dynamically allocate any more
memory after its initialization phase.
It includes the members in Table 6.52. For defaults and valid ranges, please refer to the
online documentation.
One of the most important fields is max_samples, which sets the size and causes mem-
ory to be allocated for the send or receive queues. For information on how this policy
affects reliability, see Tuning Queue Sizes and Other Resource Limits (Section 10.3.2).

6.5 DataWriter QosPolicies
6-147
6. Sending Data
When a DataWriter or DataReader is created, the initial_instances and initial_samples
parameters determine the amount of memory first allocated for the those Entities. As
the application executes, if more space is needed in the send/receive queues to store
samples or as more instances are created, then RTI Data Distribution Service will auto-
matically allocate memory until the limits of max_instances and max_samples are
reached.
You may set initial_instances = max_instances and initial_samples = max_samples if
you do not want RTI Data Distribution Service to dynamically allocate memory after ini-
tialization.
For keyed To pi cs , the max_samples_per_instance field in this policy represents maxi-
mum number of samples with the same key that are allowed to be stored by a
DataWriter or DataReader. This is a logical limit. The hard physical limit is determined by
max_samples. However, because the theoretical number of instances may be quite large
(as set by max_instances), you may not want RTI Data Distribution Service to allocate the
Table 6.52 DDS_ResourceLimitsQosPolicy
Type Field Name Description
DDS_Long max_samples
Maximum number of samples that RTI Data Distribution
Service
can store for a DataWriter/DataReader. This is a physi-
cal limit.
DDS_Long max_instances
Maximum number of instances that can be managed by a
DataWriter/DataReader.
For DataReaders, max_instances must be <=
max_total_instances in the
DATA_READER_RESOURCE_LIMITS QosPolicy (DDS
Extension) (Section 7.6.2).
See also: Example (Section 6.5.18.3).
DDS_Long
max_samples_
per_instance
Maximum number of samples of any one instance that
RTI
Data Distribution Service
will store for a DataWriter/
DataReader.
If a keyed Topic is not used, then
max_samples_per_instance must equal max_samples.
DDS_Long initial_samples
Initial number of samples that
RTI Data Distribution Service
will store for a DataWriter/DataReader. (DDS extension)
DDS_Long initial_instances
Initial number of instances that can be managed by a
DataWriter/DataReader. (DDS extension)
DDS_Long
instance_hash_
buckets
Number of hash buckets, which are used by
RTI Data Distri-
bution Service
to facilitate instance lookup. (DDS extension).

Chapter 6
6-148
total memory needed to hold the maximum number of samples per instance for all pos-
sible instances (max_samples_per_instance * max_instances) because during normal
operations, the application will never have to hold that much data for the Entity.
So it is possible that an Entity will hit the physical limit max_samples before it hits the
max_samples_per_instance limit for a particular instance. However, RTI Data Distribu-
tion Service must be able to store max_samples_per_instance for at least one instance.
Therefore, max_samples_per_instance
must be <= max_samples.
Important: If a keyed data type is not used, then there is only a single instance of the
Topic, so max_samples_per_instance
must equal max_samples.
Once a physical or logical limit is hit, then how RTI Data Distribution Service deals with
new data samples being sent or received for a DataWriter or DataReader is described in
the HISTORY QosPolicy (Section 6.5.8) setting of DDS_KEEP_ALL_HISTORY_QOS. It
is closely tied to whether or not a reliable connection is being maintained.
Although you can set the RESOURCE_LIMITS QosPolicy on To pi cs , its value can only be
used to initialize the RESOURCE_LIMITS QosPolicies of either a DataWriter or
DataReader. It does not directly affect the operation of RTI Data Distribution Service, see
Section 5.1.3.
6.5.18.1 Configuring Resource Limits for Asynchronous DataWriters
When using an asynchronous Publisher, if a call to write() is blocked due to a resource
limit, the block will last until the timeout period expires, which will prevent others from
freeing the resource. To avoid this situation, make sure that the DomainParticipant’s
outstanding_asynchronous_sample_allocation in the
DOMAIN_PARTICIPANT_RESOURCE_LIMITS QosPolicy (DDS Extension) (Section
8.5.4) is always greater than the sum of all asynchronous DataWriters’ max_samples.
6.5.18.2 Configuring DataWriter Instance Replacement
When the max_instances limit is reached, a DataWriter will try to make space for a new
instance by replacing an existing instance according to the instance replacement kind set
in instance_replacement. For the sake of instance replacement, an instance is consid-
ered to be unregistered, disposed, or alive. The oldest instance of the specified kind, if
such an instance exists, would be replaced with the new instance. Also, all samples of a
replaced instance must already have been acknowledged, such that removing the
instance would not deprive any existing reader from receiving them.
Since an unregistered instance is one that a DataWriter will not update any further,
unregistered instances are replaced before any other instance kinds. This applies for all
instance_replacement kinds; for example, the ALIVE_THEN_DISPOSED kind would
first replace unregistered, then alive, and then disposed instances. The rest of the kinds

6.5 DataWriter QosPolicies
6-149
6. Sending Data
specify one or two kinds (e.g DISPOSED and ALIVE_OR_DISPOSED). For the single
kind, if no unregistered instances are replaceable, and no instances of the specified kind
are replaceable, then the instance replacement will fail. For the others specifying multi-
ple kinds, it either specifies to look for one kind first and then another kind (e.g.
ALIVE_THEN_DISPOSED), meaning if the first kind is found then that instance will be
replaced, or it will replace either of the kinds specified (e.g. ALIVE_OR_DISPOSED),
whichever is older as determined by the time of instance registering, writing, or dispos-
ing.
If an acknowledged instance of the specified kind is found, the DataWriter will reclaim
its resources for the new instance. It will also invoke the DataWriterListener’s
on_instance_replaced() callback (if installed) and notify the user with the handle of the
replaced instance, which can then be used to retrieve the instance key from within the
callback. If no replaceable instances are found, the new instance will fail to be regis-
tered; the DataWriter may block, if the instance registration was done in the context of a
write, or it may return with an out-of-resources return code.
In addition, replace_empty_instances (in the DATA_WRITER_RESOURCE_LIMITS
QosPolicy (DDS Extension) (Section 6.5.3)) configures whether instances with no sam-
ples are eligible to be replaced. If this is set, then a DataWriter will first try to replace
empty instances, even before replacing unregistered instances.
6.5.18.3 Example
If you want to be able to store max_samples_per_instance for every instance, then you
should set
max_samples >= max_instances * max_samples_per_instance
But if you want to save memory and you do not expect that the running application will
ever reach the case where it will see max_instances of instances, then you may use a
smaller value for max_samples to save memory.
In any case, there is a lower limit for max_samples:
max_samples >= max_samples_per_instance
If the HISTORY QosPolicy (Section 6.5.8)’s kind is set to KEEP_LAST, then you should
set:
max_samples_per_instance = HISTORY.depth

Chapter 6
6-150
6.5.18.4 Properties
This QosPolicy cannot be modified after the Entity is enabled.
There are no requirements that the publishing and subscribing sides use compatible val-
ues.
6.5.18.5 Related QosPolicies
❏ HISTORY QosPolicy (Section 6.5.8)
❏ RELIABILITY QosPolicy (Section 6.5.17)
❏ For DataReaders, max_instances must be <= max_total_instances in the
DATA_READER_RESOURCE_LIMITS QosPolicy (DDS Extension) (Section
7.6.2)
6.5.18.6 Applicable Entities
❏ Topics (Section 5.1)
❏ DataWriters (Section 6.3)
❏ DataReaders (Section 7.3)
6.5.18.7 System Resource Considerations
Larger initial_* numbers will increase the initial system memory usage. Larger max_*
numbers will increase the worst-case system memory usage.
Increasing instance_hash_buckets speeds up instance-lookup time but also increases
memory usage.
tIn addition to the previous encapsulation IDs, RTI Data Distribution Service provides
two aliases:
❏ DDS_ENCAPSULATION_CDR_NATIVE refers to
DDS_ENCAPSULATION_ID_CDR_BE in big-endian architectures and
DDS_ENCAPSULATION_ID_CDR_LE in little-endian architectures.
❏ DDS_ENCAPSULATION_PL_CDR_NATIVE refers to
DDS_ENCAPSULATION_ID_PL_CDR_BE in big-endian architectures and
DDS_ENCAPSULATION_ID_PL_CDR_LE in little-endian architectures.
6.5 DataWriter QosPolicies
6-151
6. Sending Data
6.5.19 TRANSPORT_PRIORITY QosPolicy
The TRANSPORT_PRIORITY QosPolicy is optional and only partially supported on
certain OSs and transports by RTI. However, its intention is to allow you to specify on a
per-DataWriter basis that the data sent by a DataWriter is of a different priority.
It is not specified by DDS how a DDS implementation shall treat data of different prior-
ities. It is often difficult or impossible for DDS implementations to treat data of higher
priority differently than data of lower priority, especially when data is being sent (deliv-
ered to a physical transport) directly by the thread that called DataWriter’s write() oper-
ation. Also, many physical network transports themselves do not have a end-user
controllable level of data packet priority.
In RTI Data Distribution Service, for the UDPv4 built-in transport, the value set in the
TRANSPORT_PRIORITY QosPolicy is used in a setsockopt call to set the TOS (type of
service) bits of the IPv4 header for datagrams sent by a DataWriter. It is platform depen-
dent on how and whether or not the setsockopt has an effect. On some platforms such as
Windows and Linux, external permissions must be given to the user application in
order to set the TOS bits.
It is incorrect to assume that using the TRANSPORT_PRIORITY QosPolicy will have
any effect at all on the end-to-end delivery of data from a DataWriter to a DataReader. All
network elements such as switches and routers must have the capability and be enabled
to actually use the TOS bits to treat higher priority packets differently. Thus the ability to
use the TRANSPORT_PRIORITY QosPolicy must be designed and configured at a sys-
tem level; just turning it on in an application may have no effect at all.
It includes the member in Table 6.53. For the default and valid range, please refer to the
online documentation.
RTI Data Distribution Service will propagate the value set on a per-DataWriter basis to the
transport when the DataWriter publishes data. It is up to the implementation of the
transport to do something with the value, if anything.
Although you can set the TRANSPORT_PRIORITY QosPolicy on Top ic s, its value can
only be used to initialize the TRANSPORT_PRIORITY QosPolicies of a DataWriter. It
does not directly affect the operation of RTI Data Distribution Service, see Section 5.1.3.
Table 6.53 DDS_TransportPriorityQosPolicy
Type Field Name Description
DDS_Long value Hint as to how to set the priority.

Chapter 6
6-152
6.5.19.1 Example
Should RTI Data Distribution Service be configured with a transport that can use and will
honor the concept of a prioritized message, then you would be able to create a
DataWriter of a Topic whose data samples, when published, will be sent at a higher pri-
ority than other DataWriters that use the same transport.
6.5.19.2 Properties
This QosPolicy may be modified after the entity is created.
It does not apply to DataReaders, so there is no requirement that the publishing and sub-
scribing sides use compatible values.
6.5.19.3 Related QosPolicies
This QosPolicy does not interact with any other policies.
6.5.19.4 Applicable Entities
❏ Topics (Section 5.1)
❏ DataWriters (Section 6.3)
6.5.19.5 System Resource Considerations
The use of this policy does not significantly impact the use of resources. However, if a
transport is implemented to use the value set by this policy, then there may be trans-
port-specific issues regarding the resources that the transport implementation itself
uses.
6.5.20 TRANSPORT_SELECTION QosPolicy (DDS Extension)
The TRANSPORT_SELECTION QosPolicy allows you to select the transports that have
been installed with the DomainParticipant to be used by the DataWriter or DataReader.
An application may be simultaneously connected to many different physical transports,
e.g., Ethernet, Infiniband, shared memory, VME backplane, and wireless. By default, the
middleware will use up to 4 transports to deliver data from a DataWriter to a DataReader.
This QosPolicy can be used to both limit and control which of the application’s available
transports may be used by a DataWriter to send data or by a DataReader to receive data.
It includes the member in Table 6.54. For more information, please refer to the online
documentation.

6.5 DataWriter QosPolicies
6-153
6. Sending Data
RTI Data Distribution Service allows user to configure the transports that it uses to send
and receive messages. A number of built-in transports, such as UDPv4 and shared
memory, are available as well as custom ones that the user may implement and install.
Each transport will be installed in the DomainParticipant with one or more aliases.
To enable a DataWriter or DataReader to use a particular transport, add the alias to the
enabled_transports sequence of this QosPolicy. An empty sequence is a special case,
and indicates that all transports installed in the DomainParticipant can be used by the
DataWriter or DataReader.
For more information on configuring and installing transports, please see the online
documentation (from the Modules page, select RTI Data Distribution Service API Ref-
erence, Pluggable Transports).
6.5.20.1 Example
Suppose a DomainParticipant has both UDPv4 and shared memory transports installed.
If you want a particular DataWriter to publish its data only over shared memory, then
you should use this QosPolicy to specify that restriction.
6.5.20.2 Properties
This QosPolicy cannot be modified after the Entity is created.
It can be set differently for the DataWriter and the DataReader.
6.5.20.3 Related QosPolicies
❏ TRANSPORT_UNICAST QosPolicy (DDS Extension) (Section 6.5.21)
❏ TRANSPORT_MULTICAST QosPolicy (DDS Extension) (Section 7.6.5)
❏ TRANSPORT_BUILTIN QosPolicy (DDS Extension) (Section 8.5.8)
6.5.20.4 Applicable Entities
❏ DataWriters (Section 6.3)
❏ DataReaders (Section 7.3)
Table 6.54 DDS_TransportSelectionQosPolicy
Type Field Name Description
DDS_StringSeq enabled_transports
A sequence of aliases for the transports that may be
used by the DataWriter or DataReader.

Chapter 6
6-154
6.5.20.5 System Resource Considerations
By restricting DataWriters from sending or DataReaders from receiving over certain
transports, you may decrease the load on those transports.
6.5.21 TRANSPORT_UNICAST QosPolicy (DDS Extension)
The TRANSPORT_UNICAST QosPolicy allows you to specify unicast network
addresses to be used by DomainParticipant, DataWriters and DataReaders for receiving
messages.
DDS may send data to a variety of DDS Entities, not just DataReaders. DomainParticipants
receive messages to support the discovery process discussed in Chapter 12. DataWriters
may receive ACK/NACK messages to support the reliable protocol discussed in
Chapter 10.
During discovery, each Entity announces to remote applications a list of (up to 4) uni-
cast addresses to which the remote application should use send data (either user data
packets or reliable protocol meta-data such as ACK/NACK and Heartbeats).
By default, the list of addresses is populated automatically with values obtained from
the enabled transport plugins allowed to be used by the Entity (see the
TRANSPORT_BUILTIN QosPolicy (DDS Extension) (Section 8.5.8) and
TRANSPORT_SELECTION QosPolicy (DDS Extension) (Section 6.5.20)). Also, the asso-
ciated ports are automatically determined (see Inbound Ports for User Traffic (Section
12.5.2)).
Use TRANSPORT_UNICAST QosPolicy to manually set the receive address list for an
Entity. You may optionally set a port to use a non-default receive port as well. Only the
first 4 addresses will be used. DDS will create a receive thread for every unique port
number that it encounters (on a per transport basis).
The QosPolicy structure includes the members in Table 6.55. For more information and
default values, please refer to the online documentation.
A message sent to a unicast address will be received by a single node on the network (as
opposed to a multicast address where a single message may be received by multiple
nodes). This policy sets the unicast addresses and ports that remote entities should use
Table 6.55 DDS_TransportUnicastQosPolicy
Type Field Name Description
DDS_TransportUnicast
SettingsSeq
(see Table 6.56)
value
A sequence of up to 4 unicast settings that should be
used by remote entities to address messages to be sent
to this Entity.

6.5 DataWriter QosPolicies
6-155
6. Sending Data
when sending messages to the Entity on which the TRANSPORT_UNICAST QosPolicy
is set.
Up to four “return” unicast addresses may be configured for an Entity. Instead of speci-
fying addresses directly, you use the transports field of the
DDS_TransportUnicastSetting_t to select the transports (using their aliases) on which
remote entities should send messages destined for this Entity. The addresses of the
selected transports will be the “return” addresses. See the online documentation about
configuring transports and aliases (from the Modules page, select RTI Data Distribu-
tion Service API Reference, Pluggable Transports).
Note, a single transport may have more than one unicast address. For example, if a node
has multiple network interface cards (NICs), then the UDPv4 transport will have an
address for each NIC. When using the TRANSPORT_UNICAST QosPolicy to set the
return addresses, a single value for the DDS_TransportUnicastSettingsSeq may pro-
vide more than the four return addresses that RTI Data Distribution Service currently
uses.
Whether or not you are able to configure the network interfaces that are allowed to be
used by a transport is up to the implementation the transport. For the built-in UDPv4
transport, you may restrict an instance of the transport to use a subset of the available
network interfaces. See the online documentation for the builtin UDPv4 transport for
more information.
For a DomainParticipant, this QoS policy sets the default list of addresses used by other
applications to send user data for local DataReaders.
For a reliable DataWriter, if set, the other applications will use the specified list of
addresses to send reliable protocol packets (ACKS/NACKS) on the behalf of reliable
DataReaders. Otherwise, if not set, the other applications will use the addresses set by
the DomainParticipant.
Table 6.56 DDS_TransportUnicastSettings_t
Type Field Name Description
DDS_StringSeq transports
A sequence of transport aliases that specifies which
transports should be used to receive unicast messages
for this Entity.
DDS_Long receive_port
The port that should be used in the addressing of uni-
cast messages destined for this Entity. A value of 0 will
cause RTI Data Distribution Service to use a default port
number based on domain and participant ids. See
Ports Used for Discovery (Section 12.5).

Chapter 6
6-156
For a DataReader, if set, then other applications will use the specified list of addresses to
send user data (and reliable protocol packets for reliable DataReaders). Otherwise, if not
set, the other applications will use the addresses set by the DomainParticipant.
For a DataReader, if the port number specified by this QoS is the same as a port number
specified by a TRANSPORT_MULTICAST QoS, then the transport may choose to pro-
cess data received both via multicast and unicast with a single thread. Whether or not a
transport must use different threads to process data received via multicast or unicast for
the same port number depends on the implementation of the transport.
To use this QosPolicy, you also need to specify a port number. A port number of 0 will
cause RTI Data Distribution Service to automatically use a default value. As explained in
Ports Used for Discovery (Section 12.5), the default port number for unicast addresses is
based on the domain and participant IDs. Should you choose to use a different port
number, then for every unique port number used by Entities in your application,
depending on the transport, RTI Data Distribution Service may create a thread to process
messages received for that port on that transport. See Chapter 17: RTI Data Distribution
Service Threading Model for more about threads.
Threads are created on a per-transport basis, so if this QosPolicy specifies multiple
transports for a receive_port, then a thread may be created for each transport for that
unique port. Some transports may be able to share a single thread for different ports,
others can not. Different Entities can share the same port number, and thus, the same
thread will process all of the data for all of the Entities sharing the same port number for
a transport.
Note: If a DataWriter is using the MULTI_CHANNEL QosPolicy (DDS Extension) (Sec-
tion 6.5.12), the unicast addresses specified in the TRANSPORT_UNICAST QosPolicy
are ignored by that DataWriter. The DataWriter will not publish samples on those loca-
tors.
6.5.21.1 Example
You may use this QosPolicy to restrict an Entity from receiving data through a particular
transport. For example, on a multi-NIC (network interface card) system, you may install
different transports for different NICs. Then you can balance the network load between
network cards by using different values for the TRANSPORT_UNICAST QosPolicy for
different DataReaders. Thus some DataReaders will receive their data from one NIC and
other DataReaders will receive their data from another.
6.5.21.2 Properties
This QosPolicy cannot be modified after the Entity is created.
It can be set differently for the DomainParticipant, the DataWriter and the DataReader.

6.5 DataWriter QosPolicies
6-157
6. Sending Data
6.5.21.3 Related QosPolicies
❏ MULTI_CHANNEL QosPolicy (DDS Extension) (Section 6.5.12)
❏ TRANSPORT_SELECTION QosPolicy (DDS Extension) (Section 6.5.20)
❏ TRANSPORT_MULTICAST QosPolicy (DDS Extension) (Section 7.6.5)
❏ TRANSPORT_BUILTIN QosPolicy (DDS Extension) (Section 8.5.8)
6.5.21.4 Applicable Entities
❏ DomainParticipants (Section 8.3)
❏ DataWriters (Section 6.3)
❏ DataReaders (Section 7.3)
6.5.21.5 System Resource Considerations
Because this QosPolicy changes the transports on which messages are received for dif-
ferent Entities, the bandwidth used on the different transports may be affected.
Depending on the implementation of a transport, RTI Data Distribution Service may need
to create threads to receive and process data on a unique-port-number basis. Some
transports can share the same thread to process data received for different ports; others
like UDPv4 must have different threads for different ports. In addition, if the same port
is used for both unicast and multicast, the transport implementation will determine
whether or not the same thread can be used to process both unicast and multicast data.
For UDPv4, only one thread is needed per port–independent of whether the data was
received via unicast or multicast data. See Receive Threads (Section 17.3) for more infor-
mation.
6.5.22 TYPESUPPORT QosPolicy (DDS Extension)
The TypeSupport QosPolicy allows you to set a void * value with a DataWriter or
DataReader. This void * value is passed to the serialization routine of the data type
associated with the DataWriter or the deserialization routine of the data type associated
with the DataReader.
The de/serialization routines may be coded to act differently depending on the infor-
mation passed in via the void * value. The auto-generated serialization and deserial-
ization code by the rtiddsgen utility does not use the void * value. Usually, for the
TypeSupport QosPolicy to have any effect, you will need to use a data type whose seri-
alization/deserialization code has been customized.
Chapter 6
6-158
This functionality can be used to change how data sent by a DataWriter or received by a
DataReader is serialized or deserialized on a per DataWriter and DataReader basis. It can
also be used to change dynamically how serialization (or for a less common case, deseri-
alization) occurs. For example, a data type could represent a table, including the names
of the rows and columns. However, since the row/column names of an instance of the
table (a Topic) don't change, they only need to be sent once. The information passed in
through the TypeSupport QosPolicy could be used to signal the serialization routine to
send the row/column names the first time a DataWriter calls write(), and then never
again.
It includes the members in Table 6.57.
6.5.22.1 Properties
This QoS policy may be modified after the DataWriter or DataReader is enabled.
It can be set differently for the DataWriter and DataReader.
6.5.22.2 Related QoS Policies
None.
6.5.22.3 Applicable Entities
❏ DataWriters (Section 6.3)
❏ DataReaders (Section 7.3)
❏ DomainParticipants (Section 8.3)
6.5.22.4 System Resource Considerations
None.
6.5.23 USER_DATA QosPolicy
This QosPolicy provides an area where your application can store additional informa-
tion related to a DomainParticipant, DataWriter, or DataReader. This information is passed
between applications during discovery (see Chapter 12: Discovery) using built-in-topics
Table 6.57 DDS_TypeSupportQosPolicy
Type Field Name Description
void * plugin_data
Value to pass into the type plug-in's serialization/dese-
rialization function.

6.5 DataWriter QosPolicies
6-159
6. Sending Data
(see Chapter 14: Built-In Topics). How this information is used will be up to user code.
RTI Data Distribution Service does not do anything with the information stored as
USER_DATA except to pass it to other applications.
Use cases are usually for application-to-application identification, authentication,
authorization, and encryption purposes. For example, applications can use Group or
User Data to send security certificates to each other for RSA-type security.
The value of the USER_DATA QosPolicy is sent to remote applications when they are
first discovered, as well as when the DomainParticipant, DataWriter or DataReader’s
set_qos() methods are called after changing the value of the USER_DATA. User code
can set listeners on the built-in DataReaders of the built-in To pic s used by RTI Data Distri-
bution Service to propagate discovery information. Methods in the built-in topic listeners
will be called whenever new DomainParticipants, DataReaders, and DataWriters are
found. Within the user callback, you will have access to the USER_DATA that was set
for the associated Entity.
Currently, USER_DATA of the associated Entity is only propagated with the information
that declares a DomainParticipant, DataWriter or DataReader. Thus, you will need to
access the value of USER_DATA through DDS_ParticipantBuiltinTopicData,
DDS_PublicationBuiltinTopicData or DDS_SubscriptionBuiltinTopicData (see
Chapter 14: Built-In Topics).
The structure for the USER_DATA QosPolicy includes just one field, as seen in
Table 6.58. The field is a sequence of octets that translates to a contiguous buffer of bytes
whose contents and length is set by the user. The maximum size for the data are set in
the DOMAIN_PARTICIPANT_RESOURCE_LIMITS QosPolicy (DDS Extension) (Sec-
tion 8.5.4).
This policy is similar to the GROUP_DATA QosPolicy (Section 6.4.4) and TOPIC_DATA
QosPolicy (Section 5.2.1) that apply to other types of Entities.
6.5.23.1 Example
One possible use of USER_DATA is to pass some credential or certificate that your sub-
scriber application can use to accept or reject communication with the DataWriters (or
vice versa, where the publisher application can validate the permission of DataReaders
to receive its data). Using the same method, an application (DomainParticipant) can
accept or reject all connections from another application. The value of the USER_DATA
Table 6.58 DDS_UserDataQosPolicy
Type Field Name Description
DDS_OctetSeq value Default: empty

Chapter 6
6-160
of the DomainParticipant is propagated in the ‘user_data’ field of the
DDS_ParticipantBuiltinTopicData that is sent with the declaration of each DomainPar-
ticipant. Similarly, the value of the USER_DATA of the DataWriter is propagated in the
‘user_data’ field of the DDS_PublicationBuiltinTopicData that is sent with the declara-
tion of each DataWriter, and the value of the USER_DATA of the DataReader is propa-
gated in the ‘user_data’ field of the DDS_SubscriptionBuiltinTopicData that is sent
with the declaration of each DataReader.
When RTI Data Distribution Service discovers a DomainParticipant/DataWriter/
DataReader, the application can be notified of the discovery of the new entity and
retrieve information about the Entity’s QoS by reading the DCPSParticipant, DCPS-
Publication or DCPSSubscription built-in topics (see Chapter 14: Built-In Topics). The
user application can then examine the USER_DATA field in the built-in Topic and decide
whether or not the remote Entity should be allowed to communicate with the local
Entity. If communication is not allowed, the application can use the DomainParticipant’s
ignore_participant(), ignore_publication() or ignore_subscription() operation to reject
the newly discovered remote entity as one with which the application allows RTI Data
Distribution Service to communicate. See Figure 14.2 for an example of how to do this.
6.5.23.2 Properties
This QosPolicy can be modified at any time. A change in the QosPolicy will cause RTI
Data Distribution Service to send packets containing the new USER_DATA to all of the
other applications in the domain.
It can be set differently on the publishing and subscribing sides.
6.5.23.3 Related QosPolicies
❏ TOPIC_DATA QosPolicy (Section 5.2.1)
❏ GROUP_DATA QosPolicy (Section 6.4.4)
❏ DOMAIN_PARTICIPANT_RESOURCE_LIMITS QosPolicy (DDS Extension)
(Section 8.5.4)
6.5.23.4 Applicable Entities
❏ DataWriters (Section 6.3)
❏ DataReaders (Section 7.3)
❏ DomainParticipants (Section 8.3)

6.5 DataWriter QosPolicies
6-161
6. Sending Data
6.5.23.5 System Resource Considerations
As mentioned earlier, the maximum size of the USER_DATA is set in the
participant_user_data_max_length, writer_user_data_max_length, and
reader_user_data_max_length fields of the
DOMAIN_PARTICIPANT_RESOURCE_LIMITS QosPolicy (DDS Extension) (Section
8.5.4). Because RTI Data Distribution Service will allocated memory based on this value,
you should only increase this value if you need to. If your system does not use
USER_DATA, then you can set this value to 0 to save memory. Setting the value of the
USER_DATA QosPolicy to hold data longer than the value set in the [partici-
pant,writer,reader]_user_data_max_length field will result in failure and an
INCONSISTENT_QOS_POLICY return code.
However, should you decide to change the maximum size of USER_DATA, you must
make certain that all applications in the RTI Data Distribution Service domain have
changed the value of [participant,writer,reader]_user_data_max_length to be the same.
If two applications have different limits on the size of USER_DATA, and one application
sets the USER_DATA QosPolicy to hold data that is greater than the maximum size set
by another application, then the DataWriters and DataReaders between the two applica-
tions will not connect. The DomainParticipants may also reject connections from each
other entirely. This is also true for the GROUP_DATA (Section 6.4.4) and TOPIC_DATA
(Section 5.2.1) QosPolicies.
6.5.24 WRITER_DATA_LIFECYCLE QoS Policy
This QoS policy controls how a DataWriter handles the lifecycle of the instances (keys)
that the DataWriter is registered to manage.
You may use the DataWriter’s unregister() operation to indicate that the DataWriter no
longer wants to send data for a Topic. This QoS controls whether or not DDS automati-
cally also calls dispose() on the behalf of the DataWriter for the data.
The behavior controlled by this QoS applies on a per instance (key) basis for keyed Top-
ics, so that when a DataWriter unregisters an instance, RTI Data Distribution Service can
automatically also dispose that instance. This is the default behavior.
In many cases where the ownership of a Topic is shared (see the OWNERSHIP QosPol-
icy (Section 6.5.13)), DataWriters may want to relinquish ownership of a particular
instance of the Topic to allow other DataWriters to send updates for the value of that
instance regardless of Ownership Strength. In that case, you may only want a
DataWriter to unregister an instance without disposing the instance. Disposing an
instance implies that the DataWriter no longer owns that instance, but it is a stronger
statement to say that instance no longer exists.

Chapter 6
6-162
User applications may be coded to trigger on the disposal of instances, thus the ability
to unregister without disposing may be useful to properly maintain the semantic of dis-
posal.
When a DataWriter unregisters an instance, it means that this particular DataWriter has
no more information/data on this instance. When an instance is disposed, it means that
the instance is "dead"—there will no more information/data from any DataWriter on
this instance.
This provides the same behavior as explicitly calling one of the dispose() operations
(Section 6.3.11.2) on the instance before calling unregister() (Section 6.3.11.1), provided
that autodispose_unregistered_instances is set to RTI_TRUE (the default).
When you delete a DataWriter (Section 6.3.1), all of the instances managed by the
DataWriter are automatically unregistered. Therefore, this QoS policy will determine
whether or not instances are disposed when the DataWriter is deleted by calling one of
these operations:
❏ Publisher’s delete_datawriter() (see Section 6.3.1)
❏ Publisher’s delete_contained_entities() (see Section 6.2.3.1)
❏ DomainParticipant’s delete_contained_entities() (see Section 8.3.3)
It includes the members in Table 6.59.
6.5.24.1 Properties
It does not apply to DataReaders, so there is no requirement that the publishing and sub-
scribing sides use compatible values.
This QoS policy may be modified after the DataWriter is enabled.
6.5.24.2 Related QoS Policies
None.
Table 6.59 DDS_WriterDataLifecycleQosPolicy
Type Field Name Description
RTIBool
autodispose_unregistered_
instances
RTI_TRUE (default): instance is disposed when unreg-
istered.
RTI_FALSE: instance is not disposed when unregis-
tered.

6.6 Flow Controllers (DDS Extension)
6-163
6. Sending Data
6.5.24.3 Applicable Entities
❏ DataWriters (Section 6.3)
6.5.24.4 System Resource Considerations
None.
6.6 Flow Controllers (DDS Extension)
A FlowController is the object responsible for shaping the network traffic by determin-
ing when attached asynchronous DataWriters are allowed to write data.
To use a FlowController, you provide its name in the DataWriter’s PUBLISH_MODE
QosPolicy (DDS Extension) (Section 6.5.16).
You can use one of these built-in FlowControllers and optionally modify their proper-
ties, or create a custom FlowController using the DomainParticipant’s
create_flowcontroller() operation (see Section 6.6.4):
❏ DDS_DEFAULT_FLOW_CONTROLLER_NAME
By default, flow control is disabled. That is, the built-in
DDS_DEFAULT_FLOW_CONTROLLER_NAME flow controller does not apply
any flow control. Instead, it allows data to be sent asynchronously as soon as it is
written by the DataWriter.
❏ DDS_FIXED_RATE_FLOW_CONTROLLER_NAME
The built-in DDS_FIXED_RATE_FLOW_CONTROLLER_NAME flow controller
shapes the network traffic by allowing data to be sent only once every second.
Any accumulated samples destined for the same destination are coalesced into
as few network packets as possible.
❏ DDS_ON_DEMAND_FLOW_CONTROLLER_NAME
The built-in DDS_ON_DEMAND_FLOW_CONTROLLER_NAME allows data
to be sent only when you call the FlowController’s trigger_flow() operation.
With each trigger, all accumulated data since the previous trigger is sent (across
all Publishers or DataWriters). In other words, the network traffic shape is fully
controlled by the user. Any accumulated samples destined for the same destina-
tion are coalesced into as few network packets as possible.

Chapter 6
6-164
This external trigger source is ideal for users who want to implement some form
of closed-loop flow control or who want to only put data on the wire every so
many samples (e.g., with the number of samples based on
NDDS_Transport_Property_t’s gather_send_buffer_count_max).
The default property settings for the built-in FlowControllers are listed in the online
documentation.
Samples written by an asynchronous DataWriter are not sent in the context of the write()
call. Instead, RTI Data Distribution Service puts the samples in a queue for future process-
ing. The FlowController associated with each asynchronous DataWriter determines
when the samples are actually sent.
Each FlowController maintains a separate FIFO queue for each unique destination
(remote application). Samples written by asynchronous DataWriters associated with the
FlowController are placed in the queues that correspond to the intended destinations of
the sample.
When tokens become available, a FlowController must decide which queue(s) to grant
tokens first. This is determined by the FlowController's scheduling_policy property
(see Table 6.60). Once a queue has been granted tokens, it is serviced by the asynchro-
nous publishing thread. The queued up samples will be coalesced and sent to the corre-
sponding destination. The number of samples sent depends on the data size and the
number of tokens granted.
Table 6.60 lists the properties for a FlowController.
Table 6.61 lists the operations available for a FlowController.
6.6.1 Flow Controller Scheduling Policies
❏ Round Robin (DDS_RR_FLOW_CONTROLLER_SCHED_POLICY) Indicates to
flow control in a round-robin (RR) fashion.
Table 6.60 DDS_FlowControllerProperty_t
Type Field Name Description
DDS_FlowControllerSchedulingPolicy
scheduling_
policy
Either “round-robin” or
“earliest-deadline-first.”
See Section 6.6.1.
DDS_FlowControllerTokenBucketProperty_t token_bucket See Section 6.6.3.

6.6 Flow Controllers (DDS Extension)
6-165
6. Sending Data
Whenever tokens become available, the FlowController distributes the tokens
uniformly across all of its (non-empty) destination queues. No destinations are
prioritized. Instead, all destinations are treated equally and are serviced in a
round-robin fashion.
❏ Earliest-Deadline-First (DDS_EDF_FLOW_CONTROLLER_SCHED_POLICY)
Indicates to flow control in an earliest-deadline-first (EDF) fashion.
A sample's deadline is determined by the time it was written plus the latency
budget of the DataWriter at the time of the write call (as specified in the
DDS_LatencyBudgetQosPolicy). The relative priority of a flow controller's desti-
nation queue is determined by the earliest deadline across all samples it con-
tains.
When tokens become available, the FlowController distributes tokens to the des-
tination queues in order of their priority. In other words, the queue containing
the sample with the earliest deadline is serviced first. The number of tokens
granted equals the number of tokens required to send the first sample in the
queue. Note that the priority of a queue may change as samples are sent (i.e.,
removed from the queue). If a sample must be sent to multiple destinations or
two samples have an equal deadline value, the corresponding destination
queues are serviced in a round-robin fashion.
So with the default duration of 0 in the LatencyBudgetQosPolicy, using an
EDF_FLOW_CONTROLLER_SCHED_POLICY FlowController preserves the
order in which you call write() across the DataWriters associated with the Flow-
Controller.
Since the LatencyBudgetQosPolicy is mutable, a sample written second may
contain an earlier deadline than the sample written first if the
DDS_LatencyBudgetQosPolicy’s duration is sufficiently decreased in between
Table 6.61 FlowController Operations
Operation Description Reference
get_property
Get and Set the FlowController properties. Section 6.6.6
set_property
trigger_flow Provides an external trigger to the FlowController. Section 6.6.7
get_name Returns the name of the FlowController.
Section 6.6.8
get_participant
Returns the DomainParticipant to which the FlowCon-
troller belongs.

Chapter 6
6-166
writing the two samples. In that case, if the first sample is not yet written (still in
queue waiting for its turn), it inherits the priority corresponding to the (earlier)
deadline from the second sample.
In other words, the priority of a destination queue is always determined by the
earliest deadline among all samples contained in the queue. This priority inheri-
tance approach is required in order to both honor the updated duration and to
adhere to the DataWriter in-order data delivery guarantee.
6.6.2 Managing Fast DataWriters When Using a FlowController
If a DataWriter is writing samples faster than its attached FlowController can throttle,
RTI Data Distribution Service may drop samples on the writer’s side. This happens
because the samples may be removed from the queue before the asynchronous pub-
lisher’s thread has a chance to send them. To work around this problem, either:
❏ Use reliable communication to block the write() call and thereby throttle your
application.
❏ Do not allow the queue to fill up in the first place.
The queue should be sized large enough to handle expected write bursts, so that
no samples are dropped. Then in steady state, the FlowController will smooth
out these bursts and the queue will ideally have only one entry.
6.6.3 Token Bucket Properties
FlowControllers use a token-bucket approach for open-loop network flow control. The
flow control characteristics are determined by the token bucket properties. The proper-
ties are listed in Table 6.62; see the online documentation for their defaults and valid
ranges.
Table 6.62 DDS_FlowControllerTokenBucketProperty_t
Type Field Name Description
DDS_Long max_tokens
Maximum number of tokens than can accumu-
late in the token bucket. See Section 6.6.3.1.
DDS_Long tokens_added_per_period
The number of tokens added to the token
bucket per specified period. See Section 6.6.3.2.
DDS_Long tokens_leaked_per_period
The number of tokens removed from the token
bucket per specified period. See Section 6.6.3.3.

6.6 Flow Controllers (DDS Extension)
6-167
6. Sending Data
Asynchronously published samples are queued up and transmitted based on the token
bucket flow control scheme. The token bucket contains tokens, each of which represents
a number of bytes. Samples can be sent only when there are sufficient tokens in the
bucket. As samples are sent, tokens are consumed. The number of tokens consumed is
proportional to the size of the data being sent. Tokens are replenished on a periodic
basis.
The rate at which tokens become available and other token bucket properties determine
the network traffic flow.
Note that if the same sample must be sent to multiple destinations, separate tokens are
required for each destination. Only when multiple samples are destined to the same
destination will they be coalesced and sent using the same token(s). In other words,
each token can only contribute to a single network packet.
6.6.3.1 max_tokens
The maximum number of tokens in the bucket will never exceed this value. Any excess
tokens are discarded. This property value, combined with bytes_per_token, determines
the maximum allowable data burst.
Use DDS_LENGTH_UNLIMITED to allow accumulation of an unlimited amount of
tokens (and therefore potentially an unlimited burst size).
6.6.3.2 tokens_added_per_period
A FlowController transmits data only when tokens are available. Tokens are periodi-
cally replenished. This field determines the number of tokens added to the token bucket
with each periodic replenishment.
Available tokens are distributed to associated DataWriters based on the
scheduling_policy. Use DDS_LENGTH_UNLIMITED to add the maximum number of
tokens allowed by max_tokens.
DDS_Duration_t period
Period for adding tokens to and removing
tokens from the bucket. See Section 6.6.3.4.
DDS_Long bytes_per_token
Maximum number of bytes allowed to send for
each token available. See Section 6.6.3.5.
Table 6.62 DDS_FlowControllerTokenBucketProperty_t
Type Field Name Description

Chapter 6
6-168
6.6.3.3 tokens_leaked_per_period
When tokens are replenished and there are sufficient tokens to send all samples in the
queue, this property determines whether any or all of the leftover tokens remain in the
bucket.
Use DDS_LENGTH_UNLIMITED to remove all excess tokens from the token bucket
once all samples have been sent. In other words, no token accumulation is allowed.
When new samples are written after tokens were purged, the earliest point in time at
which they can be sent is at the next periodic replenishment.
6.6.3.4 period
This field determines the period by which tokens are added or removed from the token
bucket.
The special value DDS_DURATION_INFINITE can be used to create an on-demand
FlowController, for which tokens are no longer replenished periodically. Instead, tokens
must be added explicitly by calling the FlowController’s trigger_flow() operation. This
external trigger adds tokens_added_per_period tokens each time it is called (subject to
the other property settings).
Note: Once period is set to DDS_DURATION_INFINITE, it can no longer be reverted to
a finite period.
6.6.3.5 bytes_per_token
This field determines the number of bytes that can actually be transmitted based on the
number of tokens.
Tokens are always consumed in whole by each DataWriter. That is, in cases where
bytes_per_token is greater than the sample size, multiple samples may be sent to the
same destination using a single token (regardless of the scheduling_policy).
Where fragmentation is required, the fragment size will be either (a) bytes_per_token
or (b) the minimum of the largest message sizes across all transports installed with the
DataWriter, whichever is less.
Use DDS_LENGTH_UNLIMITED to indicate that an unlimited number of bytes can be
transmitted per token. In other words, a single token allows the recipient DataWriter to
transmit all its queued samples to a single destination. A separate token is required to
send to each additional destination.

6.6 Flow Controllers (DDS Extension)
6-169
6. Sending Data
6.6.4 Creating and Deleting FlowControllers
If you do not want to use one of the three builtin FlowControllers described in Flow
Controllers (DDS Extension) (Section 6.6), you can create your own with the DomainPar-
ticipant’s create_flowcontroller() operation:
DDSFlowController* create_flowcontroller
(const char * name,
const DDS_FlowControllerProperty_t & property)
To associate a FlowController with a DataWriter, you set the FlowController’s name in
the PUBLISH_MODE QosPolicy (DDS Extension) (Section 6.5.16)
(flow_controller_name).
A single FlowController may service multiple DataWriters, even if they belong to a dif-
ferent Publisher. The FlowController’s property structure determines how the FlowCon-
troller shapes the network traffic.
name name of the FlowController to create. A DataWriter is associated with a DDS-
FlowController by name. Limited to 255 characters.
property Properties to be used for creating the FlowController. The special value
DDS_FLOW_CONTROLLER_PROPERTY_DEFAULT can be used to indicate that
the FlowController should be created with the default
DDS_FlowControllerProperty_t set in the DomainParticipant.
Note: If you use DDS_FLOW_CONTROLLER_PROPERTY_DEFAULT, it is not
safe to create the flow controller while another thread may be simultaneously call-
ing set_default_flowcontroller_property() or looking for that flow controller
with lookup_flowcontroller().
To delete an existing FlowController, use the DomainParticipant’s
delete_flowcontroller() operation:
DDS_ReturnCode_t delete_flowcontroller (DDSFlowController * fc)
The FlowController must belong this the DomainParticipant and not have any attached
DataWriters or the delete call will return an error (PRECONDITION_NOT_MET).

Chapter 6
6-170
6.6.5 Getting and Setting Default FlowController Properties for
DomainParticipants
To get the default DDS_FlowControllerProperty_t values, use this operation on the
DomainParticipant:
DDS_ReturnCode_t get_default_flowcontroller_property
(DDS_FlowControllerProperty_t & property)
The retrieved property will match the set of values specified on the last successful call to
the DomainParticipant’s set_default_flowcontroller_property(), or else, if the call was
never made, the default values listed in DDS_FlowControllerProperty_t.
To change the default DDS_FlowControllerProperty_t values used when a new Flow-
Controller is created, use this operation on the DomainParticipant:
DDS_ReturnCode_t set_default_flowcontroller_property
(const DDS_FlowControllerProperty_t & property)
The special value DDS_FLOW_CONTROLLER_PROPERTY_DEFAULT may be passed
for the property to indicate that the default property should be reset to the default val-
ues the factory would use if set_default_flowcontroller_property() had never been
called.
Note: It is not safe to set the default FlowController properties while another thread
may be simultaneously calling get_default_flowcontroller_property(),
set_default_flowcontroller_property(), or create_flowcontroller() with
DDS_FLOW_CONTROLLER_PROPERTY_DEFAULT as the qos parameter. It is also
not safe to get the default FlowController properties while another thread may be
simultaneously calling get_default_flowcontroller_property().
6.6.6 Getting and Setting Properties for a Specific FlowController
To get the properties of a FlowController, use the FlowController’s get_property() oper-
ation:
DDS_ReturnCode_t DDSFlowController::get_property
(struct DDS_FlowControllerProperty_t & property)
To change the properties of a FlowController, use the FlowController’s set_property()
operation:
DDS_ReturnCode_t DDSFlowController::set_property
(const struct DDS_FlowControllerProperty_t & property)
Once a FlowController has been instantiated, only its token_bucket property can be
changed. The scheduling_policy is immutable. A new token.period only takes effect at
the next scheduled token distribution time (as determined by its previous value).

6.6 Flow Controllers (DDS Extension)
6-171
6. Sending Data
The special value DDS_FLOW_CONTROLLER_PROPERTY_DEFAULT can be used to
match the current default properties set in the DomainParticipant.
6.6.7 Adding an External Trigger
Typically, a FlowController uses an internal trigger to periodically replenish its tokens.
The period by which this trigger is called is determined by the period property setting.
The trigger_flow() function provides an additional, external trigger to the FlowCon-
troller. This trigger adds tokens_added_per_period tokens each time it is called (subject
to the other property settings of the FlowController).
DDS_ReturnCode_t trigger_flow ()
An on-demand FlowController can be created with a DDS_DURATION_INFINITE as
period, in which case the only trigger source is external (i.e. the FlowController is solely
triggered by the user on demand).
trigger_flow() can be called on both a strict on-demand FlowController and a hybrid
FlowController (internally and externally triggered).
6.6.8 Other FlowController Operations
If you have the FlowController object and need its name, call the FlowController’s
get_name() operation:
const char* DDSFlowController::get_name( )
Conversely, if you have the name of the FlowController and need the FlowController
object, call the DomainPartipant’s lookup_flowcontroller() operation:
DDSFlowController* lookup_flowcontroller (const char * name)
To get a FlowController’s DomainParticipant, call the FlowController’s get_participant()
operation:
DDSDomainParticipant* get_participant ( )
Note: It is not safe to lookup a flow controller description while another thread is creat-
ing that flow controller.

Chapter 6
6-172

7-1
7. Receiving Data
Chapter 7 Receiving Data
This chapter discusses how to create, configure, and use Subscribers and DataReaders to
receive data. It describes how these objects interact, as well as the types of operations
that are available for them.
This chapter includes the following sections:
❏ Preview: Steps to Receiving Data (Section 7.1)
❏ Subscribers (Section 7.2)
❏ DataReaders (Section 7.3)
❏ Using DataReaders to Access Data (Read & Take) (Section 7.4)
❏ Subscriber QosPolicies (Section 7.5)
❏ DataReader QosPolicies (Section 7.6)
The goal of this chapter is to help you become familiar with the Entities you need for
receiving data. For up-to-date details such as formal parameters and return codes on
any mentioned operations, please see the online documentation.

Chapter 7
7-2
7.1 Preview: Steps to Receiving Data
There are three ways to receive data:
❏ Your application can explicitly check for new data by calling a DataReader’s
read() or take() method. This method is also known as polling for data.
❏ Your application can be notified asynchronously whenever new data samples
arrive—this is done with a Listener on either the Subscriber or the DataReader. RTI
Data Distribution Service will invoke the Listener’s callback routine when there is
new data. Within the callback routine, user code can access the data by calling
read() or take() on the DataReader. This method is the way for your application to
receive data with the least amount of latency.
❏ Your application can wait for new data by using Conditions and a WaitSet, then
calling wait(). RTI Data Distribution Service will block your application’s thread
until the criteria (such as the arrival of samples, or a specific status) set in the
Condition becomes true. Then your application resumes and can access the data
with read() or take().
The DataReader’s read() operation gives your application a copy of the data and leaves
the data in the DataReader’s receive queue. The DataReader’s take() operation removes
data from the receive queue before giving it to your application.
See Section 7.4 for details on using DataReaders to access received data.
See Section 4.6 for details on using Conditions and WaitSets.
To prepare to receive data, create and configure the required Entities:
1. Create a DomainParticipant.
2. Register user data types
1
with the DomainParticipant. For example, the ‘FooData-
Type’.
3. Use the DomainParticipant to create a Topic with the registered data type.
4. Optionally
2
, use the DomainParticipant to create a Subscriber.
5. Use the Subscriber or DomainParticipant to create a DataReader for the Top ic.
1. Type registration is not required for built-in types (see Section 3.2.1).
2. You are not required to explicitly create a Subscriber; instead, you can use the 'implicit Subscriber' created
from the DomainParticipant. See Creating Subscribers Explicitly vs. Implicitly (Section 7.2.1).

7.1 Preview: Steps to Receiving Data
7-3
7. Receiving Data
6. Use a type-safe method to cast the generic DataReader created by the Subscriber to
a type-specific DataReader. For example, ‘FooDataReader’.
Now use one of the following mechanisms to receive data.
To receive data samples by polling for new data:
❏ Using a FooDataReader, use the read() or take() operations to access the data
samples that have been received and stored for the DataReader. These operations
can be invoked at any time, even if the receive queue is empty.
To receive data samples asynchronously:
❏ Install a Listener on the DataReader or Subscriber that will be called back by an
internal RTI Data Distribution Service thread when new data samples arrive for
the DataReader.
1. Create a DDSDataReaderListener for the FooDataReader or a DDSSubscriberLis-
tener for Subscriber. In C++, C++/CLI, C# and Java, you must derive your own
Listener class from those base classes. In C, you must create the individual
functions and store them in a structure.
If you created a DDSDataReaderListener with the on_data_available() callback
enabled: on_data_available() will be called when new data arrives for that
DataReader.
If you created a DDSSubscriberListener with the on_data_on_readers() call-
back enabled: on_data_on_readers() will be called when data arrives for any
DataReader created by the Subscriber.
2. Install the Listener on either the FooDataReader or Subscriber.
For the DataReader, the Listener should be installed to handle changes in the
D ATA _ AVA I L A B L E status.
For the Subscriber, the Listener should be installed to handle changes in the
DATA_ON_READERS status.
3. Only 1 Listener will be called back when new data arrives for a DataReader.
RTI Data Distribution Service will call the Subscriber’s Listener if it is installed.
Otherwise, the DataReader’s Listener is called if it is installed. That is, the
on_data_on_readers() operation takes precedence over the
on_data_available() operation.

Chapter 7
7-4
If neither Listeners are installed or neither Listeners are enabled to handle their
respective statuses, then RTI Data Distribution Service will not call any user
functions when new data arrives for the DataReader.
4. In the on_data_available() method of the DDSDataReaderListener, invoke
read() or take() on the FooDataReader to access the data.
If the on_data_on_readers() method of the DDSSubscriberListener is called,
the code can invoke read() or take() directly on the Subscriber’s DataReaders
that have received new data. Alternatively, the code can invoke the Sub-
scriber’s notify_datareaders() operation. This will in turn call the
on_data_available() methods of the DataReaderListeners (if installed and
enabled) for each of the DataReaders that have received new data samples.
To wait (block) until data samples arrive:
1. Use the DataReader to create a ReadCondition that describes the samples for which
you want to wait. For example, you can specify that you want to wait for never-
before-seen samples from DataReaders that are still considered to be ‘alive.’
Alternatively, you can create a StatusCondition that specifies you want to wait for
the ON_DATA_AVAILABLE status.
2. Create a WaitSet.
3. Attach the ReadCondition or StatusCondition to the WaitSet.
4. Call the WaitSet’s wait() operation, specifying how long you are willing to wait
for the desired samples. When wait() returns, it will indicate that it timed out, or
that the attached Condition become true (and therefore the desired samples are
available).
5. Using a FooDataReader, use the read() or take() operations to access the data
samples that have been received and stored for the DataReader.
7.2 Subscribers
An application that intends to subscribe to information needs the following DDS Enti-
ties: DomainParticipant, Topic, Subscriber, and DataReader. All DDS Entities have a corre-
sponding specialized Listener and a set of QosPolicies. The Listener is how RTI Data
Distribution Service notifies your application of status changes relevant to the DDS
Entity. The QosPolicies allow your application to configure the behavior and resources
of the DDS Entity.

7.2 Subscribers
7-5
7. Receiving Data
❏ The DomainParticipant defines the domain on which the information will be
available.
❏ The Topic defines the name of the data to be subscribed, as well as the type (for-
mat) of the data itself.
❏ The DataReader is the Entity used by the application to subscribe to updated val-
ues of the data. The DataReader is bound at creation time to a Topic, thus specify-
ing the named and typed data stream to which it is subscribed. The application
uses the DataWriter’s read() or take() operation to access data samples received
for the Topic.
❏ The Subscriber manages the activities of several DataReader entities. The applica-
tion receives data using a DataReader that belongs to a Subscriber. However, the
Subscriber will determine when the data received from applications is actually
available for access through the DataReader. Depending on the settings of various
QosPolicies of the Subscriber and DataReader, data may be buffered until data
samples for associated DataReaders are also received. By default, the data is avail-
able to the application as soon as it is received.
For more information, see Creating Subscribers Explicitly vs. Implicitly (Section
7.2.1).
The UML diagram in Figure 7.1 shows how these Entities are related as well as the
methods defined for each Entity.
Subscribers are used to perform the operations listed in Table 7.1. For details such as for-
mal parameters and return codes, please see the online documentation. Otherwise, you
can find more information about the operations by looking in the section listed under
the Reference column.
Note: Some operations cannot be used within a listener callback, see Restricted Opera-
tions in Listener Callbacks (Section 4.5.1).

Chapter 7
7-6
Figure 7.1 Subscription Module
7.2 Subscribers
7-7
7. Receiving Data
Table 7.1 Subscriber Operations
Working
with ... Operation Description Reference
DataReaders
begin_access
Indicates that the application is about to access
the data samples in the DataReaders of the Sub-
scriber.
Currently not
supported.
create_datareader Creates a DataReader.
Section 7.3.1
create_datareader_
with_profile
Creates a DataReader with QoS from a specified
QoS profile.
copy_from_topic_qos
Copies relevant QosPolicies from a Topic into a
DataReaderQoS structure.
Section 7.2.4.5
delete_contained_
entities
Deletes all the DataReaders that were created by
the Subscriber. Also deletes the corresponding
ReadConditions created by the contained DataRead-
ers.
Section 7.2.3.1
delete_datareader Deletes a specific DataReader. Section 7.3.2
end_access
Indicates that the application is done accessing
the data samples in the DataReaders of the Sub-
scriber.
Currently not
supported.
get_datareaders
Returns a list of DataReaders that contain samples
with the specified sample_states, view_states and
instance_states.
Section 7.2.6
get_default_datareader
_qos
Copies the Subscriber’s default DataReaderQos
values into a DataReaderQos structure.
Section 7.2.4
get_status_changes Gets all status changes. Section 4.1.4
lookup_datareader
Retrieves a DataReader previously created for a
specific Topic.
Section 7.2.7
notify_datareaders
Invokes the on_data_available() operation for
attached Listeners of DataReaders that have new
data samples.
Section 7.2.5
set_default_datareader_
qos
Sets or changes the Subscriber’s default DataRead-
erQoS values.
Section 7.2.4

Chapter 7
7-8
Libraries
and Profiles
get_default_library Gets the Subscriber’s default QoS profile library.
Section 7.2.4.3
get_default_profile Gets the Subscriber’s default QoS profile.
get_default_profile_
library
Gets the library that contains the Subscriber’s
default QoS profile.
set_default_library Sets the default library for a Subscriber.
set_default_profile Sets the default profile for a Subscriber.
Participants
get_participant Gets the Subscriber’s DomainParticipant. Section 7.2.7
Subscribers
enable Enables the Subscriber. Section 4.1.2
get_listener Gets the currently installed Listener. Section 7.2.5
get_qos
Gets the Subscriber’s current QosPolicy settings.
This is most often used in preparation for calling
set_qos.
Section 7.2.4.2
set_listener
Sets the Subscriber’s Listener. If you created the
Subscriber without a Listener, you can use this
operation to add one later.
Section 7.2.5
set_qos
Sets the Subscriber’s QoS. You can use this opera-
tion to change the values for the Subscriber’s
QosPolicies. Note, however, that not all QosPoli-
cies can be changed after the Subscriber has been
created.
Section 7.2.4.2
set_qos_with_profile Sets the Subscriber’s QoS based on a QoS profile. Section 7.2.4.2
Table 7.1 Subscriber Operations
Working
with ... Operation Description Reference

7.2 Subscribers
7-9
7. Receiving Data
7.2.1 Creating Subscribers Explicitly vs. Implicitly
To receive data, your application must have a Subscriber. However, you are not required
to explicitly create a Subscriber. If you do not create one, the middleware will implicitly
create a Subscriber the first time you create a DataReader using the DomainParticipant’s
operations. It will be created with default QoS (DDS_SUBCRIBER_QOS_DEFAULT)
and no Listener. The 'implicit Subscriber' can be accessed using the DomainParticipant’s
get_implicit_subscriber() operation (see Section 8.3.9).You can use this ‘implicit Sub-
scriber’ just like any other Subscriber (it has the same operations, QosPolicies, etc.). So
you can change the mutable QoS and set a Listener if desired.
A Subscriber (implicit or explicit) gets its own default QoS and the default QoS for its
child DataReaders from the DomainParticipant. These default QoS are set when the Sub-
scriber is created. (This is true for Publishers and DataWriters, too.)
DataReaders are created by calling create_datareader() or
create_datareader_with_profile()—these operations exist for DomainParticipants and
Subscribers. If you use the DomainParticipant to create a DataReader, it will belong to the
implicit Subscriber. If you use a Subscriber to create a DataReader, it will belong to that
Subscriber.
The middleware will use the same implicit Subscriber for all DataReaders that are created
using the DomainParticipant’s operations.
Having the middleware implicitly create a Subscriber allows you to skip the step of cre-
ating a Subscriber. However, having all your DataReaders belong to the same Subscriber
can reduce the concurrency of the system because all the read operations will be serial-
ized.

Chapter 7
7-10
7.2.2 Creating Subscribers
Before you can explicitly create a Subscriber, you need a DomainParticipant (Section 8.3).
To create a Subscriber, use the DomainParticipant’s create_subscriber() or
create_subscriber_with_profile() operation:
DDSSubscriber* create_subscriber(
const DDS_SubscriberQos &qos,
DDSSubscriberListener *listener,
DDS_StatusMask mask)
DDSSubscriber* create_subscriber_with_profile (
const char * library_name,
const char * profile_name,
DDSSubscriberListener * listener,
DDS_StatusMask mask )
A QoS profile is way to use QoS settings from an XML file or string. With this approach,
you can change QoS settings without recompiling the application. For details, see
Chapter 15: Configuring QoS with XML.
qos If you want the default QoS settings (described in the online documentation), use
DDS_SUBSCRIBER_QOS_DEFAULT for this parameter (see Figure 7.2). If you
want to customize any of the QosPolicies, supply a QoS structure (see Figure 7.3).
The QoS structure for a Subscriber is described in Section 7.5.
Note: If you use DDS_SUBSCRIBER_QOS_DEFAULT, it is not safe to create the
Subscriber while another thread may be simultaneously calling
set_default_subscriber_qos().
listener Listeners are callback routines. RTI Data Distribution Service uses them to notify
your application when specific events (new data samples arrive and status
changes) occur with respect to the Subscriber or the DataReaders created by the
Subscriber. The listener parameter may be set to NULL if you do not want to install
a Listener. If you use NULL, the Listener of the DomainParticipant to which the Sub-
scriber belongs will be used instead (if it is set). For more information on Subscrib-
erListeners, see Section 7.2.5.
mask This bit-mask indicates which status changes will cause the Subscriber’s Listener
to be invoked. The bits set in the mask must have corresponding callbacks imple-
mented in the Listener. If you use NULL for the Listener, use
DDS_STATUS_MASK_NONE for this parameter. If the Listener implements all
callbacks, use DDS_STATUS_MASK_ALL. For information on Status, see Listen-
ers (Section 4.4).

7.2 Subscribers
7-11
7. Receiving Data
library_name A QoS Library is a named set of QoS profiles. See QoS Libraries (Section
15.9).
profile_name A QoS profile groups a set of related QoS, usually one per entity. See QoS
Profiles (Section 15.8).
For more examples, see Configuring QoS Settings when the Subscriber is Created (Sec-
tion 7.2.4.1).
After you create a Subscriber, the next step is to use the Subscriber to create a DataReader
for each Topic, see Section 7.3.1. For a list of operations you can perform with a Sub-
scriber, see Table 7.1.
7.2.3 Deleting Subscribers
This section applies to both implicitly and explicitly created Subscribers.
To delete a Subscriber:
1. You must first delete all DataReaders that were created with the Subscriber. Use
the Subscriber’s delete_datareader() operation (Section 7.3.1) to delete them one
at a time, or use the delete_contained_entities() operation (Section 7.2.3.1) to
delete them all at the same time.
DDS_ReturnCode_t delete_datareader (DDSDataReader *a_datareader)
2. Delete the Subscriber by using the DomainParticipant’s delete_subscriber() opera-
tion ().
Note: A Subscriber cannot be deleted within a listener callback, see Restricted Operations
in Listener Callbacks (Section 4.5.1).
Figure 7.2 Creating a Subscriber with Default QosPolicies
// create the subscriber
DDSSubscriber* subscriber =
participant->create_subscriber(DDS_SUBSCRIBER_QOS_DEFAULT,
NULL,
DDS_STATUS_MASK_NONE);
if (subscriber == NULL) {
// handle error
}

Chapter 7
7-12
7.2.3.1 Deleting Contained DataReaders
The Subscriber’s delete_contained_entities() operation deletes all the DataReaders that
were created by the Subscriber. It also deletes the ReadConditions created by each con-
tained DataReader.
DDS_ReturnCode_t DDSSubscriber::delete_contained_entities ()
After this operation returns successfully, the application may delete the Subscriber (see
Section 7.2.3).
The operation will return PRECONDITION_NOT_MET if any of the contained entities
cannot be deleted. This will occur, for example, if a contained DataReader cannot be
deleted because the application has called read() but has not called the corresponding
return_loan() operation to return the loaned samples.
7.2.4 Setting Subscriber QosPolicies
A Subscriber’s QosPolicies control its behavior. Think of the policies as the configuration
and behavior ‘properties’ for the Subscriber. The DDS_SubscriberQos structure has the
following format:
struct DDS_SubscriberQos {
DDS_PresentationQosPolicy presentation;
DDS_PartitionQosPolicy partition;
DDS_GroupDataQosPolicy group_data;
DDS_EntityFactoryQosPolicy entity_factory;
DDS_ExclusiveAreaQosPolicy exclusive_area;
};
Note:
set_qos() cannot always be used by a Listener, see Restricted Operations in Lis-
tener Callbacks (Section 4.5.1).
Table 7.2 summarizes the meaning of each policy. Subscribers have the same set of
QosPolicies as Publishers; they are described in detail in Publisher/Subscriber QosPoli-
cies (Section 6.4). For information on why you would want to change a particular
QosPolicy, see the referenced section. For defaults and valid ranges, please refer to the
online documentation for each policy.

7.2 Subscribers
7-13
7. Receiving Data
7.2.4.1 Configuring QoS Settings when the Subscriber is Created
As described in Creating Subscribers (Section 7.2.2), there are different ways to create a
Subscriber, depending on how you want to specify its QoS (with or without a QoS Pro-
file).
❏ In Figure 7.2 on page 7-11 we saw an example of how to explicitly create a Sub-
scriber with default QosPolicies. It used the special constant,
DDS_SUBSCRIBER_QOS_DEFAULT, which indicates that the default QoS val-
ues for a Subscriber should be used. The default Subscriber QosPolicies are con-
figured in the DomainParticipant; you can change them with the
DomainParticipant’s set_default_subscriber_qos() or
set_default_subscriber_qos_with_profile() operation (see Section 8.3.6.4).
❏ To create a Subscriber with non-default QoS settings, without using a QoS profile,
see Figure 7.3 on page 7-14. It uses the DomainParticipant’s
get_default_subscriber_qos() method to initialize a DDS_subscriberQos struc-
ture. Then the policies are modified from their default values before the QoS
structure is passed to create_subscriber().
❏ You can also create a Subscriber and specify its QoS settings via a QoS Profile. To
do so, call create_subscriber_with_profile(), as seen in Figure 7.4 on page 7-14.
❏ If you want to use a QoS profile, but then make some changes to the QoS before
creating the Subscriber, call get_subscriber_qos_from_profile(), modify the QoS
and use the modified QoS structure when calling create_subscriber(), as seen in
Figure 7.5 on page 7-15.
Table 7.2 Subscriber QosPolicies
QosPolicy Description
ENTITYFACTORY QosPolicy
(Section 6.4.2)
Whether or not new entities created from this entity will start
out as ‘enabled.’
EXCLUSIVE_AREA QosPolicy
(DDS Extension)
(Section 6.4.3)
Whether or not the entity uses a multi-thread safe region with
deadlock protection.
GROUP_DATA QosPolicy
(Section 6.4.4)
A place to pass group-level information among applications.
Usage is application-dependent.
PARTITION QosPolicy
(Section 6.4.5)
Set of strings that introduces a logical partition among Topics
visible by Publisher/Subscriber.
PRESENTATION QosPolicy
(Section 6.4.6)
The order in which instance changes are presented to the Sub-
scriber. By default, no order is used.

Chapter 7
7-14
For more information, see Creating Subscribers (Section 7.2.2) and Chapter 15: Config-
uring QoS with XML.
DDS_SubscriberQos subscriber_qos;
1
// get defaults
if (participant->get_default_subscriber_qos(subscriber_qos) !=
DDS_RETCODE_OK){
// handle error
}
// make QoS changes here
// for example, this changes the ENTITY_FACTORY QoS
subscriber_qos.entity_factory.autoenable_created_entities =
DDS_BOOLEAN_FALSE;
// create the subscriber
DDSSubscriber * subscriber =
participant->create_subscriber(subscriber_qos,
NULL,
DDS_STATUS_MASK_NONE);
if (subscriber == NULL) {
// handle error
}
1. For the C API, you need to use DDS_SubscriberQos_INITIALIZER or
DDS_SubscriberQos_initialize(). See Special QosPolicy Handling Considerations for C (Section 4.2.2)
Figure 7.3
Creating a Subscriber with Non-default QosPolicies (not from a profile)
// create the subscriber with QoS profile
DDSSubscriber * subscriber =
participant->create_subscriber_with_profile(
“MySubscriberLibary”,
“MySubscriberProfile”,
NULL, DDS_STATUS_MASK_NONE);
if (subscriber == NULL) {
// handle error
}
Figure 7.4 Creating a Subscriber with a QoS Profile

7.2 Subscribers
7-15
7. Receiving Data
7.2.4.2 Changing QoS Settings After the Subscriber Has Been Created
There are 2 ways to change an existing Subscriber’s QoS after it is has been created—
again depending on whether or not you are using a QoS Profile.
❏ To change an existing Subscriber’s QoS programmatically (that is, without using a
QoS profile), get_qos() and set_qos(). See the example code in Figure 7.6 on
page 7-16. It retrieves the current values by calling the Subscriber’s get_qos()
operation. Then it modify the value and call set_qos() to apply the new value.
Note, however, that some QosPolicies cannot be changed after the Subscriber has
been enabled—this restriction is noted in the descriptions of the individual
QosPolicies.
DDS_SubscriberQos subscriber_qos;
1
// Get subscriber QoS from profile
retcode = factory->get_subscriber_qos_from_profile(subscriber_qos,
“SubscriberLibrary”,
“SubscriberProfile”);
if (retcode != DDS_RETCODE_OK) {
// handle error
}
// Makes QoS changes here
// for example, this changes the ENTITY_FACTORY QoS
subscriber_qos.entity_factory.autoenable_created_entities =
DDS_BOOLEAN_TRUE;
// create the subscriber with modified QoS
DDSPublisher* subscriber = participant->create_subscriber(
“Example Foo”,
type_name,
subscriber_qos,
NULL, DDS_STATUS_MASK_NONE);
if (subscriber == NULL) {
// handle error
}
1. For the C API, you need to use DDS_SubscriberQos_INITIALIZER or
DDS_SubscriberQos_initialize(). See Special QosPolicy Handling Considerations for C (Section 4.2.2)
Figure 7.5
Getting QoS Values from a Profile, Changing QoS Values, Creating a Subscriber with
Modified QoS Values

Chapter 7
7-16
❏ You can also change a Subscriber’s (and all other Entities’) QoS by using a QoS
Profile and calling set_qos_with_profile(). For an example, see Figure 7.7 on
page 7-16. For more information, see Chapter 15: Configuring QoS with XML.
DDS_SubscriberQos subscriber_qos;
1
// Get current QoS. subscriber points to an existing DDSSubscriber.
if (subscriber->get_qos(subscriber_qos) != DDS_RETCODE_OK) {
// handle error
}
// make changes
// New entity_factory autoenable_created_entities will be true
subscriber_qos.entity_factory.autoenable_created_entities =
DDS_BOOLEAN_TRUE;
// Set the new QoS
if (subscriber->set_qos(subscriber_qos) != DDS_RETCODE_OK ) {
// handle error
}
1. For the C API, you need to use DDS_SubscriberQos_INITIALIZER or
DDS_SubscriberQos_Initialize(). See Special QosPolicy Handling Considerations for C (Section 4.2.2)
Figure 7.6
Changing the Qos of an Existing Subscriber
retcode = subscriber->set_qos_with_profile(
“SubscriberProfileLibrary”,”SubscriberProfile”);
if (retcode != DDS_RETCODE_OK) {
// handle error
}
Figure 7.7 Changing the QoS of an Existing Subscriber with a QoS Profile

7.2 Subscribers
7-17
7. Receiving Data
7.2.4.3 Getting and Settings the Subscriber’s Default QoS Profile and Library
You can retrieve the default QoS profile used to create Subscribers with the
get_default_profile() operation. You can also get the default library for Subscribers, as
well as the library that contains the Subscriber’s default profile (these are not necessarily
the same library); these operations are called get_default_library() and
get_default_library_profile(), respectively. These operations are for informational pur-
poses only (that is, you do not need to use them as a precursor to setting a library or pro-
file.) For more information, see Chapter 15: Configuring QoS with XML.
virtual const char * get_default_library ()
const char * get_default_profile ()
const char * get_default_profile_library ()
There are also operations for setting the Subscriber’s default library and profile:
DDS_ReturnCode_t set_default_library (const char * library_name)
DDS_ReturnCode_t set_default_profile (const char * library_name,
const char * profile_name)
These operations only affect which library/profile will be used as the default the next
time a default Subscriber library/profile is needed during a call to one of this Subscriber’s
operations.
When calling a Subscriber operation that requires a profile_name parameter, you can
use NULL to refer to the default profile. (This same information applies to setting a
default library.)
If the default library/profile is not set, the Subscriber inherits the default from the
DomainParticipant.
set_default_profile() does not set the default QoS for DataReaders created by the Sub-
scriber; for this functionality, use the Subscriber’s
set_default_datareader_qos_with_profile(), see Section 7.2.4.4 (you may pass in NULL
after having called the Subscriber’s set_default_profile()).
set_default_profile() does not set the default QoS for newly created Subscribers; for this
functionality, use the DomainParticipant’s set_default_subscriber_qos_with_profile()
operation, see Section 8.3.6.4.

Chapter 7
7-18
7.2.4.4 Getting and Setting Default QoS for DataReaders
These operations set the default QoS that will be used for new DataReaders if
create_datareader() is called with DDS_DATAREADER_QOS_DEFAULT as the ‘qos’
parameter:
DDS_ReturnCode_t set_default_datareader_qos (
const DDS_DataReaderQos &qos)
DDS_ReturnCode_t set_default_datareader_qos_with_profile (
const char *library_name,
const char *profile_name)
The above operations may potentially allocate memory, depending on the sequences
contained in some QoS policies.
To get the default QoS that will be used for creating DataReaders if create_datareader() is
called with DDS_DATAREADER_QOS_DEFAULT as the ‘qos’ parameter:
DDS_ReturnCode_t get_default_datareader_qos (
DDS_DataReaderQos & qos)
The above operation gets the QoS settings that were specified on the last successful call
to set_default_datareader_qos() or set_default_datareader_qos_with_profile(), or else,
if the call was never made, the default values listed in DDS_DataReaderQos.
Note: It is not safe to set the default DataReader QoS values while another thread may be
simultaneously calling get_default_datareader_qos(), set_default_datareader_qos() or
create_datareader() with DDS_DATAREADER_QOS_DEFAULT as the qos parameter.
It is also not safe to get the default DataReader QoS values while another thread may be
simultaneously calling set_default_datareader_qos(),

7.2 Subscribers
7-19
7. Receiving Data
7.2.4.5 Subscriber QoS-Related Operations
❏ Copying a Topic’s QoS into a DataReader’s QoS This method is provided as a
convenience for setting the values in a DataReaderQos structure before using that
structure to create a DataReader. As explained in Section 5.1.3, most of the policies
in a Topic Qos structure do not apply directly to the Topic itself, but to the associ-
ated DataWriters and DataReaders of that Topic. The Top ic Qos serves as a single
container where the values of QosPolicies that must be set compatibly across
matching DataWriters and DataReaders can be stored.
Thus instead of setting the values of the individual QosPolicies that make up a
DataReaderQos structure every time you need to create a DataReader for a Topic,
you can use the Subscriber’s copy_from_topic_qos() operation to “import” the
Top ic ’s QosPolicies into a DataReaderQos structure. This operation copies the rele-
vant policies in the Top ic Qo s to the corresponding policies in the DataReaderQos.
This copy operation will often be used in combination with the Subscriber’s
get_default_datareader_qos() and the Topic’s get_qos() operations. The Topic’s
QoS values are merged on top of the Subscriber’s default DataReader QosPolicies
with the result used to create a new DataReader, or to set the QoS of an existing
one (see Section 7.3.7).
❏ Copying a Subscriber’s QoS In the C API users should use the
DDS_SubscriberQos_copy() operation rather than using structure assignment
when copying between two QoS structures. The copy() operation will perform a
deep copy so that policies that allocate heap memory such as sequences are cop-
ied correctly. In C++, C++/CLI, C# and Java, a copy constructor is provided to
take care of sequences automatically.
❏ Clearing QoS-Related Memory Some QosPolicies contain sequences that allo-
cate memory dynamically as they grow or shrink. The C API’s
DDS_SubscriberQos_finalize() operation frees the memory used by sequences
but otherwise leaves the QoS unchanged. C users should call finalize() on all
DDS_SubscriberQos objects before they are freed, or for QoS structures allo-
cated on the stack, before they go out of scope. In C++, C++/CLI, C# and Java,
the memory used by sequences is freed in the destructor.
7.2.5 Setting Up SubscriberListeners
Like all DDS Entities, Subscribers may optionally have Listeners. Listeners are user-
defined objects that implement a DDS-defined interface (i.e. a pre-defined set of call-
back functions). Listeners provide the means for RTI Data Distribution Service to notify
applications of any changes in Statuses (events) that may be relevant to it. By writing the

Chapter 7
7-20
callback functions in the Listener and installing the Listener into the Subscriber, applica-
tions can be notified to handle the events of interest. For more general information on
Listeners and Statuses, see Section 4.4.
Note: Some operations cannot be used within a listener callback, see Restricted Opera-
tions in Listener Callbacks (Section 4.5.1).
As illustrated in Figure 7.1, the SubscriberListener interface extends the DataReaderLis-
tener interface. In other words, the SubscriberListener interface contains all the functions
in the DataReaderListener interface. In addition, a SubscriberListener has 1 additional func-
tion
on_data_on_readers()
corresponding to the Subscriber’s DATA_ON_READERS status. This is the only status
that is specific to a Subscriber. This status is closely tied to the D ATA _ AVA I L A B L E status
(Section 7.3.6.1) of DataReaders.
The Subscriber’s DATA_ON_READERS status is set whenever the DATA_AVAILABLE
status is set for any of the DataReaders created by the Subscriber. This implies that one of
its DataReaders has received new data samples. When the DATA_ON_READERS status
is set, the SubscriberListener’s on_data_on_readers() method will be invoked.
The DATA_ON_READERS status of a Subscriber takes precedence over the
D ATA _ AVA I L A B L E status of any of its DataReaders. Thus, when data arrives for a
DataReader, the on_data_on_readers() operation of the SubscriberListener will be called
instead of the on_data_available() operation of the DataReaderListener—assuming that
the Subscriber has a Listener installed that is enabled to handle changes in the
DATA_ON_READERS status. (Note however, that in the SubscriberListener’s
on_data_on_readers() operation, you may choose to call notify_datareaders(), which in
turn may cause the DataReaderListener’s on_data_available() operation to be called.)
All of the other methods of a SubscriberListener will be called back for changes in the Sta-
tuses of Subscriber
’s DataReaders only if the DataReader is not set up to handle the statuses
itself.
If you want a Subscriber to handle status events for its DataReaders, you can set up a Sub-
scriberListener during the Subscriber’s creation or use the set_listener() method after the
Subscriber is created. The last parameter is a bit-mask with which you should set which
Status events that the SubscriberListener will handle. For example,
DDS_StatusMask mask = DDS_REQUESTED_DEADLINE_MISSED_STATUS |
DDS_REQUESTED_INCOMPATIBLE_QOS_STATUS;
subscriber =
participant->create_subscriber(DDS_SUBSCRIBER_QOS_DEFAULT,
listener, mask);

7.2 Subscribers
7-21
7. Receiving Data
or
DDS_StatusMask mask = DDS_REQUESTED_DEADLINE_MISSED_STATUS |
DDS_REQUESTED_INCOMPATIBLE_QOS_STATUS;
subscriber->set_listener(listener, mask);
As previously mentioned, the callbacks in the SubscriberListener act as ‘default’ callbacks
for all the DataReaders contained within. When RTI Data Distribution Service wants to
notify a DataReader of a relevant Status change (for example,
SUBSCRIPTION_MATCHED), it first checks to see if the DataReader has the corre-
sponding DataReaderListener callback enabled (such as the on_subscription_matched()
operation). If so, RTI Data Distribution Service dispatches the event to the DataReaderLis-
tener callback. Otherwise, RTI Data Distribution Service dispatches the event to the corre-
sponding SubscriberListener callback.
NOTE, the reverse is true for the DATA_ON_READERS/DATA_AVAILABLE status.
When D ATA _ AVA I L A B L E changes for any DataReaders of a Subscriber, RTI Data Distri-
bution Service first checks to see if the SubscriberListener has DATA_ON_READERS
enabled. If so, RTI Data Distribution Service will invoke the on_data_on_readers() call-
back. Otherwise, RTI Data Distribution Service dispatches the event to the Listener
(on_data_available()) of the DataReader whose D ATA _ AVA I L A B L E status actually
changed.
A particular callback in a DataReader is not enabled if either:
❏ The application installed a NULL DataReaderListener (meaning there are no call-
backs for the DataReader at all).
❏ The application has disabled the callback for a DataReaderListener. This is done by
turning off the associated status bit in the mask parameter passed to the
set_listener() or create_datareader() call when installing the DataReaderListener
on the DataReader. For more information on DataReaderListener, see Section 7.3.3.
Similarly, the callbacks in the DomainParticipantListener act as ‘default’ callbacks for all
the Subscribers that belong to it. For more information on DomainParticipantListeners, see
Section 8.3.5.
The Subscriber also provides an operation called notify_datareaders() that can be used
to invoke the on_data_available() callbacks of DataReaders who have new data samples
in their receive queues. Often notify_datareaders() will be used in the
on_data_on_readers() callback to pass off the real processing of data from the Subscrib-
erListener to the individual DataReaderListeners.
Calling notify_datareaders() causes the DATA_ON_READERS status to be reset.

Chapter 7
7-22
Figure 7.8 shows a SubscriberListener that simply notifies its DataReaders when new data
arrives.
7.2.6 Getting DataReaders with Specific Samples
The Subscriber’s get_datareaders() operation retrieves a list of DataReaders that have
samples with specific sample_states, view_states, and instance_states.
DDS_ReturnCode_t get_datareaders (DDSDataReaderSeq & readers,
DDS_SampleStateMask sample_states,
DDS_ViewStateMask view_states,
DDS_InstanceStateMask instance_states)
Qualified DataReaders (those with samples that match the desired states) will appear in
the returned list, in an unspecified order.
For more information, see The SampleInfo Structure (Section 7.4.5).
class MySubscriberListener : public DDSSubscriberListener {
public:
void on_data_on_readers(DDSSubscriber *);
/* For this example we take no action other operations */
};
void MySubscriberListener::on_data_on_readers
(DDSSubscriber *subscriber)
{
... // do global processing
// now dispatch data arrival event to specific DataReaders
subscriber->notify_datareaders();
}
Figure 7.8 Simple SubscriberListener

7.2 Subscribers
7-23
7. Receiving Data
7.2.7 Finding a Subscriber’s Related Entities
These Subscriber operations are useful for obtaining a handle to related entities:
❏ get_participant(): Gets the DomainParticipant with which a Subscriber was cre-
ated.
❏ lookup_datareader(): Finds a DataReader created by the Subscriber with a Topic of
a particular name. Note that if multiple DataReaders were created by the same
Subscriber with the same Top ic , any one of them may be returned by this method.
You can use this operation on a built-in Subscriber to access the builtin DataRead-
ers for the builtin topics. The built-in DataReader is created when this operation is
called on a builtin topic for the first time.
If you are going to modify the transport properties for the builtin DataReaders, do
so before using this operation. Builtin transports are implicitly registered when
the DomainParticipant is enabled or the first DataWriter/DataReader is created. To
ensure that builtin DataReaders receive all the discovery traffic, you should
lookup the DataReader before the DomainParticipant is enabled. Therefore the
suggested sequence when looking up builtin DataReaders is:
1. Create a disabled DomainParticipant (see Section 6.4.2).
2. If you want to use non-default values, modify the builtin transport properties
(see Section 13.5).
3. Call get_builtin_subscriber() (
see Section 14.2).
4. Call lookup_datareader().
5. Call enable() on the DomainParticipant (see Section 4.1.2).
❏ DDS_Subscriber_as_Entity(): This method is provided for C applications and is
necessary when invoking the parent class Entity methods on Subscribers. For
example, to call the Entity method get_status_changes() on a Subscriber, my_sub,
do the following:
DDS_Entity_get_status_changes(DDS_Subscriber_as_Entity(my_sub))
DDS_Subscriber_as_Entity() is not provided in the C++, C++/CLI, C# and Java
APIs because the object-oriented features of those languages make it unneces-
sary.

Chapter 7
7-24
7.2.8 Statuses for Subscribers
The status indicators for a Subscriber are the same as those available for its DataReaders,
with one additional status: DATA_ON_READERS (Section 7.2.8.1). The following sta-
tuses can be monitored by the SubscriberListener.
❏ DATA_ON_READERS Status (Section 7.2.8.1)
❏ DATA_AVAILABLE Status (Section 7.3.6.1)
❏ LIVELINESS_CHANGED Status (Section 7.3.6.4)
❏ REQUESTED_DEADLINE_MISSED Status (Section 7.3.6.5)
❏ REQUESTED_INCOMPATIBLE_QOS Status (Section 7.3.6.6)
❏ SAMPLE_LOST Status (Section 7.3.6.7)
❏ SAMPLE_REJECTED Status (Section 7.3.6.8)
❏ SUBSCRIPTION_MATCHED Status (Section 7.3.6.9)
You can access Subscriber status by using a SubscriberListener or its inherited
get_status_changes() operation (see Section 4.1.4), which can be used to explicitly poll
for the DATA_ON_READERS status of the Subscriber.
7.2.8.1 DATA_ON_READERS Status
The DATA_ON_READERS status, like the D ATA _ AVA I L A B L E status for DataReaders,
is a read communication status, which makes it somewhat different from other plain
communication statuses. (See Types of Communication Status (Section 4.3.1) for more
information on statuses and the difference between read and plain statuses.) In particu-
lar, there is no status-specific data structure; the status is either changed or not, there is
no additional associated information.
The DATA_ON_READERS status indicates that there is new data available for one or
more DataReaders that belong to this Subscriber. The DATA_AVAILABLE status for each
such DataReader will also be updated.
The DATA_ON_READERS status is reset (the corresponding bit in the bitmask is
turned off) when you call read/take (or one of the variations) on any of the DataReaders
that belong to the Subscriber. This is true even if the DataReader on which you call read/
take is not the same DataReader that caused the DATA_ON_READERS status to be set
in the first place. This status is also reset when you call notify_datareaders() on the Sub-
scriber, or after on_data_on_readers() is invoked.
If a SubscriberListener has both on_data_on_readers() and on_data_available() callbacks
enabled (by turning on both status bits), only on_data_on_readers() is called.

7.3 DataReaders
7-25
7. Receiving Data
7.3 DataReaders
To create a DataReader, you need a DomainParticipant, a Topic, and optionally, a Subscriber.
You need at least one DataReader for each Topic whose data samples you want to receive.
After you create a DataReader, you will be able to use the operations listed in Table 7.3.
You are likely to use many of these operations from within your DataReader’s Listener,
which is invoked when there are status changes or new data samples. For more details
on all operations, see the online documentation. The DataReaderListener is described in
Section 7.3.3.
DataReaders are created by using operations on a DomainParticipant or a Subscriber, as
described in Section 7.2.1. If you use the DomainParticipant’s operations, the DataReader
will belong to an implicit Subscriber that is automatically created by the middleware. If
you use a Subscriber’s operations, the DataReader will belong to that Subscriber. So either
way, the DataReader belongs to a Subscriber.
Note: Some operations cannot be used within a listener callback, see Restricted Opera-
tions in Listener Callbacks (Section 4.5.1).
Table 7.3 DataReader Operations
Purpose Operation Description Reference
Configuring
the
DataReader
enable Enables the DataReader. Section 4.1.2
get_qos Gets the QoS.
Section 7.3.7set_qos Modifies the QoS.
set_qos_with_profile Modifies the QoS based on a QoS profile.
get_listener Gets the currently installed Listener.
Section 7.3.3
set_listener Replaces the Listener.

Chapter 7
7-26
Accessing
Data
Samples with
“Read”
(Use
FooData-
Reader, see
Section 7.4.3)
read
Reads (copies) a collection of data samples from
the DataReader.
Section 7.4.3
read_instance
Identical to read, but all samples returned
belong to a single instance, which you specify as
a parameter.
Section
read_next_instance
Similar to read_instance, but the actual instance
is not directly specified as a parameter. Instead,
the samples will all belong to instance ordered
after the one previously read.
Section 7.4.3.5
read_next_instance_w_
condition
Accesses a collection of data samples of the next
instance that match a specific set of ReadCondi-
tions, from the DataReader.
Section 7.4.3.7
read_next_sample
Reads the next not-previously-accessed data
value from the DataReader.
Section 7.4.3.3
read_w_condition
Accesses a collection of data samples from the
DataReader that match specific ReadCondition cri-
teria.
Section 7.4.3.6
Accessing
Data
Samples with
“Take”
(Use
FooData-
Reader, see
Section 7.4.3)
take
Like read, but the samples are removed from
the DataReader’s receive queue.
Section 7.4.3
take_instance
Like read_instance, but the samples are
removed from the DataReader’s receive queue.
Section 7.4.3.4
take_next_instance
Like read_next_instance, but the samples are
removed from the DataReader’s receive queue.
Section 7.4.3.5
take_next_instance_w_
condition
Accesses (and removes) a collection of data
samples of the next instance that match a spe-
cific set of ReadConditions, from the DataReader.
Section 7.4.3.7
take_next_sample
Like read_next_sample, but the samples are
removed from the DataReader’s receive queue.
Section 7.4.3.3
take_w_condition
Accesses (and removes) a collection of data
samples from the DataReader that match specific
ReadCondition criteria.
Section 7.4.3.6
Table 7.3 DataReader Operations
Purpose Operation Description Reference

7.3 DataReaders
7-27
7. Receiving Data
Working
with Data
Samples and
FooData-
Reader
(Use
FooData-
Reader, see
Section 7.4.3)
narrow
A type-safe way to cast a pointer. This takes a
DDSDataReader pointer and ‘narrows’ it to a
‘FooDataReader’ where ‘Foo’ is the related data
type.
Section 7.4.1
return_loan
Returns buffers loaned in a previous read or
take call.
Section 7.4.2
get_key_value Gets the key for an instance handle. Section 7.3.8.4
lookup_instance
Gets the instance handle that corresponds to an
instance key.
Section 7.3.8.3
Checking
Status
get_liveliness_changed_
status
Gets LIVELINESS_CHANGED_STATUS
status.
Section 7.3.6
get_requested_deadline_
missed_status
Gets REQUESTED_DEADLINE_
MISSED_STATUS status.
get_requested_
incompatible_qos_status
Gets REQUESTED_INCOMPATIBLE_
QOS_STATUS status.
get_sample_lost_status Gets SAMPLE_LOST_STATUS status.
get_sample_rejected_
status
Gets SAMPLE_REJECTED_STATUS status.
get_subscription_matched
_status
Gets SUBSCRIPTION_MATCHED_STATUS sta-
tus.
get_status_changes
Gets a list of statuses that changed since last
time the application read the status or the listen-
ers were called.
Section 4.1.4
get_datareader_cache_
status
Gets DATA_READER_CACHE_STATUS status.
Section 7.3.4
Section 7.3.6
get_datareader_protocol_
status
Gets DATA_READER_PROTOCOL_
STATUS status.
get_matched_publication_
datareader_protocol_
status
Get the protocol status for this DataReader, per
matched publication identified by the
publication_handle.
Table 7.3 DataReader Operations
Purpose Operation Description Reference

Chapter 7
7-28
Navigating
Relationships
get_instance_handle
Returns the DDS_InstanceHandle_t associated
with the Entity.
Section 4.1.3
get_matched_publication_
data
Gets information on a publication with a match-
ing Topic and compatible QoS.
Section 7.3.8.1
get_matched_publications
Gets a list of publications that have a matching
Topic and compatible QoS. These are the publi-
cations currently associated with the DataReader.
get_subscriber Gets the Subscriber that created the DataReader.
Section 7.3.8.2
get_topicdescription Gets the Topic associated with the DataReader.
Working
with
Conditions
create_querycondition Creates a QueryCondition.
Section 4.6.7
create_readcondition Creates a ReadCondition.
delete_readcondition
Deletes a ReadCondition/QueryCondition
attached to the DataReader.
delete_contained_entities
Deletes all the ReadConditions/QueryConditions
that were created by means of the "create" oper-
ations on the DataReader.
Section 7.3.2.1
get_statuscondition
Gets the StatusCondition associated with the
Entity.
Section 4.6.8
Waiting for
Historical
Data
wait_for_historical_data
Waits until all "historical" (previously sent) data
is received. Only valid for Reliable DataReaders
with non-VOLATILE DURABILITY.
Section 7.3.5
Table 7.3 DataReader Operations
Purpose Operation Description Reference

7.3 DataReaders
7-29
7. Receiving Data
7.3.1 Creating DataReaders
Before you can create a DataReader, you need a DomainParticipant and a Topic.
DataReaders are created by calling create_datareader() or
create_datareader_with_profile()—these operations exist for DomainParticipants and
Subscribers. If you use the DomainParticipant to create a DataReader, it will belong to the
implicit Subscriber described in Section 7.2.1. If you use a Subscriber’s operations to cre-
ate a DataReader, it will belong to that Subscriber.
DDSDataReader* create_datareader(DDSTopicDescription *topic,
const DDS_DataReaderQos &qos,
DDSDataReaderListener *listener,
DDS_StatusMask mask);
DDSDataReader * create_datareader_with_profile (
DDSTopicDescription * topic,
const char * library_name,
const char * profile_name,
DDSDataReaderListener * listener,
DDS_StatusMask mask)
A QoS profile is way to use QoS settings from an XML file or string. With this approach,
you can change QoS settings without recompiling the application. For details, see
Chapter 15: Configuring QoS with XML.
topic The Topic to which the DataReader is subscribing. This must have been previously
created by the same DomainParticipant.
qos If you want the default QoS settings (described in the online documentation), use
DDS_DATAREADER_QOS_DEFAULT for this parameter (see Figure 7.9 on
page 7-30). If you want to customize any of the QosPolicies, supply a QoS struc-
ture (see Section 7.3.7).
Note: If you use DDS_DATAREADER_QOS_DEFAULT for the qos parameter, it
is not safe to create the DataReader while another thread may be simultaneously
calling the Subscriber’s set_default_datareader_qos() operation.
listener A DataReader’s Listener is where you define the callback routine that will be
notified when new data samples arrive. RTI Data Distribution Service also uses this
Listener to notify your application of specific events (status changes) that may
occur with respect to the DataReader. For more information, see Section 7.3.3 and
Section 7.3.6.

Chapter 7
7-30
The listener parameter is optional; you may use NULL instead. In that case, the
Subscriber’s Listener (or if that is NULL, the DomainParticipant’s Listener) will
receive the notifications instead. See Section 7.3.3 for more on DataReaderListeners.
mask This bit mask indicates which status changes will cause the Listener to be
invoked. The bits set in the mask must have corresponding callbacks imple-
mented in the Listener. If you use NULL for the Listener, use
DDS_STATUS_MASK_NONE for this parameter. If the Listener implements all
callbacks, use DDS_STATUS_MASK_ALL. For information on statuses, see Lis-
teners (Section 4.4).
library_name A QoS Library is a named set of QoS profiles. See QoS Libraries (Section
15.9).
profile_name A QoS profile groups a set of related QoS, usually one per entity. See QoS
Profiles (Section 15.8).
After you create a DataReader, you can use it to retrieve received data. See Section 7.4.
Note: When a DataReader is created, only those transports already registered are avail-
able to the DataReader. The builtin transports are implicitly registered when (a) the
DomainParticipant is enabled, (b) the first DataReader is created, or (c) you lookup a buil-
tin DataReader, whichever happens first.
Figure 7.9 shows an example of how to create a DataReader with default QosPolicies.
For more examples on how to create a DataWriter, see Configuring QoS Settings when
the DataReader is Created (Section 7.3.7.1)
Figure 7.9 Creating a DataReader with Default QosPolicies
// MyReaderListener is user defined, extends DDSDataReaderListener
DDSDataReaderListener *reader_listener = new MyReaderListener();
DataReader* reader = subscriber->create_datareader(topic,
DDS_DATAREADER_QOS_DEFAULT,
reader_listener,
DDS_STATUS_MASK_ALL);
if (reader == NULL) {
// ... error
}
// narrow it into your specific data type
FooDataReader* foo_reader = FooDataReader::narrow(reader);

7.3 DataReaders
7-31
7. Receiving Data
7.3.2 Deleting DataReaders
To delete a DataReader:
1. Delete any ReadConditions and QueryConditions that were created with the
DataReader. Use the DataReader’s delete_readcondition() operation to delete
them one at a time, or use the delete_contained_entities() operation
(Section 7.3.2.1) to delete them all at the same time.
DDS_ReturnCode_t delete_readcondition (DDSReadCondition *condition)
2. Delete the DataReader by using the Subscriber’s delete_datareader() operation
(Section 7.2.3).
Note: A DataReader cannot be deleted within its own reader listener callback, see
Restricted Operations in Listener Callbacks (Section 4.5.1).
To delete all of a Subscriber’s DataReaders, use the Subscriber’s
delete_contained_entities() operation (see Section 7.2.3.1).
7.3.2.1 Deleting Contained ReadConditions
The DataReader’s delete_contained_entities() operation deletes all the ReadConditions
and QueryConditions (Section 4.6.7) that were created by the DataReader.
DDS_ReturnCode_t delete_contained_entities ()
After this operation returns successfully, the application may delete the DataReader (see
Section 7.3.2).
7.3.3 Setting Up DataReaderListeners
DataReaders may optionally have Listeners. A DataReaderListener is a collection of call-
back methods; these methods are invoked by RTI Data Distribution Service when data
samples are received or when there are status changes for the DataReader.
Note: Some operations cannot be used within a listener callback, see Restricted Opera-
tions in Listener Callbacks (Section 4.5.1).
If you do not implement a DataReaderListener, the associated Subscriber’s Listener is used
instead. If that Subscriber does not have a Listener either, then the DomainParticipant’s Lis-
tener is used if one exists (see Section 7.2.5 and Section 8.3.5).
If you do not require asynchronous notification of data availability or status changes,
you do not need to set a Listener for the DataReader. In that case, you will need to period-
ically call one of the read() or take() operations described in Section 7.4 to access the
data that has been received.

Chapter 7
7-32
Listeners are typically set up when the DataReader is created (see Section 7.3.1). You can
also set one up after creation by using the DataReader’s get_listener() and set_listener()
operations. RTI Data Distribution Service will invoke a DataReader’s Listener to report the
status changes listed in Table 7.4 (if the Listener is set up to handle the particular status,
see Section 7.3.3).
Note that the same callbacks can be implemented in the SubscriberListener or DomainPar-
ticipantListener instead. There is only one SubscriberListener callback that takes prece-
dence over a DataReaderListener’s. An on_data_on_readers() callback in the
SubscriberListener (or DomainParticipantListener) takes precedence over the
on_data_available() callback of a DataReaderListener.
If the SubscriberListener implements an on_data_on_readers() callback, it will be
invoked instead of the DataReaderListener’s on_data_available() callback when new data
arrives. The on_data_on_readers() operation can in turn cause the on_data_available()
method of the appropriate DataReaderListener to be invoked by calling the Subscriber’s
notify_datareaders() operation. For more information on status and Listeners, see Lis-
teners (Section 4.4).
Figure 7.10 shows a DataReaderListener that simply prints the data it receives.
Table 7.4 DataReaderListener Callbacks
This DataReaderListener
callback... ...is triggered by a change in this status:
on_data_available()
DATA_AVAILABLE Status (Section 7.3.6.1)
on_liveliness_changed()
LIVELINESS_CHANGED Status (Section 7.3.6.4)
on_requested_deadline_missed()
REQUESTED_DEADLINE_MISSED Status (Section
7.3.6.5)
on_requested_incompatible_qos()
REQUESTED_INCOMPATIBLE_QOS Status (Section
7.3.6.6)
on_sample_lost()
SAMPLE_LOST Status (Section 7.3.6.7)
on_sample_rejected()
SAMPLE_REJECTED Status (Section 7.3.6.8)
on_subscription_matched()
SUBSCRIPTION_MATCHED Status (Section 7.3.6.9)

7.3 DataReaders
7-33
7. Receiving Data
class MyReaderListener : public DDSDataReaderListener {
public:
virtual void on_data_available(DDSDataReader* reader);
// don’t do anything for the other callbacks
};
void MyReaderListener::on_data_available(DDSDataReader* reader)
{
FooDataReader *Foo_reader = NULL;
FooSeq data_seq; // In C, sequences have to be initialized
DDS_SampleInfoSeq info_seq; // before use, see Section 7.4.4.
DDS_ReturnCode_t retcode;
int i;
// Must cast generic reader into reader of specific type
Foo_reader = FooDataReader::narrow(reader);
if (Foo_reader == NULL) {
printf("DataReader narrow error\n");
return;
}
retcode = Foo_reader->take(data_seq, info_seq,
DDS_LENGTH_UNLIMITED, DDS_ANY_SAMPLE_STATE,
DDS_ANY_VIEW_STATE, DDS_ANY_INSTANCE_STATE);
if (retcode == DDS_RETCODE_NO_DATA) {
return;
} else if (retcode != DDS_RETCODE_OK) {
printf("take error %d\n", retcode);
return;
}
for (i = 0; i < data_seq.length(); ++i) {
// the data may not be valid if the sample is meta information
// about the creation or deletion of an instance
if (info_seq[i].valid_data) {
FooTypeSupport::print_data(&data_seq[i]);
}
}
// RTI Data Distribution Service gave a pointer to internal memory via
// take(), must return the memory when finished processing the data
retcode = Foo_reader->return_loan(data_seq, info_seq);
if (retcode != DDS_RETCODE_OK) {
printf("return loan error %d\n", retcode);
}
}
Figure 7.10 Simple DataReaderListener

Chapter 7
7-34
7.3.4 Checking DataReader Status and StatusConditions
You can access individual communication status for a DataReader with the operations
shown in Table 7.5.
These methods are useful in the event that no Listener callback is set to receive notifica-
tions of status changes. If a Listener is used, the callback will contain the new status
information, in which case calling these methods is unlikely to be necessary.
The get_status_changes() operation provides a list of statuses that have changed since
the last time the status changes were ‘reset.’ A status change is reset each time the appli-
cation calls the corresponding get_*_status(), as well as each time RTI Data Distribution
Service returns from calling the Listener callback associated with that status.
For more on status, see Setting Up DataReaderListeners (Section 7.3.3), Statuses for
DataReaders (Section 7.3.6), and Listeners (Section 4.4).
Table 7.5 DataReader Status Operations
Use this operation... ...to retrieve this status:
get_datareader_cache_status
DATA_READER_CACHE_STATUS (Section
7.3.6.2)
get_datareader_protocol_status
DATA_READER_PROTOCOL_STATUS (Section
7.3.6.3)
get_matched_publication_
datareader_protocol_status
get_liveliness_changed_status
LIVELINESS_CHANGED Status (Section
7.3.6.4)
get_sample_lost_status
SAMPLE_LOST Status (Section 7.3.6.7)
get_sample_rejected_status
SAMPLE_REJECTED Status (Section 7.3.6.8)
get_requested_deadline_missed_status
REQUESTED_DEADLINE_MISSED Status (Sec-
tion 7.3.6.5)
get_requested_incompatible_qos_status
REQUESTED_INCOMPATIBLE_QOS Status
(Section 7.3.6.6)
get_subscription_match_status
SUBSCRIPTION_MATCHED Status (Section
7.3.6.9)
get_status_changes
All of the above
get_statuscondition
See StatusConditions (Section 4.6.8)

7.3 DataReaders
7-35
7. Receiving Data
7.3.5 Waiting for Historical Data
The wait_for_historical_data() operation waits (blocks) until all "historical" data is
received. "Historical" data means samples that were written before the DataReader
joined the domain.
This operation is intended only for DataReaders that have:
❏ DURABILITY QosPolicy (Section 6.5.6) kind set to TRANSIENT_LOCAL (not VOL-
ATILE)
❏ RELIABILITY QosPolicy (Section 6.5.17) kind set to RELIABLE.
Calling wait_for_historical_data() on a non-reliable DataReader will always
return immediately, since RTI Data Distribution Service will never deliver histori-
cal data to non-reliable DataReaders.
As soon as an application enables a non-VOLATILE DataReader, it will start receiving
both "historical" data as well as any new data written by matching DataWriters. If you
want the subscribing application to wait until all "historical" data is received, use this
operation:
DDS_ReturnCode_t wait_for_historical_data
(const DDS_Duration_t & max_wait)
The wait_for_historical_data() operation blocks the calling thread until either all "his-
torical" data is received, or else duration specified by the max_wait parameter elapses,
whichever happens first. A return value of OK indicates that all the "historical" data was
received; a return value of "TIMEOUT" indicates that max_wait elapsed before all the
data was received.
7.3.6 Statuses for DataReaders
There are several types of statuses available for a DataReader. You can use the
get_*_status() operations (Section 7.3.4) to access them, use a DataReaderListener
(Section 7.3.3) to listen for changes in their values (for those statuses that have Listen-
ers), or use a StatusCondition and a WaitSet (Section 4.6.8) to wait for changes. Each sta-
tus has an associated data structure and is described in more detail in the following
sections.
❏ DATA_AVAILABLE Status (Section 7.3.6.1)
❏ DATA_READER_CACHE_STATUS (Section 7.3.6.2)
❏ DATA_READER_PROTOCOL_STATUS (Section 7.3.6.3)

Chapter 7
7-36
❏ LIVELINESS_CHANGED Status (Section 7.3.6.4)
❏ REQUESTED_DEADLINE_MISSED Status (Section 7.3.6.5)
❏ REQUESTED_INCOMPATIBLE_QOS Status (Section 7.3.6.6)
❏ SAMPLE_LOST Status (Section 7.3.6.7)
❏ SAMPLE_REJECTED Status (Section 7.3.6.8)
❏ SUBSCRIPTION_MATCHED Status (Section 7.3.6.9)
7.3.6.1 DATA_AVAILABLE Status
This status indicates that new data is available for the DataReader. In most cases, this
means that one new sample has been received. However, there are situations in which
more than one samples for the DataReader may be received before the
D ATA _ AVA I L A B L E status changes. For example, if the DataReader has the DURABIL-
ITY QosPolicy (Section 6.5.6) set to be non-VOLATILE, then the DataReader may receive
a batch of old data samples all at once. Or if data is being received reliably from
DataWriters, RTI Data Distribution Service may present several samples of data simulta-
neously to the DataReader if they have been originally received out of order.
A change to this status also means that the DATA_ON_READERS status is changed for
the DataReader’s Subscriber.
This status is reset when you call read(), take(), or one of their variations.
Unlike most other statuses, this status (as well as DATA_ON_READERS for Subscribers)
is a read communication status. See Section 7.2.8 and Section 4.3.1 for more information on
read communication statuses.
The DataReaderListener’s on_data_available() callback is invoked when this status
changes, unless the SubscriberListener (Section 7.2.5) or DomainParticipantListener
(Section 8.3.5) has implemented an on_data_on_readers() callback. In that case,
on_data_on_readers() will be invoked instead.
7.3.6.2 DATA_READER_CACHE_STATUS
This status keeps track of the number of samples in the reader's cache.
This status does not have an associated Listener. You can access this status by calling the
DataReader’s get_datareader_cache_status() operation, which will return the status
structure described in Table 7.6.

7.3 DataReaders
7-37
7. Receiving Data
7.3.6.3 DATA_READER_PROTOCOL_STATUS
The status of a DataReader’s internal protocol related metrics (such as the number of
samples received, filtered, rejected) and the status of wire protocol traffic. The structure
for this status appears in Table 7.7 on page 7-38.
This status does not have an associated Listener. You can access this status by calling the
following operations on the DataReader (all of which return the status structure
described in Table 7.7):
❏ get_datareader_protocol_status() returns the sum of the protocol status for all
the matched publications for the DataReader.
❏ get_matched_publication_datareader_protocol_status() returns the protocol
status of a particular matched publication, identified by a publication_handle.
Note: Status for a remote entity is only kept while the entity is alive. Once a remote
entity is no longer alive, its status is deleted. If you try to get the matched subscription
status for a remote entity that is no longer alive, the ‘get status’ call will return an error.
7.3.6.4 LIVELINESS_CHANGED Status
This status indicates that the liveliness of one or more matched DataWriters has changed
(i.e., one or more DataWriters has become alive or not alive). The mechanics of determin-
ing liveliness between a DataWriter and a DataReader is specified in their LIVELINESS
QosPolicy (Section 6.5.11)
.
The structure for this status appears in Table 7.8.
The DataReaderListener’s on_liveliness_changed() callback is invoked when this status
changes. You can also retrieve the value by calling the DataReader’s
get_liveliness_changed_status() operation.
This status is reciprocal to the RELIABLE_READER_ACTIVITY_CHANGED Status
(DDS Extension) (Section 6.3.5.8) for a DataWriter.
Table 7.6 DDS_DataReaderCacheStatus
Type Field Name Description
DDS_Long sample_count_peak
Highest number of samples in the
DataReader’s queue
over the lifetime of the DataReader.
DDS_Long sample_count
Current number of samples in the
DataReader’s queue.
Includes samples that may not yet be available to be read
or taken by the user due to samples being received out of
order or settings in the PRESENTATION QosPolicy (Sec-
tion 6.4.6).

Chapter 7
7-38
Table 7.7 DDS_DataReaderProtocolStatus
Type Field Name Description
DDS_LongLong
received_sample_count
The number of user samples from a remote
DataWriter received for the first time by a
local DataReader.
received_sample_count_
change
The incremental change in the number of
user samples from a remote DataWriter
received for the first time by a local
DataReader since the last time the status was
read.
received_sample_bytes
The number of bytes of user samples from a
remote DataWriter received for the first time
by a local DataReader.
received_sample_bytes_
change
The incremental change in the number of
bytes of user samples from a remote
DataWriter received for the first time by a
local DataReader since the last time the sta-
tus was read.
DDS_LongLong
duplicate_sample_count
The number of samples from a remote
DataWriter received, not for the first time, by
a local DataReader.
duplicate_sample_count_
change
The incremental change in the number of
samples from a remote DataWriter received,
not for the first time, by a local DataReader
since the last time the status was read.
duplicate_sample_bytes
The number of bytes of samples from a
remote DataWriter received, not for the first
time, by a local DataReader.
duplicate_sample_bytes_
change
The incremental change in the number of
bytes of samples from a remote DataWriter
received, not for the first time, by a local
DataReader since the last time the status was
read.

7.3 DataReaders
7-39
7. Receiving Data
DDS_LongLong
filtered_sample_count
The number of user samples filtered by the
local DataReader due to ContentFilteredTop-
ics or Time-Based Filter.
filtered_sample_count_
change
The incremental change in the number of
user samples filtered by the local DataReader
due to Content-FilteredTopics or Time-
Based Filter since the last time the status
was read.
filtered_sample_bytes
The number of bytes of user samples fil-
tered by the local DataReader due to Con-
tentFilteredTopics or Time-Based Filter.
filtered_sample_bytes_
change
The incremental change in the number of
bytes of user samples filtered by the local
DataReader due to ContentFilteredTopics or
Time-Based Filter since the last time the sta-
tus was read.
DDS_LongLong
received_heartbeat_count
The number of Heartbeats from a remote
DataWriter received by a local DataReader.
received_heartbeat_count_
change
The incremental change in the number of
Heartbeats from a remote DataWriter
received by a local DataReader since the last
time the status was read.
received_heartbeat_bytes
The number of bytes of Heartbeats from a
remote DataWriter received by a local
DataReader.
received_heartbeat_bytes_
change
The incremental change in the number of
bytes of Heartbeats from a remote
DataWriter received by a local DataReader
since the last time the status was read.
Table 7.7 DDS_DataReaderProtocolStatus
Type Field Name Description
Chapter 7
7-40
DDS_LongLong
sent_ack_count
The number of ACKs sent from a local
DataReader to a matching remote DataWriter.
sent_ack_count_change
The incremental change in the number of
ACKs sent from a local DataReader to a
matching remote DataWriter since the last
time the status was read.
sent_ack_bytes
The number of bytes of ACKs sent from a
local DataReader to a matching remote
DataWriter.
sent_ack_bytes_change
The incremental change in the number of
bytes of ACKs sent from a local DataReader
to a matching remote DataWriter since the
last time the status was read.
DDS_LongLong
sent_nack_count
The number of NACKs sent from a local
DataReader to a matching remote DataWriter.
sent_nack_count_change
The incremental change in the number of
NACKs sent from a local DataReader to a
matching remote DataWriter since the last
time the status was read.
sent_nack_bytes
The number of bytes of NACKs sent from a
local DataReader to a matching remote
DataWriter.
sent_nack_bytes_change
The incremental change in the number of
bytes of NACKs sent from a local
DataReader to a matching remote DataWriter
since the last time the status was read.
Table 7.7 DDS_DataReaderProtocolStatus
Type Field Name Description

7.3 DataReaders
7-41
7. Receiving Data
DDS_LongLong
received_gap_count
The number of GAPs received from remote
DataWriter to this DataReader.
received_gap_count_change
The incremental change in the number of
GAPs received from remote DataWriter to
this DataReader since the last time the status
was read.
received_gap_bytes
The number of bytes of GAPs received from
remote DataWriter to this DataReader.
received_gap_bytes_change
The incremental change in the number of
bytes of GAPs received from remote
DataWriter to this DataReader since the last
time the status was read.
DDS_LongLong
rejected_sample_count
The number of times a sample is rejected for
unanticipated reasons in the receive path.
rejected_sample_
count_change
The incremental change in the number of
times a sample is rejected for unanticipated
reasons in the receive path since the last
time the status was read.
DDS_
SequenceNumber_t
first_available_sample_
sequence_number
Sequence number of the first available sam-
ple in a matched DataWriter's reliability
queue.
Applicable only when retrieving matched
DataWriter statuses.
last_available_sample_
sequence_number
Sequence number of the last available sam-
ple in a matched DataWriter's reliability
queue.
Applicable only when retrieving matched
DataWriter statuses.
last_committed_sample_
sequence_number
Sequence number of the last committed
sample (i.e. available to be read or taken) in
a matched DataWriter's reliability queue.
Applicable only when retrieving matched
DataWriter statuses.
Table 7.7 DDS_DataReaderProtocolStatus
Type Field Name Description

Chapter 7
7-42
7.3.6.5 REQUESTED_DEADLINE_MISSED Status
This status indicates that the DataReader did not receive a new sample for an data-
instance within the time period set in the DataReader’s DEADLINE QosPolicy (Section
6.5.4)
. For non-keyed Topics, this simply means that the DataReader did not receive data
within the DEADLINE period. For keyed Top ic s, this means that for one of the data-
instances that the DataReader was receiving, it has not received a new sample within the
DEADLINE period. For more information about keys and instances, see Section 2.2.2.
The structure for this status appears in Table 7.9.
The DataReaderListener’s on_requested_deadline_missed() callback is invoked when
this status changes. You can also retrieve the value by calling the DataReader’s
get_requested_deadline_missed_status() operation.
DDS_Long uncommitted_sample_count
Number of received samples that are not yet
available to be read or taken due to being
received out of order.
Applicable only when retrieving matched
DataWriter statuses.
Table 7.8 DDS_LivelinessChangedStatus
Type Field Name Description
DDS_Long
alive_count
Number of matched DataWriters that are currently
alive.
not_alive_count
Number of matched DataWriters that are not currently
alive.
alive_count_change
The change in the alive_count since the last time the
Listener was called or the status was read.
not_alive_count_change
The change in the not_alive_count since the last time
the Listener was called or the status was read.
DDS_Instance
Handle_t
last_publication_handle A handle to the last DataWriter to change its liveliness.
Table 7.7 DDS_DataReaderProtocolStatus
Type Field Name Description

7.3 DataReaders
7-43
7. Receiving Data
7.3.6.6 REQUESTED_INCOMPATIBLE_QOS Status
A change to this status indicates that the DataReader discovered a DataWriter for the
same Topic, but that DataReader had requested QoS settings incompatible with this
DataWriter’s offered QoS.
The structure for this status appears in Table 7.10.
The DataReaderListener’s on_requested_incompatible_qos() callback is invoked when
this status changes. You can also retrieve the value by calling the DataReader’s
get_requested_incompatible_qos_status() operation.
Table 7.9 DDS_RequestedDeadlineMissedStatus
Type Field Name Description
DDS_Long
total_count
Cumulative number of times that the deadline was vio-
lated for any instance read by the DataReader.
total_count_change
The change in total_count since the last time the Lis-
tener was called or the status was read.
DDS_Instance
Handle_t
last_instance_handle
Handle to the last data-instance in the DataReader for
which a requested deadline was missed.
Table 7.10 DDS_RequestedIncompatibleQosStatus
Type Field Name Description
DDS_Long total_count
Cumulative number of times the DataReader
discovered a DataWriter for the same Topic
with an offered QoS that is incompatible with
that requested by the DataReader.
DDS_Long total_count_change
The change in total_count since the last time
the Listener was called or the status was read.
DDS_QosPolicyId_t last_policy_id
The ID of the QosPolicy that was found to be
incompatible the last time an incompatibility
was detected. (Note: if there are multiple
incompatible policies, only one of them is
reported here.)
DDS_QosPolicyCountSeq policies
A list containing—for each policy—the total
number of times that the DataReader discov-
ered a DataWriter for the same Topic with a
offered QoS that is incompatible with that
requested by the DataReader.
Chapter 7
7-44
7.3.6.7 SAMPLE_LOST Status
This status indicates that one or more samples written by a matched DataWriter have
failed to be received.
For a DataReader, when there are insufficient resources to accept incoming samples of
data, samples may be dropped by the receiving application. Those samples are consid-
ered to be REJECTED (see Section 7.3.6.8). But DataWriters are limited in the number of
published data samples that they can store, so that if a DataWriter continues to publish
data samples, new data may overwrite old data that have not yet been received by the
DataReader. The samples that are overwritten can never be resent to the DataReader and
thus are considered to be lost.
This status applies to reliable and best-effort DataReaders, see the RELIABILITY QosPol-
icy (Section 6.5.17).
The structure for this status appears in Table 7.9.
The DataReaderListener’s on_sample_lost() callback is invoked when this status changes.
You can also retrieve the value by calling the DataReader’s get_sample_lost_status()
operation.
7.3.6.8 SAMPLE_REJECTED Status
This status indicates that one or more samples received from a matched DataWriter have
been dropped by the DataReader because a resource limit would have been exceeded.
For example, if the receive queue is full, the number of samples in the queue is equal to
the max_samples parameter of the RESOURCE_LIMITS QosPolicy (Section 6.5.18).
The structure for this status appears in Table 7.12. The reason the sample was rejected
appears in the last_reason field. The possible values are listed in Table 7.13.
The DataReaderListener’s on_sample_rejected() callback is invoked when this status
changes. You can also retrieve the value by calling the DataReader’s
get_sample_rejected_status() operation.
Table 7.11 DDS_SampleLostStatus
Type Field Name Description
DDS_Long
total_count
Cumulative count of all the samples that have been lost,
across all instances of data written for the Topic.
total_count_change
The incremental number of samples lost since the last time
the Listener was called or the status was read.
7.3 DataReaders
7-45
7. Receiving Data
Table 7.12 DDS_SampleRejectedStatus
Type Field Name Description
DDS_Long
total_count
Cumulative count of all the samples that
have been rejected by the DataReader.
total_count_change
The incremental number of samples
rejected since the last time the Listener
was called or the status was read.
current_count
The current number of writers with
which the DataReader is matched.
current_count_change
The change in current_count since the
last time the Listener was called or the
status was read.
DDS_SampleRejectedStatus
Kind
last_reason
Reason for rejecting the last sample. See
Table 7.13.
DDS_InstanceHandle_t last_instance_handle
Handle to the data-instance for which the
last sample was rejected.
Table 7.13 DDS_SampleRejectedStatusKind
Reason Kind Description Related QosPolicy
DDS_NOT_REJECTED Sample was accepted.
DDS_REJECTED_BY_
INSTANCE_LIMIT
A resource limit on the number
of instances that can be handled
at the same time by the
DataReader was reached.
RESOURCE_LIMITS QosPolicy
(Section 6.5.18)
DDS_REJECTED_BY_
REMOTE_WRITERS_LIMIT
A resource limit on the number
of DataWriters from which a
DataReader may read was
reached.
DATA_READER_RESOURCE_
LIMITS QosPolicy (DDS Exten-
sion) (Section 7.6.2)
DDS_REJECTED_BY_
REMOTE_WRITERS_PER_
INSTANCE_LIMIT
A resource limit on the number
of DataWriters for a single
instance from which a
DataReader may read was
reached.
DATA_READER_RESOURCE_
LIMITS QosPolicy (DDS Exten-
sion) (Section 7.6.2)
DDS_REJECTED_BY_
SAMPLES_LIMIT
A resource limit on the total
number of samples was reached.
RESOURCE_LIMITS QosPolicy
(Section 6.5.18)
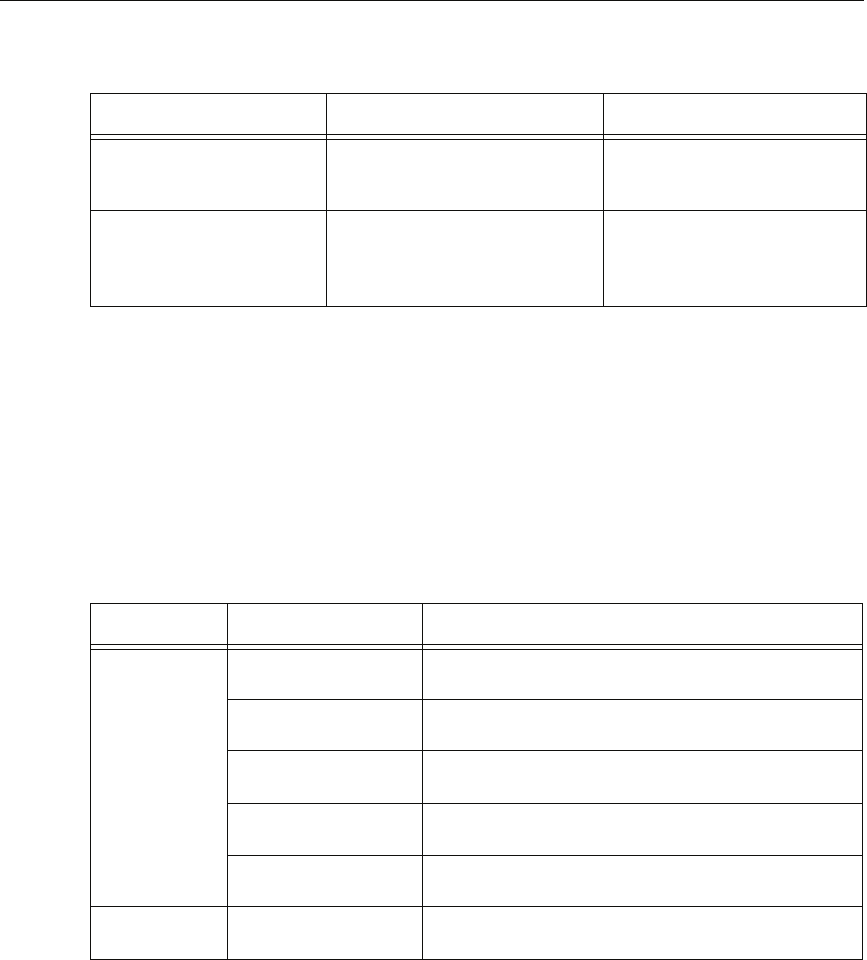
Chapter 7
7-46
7.3.6.9 SUBSCRIPTION_MATCHED Status
A change to this status indicates that the DataReader discovered a matching DataWriter.
A ‘match’ occurs only if the DataReader and DataWriter have the same Topic, same data
type (implied by having the same To pi c), and compatible QosPolicies. In addition, if user
code has directed RTI Data Distribution Service to ignore certain DataWriters, then those
DataWriters will never be matched. See Section 14.4.2 for more on setting up a Domain-
Participant to ignore specific DataWriters.
The structure for this status appears in Table 7.14.
The DataReaderListener’s on_subscription_matched() callback is invoked when this sta-
tus changes. You can also retrieve the value by calling the DataReader’s
get_subscription_match_status() operation.
DDS_REJECTED_BY_
SAMPLES_PER_
INSTANCE_LIMIT
A resource limit on the number
of samples per instance was
reached.
RESOURCE_LIMITS QosPolicy
(Section 6.5.18)
DDS_REJECTED_BY_
SAMPLES_PER_
REMOTE_WRITER_LIMIT
A resource limit on the number
of samples that a DataReader may
store from a specific DataWriter
was reached.
DATA_READER_RESOURCE_
LIMITS QosPolicy (DDS Exten-
sion) (Section 7.6.2)
Table 7.13 DDS_SampleRejectedStatusKind
Reason Kind Description Related QosPolicy
Table 7.14 DDS_SubscriptionMatchedStatus
Type Field Name Description
DDS_Long
total_count
Cumulative number of times the DataReader discov-
ered a "match" with a DataWriter.
total_count_change
The change in total_count since the last time the Lis-
tener was called or the status was read.
current_count
The number of DataWriters currently matched to the
concerned DataReader.
current_count_change
The change in current_count since the last time the lis-
tener was called or the status was read.
current_count_peak
The highest value that current_count has reached
until now.
DDS_Instance
Handle_t
last_publication_
handle
Handle to the last DataWriter that matched the
DataReader causing the status to change.

7.3 DataReaders
7-47
7. Receiving Data
7.3.7 Setting DataReader QosPolicies
A DataReader’s QosPolicies control its behavior. Think of QosPolicies as the ‘properties’
for the DataReader. The DDS_DataReaderQos structure has the following format:
struct DDS_DataReaderQos {
DDS_DurabilityQosPolicy durability;
DDS_DeadlineQosPolicy deadline;
DDS_LatencyBudgetQosPolicy latency_budget;
DDS_LivelinessQosPolicy liveliness;
DDS_ReliabilityQosPolicy reliability;
DDS_DestinationOrderQosPolicy destination_order;
DDS_HistoryQosPolicy history;
DDS_ResourceLimitsQosPolicy resource_limits;
DDS_UserDataQosPolicy user_data;
DDS_TimeBasedFilterQosPolicy time_based_filter;
DDS_ReaderDataLifecycleQosPolicy reader_data_lifecycle;
// Extensions to the DDS standard:
DDS_DataReaderResourceLimitsQosPolicy reader_resource_limits;
DDS_DataReaderProtocolQosPolicy protocol;
DDS_TransportSelectionQosPolicy transport_selection;
DDS_TransportUnicastQosPolicy unicast;
DDS_TransportMulticastQosPolicy multicast;
DDS_TypeSupportQosPolicy type_support;
DDS_PropertyQosPolicy property;
};
Note:
set_qos() cannot always be used within a listener callback, see Restricted Opera-
tions in Listener Callbacks (Section 4.5.1).
Table 7.15 summarizes the meaning of each policy. (They appear alphabetically in the
table.) For information on why you would want to change a particular QosPolicy, see the
referenced section. For defaults and valid ranges, please refer to the online documenta-
tion.
For a DataReader to communicate with a DataWriter, their corresponding QosPolicies
must be compatible. For QosPolicies that apply both to the DataWriter and the
DataReader, the setting in the DataWriter is considered what the DataWriter “offers” and
the setting in the DataReader is what the DataReader “requests.” Compatibility means
that what is offered by the DataWriter equals or surpasses what is requested by the
DataReader. See QoS Requested vs. Offered Compatibility—the RxO Property (Section
4.2.1).

Chapter 7
7-48
Table 7.15 DataReader QosPolicies
QosPolicy Description
DataReaderProtocol
This QosPolicy configures the DDS on-the-network protocol, RTPS. See
Section 7.6.1.
DataReaderResourceLimits
Various settings that configure how DataReaders allocate and use physical
memory for internal resources. See Section 7.6.2.
Deadline
For a DataReader, specifies the maximum expected elapsed time between
arriving data samples.
For a DataWriter, specifies a commitment to publish samples with no greater
elapsed time between them.
See Section 6.5.4.
DestinationOrder
Controls how RTI Data Distribution Service will deal with data sent by multi-
ple DataWriters for the same topic. Can be set to "by reception timestamp" or
to "by source timestamp". See Section 6.5.5.
Durability
Specifies whether or not RTI Data Distribution Service will store and deliver
data that were previously published to new DataReaders. See Section 6.5.6.
History
Specifies how much data must to stored by RTI Data Distribution Servicefor
the DataWriter or DataReader. This QosPolicy affects the RELIABILITY
QosPolicy (Section 6.5.17) as well as the DURABILITY QosPolicy (Section
6.5.6). See Section 6.5.8.
LatencyBudget
Suggestion to DDS on how much time is allowed to deliver data. See
Section 6.5.9.
Liveliness
Specifies and configures the mechanism that allows DataReaders to detect
when DataWriters become disconnected or "dead." See Section 6.5.11.
Property
Stores name/value (string) pairs that can be used to configure certain param-
eters of RTI Data Distribution Service that are not exposed through formal QoS
policies. It can also be used to store and propagate application-specific
name/value pairs, which can be retrieved by user code during discovery. See
Section 6.5.15.
ReaderDataLifeCycle
Controls how a DataReader manages the lifecycle of the data that it has
received. See Section 7.6.3.
Reliability
Specifies whether or not DDS will deliver data reliably. See Section 6.5.17.
ResourceLimits
Controls the amount of physical memory allocated for DDS entities, if
dynamic allocations are allowed, and how they occur. Also controls memory
usage among different instance values for keyed topics. See Section 6.5.18.
TimeBasedFilter
Set by a DataReader to limit the number of new data values received over a
period of time. See Section 7.6.4.

7.3 DataReaders
7-49
7. Receiving Data
Some of the policies may be changed after the DataReader has been created. This allows
the application to modify the behavior of the DataReader while it is in use. To modify the
QoS of an existing DataReader, use the get_qos() and set_qos() operations on the
DataReader. This is a general pattern for all DDS Entities, described in more detail in
Section 4.1.7.3.
7.3.7.1 Configuring QoS Settings when the DataReader is Created
As described in Creating DataReaders (Section 7.3.1), there are different ways to create a
DataReader, depending on how you want to specify its QoS (with or without a QoS Pro-
file).
❏ In Figure 7.9 on page 7-30, we saw an example of how to create a DataReader
with default QosPolicies by using the special constant,
DDS_DATAREADER_QOS_DEFAULT, which indicates that the default QoS
values for a DataReader should be used. The default DataReader QoS values are
configured in the Publisher or DomainParticipant; you can change them with
set_default_datareader_qos() or set_default_datareader_qos_with_profile().
Then any DataReaders created with the Subscriber will use the new default values.
As described in Section 4.1.7, this is a general pattern that applies to the con-
struction of all DDS Entities.
TransportMulticast
Specifies the multicast address on which a DataReader wants to receive its
data. Can specify a port number as well as a subset of the available transports
with which to receive the multicast data. See Section 7.6.5.
TransportSelection
Allows you to select which physical transports a DataWriter or DataReader
may use to send or receive its data. See Section 6.5.20.
TransportUnicast
Specifies a subset of transports and port number that can be used by an
Entity to receive data. See Section 6.5.21.
TypeSupport
Used to attach application-specific value(s) to a DataWriter or DataReader.
These values are passed to the serialization or deserialization routine of the
associated data type. See Section 6.5.22.
UserData
Along with Topic Data QosPolicy and Group Data QosPolicy, used to attach
a buffer of bytes to RTI Data Distribution Service's discovery meta-data. See
Section 6.5.23.
Table 7.15 DataReader QosPolicies
QosPolicy Description

Chapter 7
7-50
❏ To create a DataReader with non-default QoS without using a QoS Profile, see the
example code in Figure 7.11 on page 7-50. It uses the Publisher’s
get_default_reader_qos() method to initialize a DDS_DataReaderQos structure.
Then, the policies are modified from their default values before the structure is
used in the create_datareader() method.
❏ You can also create a DataReader and specify its QoS settings via a QoS Profile. To
do so, you will call create_datareader_with_profile(), as seen in Figure 7.12 on
page 7-51.
❏ If you want to use a QoS profile, but then make some changes to the QoS before
creating the DataReader, call get_datareader_qos_from_profile() and
create_datareader() as seen in Figure 7.13 on page 7-51.
For more information, see Creating DataReaders (Section 7.3.1) and Chapter 15: Config-
uring QoS with XML.
Figure 7.11 Creating a DataReader with Modified QosPolicies (not from a profile)
DDS_DataReaderQos reader_qos;
1
// initialize reader_qos with default values
subscriber->get_default_datareader_qos(reader_qos);
// make QoS changes here
reader_qos.history.depth = 5;
// Create the reader with modified qos
DDSDataReader * reader
= subscriber->create_datareader( topic,
reader_qos,
NULL, DDS_STATUS_MASK_NONE);
if (reader == NULL) {
// ... error
}
// narrow it for your specific data type
FooDataReader* foo_reader = FooDataReader::narrow(reader);
1. Note: In C, you must initialize the QoS structures before they are used, see Section 4.2.2.

7.3 DataReaders
7-51
7. Receiving Data
// Create the datareader
DDSDataReader * reader =
subscriber->create_datareader_with_profile(
topic,
“MyReaderLibrary”,
“MyReaderProfile”,
NULL, DDS_STATUS_MASK_NONE);
if (reader == NULL) {
// ... error
};
// narrow it for your specific data type
FooDataReader* foo_reader = FooDataReader::narrow(reader);
Figure 7.12 Creating a DataReader with a QoS Profile
DDS_DataReaderQos reader_qos;
1
// Get reader QoS from profile
retcode = factory->get_datareader_qos_from_profile(
reader_qos,
“ReaderProfileLibrary”,
“ReaderProfile”);
if (retcode != DDS_RETCODE_OK) {
// handle error
}
// Makes QoS changes here
reader_qos.history.depth = 5;
DDSDataReader * reader = subscriber->create_datareader(
topic,
reader_qos,
NULL, DDS_STATUS_MASK_NONE);
if (reader == NULL) {
// handle error
}
1. Note: In C, you must initialize the QoS structures before they are used, see Section 4.2.2.
Figure 7.13
Getting QoS Values from a Profile, Changing QoS Values, Creating a DataReader with
Modified QoS Values

Chapter 7
7-52
7.3.7.2 Changing QoS Settings After the DataReader Has Been Created
There are 2 ways to change an existing DataReader’s QoS after it is has been created—
again depending on whether or not you are using a QoS Profile.
❏ To change QoS programmatically (that is, without using a QoS Profile), use
get_qos() and set_qos(). See the example code in Figure 7.14. It retrieves the cur-
rent values by calling the DataReader’s get_qos() operation. Then it modifies the
value and calls set_qos() to apply the new value. Note, however, that some
QosPolicies cannot be changed after the DataReader has been enabled—this
restriction is noted in the descriptions of the individual QosPolicies.
❏ You can also change a DataReader’s (and all other Entities’) QoS by using a QoS
Profile and calling set_qos_with_profile(). For an example, see Figure 7.15. For
more information, see Chapter 15: Configuring QoS with XML.
DDS_DataReaderQos reader_qos;
1
// Get current QoS.
if (datareader->get_qos(reader_qos) != DDS_RETCODE_OK) {
// handle error
}
// Makes QoS changes here
reader_qos.history.depth = 5;
// Set the new QoS
if (datareader->set_qos(reader_qos) != DDS_RETCODE_OK ) {
// handle error
}
1. For the C API, you need to use DDS_ParticipantQos_INITIALIZER or DDS_ParticipantQos_initialize().
See Special QosPolicy Handling Considerations for C (Section 4.2.2)
Figure 7.14
Changing the QoS of an Existing DataReader (without a QoS Profile)
retcode = datareader->set_qos_with_profile(
“ReaderProfileLibrary”,”ReaderProfile”);
if (retcode != DDS_RETCODE_OK) {
// handle error
}
Figure 7.15 Changing the QoS of an Existing DataReader with a QoS Profile

7.3 DataReaders
7-53
7. Receiving Data
7.3.7.3 Using a Topic’s QoS to Initialize a DataWriter’s QoS
Several DataReader QosPolicies can also be found in the QosPolicies for To pi cs (see
Section 5.1.3). The QosPolicies set in the Topic do not directly affect the DataReaders (or
DataWriters) that use that Topic. In many ways, some QosPolicies are a Topic-level con-
cept, even though the DDS standard allows you to set different values for those policies
for different DataReaders and DataWriters of the same Topic. Thus, the policies in the
DDS_TopicQos structure exist as a way to help centralize and annotate the intended or
suggested values of those QoSs. RTI Data Distribution Service does not check to see if the
actual policies set for a DataReader is aligned with those set in the Top ic to which it is
bound.
There are many ways to use the QosPolicies’ values set in the Topic when setting the
QosPolicies’ values in a DataReader. The most straight forward way is to get the values
of policies directly from the Topic and use them in the policies for the DataReader.
Figure 6.17 on page 6-56 shows an example of how to this for a DataWriter; the pattern
applies to DataReaders as well.
The Subscriber’s copy_from_topic_qos() operation can be used to copy all the common
policies from the Topic QoS to a DataReaderQoS, as illustrated in Figure 6.18 on page 6-
57 for DataWriters.
The special macro, DDS_DATAREADER_QOS_USE_TOPIC_QOS, can be used to
indicate that the DataReader should be created with the QoS that results from modifying
the default DataReader QoS with the values specified by the Topic. See Figure 6.19 on
page 6-58 and Figure 6.20 on page 6-58 for examples involving DataWriters. The same
pattern applies to DataReaders. For more information on the use and manipulation of
QoS, see Section 4.1.7.
7.3.8 Navigating Relationships Among Entities
7.3.8.1 Finding Matching Publications
The following DataReader operations can be used to get information about the DataWrit-
ers that will send data to this DataReader.
❏ get_matched_publications()
❏ get_matched_publication_data()
The get_matched_publications() operation will return a sequence of handles to
matched DataWriters. You can use these handles in the get_matched_publication_data()
method to get information about the DataWriter such as the values of its QosPolicies.

Chapter 7
7-54
Note that DataWriter that have been ignored using the DomainParticipant’s
ignore_publication() operation are not considered to be matched even if the DataWriter
has the same Topic and compatible QosPolicies. Thus, they will not be included in the
list of DataWriters returned by get_matched_publications(). See Section 14.4.2 for more
on ignore_publication().
You can also get the DATA_READER PROTOCOL_STATUS for matching publications
with get_matched_publication_datareader_protocol_status() (see Section 7.3.6.3).
Notes:
❏ Status/data for a matched publication is only kept while the matched publica-
tion is alive. Once a matched publication is no longer alive, its status is deleted. If
you try to get the status/data for a matched publication that is no longer alive,
the 'get data' or 'get status' call will return an error.
❏ The get_matched_publication_data() operation does not retrieve the type_code
or property fields from builtin-topic data structures. This information is avail-
able through the on_data_available() callback (if a DataReaderListener is
installed on the PublicationBuiltinTopicDataDataReader).
7.3.8.2 Finding a DataReader’s Related Entities
These DataReader operations are useful for obtaining a handle to various related entities:
❏ get_subscriber()
❏ get_topicdescription()
The get_subscriber() operation returns the Subscriber that created the DataReader.
get_topicdescription() returns the Topic with which the DataReader is associated.
7.3.8.3 Looking Up an Instance Handle
Some operations, such as read_instance() and take_instance(), take an instance_handle
parameter. If you need to get such as handle, you can call the lookup_instance() opera-
tion, which takes an instance as a parameter and returns a handle to that instance.
7.3.8.4 Getting the Key Value for an Instance
If you have a handle to a data-instance, you can use the FooDataReader’s
get_key_value() operation to retrieve the key for that instance. The value of the key is
decomposed into its constituent fields and returned in a Foo structure. For information
on keys and keyed data types, please see Section 2.2.2.

7.4 Using DataReaders to Access Data (Read & Take)
7-55
7. Receiving Data
7.4 Using DataReaders to Access Data (Read & Take)
For user applications to access the data received for a DataReader, they must use the
type-specific derived class or set of functions in the C API. Thus for a user data type
‘Foo’, you must use methods of the FooDataReader class. The type-specific class or
functions are automatically generated if you use rtiddsgen. Else, you will have to create
them yourself, see Section 3.8.5.1 for more details.
7.4.1 Using a Type-Specific DataReader (FooDataReader)
Using a Subscriber you will create a DataReader associating it with a specific data type,
for example ‘Foo’. Note that the Subscriber’s create_datareader() method returns a
generic DataReader. When your code is ready to access data samples received for the
DataReader, you must use type-specific operations associated with the FooDataReader,
such as read() and take().
To cast the generic DataReader returned by create_datareader() into an object of type
FooDataReader, you should use the type-safe narrow() method of the FooDataReader
class. narrow() will make sure that the generic DataReader passed to it is indeed an
object of the FooDataReader class before it makes the cast. Else, it will return NULL.
Figure 7.8 on page 7-22 shows an example:
Foo_reader = FooDataReader::narrow(reader);
Table 7.3, “DataReader Operations,” on page 7-25 lists type-specific operations using a
FooDataReader. Also listed are generic, non-type specific operations that can be per-
formed using the base class object DDSDataReader (or DDS_DataReader in C). In C,
you must pass a pointer to a DDS_DataReader to those generic functions.
7.4.2 Loaning and Returning Data and SampleInfo Sequences
The read() and take() operations (and their variations) return information to your appli-
cation in two sequences:
❏ received data samples in a sequence of the data type
❏ corresponding information about each sample in a SampleInfo sequence
These sequences are parameters that are passed by your code into the read() and take()
operations. If you use empty sequences (sequences that are initialized but have a maxi-
mum length of 0), RTI Data Distribution Service will fill those sequences with memory
directly loaned from the receive queue itself. There is no copying of the data or of Sam-

Chapter 7
7-56
pleInfo when the contents of the sequences are loaned. This is certainly the most effi-
cient way for your code to retrieve the data.
However when you do so, your code must return the loaned sequences back to RTI Data
Distribution Service so that they can be reused by the receive queue. If your code does not
return the loan by calling the FooDataReader’s return_loan() method, then RTI Data
Distribution Service will eventually run out of memory to store data samples received
from the network for that DataReader. See Figure 7.16 for an example of borrowing and
returning loaned sequences.
DDS_ReturnCode_t return_loan(FooSeq &received_data,
DDS_SampleInfoSeq &info_seq);
Figure 7.16 Using Loaned Sequences in read() and take()
// In C++ and Java, sequences are automatically initialized
// to be empty
FooSeq data_seq;
1
DDS_SampleInfoSeq info_seq;
DDS_ReturnCode_t retcode;
...
// with empty sequences, a take() or read() will return loaned
// sequence elements
retcode = Foo_reader->take(data_seq, info_seq,
DDS_LENGTH_UNLIMITED, DDS_ANY_SAMPLE_STATE,
DDS_ANY_VIEW_STATE, DDS_ANY_INSTANCE_STATE);
... // process the returned data
// must return the loaned sequences when done processing
Foo_reader->return_loan(data_seq, info_seq);
...
1. In the C API, you must use the FooSeq_initialize() and DDS_SampleInfoSeq_initialize() operations
or the macro DDS_SEQUENCE_INITIALIZER to initialize the FooSeq and DDS_SampleInfoSeq to be
empty. For example,
DDS_SampleInfoSeq infoSeq;
DDS_SampleInfoSeq_initialize(&infoSeq);
or
FooSeq fooSeq = DDS_SEQUENCE_INITIALIZER;

7.4 Using DataReaders to Access Data (Read & Take)
7-57
7. Receiving Data
If your code provides its own sequences to the read/take operations, then RTI Data Dis-
tribution Service will copy the data from the receive queue. In that case, you do not have
to call return_loan() when you are finished with the data. However, you must make
sure the following is true, or else the read/take operation will fail with a return code of
DDS_RETCODE_PRECONDITION_NOT_MET:
❏ The received_data of type FooSeq and info_seq of type DDS_SampleInfoSeq
passed in as parameters have the same maximum size (length).
❏ The maximum size (length) of the sequences are less than or equal to the passed
in parameter, max_samples.
7.4.3 Accessing Data Samples with Read or Take
To access the data samples that RTI Data Distribution Service has received for a
DataReader, you must invoke the read() or take() methods. These methods return a list
(sequence) of data samples and additional information about the samples in a corre-
sponding list (sequence) of SampleInfo structures. The contents of SampleInfo are
described in Section 7.4.5.
The way RTI Data Distribution Service builds the collection of samples depends on QoS
policies set on the DataReader and Subscriber, the source_timestamp of the samples,
and the sample_states, view_states, and instance_states parameters passed to the read/
take operation.
In read() and take(), you may enter parameters so that RTI Data Distribution Service
selectively returns data samples currently stored in the DataReader’s receive queue. You
may want RTI Data Distribution Service to return all of the data in a single list or only a
subset of the available samples as configured using the sample_states, view_states, and
instance_states masks. Section 7.4.5 describes how these masks are used to determine
which data samples should be returned.
7.4.3.1 Read vs. Take
The difference between read() and take() is how RTI Data Distribution Service treats the
data that is returned. With take(), RTI Data Distribution Service will remove the data from
the DataReader’s receive queue. The data returned by RTI Data Distribution Service is no
longer stored by RTI Data Distribution Service. With read(), RTI Data Distribution Service
will continue to store the data in the DataReader’s receive queue. The same data may be
read again until it is taken in subsequent take() calls. Note that the data stored in the
DataReader’s receive queue may be overwritten, even if it has not been read, depending
on the setting of the HISTORY QosPolicy (Section 6.5.8).

Chapter 7
7-58
The read() and take() operations are non-blocking calls, so that they may return no data
(DDS_RETCODE_NO_DATA) if the receive queue is empty or has no data that
matches the criteria specified by the StateMasks.
The read_w_condition() and take_w_condition() operations take a ReadCondition as a
parameter instead of sample, view or instance states. The only samples returned will be
those for which the ReadCondition is TRUE. These operations, in conjunction with Read-
Conditions and a WaitSet, allow you to perform ‘waiting reads.’ For more information,
see ReadConditions and QueryConditions (Section 4.6.7).
As you will see, read and take have the same parameters:
DDS_ReturnCode_t read(
FooSeq &received_data_seq,
DDS_SampleInfoSeq &info_seq,
DDS_Long max_samples,
DDS_SampleStateMask sample_states,
DDS_ViewStateMask view_states,
DDS_InstanceStateMask instance_states);
DDS_ReturnCode_t take(
FooSeq &received_data_seq,
DDS_SampleInfoSeq &info_seq,
DDS_Long max_samples,
DDS_SampleStateMask sample_states,
DDS_ViewStateMask view_states,
DDS_InstanceStateMask instance_states);
Note:
These operations may loan internal RTI Data Distribution Service memory, which
must be returned with return_loan(). See Loaning and Returning Data and SampleInfo
Sequences (Section 7.4.2).
Both operations return an ordered collection of data samples (in the received_data_seq
parameter) and information about each sample (in the info_seq parameter). Exactly
how they are ordered depends on the setting of the PRESENTATION QosPolicy (Section
6.4.6) and the DESTINATION_ORDER QosPolicy (Section 6.5.5). For more details please
see the online documentation for read() and take().
In read() and take(), you can use the sample_states, view_states, and instance_states
parameters to specify properties that are used to select the actual samples that are
returned by those methods. With different combinations of these three parameters, you
can direct RTI Data Distribution Service to return all data samples, data samples that you
have not accessed before, the data samples of instances that you have not seen before,
data samples of instances that have been disposed, etc. The possible values for the dif-
ferent states are described both in the online documentation and in Section 7.4.5.

7.4 Using DataReaders to Access Data (Read & Take)
7-59
7. Receiving Data
Table 7.16 lists the variations of the read() and take() operations.
Table 7.16 Read and Take Operations
Read Operations Take Operations Description Reference
read take
Reads/takes a collection of data
samples from the DataReader.
Can be used for both keyed and
non-keyed data types.
Section 7.4.3
read_instance take_instance
Identical to read/take, but all sam-
ples returned belong to a single
instance, which you specify as a
parameter.
Can only be used with keyed data
types.
Section 7.4.3.4
read_next_instance take_next_instance
Similar to read_instance, but the
actual instance is not directly speci-
fied as a parameter. Instead, the
samples will all belong to instance
ordered after the instance that is
specified by the previous_handle
parameter.
Section 7.4.3.5
read_next_instance_
w_condition
take_next_instance_
w_condition
Accesses a collection of data sam-
ples of the next instance that match
a specific set of ReadConditions,
from the DataReader.
Section 7.4.3.7
read_next_sample take_next_sample
These p
rovide a convenient way
to access the next data sample
in the receive queue that has not
been accessed before.
Section 7.4.3.3
read_w_condition take_w_condition
Accesses a collection of data samples
from the DataReader that match spe-
cific ReadCondition criteria.
Section 7.4.3.6

Chapter 7
7-60
7.4.3.2 General Patterns for Accessing Data
Once the data samples are available to the data readers, the samples can be read or
taken by the application. The basic rule is that the application may do this in any order it
wishes. This approach is very flexible and allows the application ultimate control.
To access data coherently, or in order, the PRESENTATION QosPolicy (Section 6.4.6)
must be set properly.
❏ Accessing Samples If No Order or Coherence Is Required
Simply access the data by calling read/take on each DataReader in any order you
want.
You do not have to call begin_access() and end_access(). However, doing so is
not an error and it will have no effect.
You can call the Subscriber’s get_datareaders() operation to see which
DataReaders have data to be read, but you do not need to read all of them or read
them in a particular order. The get_datareaders() operation will return a logical
'set' in the sense that the same DataReader will not appear twice. The order of the
DataReaders returned is not specified.
❏ Accessing Samples within a SubscriberListener
This case describes how to access the data inside the listener's
on_data_on_readers() operation (regardless of the PRESENTATION QoS policy
settings).
To do so, you can call read/take on each DataReader in any order. You can also
delegate accessing of the data to the DataReaderListeners by calling the Sub-
scriber’s notify_datareaders() operation.
Similar to the previous case, you can still call the Subscriber’s get_datareaders()
operation to determine which DataReaders have data to be read, but you do not
have to read all of them, or read them in a particular order. get_datareaders()
will return a logical 'set.'
You do not have to call begin_access() and end_access(). However, doing so is
not an error and it will have no effect.

7.4 Using DataReaders to Access Data (Read & Take)
7-61
7. Receiving Data
7.4.3.3 read_next_sample and take_next_sample
The read_next_sample() or take_next_sample() operation is used to retrieve the next
sample that hasn’t already been accessed. It is a simple way to 'read' samples and frees
your application from managing sequences and specifying sample, instance or view
states. It behaves the same as calling read() or take() with max_samples = 1,
sample_states = NOT_READ, view_states = ANY_VIEW_STATE, and instance_states
= ANY_INSTANCE_STATE.
DDS_ReturnCode_t read_next_sample(Foo & received_data,
DDS_SampleInfo & sample_info);
DDS_ReturnCode_t take_next_sample(Foo & received_data,
DDS_SampleInfo & sample_info);
It copies the next, not-previously-accessed data value from the DataReader. It also copies
the sample’s corresponding DDS_SampleInfo structure.
If there is no unread data in the DataReader, the operation will return
DDS_RETCODE_NO_DATA and nothing is copied.
Since this operation copies both the data sample and the SampleInfo into user-provided
storage, it does not allocate nor loan memory. You do not have to call return_loan() after
this operation.
Note: If the received_data parameter references a structure that contains a sequence and
that sequence has not been initialized, the operation will return
DDS_RETCODE_ERROR.
7.4.3.4 read_instance and take_instance
The read_instance() and take_instance() operations are identical to read() and take(),
but they are used to access samples for just a specific instance (key value). The parame-
ters are the same, except you must also supply an instance handle. These functions can
only be used when the DataReader is tied to a keyed type, see Section 2.2.2 for more
about keyed data types.
These operations may return BAD_PARAMETER if the instance handle does not corre-
spond to an existing data-object known to the DataReader.
The handle to a particular data instance could have been cached from a previous read()
operation (value taken from the SampleInfo struct) or created by using the DataReader’s
lookup_instance() operation.

Chapter 7
7-62
DDS_ReturnCode_t read_instance(
FooSeq &received_data,
DDS_SampleInfoSeq &info_seq,
DDS_Long max_samples,
const DDS_InstanceHandle_t &a_handle,
DDS_SampleStateMask sample_states,
DDS_ViewStateMask view_states,
DDS_InstanceStateMask instance_states);
Note:
This operation may loan internal RTI Data Distribution Service memory, which
must be returned with return_loan(). See Loaning and Returning Data and SampleInfo
Sequences (Section 7.4.2).
7.4.3.5 read_next_instance and take_next_instance
The read_next_instance() and take_next_instance() operations are similar to
read_instance() and take_instance() in that they return samples for a specific data
instance (key value). The difference is that instead of passing the handle of the data
instance for which you want data samples, instead you pass the handle to a ‘previous’
instance. The returned samples will all belong to the 'next' instance, where the ordering
of instances is explained below.
DDS_ReturnCode_t read_next_instance(
FooSeq &received_data,
DDS_SampleInfoSeq &info_seq,
DDS_Long max_samples,
const DDS_InstanceHandle_t &previous_handle,
DDS_SampleStateMask sample_states,
DDS_ViewStateMask view_states,
DDS_InstanceStateMask instance_states)
RTI Data Distribution Service orders all instances relative to each other.
1
This ordering
depends on the value of the key as defined for the data type associated with the Topic.
For the purposes of this discussion, it is 'as if' each instance handle is represented by a
unique integer and thus different instance handles can be ordered by their value.
This operation will return values for the next instance handle that has data samples
stored in the receive queue (that meet the criteria specified by the StateMasks). The next
instance handle will be ordered after the previous_handle that is passed in as a parame-
ter.
1. The ordering of the instances is specific to each implementation of the DDS standard; to maximize the
portability of your code, do not assume any particular order. In the case of RTI Data Distribution Service (and
likely other DDS implementations as well), the order is not likely to be meaningful to you as a developer; it is
simply important that some ordering exists.

7.4 Using DataReaders to Access Data (Read & Take)
7-63
7. Receiving Data
The special value DDS_HANDLE_NIL can be passed in as the previous_handle. Doing
so, you will receive values for the “smallest” instance handle that has data samples
stored in the receive queue that you have not yet accessed.
You can call the read_next_instance() operation with a previous_handle that does not
correspond to an instance currently managed by the DataReader. For example, you could
use this approach to iterate though all the instances, take all the samples with a
NOT_ALIVE_NO_WRITERS instance_state, return the loans (at which point the
instance information may be removed, and thus the handle becomes invalid), and then
try to read the next instance.
The example in Figure 7.17 shows how to use take_next_instance() iteratively to pro-
cess all the data received for an instance, one instance at a time. We always pass in
DDS_HANDLE_NIL as the value of previous_handle. Each time through the loop, we
will receive samples for a different instance, since the previous time through the loop,
all of the samples of the previous instance were returned (and thus accessed).
Note: This operation may loan internal RTI Data Distribution Service memory, which
must be returned with return_loan(). See Loaning and Returning Data and SampleInfo
Sequences (Section 7.4.2).
7.4.3.6 read_w_condition and take_w_condition
The read_w_condition() and take_w_condition() operations are identical to read() and
take(), but instead of passing in the sample_states, view_states, and instance_states
mask parameters directly, you pass in a ReadCondition (which specifies these masks).
DDS_ReturnCode_t read_w_condition
(FooSeq &received_data,
DDS_SampleInfoSeq &info_seq,
DDS_Long max_samples,
DDSReadCondition *condition)
Note:
This operation may loan internal RTI Data Distribution Service memory, which
must be returned with return_loan(). See Loaning and Returning Data and SampleInfo
Sequences (Section 7.4.2).
7.4.3.7 read_next_instance_w_condition and take_next_instance_w_condition
The read_next_instance_w_condition() and take_next_instance_w_condition() opera-
tions are identical to read_next_instance() and take_next_instance(), but instead of

Chapter 7
7-64
Figure 7.17 Using take_next_instance() to process received data
FooSeq received_data;
1
DDS_SampleInfoSeq info_seq;
while (retcode = reader->take_next_instance(
received_data, info_seq,
DDS_LENGTH_UNLIMITED,
DDS_HANDLE_NIL,
DDS_ANY_SAMPLE_STATE,
DDS_ANY_VIEW_STATE,
DDS_ANY_INSTANCE_STATE)
!= DDS_RETCODE_NO_DATA) {
// the data samples returned in received_data will all
// be for a single instance
... // process the data
// now return the loaned sequences
if (reader->return_loan(received_data, info_seq) !=
DDS_RETCODE_OK) {
... // handle error
}
}
1. In the C API, you must use the FooSeq_initialize() and DDS_SampleInfoSeq_initialize() operations
or the macro DDS_SEQUENCE_INITIALIZER to initialize the FooSeq and DDS_SampleInfoSeq to be
empty. For example,
DDS_SampleInfoSeq infoSeq;
DDS_SampleInfoSeq_initialize(&infoSeq);
or
FooSeq fooSeq = DDS_SEQUENCE_INITIALIZER;

7.4 Using DataReaders to Access Data (Read & Take)
7-65
7. Receiving Data
passing in the sample_states, view_states, and instance_states mask parameters directly,
you pass in a ReadCondition (which specifies these masks).
DDS_ReturnCode_t read_next_instance_w_condition
(FooSeq &received_data,
DDS_SampleInfoSeq &info_seq,
DDS_Long max_samples,
const DDS_InstanceHandle_t &previous_handle,
DDSReadCondition *condition)
Note:
This operation may loan internal RTI Data Distribution Service memory, which
must be returned with return_loan(). See Loaning and Returning Data and SampleInfo
Sequences (Section 7.4.2).
7.4.4 The Sequence Data Structure
The DDS specification uses sequences whenever a variable-length array of elements
must be passed through the API. This includes passing QosPolicies into RTI Data Distri-
bution Service, as well as retrieving data samples from RTI Data Distribution Service. A
sequence is an ordered collection of elements of the same type. The type of a sequence
containing elements of type “Foo” (whether “Foo” is one of your types or a built-in RTI
Data Distribution Service type) is typically called “FooSeq.”
In all APIs except Java, FooSeq contains deep copies of Foo elements; in Java, which
does not provide direct support for deep copy semantics, FooSeq contains references to
Foo objects. In Java, sequences implement the java.util.List interface, and thus support
all of the collection APIs and idioms familiar to Java programmers.
A sequence is logically composed of three things: an array of elements, a maximum num-
ber of elements that the array may contain (i.e. its allocated size), and a logical length
indicating how many of the allocated elements are valid. The length may vary dynami-
cally between 0 and the maximum (inclusive); it is not permissible to access an element
at an index greater than or equal to the length.
A sequence may either “own” the memory associated with it, or it may “borrow” that
memory. If a sequence owns its own memory, then the sequence itself will allocate the
its memory and is permitted to grow and shrink that memory (i.e. change its maximum)
dynamically.
You can also loan a sequence of memory using the sequence-specific operations
loan_contiguous() or loan_discontiguous(). This is useful if you want RTI Data Distri-
bution Service to copy the received data samples directly into data structures allocated in
user space.

Chapter 7
7-66
Please do not confuse (a) the user loaning memory to a sequence with (b) RTI Data Dis-
tribution Service loaning internal memory from the receive queue to the user code via the
read() or take() operations. For sequences of user data, these are complementary opera-
tions. read() and take() loan memory to the user, passing in a sequence that has been
loaned memory with loan_contiguous() or loan_discontinguous().
A sequence with loaned of memory may not change its maximum size.
For C developers: In C, because there is no concept of a constructor, sequences must be
initialized before they are used. You can either set a sequence equal to the macro
DDS_SEQUENCE_INITIALIZER or use a sequence-specific method,
<type>Seq_initialize(), to initialize sequences.
For C++, C++/CLI, and C# developers: C++ sequence classes overload the [ ] operators to
allow you to access their elements as if the sequence were a simple array. How-
ever, for code portability reasons, RTI Data Distribution Service’s implementation
of sequences does not use the Standard Template Library (STL).
For Java developers: In Java, sequences implement the List interface, and typically, a List
must contain Objects; it cannot contain primitive types directly. This restriction
makes Lists of primitives types less efficient because each type must be wrapped
and unwrapped into and from an Object as it is added to and removed from the
List.
RTI Data Distribution Service provides a more efficient implementation for sequences of
primitive types. In RTI Data Distribution Service, primitive sequence types (e.g., IntSeq,
FloatSeq, etc.) are implemented as wrappers around arrays of primitive types. The
wrapper also provides the usual List APIs; however, these APIs manipulate Objects
that store the primitive type.
More efficient APIs are also provided that manipulate the primitive types directly and
thus avoid unnecessary memory allocations and type casts. These additional methods
are named according to the pattern <standard method><primitive type>; for example, the
IntSeq class defines methods addInt() and getInt() that correspond to the List APIs
add() and get(). addInt() and getInt() directly manipulate int values while add() and
get() manipulate Objects
that contain a single int.
For more information on sequence APIs in all languages, please consult the online docu-
mentation (from the main page, select Modules, Infrastructure, Sequence Support).
7.4.5 The SampleInfo Structure
When you invoke the read/take operations, for every data sample that is returned, a
corresponding SampleInfo is also returned. SampleInfo structures provide you with
additional information about the data samples received by RTI Data Distribution Service.

7.4 Using DataReaders to Access Data (Read & Take)
7-67
7. Receiving Data
Table 7.17 shows the format of the SampleInfo structure.
Table 7.17 DDS_SampleInfo Structure
Type Field Name Description
DDS_SampleStateKind sample_state See Section 7.4.5.2
DDS_ViewStateKind view_state See Section 7.4.5.3
DDS_InstanceStateKind instance_state See Section 7.4.5.4
DDS_Time_t source_timestamp
Time stored by the DataWriter
when the sample was written.
DDS_InstanceHandle_t instance_handle
Handle to the data-instance corre-
sponding to the sample.
DDS_InstanceHandle_t publication_handle
Local handle to the DataWriter that
modified the instance. This is the
same instance handle returned by
get_matched_publications(). You
can use this handle when calling
get_matched_publication_data().
DDS_Long
disposed_generation_count
See Section 7.4.5.5.
no_writers_generation_count
sample_rank
generation_rank
absolute_generation_rank
DDS_Boolean valid_data
Indicates whether the data sample
includes valid data. See
Section 7.4.5.6.
DDS_Time_t reception_timestamp
Time stored when the sample was
committed by the DataReader. See
Section 7.4.5.1.
DDS_SequenceNumber_t publication_sequence_number
Publication sequence number
assigned when the sample was
written by the DataWriter.
DDS_SequenceNumber_t reception_sequence_number
Reception sequence number
assigned when the sample was
committed by the DataReader. See
Section 7.4.5.1.

Chapter 7
7-68
7.4.5.1 Reception Timestamp
In reliable communication, if data samples are received out received of order, RTI Data
Distribution Service will not deliver them until all the previous data samples have been
received. For example, if Sample 2 arrives before Sample 1, Sample 2 cannot be deliv-
ered until Sample 1 is received. The reception_timestamp is the time when all previous
samples has been received—the time at which the sample is committed. If samples are all
received in order, the committed time will be same as reception time. However, if sam-
ples are lost on the wire, then the committed time will be later than the initial reception
time.
7.4.5.2 Sample States
For each sample received, RTI Data Distribution Service keeps a sample_state relative to
each DataReader. The sample_state can be either:
❏ READ The DataReader has already accessed that sample by means of read().
❏ NOT_READ The DataReader has never accessed that sample before.
The samples retrieved by a read() or take() need not all have the same sample_state.
7.4.5.3 View States
For each instance (identified by a unique key value), RTI Data Distribution Service keeps
a view_state relative to each DataReader. The view_state can be either:
❏ NEW Either this is the first time the DataReader has ever accessed samples of the
instance, or else the DataReader has accessed previous samples of the instance,
but the instance has since been reborn (i.e. become not-alive and then alive
again). These two cases are distinguished by examining the
disposed_generation_count and the no_writers_generation_count (see
Section 7.4.5.5).
❏ NOT_NEW The DataReader has already accessed samples of the same instance
and the instance has not been reborn since.
The view_state in the SampleInfo structure is really a per-instance concept (as opposed
to the sample_state which is per data sample). Thus all data samples related to the same
instance that are returned by read() or take() will have the same value for view_state.

7.4 Using DataReaders to Access Data (Read & Take)
7-69
7. Receiving Data
7.4.5.4 Instance States
RTI Data Distribution Service keeps an instance_state for each instance; it can be:
❏ ALIVE The following are all true: (a) samples have been received for the
instance, (b) there are live DataWriters writing the instance, and (c) the instance
has not been explicitly disposed (or else more samples have been received after it
was disposed).
❏ NOT_ALIVE_DISPOSED The instance was explicitly disposed by a DataWriter by
means of the dispose() operation.
❏ NOT_ALIVE_NO_WRITERS The instance has been declared as not-alive by the
DataReader because it has determined that there are no live DataWriter entities
writing that instance.
The events that cause the instance_state to change can depend on the setting of the
OWNERSHIP QosPolicy (Section 6.5.13):
❏ If OWNERSHIP QoS is set to EXCLUSIVE, the instance_state becomes
NOT_ALIVE_DISPOSED only if the DataWriter that currently “owns” the
instance explicitly disposes it. The instance_state will become ALIVE again only
if the DataWriter that owns the instance writes it. Note that ownership of the
instance is determined by a combination of the OWNERSHIP and
OWNERSHIP_STRENGTH QosPolicies. Ownership of an instance can dynami-
cally change.
❏ If OWNERSHIP QoS is set to SHARED, the instance_state becomes
NOT_ALIVE_DISPOSED if any DataWriter explicitly disposes the instance. The
instance_state becomes ALIVE as soon as any DataWriter writes the instance
again.
Since the instance_state in the SampleInfo structure is a per-instance concept, all data
samples related to the same instance that are returned by read() or take() will have the
same value for instance_state.
7.4.5.5 Generation Counts and Ranks
Generation counts and ranks allow your application to distinguish samples belonging
to different ‘generations’ of the instance. It is possible for an instance to become alive, be
disposed and become not-alive, and then to cycle again from alive to not-alive states
during the operation of an application. Each time an instance becomes alive defines a
new generation for the instance.

Chapter 7
7-70
It is possible that an instance may cycle through alive and not-alive states multiple times
before the application accesses the data samples for the instance. This means that the
data samples returned by read() and take() may cross generations. That is, some sam-
ples were published when the instance was alive in one generation and other samples
were published when the instance transitioned through the non-alive state into the alive
state again. It may be important to your application to distinguish the data samples by
the generation in which they were published.
Each DataReader keeps two counters for each new instance it detects (recall that instances
are distinguished by their key values):
❏ disposed_generation_count Counts how many times the instance_state of the
corresponding instance changes from NOT_ALIVE_DISPOSED to ALIVE. The
counter is reset when the instance resource is reclaimed.
❏ no_writers_generation_count Counts how many times the instance_state of the
corresponding instance changes from NOT_ALIVE_NO_WRITERS to ALIVE.
The counter is reset when the instance resource is reclaimed.
The disposed_generation_count and no_writers_generation_count fields in the Sam-
pleInfo structure capture a snapshot of the corresponding counters at the time the cor-
responding sample was received.
The sample_rank and generation_rank in the SampleInfo structure are computed rela-
tive to the sequence of samples returned by read() or take():
❏ sample_rank Indicates how many samples of the same instance follow the cur-
rent one in the sequence. The samples are always time-ordered, thus the newest
sample of an instance will have a sample_rank of 0. Depending on what you
have configured read() and take() to return, a sample_rank of 0 may or may not
be the newest sample that was ever received. It is just the newest sample in the
sequence that was returned.
❏ generation_rank Indicates the difference in ‘generations’ between the sample and
the newest sample of the same instance as returned in the sequence. If a sample
belongs to the same generation as the newest sample in the sequence returned by
read() and take(), then generation_rank will be 0.
❏ absolute_generation_rank Indicates the difference in ‘generations’ between the
sample and the newest sample of the same instance ever received by the
DataReader. Recall that the data sequence returned by read() and take() may not
contain all of the data in the DataReader’s receive queue. Thus, a sample that
belongs to the newest generation of the instance will have an
absolute_generation_rank of 0.

7.4 Using DataReaders to Access Data (Read & Take)
7-71
7. Receiving Data
Like the ‘generation count’ values, the ‘rank’ values are also reset to 0 if the instance
resource is reclaimed.
By using the sample_rank, generation_rank and absolute_generation_rank informa-
tion in the SampleInfo structure, your application can determine exactly what hap-
pened to the instance and thus make appropriate decisions of what to do with the data
samples received for the instance. For example:
❏ A sample with sample_rank = 0 is the newest sample of the instance in the
returned sequence.
❏ Samples that belong to the same generation will have the same generation_rank
(as well as absolute_generation_rank).
❏ Samples with absolute_generation_rank = 0 belong to the newest generation for
the instance received by the DataReader.
7.4.5.6 Valid Data Flag
The SampleInfo structure’s valid_data flag indicates whether the sample contains data
or is only used to communicate a change in the instance_state of the instance.
Normally, each sample contains both a SampleInfo structure and some data. However,
there are situations in which the sample only contains the SampleInfo and does not have
any associated data. This occurs when RTI Data Distribution Service notifies the applica-
tion of a change of state for an instance that was caused by some internal mechanism
(such as a timeout) for which there is no associated data. An example is whenRTI Data
Distribution Service detects that an instance has no writers and changes the correspond-
ing instance_state to NOT_ALIVE_NO_WRITERS.
If this flag is TRUE, then the sample contains valid Data. If the flag is FALSE, the Sample
contains no data.
To ensure correctness and portability, your application must check the valid_data flag
prior to accessing the data associated with the sample, and only access the data if it is
TRUE.

Chapter 7
7-72
7.5 Subscriber QosPolicies
Subscribers have the same set of QosPolicies as Publishers; see Publisher/Subscriber
QosPolicies (Section 6.4).
❏ ENTITYFACTORY QosPolicy (Section 6.4.2)
❏ EXCLUSIVE_AREA QosPolicy (DDS Extension) (Section 6.4.3)
❏ GROUP_DATA QosPolicy (Section 6.4.4)
❏ PARTITION QosPolicy (Section 6.4.5)
❏ PRESENTATION QosPolicy (Section 6.4.6)
7.6 DataReader QosPolicies
This section describes the QosPolicies that are strictly for DataReaders (not for DataWrit-
ers). For a complete list of QosPolicies that apply to DataReaders, see Table 7.15 on
page 7-48.
❏ DATA_READER_PROTOCOL QosPolicy (DDS Extension) (Section 7.6.1)
❏ DATA_READER_RESOURCE_LIMITS QosPolicy (DDS Extension) (Section
7.6.2)
❏ TIME_BASED_FILTER QosPolicy (Section 7.6.4)
❏ TRANSPORT_MULTICAST QosPolicy (DDS Extension) (Section 7.6.5)
7.6.1 DATA_READER_PROTOCOL QosPolicy (DDS Extension)
The DATA_READER_PROTOCOL QosPolicy applies only to DataReaders that are set up
for reliable operation (see RELIABILITY QosPolicy (Section 6.5.17)). This policy allows
the application to fine-tune the reliability protocol separately for each DataReader. For
details of the reliable protocol used by RTI Data Distribution Service, see Chapter 10.
DDS has a standard protocol for packet (user and meta data) exchange between applica-
tions using DDS for communications. The DataReaderProtocol QosPolicy gives you

7.6 DataReader QosPolicies
7-73
7. Receiving Data
control over configurable portions of the protocol, including the configuration of the
reliable data delivery mechanism of the protocol on a per DataReader basis.
These configuration parameters control timing and timeouts, and give you the ability to
trade off between speed of data loss detection and repair, versus network and CPU
bandwidth used to maintain reliability.
It is important to tune the reliability protocol on a per DataReader basis to meet the
requirements of the end-user application so that data can be sent between DataWriters
and DataReaders in an efficient and optimal manner in the presence of data loss.
You can also use this QosPolicy to control how DDS responds to "slow" reliable
DataReaders or ones that disconnect or are otherwise lost.
See the RELIABILITY QosPolicy (Section 6.5.17) for more information on the per-
DataReader/DataWriter reliability configuration. The HISTORY QosPolicy (Section
6.5.8) and RESOURCE_LIMITS QosPolicy (Section 6.5.18) also play an important role in
the DDS reliability protocol.
This policy includes the members presented in Table 7.18 and Table 7.19. For defaults
and valid ranges, please refer to the online documentation.
When setting the fields in this policy, the following rule applies. If this is false, RTI Data
Distribution Service returns DDS_RETCODE_INCONSISTENT_POLICY when setting
the QoS:
❏ max_heartbeat_response_delay >= min_heartbeat_response_delay
7.6.1.1 Example
For many applications, changing these values will not be necessary. However, the more
nodes that your distributed application uses, and the greater the amount of network
traffic it generates, the more likely it is that you will want to consider experimenting
with these values.
When a reliable DataReader receives a heartbeat from a DataWriter, it will send an ACK/
NACK packet back to the DataWriter. Instead of sending the packet out immediately, the
DataReader can choose to send it after a delay. This policy sets the minimum and maxi-
mum time to delay; the actual delay will be a random value in between. (For more on
heartbeats and ACK/NACK messages, see Chapter 12: Discovery.)
Why is a delay useful? For DataWriters that have multiple reliable DataReaders, an effi-
cient way of heartbeating all of the DataReaders is to send a single heartbeat via multi-
cast. In that case, all of the DataReaders will receive the heartbeat (approximately)
simultaneously. If all DataReaders immediately respond with a ACK/NACK packet, the
network may be flooded. While the size of a ACK/NACK packet is relatively small, as
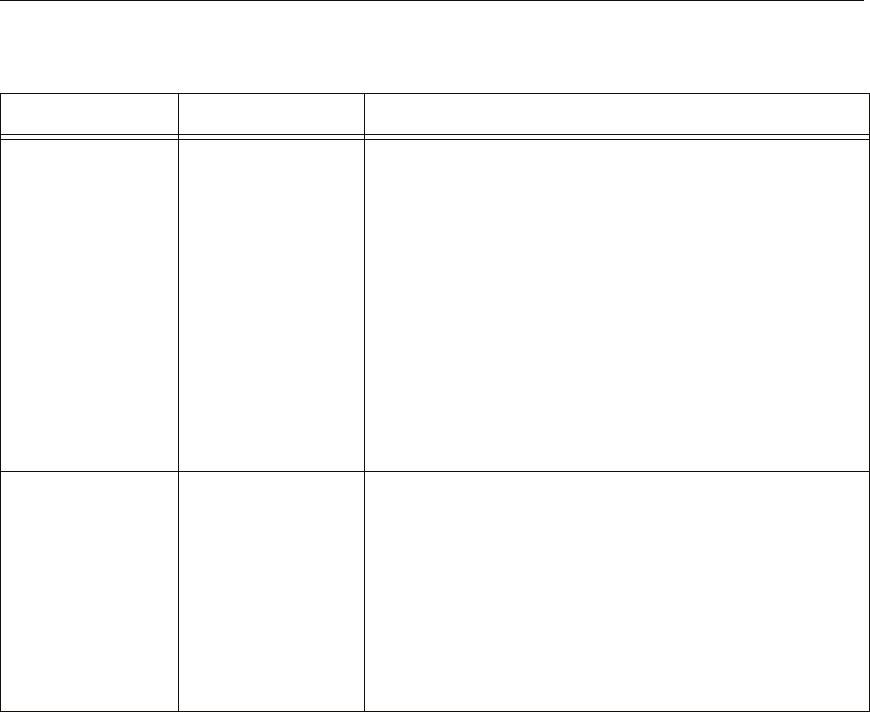
Chapter 7
7-74
Table 7.18 DDS_DataReaderProtocolQosPolicy
Type Field Name Description
DDS_GUID_t virtual_guid
The virtual GUID (Global Unique Identifier) is used to
uniquely identify the same DataReader across multiple incar-
nations. In other words, this value allows RTI Data Distribution
Service to remember information about a DataReader that may
be deleted and then recreated.
This value is used to provide durable reader state.
For more information, see Durability and Persistence Based on
Virtual GUIDs (Section 11.2).
By default, RTI Data Distribution Service will assign a virtual
GUID automatically. If you want to restore the state of the
reader after a restart, you can retrieve the value of the reader's
virtual GUID using the DataReader’s get_qos() operation, and
set the virtual GUID of the restarted DataReader to the same
value.
DDS_UnsignedLong rtps_object_id
Determines the DataReader’s RTPS object ID, according to the
DDS-RTPS Interoperability Wire Protocol.
Only the last 3 bytes are used; the most significant byte is
ignored.
The rtps_host_id, rtps_app_id, rtps_instance_id in the
WIRE_PROTOCOL QosPolicy (DDS Extension) (Section
8.5.9), together with the 3 least significant bytes in
rtps_object_id, and another byte assigned by RTI Data Distri-
bution Service to identify the entity type, forms the Builtin-
TopicKey in SubscriptionBuiltinTopicData.

7.6 DataReader QosPolicies
7-75
7. Receiving Data
DDS_Boolean expects_inline_qos
Specifies whether this DataReader expects inline QoS with
every sample.
DataReaders usually rely on the discovery process to propagate
QoS changes for matched DataWriters. Another way to get
QoS information is to have it sent inline with a sample.
With RTI Data Distribution Service, DataWriters and DataRead-
ers cache discovery information, so sending inline QoS is typi-
cally unnecessary. The use of inline QoS is only needed for
stateless implementations of DDS in which DataReaders do not
cache Discovery information.
The complete set of QoS that a DataWriter may send inline is
specified by the Real-Time Publish-Subscribe (RTPS) Wire
Interoperability Protocol.
Note: The use of inline QoS creates an additional wire-pay-
load, consuming extra bandwidth and serialization/deserial-
ization time.
DDS_Boolean disable_positive_acks
Determines whether the DataReader sends positive acknowl-
edgements (ACKs) to matching DataWriters.
When TRUE. the matching DataWriter will keep samples in its
queue for this DataReader for a minimum keep duration (see
Disabling Positive Acknowledgements (Section 6.5.2.3)).
When strict-reliability is not required and NACK-based reli-
ability is sufficient, setting this field reduces overhead net-
work traffic.
Table 7.18 DDS_DataReaderProtocolQosPolicy
Type Field Name Description
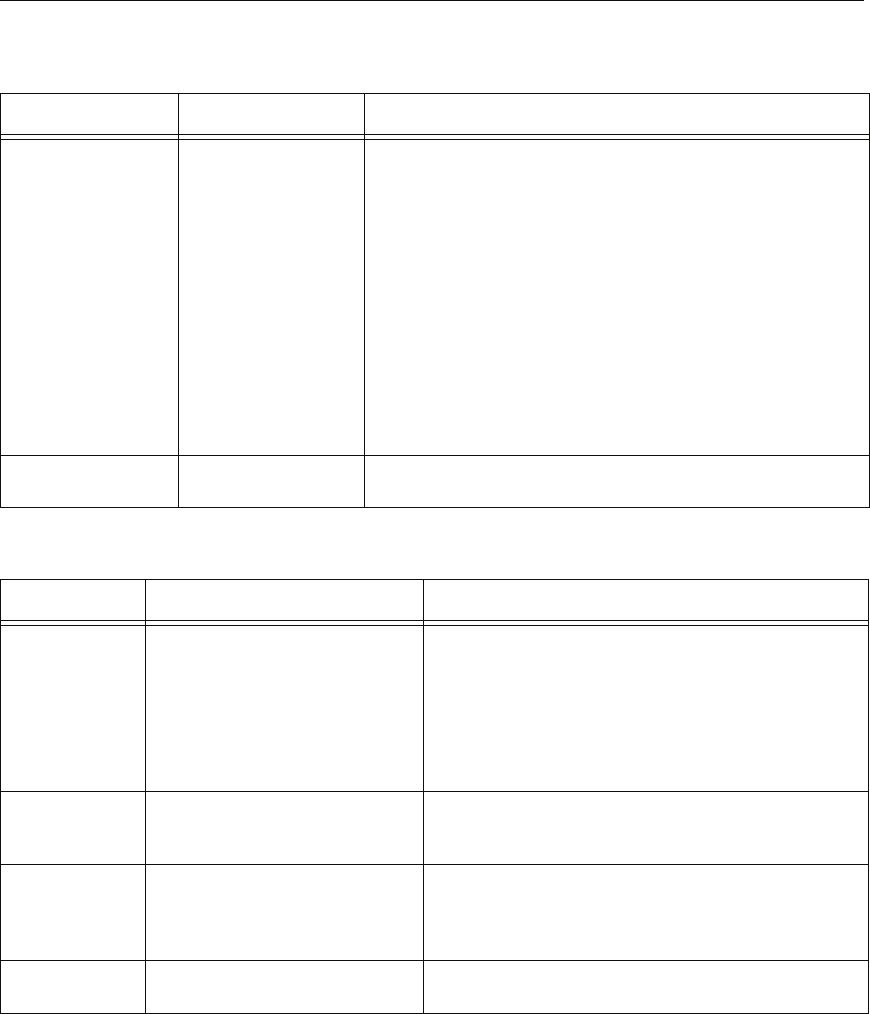
Chapter 7
7-76
DDS_Boolean
propagate_dispose_
of_unregistered_
instances
Indicates whether or not an instance can move to the
DDS_NOT_ALIVE_DISPOSED_INSTANCE_STATE state
without being in the DDS_ALIVE_INSTANCE_STATE state.
This field only applies to keyed readers.
When set to TRUE, the DataReader will receive dispose notifi-
cations even if the instance is not alive.
To make sure the key is available to the FooDataReader’s
get_key_value() operation, use this option in combination
with setting the DataWriter’s serialize_key_with_dispose field
(in the DATA_WRITER_PROTOCOL QosPolicy (DDS Exten-
sion) (Section 6.5.2)) to TRUE.
See Propagating Serialized Keys with Disposed-Instance Noti-
fications (Section 6.5.2.5).
DDS_RtpsReliable-
ReaderProtocol_t
rtps_reliable_reader See Table 7.19
Table 7.19 DDS_RtpsReliableReaderProtocol_t
Type Field Name Description
DDS_Duration_t heartbeat_suppression_duration
How long additionally received heartbeats are sup-
pressed.
When a reliable DataReader receives consecutive heart-
beats within a short duration, this may trigger redun-
dant NACKs. To prevent the DataReader from sending
redundant NACKs, the DataReader may ignore the lat-
ter heartbeat(s) for this amount of time.
DDS_Duration_t min_heartbeat_response_delay
Minimum delay between when the DataReader
receives a heartbeat and when it sends an ACK/
NACK.
DDS_Duration_t max_heartbeat_response_delay
Maximum delay between when the DataReader
receives a heartbeat and when it sends an ACK/
NACK. Increasing this value helps prevent NACK
storms, but increases latency.
DDS_Duration_t nack_period
Rate at which to send negative acknowledgements to
new DataWriters. See Section 7.6.1.1.
Table 7.18 DDS_DataReaderProtocolQosPolicy
Type Field Name Description

7.6 DataReader QosPolicies
7-77
7. Receiving Data
the number of DataReaders increases, the chance of packet collision also increases. All of
these conditions may lead to dropped packets which forces the DataWriter to send out
additional heartbeats that cause more simultaneous heartbeats to be sent, ultimately
resulting a network packet storm.
By forcing each DataReader to wait for a random amount of time, bounded by the mini-
mum and maximum values in this policy, before sending an ACK/NACK response to a
heartbeat, the use of the network is spread out over a period of time, decreasing the
peak bandwidth required as well as the likelihood of dropped packets due to collisions.
This can increase the overall performance of the reliable connection while avoiding a
network storm.
When a reliable DataReader first matches a reliable DataWriter, the DataReader sends peri-
odic NACK messages at the specified period to pull historical data from the DataWriter.
The DataReader will stop sending periodic NACKs when it has received all historical
data available at the time that it matched the DataWriter. The DataReader ensures that at
least one NACK is sent per period; for example, if, within a NACK period, the
DataReader responds to a HEARTBEAT message with a NACK, then the DataReader will
not send another periodic NACK.
7.6.1.2 Properties
This QosPolicy cannot be modified after the DataReader is created.
It only applies to DataReaders, so there are no restrictions for setting it compatibly with
respect to DataWriters.
7.6.1.3 Related QosPolicies
❏ DATA_WRITER_PROTOCOL QosPolicy (DDS Extension) (Section 6.5.2)
❏ RELIABILITY QosPolicy (Section 6.5.17)
7.6.1.4 Applicable Entities
❏ DataReaders (Section 7.3)
7.6.1.5 System Resource Considerations
Changing the values in this policy requires making tradeoffs between minimizing
latency (decreasing min_heartbeat_response_delay), maximizing determinism
(decreasing the difference between min_heartbeat_response_delay and
max_heartbeat_response_delay), and minimizing network collisions/spreading out
the ACK/NACK packets across a time interval (increasing the difference between

Chapter 7
7-78
min_heartbeat_response_delay and min_heartbeat_response_delay and/or shifting
their values between different DataReaders).
If the values are poorly chosen with respect to the characteristics and requirements of a
given application, the latency and/or throughput of the application may suffer.
7.6.2 DATA_READER_RESOURCE_LIMITS QosPolicy (DDS Extension)
The DATA_READER_RESOURCE_LIMITS QosPolicy extends your control over the
memory allocated by RTI Data Distribution Service for DataReaders beyond what is
offered by the RESOURCE_LIMITS QosPolicy (Section 6.5.18). RESOURCE_LIMITS
controls memory allocation with respect to the DataReader itself: the number of samples
that it can store in the receive queue and the number of instances that it can manage
simultaneously. DATA_READER_RESOURCE_LIMITS controls memory allocation on a
per matched-DataWriter basis. The two are orthogonal.
This policy includes the members in Table 7.20,
“DDS_DataReaderResourceLimitsQosPolicy,” on page 7-79. For defaults and valid
ranges, please refer to the online documentation.
DataReaders must allocate internal structures to handle: the maximum number of
DataWriters that may connect to it; whether or not a DataReader handles data fragmenta-
tion and how many data fragments that it may handle (for data samples larger than the
MTU of the underlying network transport); how many simultaneous outstanding loans
of internal memory holding data samples can be provided to user code; as well as oth-
ers.
Most of these internal structures start at an initial size and, by default, will grow as
needed by dynamically allocating additional memory. You may set fixed, maximum
sizes for these internal structures if you want to bound the amount of memory that can
be used by a DataReader. Setting the initial size to the maximum size will prevent RTI
Data Distribution Service from dynamically allocating any memory after the DataReader is
created.
This policy also controls how the allocated internal data structure may be used. For
example, DataReaders need data structures to keep track of all of the DataWriters that
may be sending it data samples. The total number of DataWriters that it can keep track of
is set by the initial_remote_writers and max_remote_writers values. For keyed Topics,
initial_remote_writers_per_instance and max_remote_writers_per_instance control
the number of DataWriters allowed by the DataReader to modify the value of a single
instance.
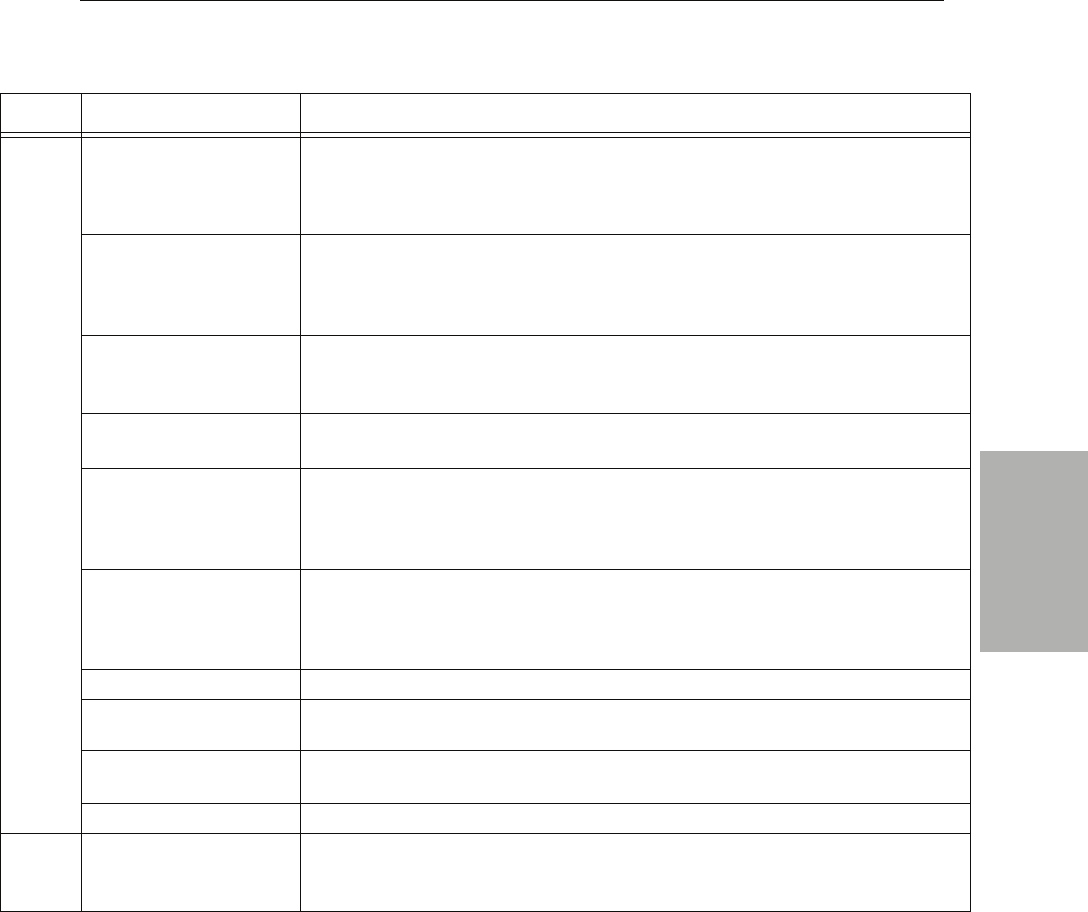
7.6 DataReader QosPolicies
7-79
7. Receiving Data
Table 7.20 DDS_DataReaderResourceLimitsQosPolicy
Type Field Name Description
DDS_
Long
max_remote_writers
Maximum number of DataWriters from which a DataReader may receive data sam-
ples, among all instances.
For unkeyed Topi cs : max_remote_writers must =
max_remote_writers_per_instance
max_remote_writers_
per_instance
Maximum number of DataWriters from which a DataReader may receive data sam-
ples for a single instance.
For unkeyed Topi cs : max_remote_writers must =
max_remote_writers_per_instance
max_samples_
per_remote_writer
Maximum number of samples received out-of-order that a DataReader can store
from a single reliable DataWriter.
max_samples_per_remote_writer must be <= RESOURCE_LIMITS::max_samples
max_infos
Maximum number of DDS_SampleInfo structures that a DataReader can allocate.
max_infos must be >= RESOURCE_LIMITS::max_samples
initial_remote_writers
Initial number of DataWriters from which a DataReader may receive data samples,
including all instances.
For unkeyed Topics: initial_remote_writers must =
initial_remote_writers_per_instance
initial_remote_writers_
per_instance
Initial number of DataWriters from which a DataReader may receive data samples
for a single instance.
For unkeyed Topi cs : initial_remote_writers must =
initial_remote_writers_per_instance
initial_infos Initial number of DDS_SampleInfo structures that a DataReader will allocate.
initial_outstanding_reads
Initial number of times in which memory can be concurrently loaned via read/take
calls without being returned with return_loan().
max_outstanding_reads
Maximum number of times in which memory can be concurrently loaned via read/
take calls without being returned with return_loan().
max_samples_per_read Maximum number of samples that can be read/taken on a DataReader.
DDS_
Boolean
disable_fragmentation_
support
Determines whether the DataReader can receive fragmented samples.
When fragmentation support is not needed, disabling fragmentation support will
save some memory resources.

Chapter 7
7-80
DDS_
Long
max_fragmented_
samples
The maximum number of samples for which the DataReader may store fragments at
a given point in time.
At any given time, a DataReader may store fragments for up to
max_fragmented_samples samples while waiting for the remaining fragments.
These samples need not have consecutive sequence numbers and may have been
sent by different DataWriters. Once all fragments of a sample have been received,
the sample is treated as a regular sample and becomes subject to standard QoS set-
tings, such as max_samples. RTI Data Distribution Service will drop fragments if the
max_fragmented_samples limit has been reached.
For best-effort communication, RTI Data Distribution Service will accept a fragment
for a new sample, but drop the oldest fragmented sample from the same remote
writer.
For reliable communication, RTI Data Distribution Service will drop fragments for
any new samples until all fragments for at least one older sample from that writer
have been received.
Only applies if disable_fragmentation_support is DDS_BOOLEAN_FALSE.
initial_fragmented_
samples
The initial number of samples for which a DataReader may store fragments.
Only applies if disable_fragmentation_support is DDS_BOOLEAN_FALSE.
max_fragmented_
samples_per_remote_
writer
The maximum number of samples per remote writer for which a DataReader may
store fragments. This is a logical limit, so a single remote writer cannot consume all
available resources.
Only applies if disable_fragmentation_support is DDS_BOOLEAN_FALSE.
max_fragments_per_
sample
Maximum number of fragments for a single sample.
Only applies if disable_fragmentation_support is DDS_BOOLEAN_FALSE.
Table 7.20 DDS_DataReaderResourceLimitsQosPolicy
Type Field Name Description

7.6 DataReader QosPolicies
7-81
7. Receiving Data
DDS_
Boolean
dynamically_allocate_
fragmented_samples
Determines whether the DataReader pre-allocates storage for storing fragmented
samples.
By default, RTI Data Distribution Service will allocate memory up front for storing
fragments for up to initial_fragmented_samples samples. This memory may grow
up to max_fragmented_samples if needed.
If dynamically_allocate_fragmented_samples is set to DDS_BOOLEAN_TRUE, RTI
Data Distribution Service does not allocate memory up front, but instead allocates
memory from the heap upon receiving the first fragment of a new sample. The
amount of memory allocated equals the amount of memory needed to store all
fragments in the sample. Once all fragments of a sample have been received, the
sample is deserialized and stored in the regular receive queue. At that time, the
dynamically allocated memory is freed again.
This QoS setting may be useful for large, but variable-sized data types where up
front memory allocation for multiple samples based on the maximum possible
sample size may be expensive. The main disadvantage of not pre-allocating mem-
ory is that one can no longer guarantee RTI Data Distribution Service will have suffi-
cient resources at run-time. Also, dynamic memory allocation and memory freeing
at run time may not give you good performance.
Only applies if disable_fragmentation_support is DDS_BOOLEAN_FALSE.
DDS_
Long
max_total_instances
Maximum number of instances for which a DataReader will keep state.
See max_total_instances and max_instances (Section 7.6.2.1)
DDS_
Long
max_remote_virtual_
writers_per_instance
Maximum number of virtual remote writers that can be associated with an
instance.
For unkeyed types, this value is ignored.
The features of Durable Reader State and MultiChannel DataWriters, as well as RTI
Persistence Service
a
, require RTI Data Distribution Service to keep some internal state
per virtual writer and instance that is used to filter duplicate samples. These dupli-
cate samples could be coming from different DataWriter channels or from multiple
executions of RTI Persistence Service.
Once an association between a remote virtual writer and an instance is established,
it is permanent—it will not disappear even if the physical writer incarnating the
virtual writer is destroyed.
If max_remote_virtual_writers_per_instance is exceeded for an instance, RTI Data
Distribution Service will not associate this instance with new virtual writers. Dupli-
cates samples coming from these virtual writers will not be filtered on the reader.
If you are not using Durable Reader State, MultiChannel DataWriters or RTI Persis-
tence Service, you can set this property to 1 to optimize resources.
For additional information about the virtual writers see Chapter 11.
Table 7.20 DDS_DataReaderResourceLimitsQosPolicy
Type Field Name Description

Chapter 7
7-82
By setting the max value to be less than max_remote_writers, you can prevent instances
with many DataWriters from using up the resources and starving other instances. Once
the resources for keeping track of DataWriters are used up, the DataReader will not be
able to accept “connections” from new DataWriters. The DataReader will not be able to
receive data from new matching DataWriters which would be ignored.
In the reliable protocol used by RTI Data Distribution Service to support a RELIABLE set-
ting for the RELIABILITY QosPolicy (Section 6.5.17), the DataReader must temporarily
store data samples that have been received out-of-order from a reliable DataWriter. The
storage of out-of-order samples is allocated from the DataReader’s receive queue and
shared among all reliable DataWriters. The parameter max_samples_per_remote_writer
controls the maximum number of out-of-order data samples that the DataReader is
allowed to store for a single DataWriter. This value must be less than the max_samples
value set in the RESOURCE_LIMITS QosPolicy (Section 6.5.18).
max_samples_per_remote_writer allows RTI Data Distribution Service to share the lim-
ited resources of the DataReader equitably so that a single DataWriter is unable to use up
all of the storage of the DataReader while missing data samples are being resent.
When setting the values of the members, the following rules apply:
❏ max_remote_writers >= initial_remote_writers
❏ max_remote_writers_per_instance >= initial_remote_writers_per_instance
max_remote_writers_per_instance <= max_remote_writers
❏ max_infos >= initial_infos
max_infos >= RESOURCE_LIMITS::max_samples
DDS_
Long
initial_remote_virtual_
writers_per_instance
Initial number of virtual remote writers per instance.
For unkeyed types, this value is ignored.
DDS_
Long
max_query_condition_
filters
This value determines the maximum number of unique query condition content fil-
ters that a reader may create.
Each query condition content filter is comprised of both its query_expression and
query_parameters. Two query conditions that have the same query_expression will
require unique query condition filters if their query_parameters differ. Query con-
ditions that differ only in their state masks will share the same query condition fil-
ter.
a. RTI Persistence Service
is included with RTI Data Distribution Service Professional Edition and Elite Edition. It saves data samples
so they can be delivered to subscribing applications that join the system at a later time (see Chapter 21: Introduction
to RTI Persistence Service).
Table 7.20 DDS_DataReaderResourceLimitsQosPolicy
Type Field Name Description
7.6 DataReader QosPolicies
7-83
7. Receiving Data
❏ max_outstanding_reads >= initial_outstanding_reads
❏ max_remote_writers >= max_remote_writers_per_instance
❏ max_samples_per_remote_writer <= RESOURCE_LIMITS::max_samples
If any of the above are false, RTI Data Distribution Service returns the error code
DDS_RETCODE_INCONSISTENT_POLICY when setting the DataReader’s QoS.
7.6.2.1 max_total_instances and max_instances
The maximum number of instances actively managed by a DataReader is determined by
max_instances in the RESOURCE_LIMITS QosPolicy (Section 6.5.18). These instances
have associated DataWriters or samples in the DataReader’s queue and are visible to the
user through operations such as take(), read(), and get_key().
The features Durable Reader State (Section 11.4), multi-channel DataWriters
(Chapter 16), and RTI Persistence Service
1
require RTI Data Distribution Service to keep
some internal state even for instances without DataWriters or samples in the
DataReader’s queue. The additional state is used to filter duplicate samples that could be
coming from different DataWriter channels or from multiple executions of RTI Persis-
tence Service. The total maximum number of instances that will be managed by the mid-
dleware, including instances without associated DataWriters or samples, is determined
by max_total_instances.
max_total_instances must be greater than max_instances or equal to
DDS_AUTO_MAX_TOTAL_INSTANCES, which
treats max_total_instances as being equal
to
max_instances in the RESOURCE_LIMITS QosPolicy (Section 6.5.18).
When a new instance is received, RTI Data Distribution Service will check the resource
limit max_instances in the RESOURCE_LIMITS QosPolicy (Section 6.5.18). If the limit is
exceeded, RTI Data Distribution Service will drop the sample and report it as lost and
rejected. If the limit is not exceeded, RTI Data Distribution Service will check
max_total_instances. If max_total_instances is exceeded, RTI Data Distribution Service
will replace an existing instance without DataWriters and samples with the new one.
The application could receive duplicate samples for the replaced instance if it becomes
alive again.
7.6.2.2 Example
The max_samples_per_remote_writer value affects sharing and starvation.
max_samples_per_remote_writer can be set to less than the RESOURCE_LIMITS
1. RTI Persistence Service is included with RTI Data Distribution Service Professional Edition and Elite Edition.
It saves data samples so they can be delivered to subscribing applications that join the system at a later time
(see Chapter 21: Introduction to RTI Persistence Service).

Chapter 7
7-84
QosPolicy’s max_samples to prevent a single DataWriter from starving others. This con-
trol is especially important for To pi cs that have their OWNERSHIP QosPolicy (Section
6.5.13) set to SHARED.
In the case of EXCLUSIVE ownership, a lower-strength remote DataWriter can "starve"
a higher-strength remote DataWriter by making use of more of the DataReader's
resources, an undesirable condition. In the case of SHARED ownership, a remote
DataWriter may starve another remote DataWriter, making the sharing not really equal.
7.6.2.3 Properties
This QosPolicy cannot be modified after the DataReader is created.
It only applies to DataReaders, so there are no restrictions for setting it compatibly on the
DataWriter.
7.6.2.4 Related QosPolicies
❏ RESOURCE_LIMITS QosPolicy (Section 6.5.18)
❏ OWNERSHIP QosPolicy (Section 6.5.13)
7.6.2.5 Applicable Entities
❏ DataReaders (Section 7.3)
7.6.2.6 System Resource Considerations
Increasing any of the “initial” values in this policy will increase the amount of memory
allocated by RTI Data Distribution Service when a new DataReader is created. Increasing
any of the “max” values will not affect the initial memory allocated for a new
DataReader, but will affect how much additional memory may be allocated as needed
over the DataReader’s lifetime.
Setting a max value greater than an initial value thus allows your application to use
memory more dynamically and efficiently in the event that the size of the application is
not well-known ahead of time. However, the RTI Data Distribution Service may dynami-
cally allocate memory in response to network communications.
7.6.3 READER_DATA_LIFECYCLE QoS Policy
This policy controls the behavior of the DataReader with regards to the lifecycle of the
data instances it manages, that is, the data instances that have been received and for
which the DataReader maintains some internal resources.

7.6 DataReader QosPolicies
7-85
7. Receiving Data
When a DataReader receives data, it is stored in a receive queue for the DataReader. The
user application may either take the data from the queue or leave it there. This QoS con-
trols whether or not RTI Data Distribution Service will automatically remove data from
the receive queue (so that user applications cannot access it afterwards) when RTI Data
Distribution Service detects that there are no more DataWriters alive for that data.
DataWriters may also call dispose() on its data, informing DataReaders that the data no
longer exists. This QosPolicy also controls whether or not RTI Data Distribution Service
automatically removes disposed data from the receive queue.
For keyed Topics, the consideration of removing data samples from the receive queue is
done on a per instance (key) basis. Thus when RTI Data Distribution Service detects that
there are no longer DataWriters alive for a certain key value for a Top ic (an instance of the
Topic), it can be configured to remove all data samples for a certain instance (key).
DataWriters also can dispose its data on a per instance basis. Only the data samples of
disposed instances would be removed by RTI Data Distribution Service if so configured.
This policy helps purge untaken samples from not-alive-instances and thus may pre-
vent a DataReader from reclaiming resources. With this policy, the untaken samples from
not-alive-instances are purged and treated as if the samples were taken after the speci-
fied amount of time.
The DataReader internally maintains the samples that have not been taken by the appli-
cation, subject to the constraints imposed by other QoS policies such as HISTORY
QosPolicy (Section 6.5.8) and RESOURCE_LIMITS QosPolicy (Section 6.5.18).
The DataReader also maintains information regarding the identity, view-state, and
instance-state of data instances, even after all samples have been ‘taken’ (see
Section 7.4.3). This is needed to properly compute the states when future samples
arrive.
Under normal circumstances, a DataReader can only reclaim all resources for instances
for which there are no DataWriters and for which all samples have been ‘taken.’ The last
sample taken by the DataReader for that instance will have an instance state of
NOT_ALIVE_NO_WRITERS or NOT_ALIVE_DISPOSED_INSTANCE (depending on
whether or not the instance was disposed by the last DataWriter that owned it.) If you
are using the default (infinite) values for this QosPolicy, this behavior can cause prob-
lems if the application does not ‘take’ those samples for some reason. The ‘untaken’
samples will prevent the DataReader from reclaiming the resources and they would
remain in the DataReader indefinitely.

Chapter 7
7-86
It includes the members in Table 7.21.
❏ autopurge_nowriter_samples_delay This defines the maximum duration for
which the DataReader will maintain information regarding an instance once its
instance_state becomes NOT_ALIVE_NO_WRITERS. After this time elapses,
the DataReader will purge all internal information regarding the instance, any
untaken samples will also be lost.
❏ autopurge_disposed_samples_delay This defines the maximum duration for
which the DataReader will maintain samples of an instance once its
instance_state becomes NOT_ALIVE_DISPOSED. After this time elapses, the
DataReader will purge all internal information regarding the instance; any
untaken samples will also be lost.
7.6.3.1 Properties
This QoS policy can be modified after the DataReader is enabled.
It only applies to DataReaders, so there are no RxO restrictions for setting it compatibly
on the DataWriter.
7.6.3.2 Related QoS Policies
❏ HISTORY QosPolicy (Section 6.5.8)
❏ LIVELINESS QosPolicy (Section 6.5.11)
❏ OWNERSHIP QosPolicy (Section 6.5.13)
❏ RESOURCE_LIMITS QosPolicy (Section 6.5.18)
❏ WRITER_DATA_LIFECYCLE QoS Policy (Section 6.5.24)
Table 7.21 DDS_ReaderDataLifecycleQosPolicy
Type Field Name Description
DDS_Duration_t
autopurge_nowriter_
samples_delay
How long the DataReader maintains information
about an instance once its instance_state becomes
NOT_ALIVE_NO_WRITERS.
DDS_Duration_t
autopurge_disposed_
samples_delay
How long the DataReader maintains information
about an instance once its instance_state becomes
NOT_ALIVE_DISPOSED.

7.6 DataReader QosPolicies
7-87
7. Receiving Data
7.6.3.3 Applicable Entities
❏ DataReaders (Section 7.3)
7.6.3.4 System Resource Considerations
None.
7.6.4 TIME_BASED_FILTER QosPolicy
The TIME_BASED_FILTER QosPolicy allows you to specify that data should not be
delivered more than once per specified period for data-instances of a DataReader—
regardless of how fast DataWriters are publishing new samples of the data-instance.
This QoS policy allows you to optimize resource usage (CPU and possibly network
bandwidth) by only delivering the required amount of data to different DataReaders.
DataWriters may send data faster than needed by a DataReader. For example, a
DataReader of sensor data that is displayed to a human operator in a GUI application
does not need to receive data updates faster than a user can reasonably perceive
changes in data values. This is often measure in tenths (0.1) of a second up to several
seconds. However, a DataWriter of sensor information may have DataReaders that are
processing the sensor information to control parts of the system and thus need new data
updates in measures of hundredths (0.01) or thousandths (0.001) of a second.
With this QoS policy, different DataReaders can set their own time-based filters, so that
data published faster than the period set by a DataReader will be dropped by the middle-
ware and not delivered to the DataReader. Note that all filtering takes place on the reader
side.
It includes the member in Table 7.22. For the default and valid range, please refer to the
online documentation.
As seen in Figure 7.18, it is inconsistent to set a DataReader’s minimum_separation lon-
ger than its DEADLINE QosPolicy (Section 6.5.4) period.
Table 7.22 DDS_TimeBasedFilterQosPolicy
Type Field Name Description
DDS_Duration_t minimum_separation
Minimum separation time between samples of the
same instance.
Must be <= DEADLINE::period

Chapter 7
7-88
This QosPolicy allows a DataReader to subsample the data being published for a data
instance by DataWriters. If a user application only needs new samples for a data instance
to be received at a specified period, then there is no need for RTI Data Distribution Service
to deliver data faster than that period. However, whether or not data being published
by a DataWriter at a faster rate than set by the TIME_BASED_FILTER QoS is sent on the
wire depends on several factors, including whether the DataReader is receiving the data
reliably and if the data is being sent via multicast for multiple DataReaders.
For best effort, unicast data delivery, if the data type is unkeyed and the DataWriter has
an infinite liveliness lease_duration (LIVELINESS QosPolicy (Section 6.5.11)), RTI Data
Distribution Service will only send as many packets to a DataReader as required by the
TIME_BASED_FILTER, no matter how fast the DataWriter’s write() function is called.
Other configurations (for example, when the DataWriter is reliable, or the data type is
keyed, or the DataWriter has finite a liveliness lease_duration) must send all data pub-
lished by the DataWriter. On reception, only the data that passes the
TIME_BASED_FILTER will be stored in the DataReader’s receive queue. Extra data will
be accepted but dropped. Note that filtering is only applied on ‘alive’ samples (that is,
samples that have not been disposed/unregistered).
Data samples for a DataReader can be filtered out using the TIME_BASED_FILTER QoS
(minimum_separation). Once a data sample for an instance has been received, RTI Data
Distribution Service will accept but drop any new data samples for the same instance that arrives
within the time specified by minimum_separation. After the minimum_separation, a new
sample that arrives is accepted and stored in the receive queue, and the timer starts again. If no
samples arrive by the DEADLINE, the REQUESTED_DEADLINE_MISSED status will be
changed and Listeners called back if installed.
Figure 7.18 Accepting Data for DataReaders
Minimum_
Separation
REQUESTED_DEADLINE_
MISSED
status changes if
no sample received for
instance
New sample for instance will
be accepted
Data received for same
instance is dropped
Deadline
Time
Last data sample is
eceived

7.6 DataReader QosPolicies
7-89
7. Receiving Data
7.6.4.1 Example
The purpose of this QosPolicy is to prevent fast DataWriters from overwhelming a
DataReader that cannot process the data at the rate the data is being published. In certain
configurations, the number of packets sent by RTI Data Distribution Service can also be
reduced thus minimizing the consumption of network bandwidth.
You may want to change the minimum_separation between data samples for one or
more of the following reasons:
❏ The DataReader is connected to the network via a low-bandwidth connection that
is unable to sustain the amount of traffic generated by the matched DataWriter(s).
❏ The rate at which the matched DataWriter(s) can generate samples is faster than
the rate at which the DataReader can process them. Or faster than needed by the
DataReader. For example, a graphical user interface seldom needs to be updated
faster than 30 times a second, even if new data values are available much faster.
❏ The resource limits of the DataReader are constrained relative to the number of
samples that could be generated by the matched DataWriter(s). Too many packets
coming at once will cause them to be exhausted before the DataReader has time to
process them.
7.6.4.2 Properties
This QosPolicy can be modified at any time.
It only applies to DataReaders, so there are no restrictions for setting it compatibly on the
DataWriter.
7.6.4.3 Related QosPolicies
❏ RELIABILITY QosPolicy (Section 6.5.17)
❏ DEADLINE QosPolicy (Section 6.5.4)
❏ TRANSPORT_MULTICAST QosPolicy (DDS Extension) (Section 7.6.5)
7.6.4.4 Applicable Entities
❏ DataReaders (Section 7.3)
Chapter 7
7-90
7.6.4.5 System Resource Considerations
Depending on the values of other QosPolicies such as RELIABILITY and
TRANSPORT_MULTICAST, this policy may be able to decrease the usage of network
bandwidth and CPU by preventing unneeded packets from being sent and processed.
7.6.5 TRANSPORT_MULTICAST QosPolicy (DDS Extension)
This QosPolicy specifies the multicast address on which a DataReader wants to receive
its data. It can also specify a port number as well as a subset of the available transports
with which to receive the multicast data.
By default, DataWriters will send individually addressed packets for each DataReader
that subscribes to the topic of the DataWriter—this is known as unicast delivery. Thus, as
many copies of the data will be sent over the network as there are DataReaders for the
data. The network bandwidth used by a DataWriter will thus increase linearly with the
number of DataReaders.
Multicast is a concept supported by some transports, most notably UDP/IP, so that a
single packet on the network can be addressed such that it is received by multiple nodes.
This is more efficient when the same data needs to be sent to multiple nodes. By using
multicast, the network bandwidth usage will be constant, independent of the number of
DataReaders.
Coordinating the multicast address specified by DataReaders can help optimize network
bandwidth usage in systems where there are multiple DataReaders for the same DDS
topic.
The QosPolicy structure includes the members in Table 7.23.
To take advantage of multicast, the value of this QosPolicy must be coordinated among
all of the applications on a network for DataReaders of the same Top ic . For a DataWriter to
send a single packet that will be received by all DataReaders simultaneously, the same
multicast address must be used.
To use this QosPolicy, you will also need to specify a port number. A port number of 0
will cause RTI Data Distribution Service to automatically use a default value. As
Table 7.23 DDS_TransportMulticastQosPolicy
Type Field Name Description
DDS_TransportMulticastSettingSeq
(A sequence of the type shown in Table 7.24)
value
A sequence of multicast locators.
(See Locator Format (Section
12.2.1.1).)

7.6 DataReader QosPolicies
7-91
7. Receiving Data
explained in Ports Used for Discovery (Section 12.5), the default port number for multi-
cast addresses is based on the domain ID. Should you choose to use a different port
number, then for every unique port number used by Entities in your application,
depending on the transport, RTI Data Distribution Service may create a thread to process
messages received for that port on that transport. See Chapter 17: RTI Data Distribution
Service Threading Model for more about threads.
Threads are created on a per-transport basis, so if this QosPolicy specifies multiple
transports for a receive_port, then a thread may be created for each transport for that
unique port. Some transports may be able to share a single thread for different ports,
others can not. Note that different Entities can share the same port number, and thus,
the same thread will process all of the data for all of the Entities sharing the same port
number for a transport.
Also note that if the port number specified by this QoS is the same as a port number
specified by a TRANSPORT_UNICAST QoS, then the transport may choose to process
data received both via multicast and unicast with a single thread. Whether or not a
transport must use different threads to process data received via multicast or unicast for
the same port number depends on the implementation of the transport.
Notes:
❏ The same multicast address can be used by DataReaders of different To pi cs .
❏ Even though the TRANSPORT_MULTICAST QoS allows you to specify multiple
multicast addresses for a DataReader, RTI Data Distribution Service currently only
uses one multicast address (the first in the sequence) per DataReader.
Table 7.24 DDS_TransportMulticastSetting_t
Type Field Name Description
DDS_StringSeq transports
A sequence of transport aliases that specifies which trans-
ports should be used to receive multicast messages for
this DataReader.
char * receive_address
A multicast group address to which the DataWriter
should send data for this DataReader.
DDS_Long receive_port
The port that should be used in the addressing of multi-
cast messages destined for this DataReader. A value of 0
will cause RTI Data Distribution Service to use a default
port number based on domain id. See Ports Used for Dis-
covery (Section 12.5).

Chapter 7
7-92
❏ If a DataWriter is using the MULTI_CHANNEL QosPolicy (DDS Extension) (Sec-
tion 6.5.12), the multicast addresses specified in the TRANSPORT_MULTICAST
QosPolicy are ignored by that DataWriter. The DataWriter will not publish sam-
ples on those locators.
7.6.5.1 Example
In an airport, there may be many different monitors that display current flight informa-
tion. Assuming each monitor is controlled by a networked application, network band-
width would be greatly reduced if flight information was published using multicast.
Figure 7.19 shows an example of how to set this QosPolicy.
Figure 7.19 Setting Up a Multicast DataReader
...
DDS_DataReaderQos reader_qos;
reader_listener = new HelloWorldListener();
if (reader_listener == NULL) {
// handle error
}
// Get default data reader QoS to customize
retcode = subscriber->get_default_datareader_qos(reader_qos);
if (retcode != DDS_RETCODE_OK) {
// handle error
}
// Set up multicast reader
reader_qos.multicast.value.ensure_length(1,1);
reader_qos.multicast.value[0].receive_address =
DDS_String_dup("239.192.0.1");
reader = subscriber->create_datareader(topic,
reader_qos,
reader_listener,
DDS_STATUS_MASK_ALL);

7.6 DataReader QosPolicies
7-93
7. Receiving Data
7.6.5.2 Properties
This QosPolicy cannot be modified after the Entity is created.
For compatibility between DataWriters and DataReaders, the DataWriter must be able to
send to the multicast address that the DataReader has specified.
7.6.5.3 Related QosPolicies
❏ MULTI_CHANNEL QosPolicy (DDS Extension) (Section 6.5.12)
❏ TRANSPORT_UNICAST QosPolicy (DDS Extension) (Section 6.5.21)
❏ TRANSPORT_BUILTIN QosPolicy (DDS Extension) (Section 8.5.8)
7.6.5.4 Applicable Entities
❏ DomainParticipants (Section 8.3)
❏ DataReaders (Section 7.3)
7.6.5.5 System Resource Considerations
On Ethernet-based systems, the number of multicast addresses that can be “listened” to
by the network interface card is usually limited. The exact number of multicast
addresses that can be monitored simultaneously by a NIC depends on its manufacturer.
Setting a multicast address for a DataReader will use up one of the multicast-address
slots of the NIC.
What happens if the number of different multicast addresses used by different
DataReaders across different applications on the same node exceeds the total number
supported by a NIC depends on the specific operating system. Some will prevent you
from configuring too many multicast addresses to be monitored.
Many operating systems will accommodate the extra multicast addresses by putting the
NIC in promiscuous mode. This means that the NIC will pass every Ethernet packet to
the operating system, and the operating system will pass the packets with the specified
multicast addresses to the application(s). This results in extra CPU usage. We recom-
mend that your applications do not use more multicast addresses on a single node than
the NICs on that node can listen to simultaneously in hardware.
Depending on the implementation of a transport, RTI Data Distribution Service may need
to create threads to receive and process data on a unique-port-number basis. Some
transports can share the same thread to process data received for different ports; others
like UDPv4 must have different threads for different ports. In addition, if the same port
is used for both unicast and multicast, the transport implementation will determine


8-1
8. Domains
Chapter 8 Working with Domains
This chapter discusses how to use DomainParticipants. It describes the types of opera-
tions that are available for them and their QosPolicies.
This chapter includes the following sections:
❏ Fundamentals of Domains and DomainParticipants (Section 8.1)
❏ DomainParticipantFactory (Section 8.2)
❏ DomainParticipants (Section 8.3)
❏ DomainParticipantFactory QosPolicies (Section 8.4)
❏ DomainParticipant QosPolicies (Section 8.5)
❏ Clock Selection (Section 8.6)
The goal of this chapter is to help you become familiar with the objects you need for set-
ting up your RTI Data Distribution Service application. For specific details on any men-
tioned operations, see the online documentation.
8.1 Fundamentals of Domains and DomainParticipants
DomainParticipants are the focal point for creating, destroying, and managing other RTI
Data Distribution Service objects. A DDS domain is a logical network of applications:
only applications that belong to the same DDS domain may communicate using RTI
Data Distribution Service. A domain is identified by a unique integer value known as a
domain ID. An application participates in a domain by creating a DomainParticipant for
that domain ID.
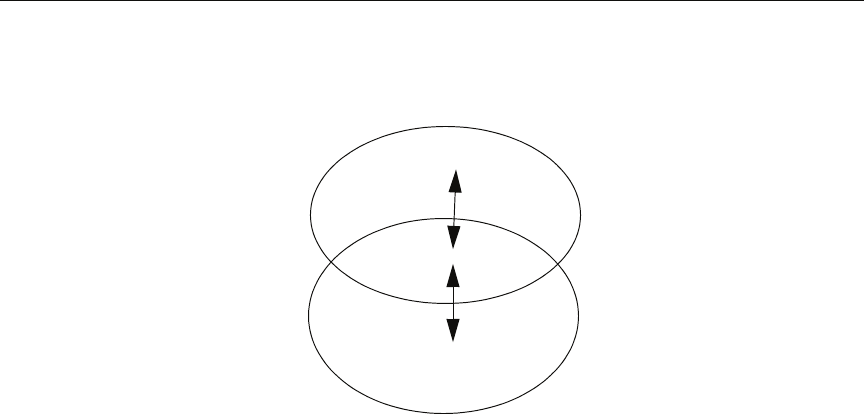
Chapter 8
8-2
As seen in Figure 8.1, a single application can participate in multiple domains by creat-
ing multiple DomainParticipants with different domain IDs. DomainParticipants in the
same domain form a logical network; they are isolated from DomainParticipants of other
domains, even those running on the same set of physical computers sharing the same
physical network. DomainParticipants in different domains will never exchange mes-
sages with each other. Thus, a domain establishes a “virtual network” linking all
DomainParticipants that share the same domain ID.
An application that wants to participate in a certain domain will need to create a
"Domain Participant." As seen in Figure 8.2, a DomainParticipant object is a container for
all other DDS Entities that belong to the same domain. It acts as factory for the Publisher,
Subscriber, and Top ic entities. (As seen in Chapters 6 and 7, in turn, Publishers are facto-
ries for DataWriters and Subscribers are factories for DataReaders.) DomainParticipants
cannot contain other DomainParticipants.
Like all DDS Entities, DomainParticipants have QosPolicies and Listeners. The DomainPar-
ticipant entity also allows you to set ‘default’ values for the QosPolicies for all the enti-
ties created from it or from the entities that it creates (Publishers, Subscribers, To pic s,
DataWriters, and DataReaders).
Figure 8.1 Relationship between Applications and Domains
Application A
Application B
Application C
Domain-1
Domain-2
Applications can belong to multiple domains—A belongs to domains 1 and 2. Applications in
the same domain can communicate with each other, such as A and B, or A and C. Applications in
different domains, such as B and C, are not even aware of each other and will not exchange
messages.

8.1 Fundamentals of Domains and DomainParticipants
8-3
8. Domains
Figure 8.2 Domain Module
Note: MultiTopics are not currently supported.

Chapter 8
8-4
8.2 DomainParticipantFactory
The main purpose of a DomainParticipantFactory is to create and destroy DomainPartici-
pants.
In C++ terms, this is a singleton class; that is, you will only have a single DomainPartici-
pantFactory in an application—no matter how many DomainParticipants the application
may create. Figure 8.3 shows how to instantiate a DomainParticipantFactory. Notice that
there are no parameters to specify. Alternatively, in C++, C++/CLI, and C#, the pre-
defined macro, DDSTheParticipantFactory,
1
can also be used to retrieve the singleton
factory.
Unlike the other DDS Entities that you create, the DomainParticipantFactory does not
have an associated Listener. However, it does have associated QosPolicies, see
Section 8.2.1. You can change them using the factory’s get_qos() and set_qos() opera-
tions. The DomainParticipantFactory also stores the default QoS settings that can be used
when a DomainParticipant is created. These default settings can be changed as well, see
Section 8.3.6.4.
Once you have a DomainParticipantFactory, you can use it to perform the operations
listed in Table 8.1. The most important one is create_participant(), described in
Section 8.3.1. For more details on all operations, see the online documentation as well as
the section of the manual listed in the Reference column.
1. In C, the macro is DDS_TheParticipantFactory. In Java, use the static class method DomainPartici-
pantFactory.TheParticipantFactory.
Figure 8.3 Instantiating a DomainParticipantFactory
DDSDomainParticipantFactory* factory = NULL;
factory = DDSDomainParticipantFactory::get_instance();
if (factory == NULL) {
// ... error
}

8.2 DomainParticipantFactory
8-5
8. Domains
Table 8.1 DomainParticipantFactory Operations
Working
with ...
Operation Description Reference
Domain-
Participants
create_participant Creates a DomainParticipant.
Section 8.3.1
create_participant_with_
profile
Creates a DomainParticipant based on
a QoS profile.
delete_participant Deletes a DomainParticipant. Section 8.3.2
get_default_participant_qos
Gets the default QoS for DomainPar-
ticipants.
Section 8.2.2
lookup_participant
Finds a specific DomainParticipant,
based on a domain ID.
Section 8.2.4
set_default_participant_qos
Sets the default QoS for DomainPar-
ticipants.
Section 8.2.2
set_default_participant_
qos_with_profile
Sets the default QoS for DomainPartic-
ipants based on a QoS profile.
The
Factory’s
Instance
get_instance
Gets the singleton instance of this
class.
Section 8.2.3
finalize_instance
Destroys the singleton instance of this
class.
The
Factory’s
Own QoS
get_qos
Gets/sets the DomainParticipantFac-
tory’s QoS.
Section 4.1.7
set_qos
Chapter 8
8-6
Profiles &
Libraries
get_default_library
Gets the default library for a Domain-
ParticipantFactory.
Section 8.2.1.1
get_default_profile
Gets the default QoS profile for a
DomainParticipantFactory.
get_default_profile_library
Gets the library that contains the
default QoS profile for a DomainPar-
ticipantFactory.
get_<entity>_qos_from_
profile
Gets the <entity> QoS values associ-
ated with a specified QoS profile.
<entity> may be topic, datareader,
datawriter, subscriber, publisher, or par-
ticipant.
Section 8.2.5
get_<entity>_qos_from_
profile_w_topic_name
Like get_<entity>_qos_from_profile(),
but this operation allows you to spec-
ify a topic name associated with the
entity. The topic filter expressions in
the profile will be evaluated on the
topic name.
<entity> may be topic, datareader, or
datawriter.
get_qos_profiles
Gets the names of all XML QoS pro-
files associated with a specified XML
QoS profile library.
Section 15.8.5
get_qos_profile_libraries
Gets the names of all XML QoS pro-
file libraries associated with the
DomainParticipantFactory.
Section 15.9.1
load_profiles
Explicitly loads or reloads the QoS
profiles.
Section 15.2.1
reload_profiles
set_default_profile
Sets the default QoS profile for a
DomainParticipantFactory.
Section 8.2.1.1
set_default_library
Sets the default library for a Domain-
ParticipantFactory.
unload_profiles
Frees the resources associated with
loading QoS profiles.
Section 15.2.1
Table 8.1 DomainParticipantFactory Operations
Working
with ...
Operation Description Reference
8.2 DomainParticipantFactory
8-7
8. Domains
8.2.1 Setting DomainParticipantFactory QosPolicies
The DDS_DomainParticipantFactoryQos structure has the following format:
struct DDS_DomainParticipantFactoryQos {
DDS_EntityFactoryQosPolicy entity_factory;
DDS_SystemResourceLimitsQosPolicy resource_limits;
DDS_ProfileQosPolicy profile;
};
For information on why you would want to change a particular QosPolicy, see the sec-
tion referenced in Table 8.2.
8.2.1.1 Getting and Setting the DomainParticipantFactory’s Default QoS Profile and Library
You can retrieve the default QoS profile for the DomainParticipantFactory with the
get_default_profile() operation. You can also get the default library for the DomainPar-
ticipantFactory, as well as the library that contains the DomainParticipantFactory’s
default profile (these are not necessarily the same library); these operations are called
get_default_library() and get_default_library_profile(), respectively. These operations
are for informational purposes only (that is, you do not need to use them as a precursor
to setting a library or profile.) For more information, see Chapter 15: Configuring QoS
with XML.
virtual const char * get_default_library ()
const char * get_default_profile ()
const char * get_default_profile_library ()
Table 8.2 DomainParticipantFactory QoS
QosPolicy Description
EntityFactory
Controls whether or not child entities are created in the enabled state.
See Section 6.4.2.
Profile
Configures the way that XML documents containing QoS profiles are
loaded by RTI. See Section 8.4.1.
SystemResource-Limits
Configures DomainParticipant-independent resources used by RTI Data
Distribution Service. Mainly used to change the maximum number of
DomainParticipants that can be created within a single process (address
space). See Section 8.4.2.

Chapter 8
8-8
There are also operations for setting the DomainParticipantFactory’s default library and
profile:
DDS_ReturnCode_t set_default_library (const char * library_name)
DDS_ReturnCode_t set_default_profile (const char * library_name,
const char * profile_name)
set_default_profile() specifies the profile that will be used as the default the next time a
default DomainParticipantFactory profile is needed during a call to a DomainPartici-
pantFactory operation.
When calling a DomainParticipantFactory operation that requires a profile_name
parameter, you can use NULL to refer to the default profile. (This same information
applies to setting a default library.)
set_default_profile() does not set the default QoS for the DomainParticipant that can be
created by the DomainParticipantFactory. To set the default QoS using a profile, use the
DomainParticipantFactory’s set_default_participant_qos_with_profile() operation (see
Section 8.2.2).
8.2.2 Getting and Setting Default QoS for DomainParticipants
To get the default QoS that will be used for creating DomainParticipants if
create_participant() is called with DDS_PARTICIPANT_QOS_DEFAULT as the ‘qos’
parameter, use this DomainParticipantFactory operation:
DDS_ReturnCode_t get_default_participant_qos (
DDS_DomainParticipantQos & qos)
This operation gets the QoS settings that were specified on the last successful call to
set_default_participant_qos() or set_default_participant_qos_with_profile(), or else, if
the call was never made, the default values listed in DDS_DomainParticipantQos.
To set the default QoS that will be used for new DomainParticipants, use the following
operations. Then these default QoS will be used if create_participant() is called with
DDS_PARTICIPANT_QOS_DEFAULT as the ‘qos’ parameter.
DDS_ReturnCode_t set_default_participant_qos (
const DDS_DomainParticipantQos &qos)
or
DDS_ReturnCode_t set_default_participant_qos_with_profile (
const char *library_name,
const char *profile_name)

8.2 DomainParticipantFactory
8-9
8. Domains
Notes:
❏ These operations may potentially allocate memory, depending on the sequences
contained in some QoS policies.
❏ It is not safe to set the default DomainParticipant QoS values while another thread
may be simultaneously calling get_default_participant_qos(),
set_default_participant_qos(), or create_participant() with
DDS_PARTICIPANT_QOS_DEFAULT as the qos parameter. It is also not safe to
get the default DomainParticipant QoS values while another thread may be simul-
taneously calling set_default_participant_qos().
8.2.3 Freeing Resources Used by the DomainParticipantFactory
The finalize_instance() operation explicitly reclaims resources used by the participant
factory singleton (including resources use for QoS profiles).
On many operating systems, these resources are automatically reclaimed by the OS
when the program terminates. However, some memory-check tools will flag those
resources as unreclaimed. This method provides a way to clean up all the memory used
by the participant factory.
Before calling finalize_instance() on a DomainParticipantFactory, all of the participants
created by the factory must have been deleted. For a DomainParticipant to be success-
fully deleted, all Entities created by the participant or by the Entities that the participant
created must have been deleted. In essence, the DomainParticipantFactory cannot be
deleted until all other DDS Entities have been deleted in an application.
Except for Linux systems: get_instance() and finalize_instance() are UNSAFE on the
FIRST call. It is not safe for two threads to simultaneously make the first call to get or
finalize the factory instance. Subsequent calls are thread safe.
8.2.4 Looking Up a DomainParticipant
The DomainParticipantFactory has a useful operation for retrieving the handle to a par-
ticular DomainParticipant:
DDSDomainParticipant* lookup_participant (DDS_DomainId_t domainId)
8.2.5 Getting QoS Values from a QoS Profile
A QoS Profile may include configuration settings for all types of Entities. If you just
want the settings for a specific type of Entity, call get_<entity>_qos_from_profile()
(where <entity> may be participant, publisher, subscriber, datawriter, datareader, or
Chapter 8
8-10
topic). This is useful if you want to get the QoS values from the profile in a structure,
make some changes, and then use that structure to create an entity.
DDS_ReturnCode_t get_<entity>_qos_from_profile (
DDS_<Entity>Qos &qos,
const char *library_name,
const char *profile_name)
For an example, see Figure 6.5 on page 6-12.
The get_<entity>_qos_from_profile() operations do not take into account the
topic_filter attributes that may be set for DataWriter, DataReader, or Topic QoSs in pro-
files (see Section 15.8.3). If there is a topic name associated with an entity, you can call
get_<entity>_qos_from_profile_w_topic_name() (where <entity> can be datawriter,
datareader, or topic) and the topic filter expressions in the profile will be evaluated on
the topic name.
DDS_ReturnCode_t get_<entity>_qos_from_profile_w_topic_name(
DDS_<entity>Qos &qos,
const char *library_name,
const char *profile_name,
const char *topic_name)
get_<entity>_qos_from_profile() and
get_<entity>_qos_from_profile_w_topic_name() may allocate memory, depending on
the sequences contained in some QoS policies.
8.3 DomainParticipants
A DomainParticipant is a container for DDS Entity objects that all belong to the same
domain. Each DomainParticipant has its own set of internal threads and internal data
structures that maintain information about the DDS Entities created by itself and other
DomainParticipants in the same domain. A DomainParticipant is used to create and
destroy Publishers, Subscribers and Top ics.
Once you have a DomainParticipant, you can use it to perform the operations listed in
Table 8.3. For more details on all operations, see the online documentation. Some of the
first operations you’ll be interested in are create_topic(), create_subscriber(), and
create_publisher().
Note: Some operations cannot be used within a listener callback, see Restricted Opera-
tions in Listener Callbacks (Section 4.5.1).

8.3 DomainParticipants
8-11
8. Domains
Table 8.3 DomainParticipant Operations
Working
with ...
Operation Description Reference
Builtin
Subscriber
get_builtin_subscriber Returns the builtin Subscriber. Section 14.2
Domain-
Participants
add_peer Adds an entry to the peer list. Section 8.5.2.3
enable Enables the DomainParticipant. Section 4.1.2
get_discovered_participant_
data
Provides the ParticipantBuiltinTopicData for
a discovered DomainParticipant.
Section 8.3.11
get_discovered_participants
Provides a list of DomainParticipants that
have been discovered.
get_domain_id
Gets the domain ID of the DomainPartici-
pant.
Section 8.3.4
get_listener
Gets the currently installed DomainPartici-
pantListener.
Section 8.3.5
get_qos Gets the DomainParticipant QoS. Section 8.3.6
ignore_participant
Rejects the connection to a remote Domain-
Participant.
Section 14.4
set_listener Replaces the DomainParticipantListener. Section 8.3.5
set_qos Sets the DomainParticipant QoS.
Section 8.3.6
set_qos_with_profile
Sets the DomainParticipant QoS based on a
QoS profile.
Content-
Filtered-
Top ic s
create_contentfilteredtopic
Creates a ContentFilteredTopic that can be
used to process content-based subscriptions.
Section 5.4.3
create_contentfilteredtopic_
with_filter
delete_contentfilteredtopic Deletes a ContentFilteredTopic. Section 5.4.4
register_contentfilter Registers a new content filter. Section 5.4.8.1
unregister_contentfilter Unregisters a new content filter. Section 5.4.8.2
lookup_contentfilter Gets a previously registered content filter. Section 5.4.8.3

Chapter 8
8-12
DataReaders
create_datareader
Creates a DataReader with a given
DataReaderListener, and an implicit Sub-
scriber.
Section 7.3.1
create_datareader_with_
profile
Creates a DataReader based on a QoS profile,
with a given DataReaderListener, and an
implicit Subscriber.
delete_datareader
Deletes a DataReader that belongs to the
‘implicit Subscriber.’
Section 7.3.2
get_default_datareader_qos
Copies the default DataReaderQoS values
into the provided structure.
Section 8.3.6.4
ignore_subscription Rejects the connection to a DataReader
set_default_datareader_qos Sets the default DataReaderQos values.
set_default_datareader_
qos_with_profile
Sets the default DataReaderQos using val-
ues from a QoS profile.
DataWriters
create_datawriter
Creates a DataWriter with a given
DataWriterListener, and an implicit Pub-
lisher.
Section 6.2.2
create_datawriter_with_
profile
Creates a DataWriter based on a QoS profile,
with a given DataWriterListener, and an
implicit Publisher.
delete_datawriter
Deletes a DataWriter that belongs to the
‘implicit Publisher.’
Section 6.2.3
ignore_publication Rejects the connection to a DataWriter. Section 14.4
get_default_datawriter_qos
Copies the default DataWriterQos values
into the provided DataWriterQos structure.
Section 8.3.6.4set_default_datawriter_qos Sets the default DataWriterQoS values.
set_default_datawriter_
qos _with_profile
Sets the default DataWriterQos using values
from a profile.
Table 8.3 DomainParticipant Operations
Working
with ...
Operation Description Reference

8.3 DomainParticipants
8-13
8. Domains
Publishers
create_publisher Creates a Publisher and a PublisherListener.
Section 6.2.2
create_publisher_with_
profile
Creates a Publisher based on a QoS profile,
and a PublisherListener.
delete_publisher Deletes a Publisher. Section 6.2.3
get_default_publisher_qos
Copies the default PublisherQos values into
the provided PublisherQos structure.
Section 8.3.6.4
get_implicit_publisher
Gets the Publisher that is implicitly created
by the DomainParticipant.
Section 8.3.9
get_publishers
Provides a list of all Publishers owned by the
DomainParticipant.
Section 8.3.13.3
set_default_publisher_qos Sets the default PublisherQos values.
Section 8.3.6.4
set_default_publisher_qos_
with_profile
Sets the default PublisherQos using values
from a QoS profile.
Subscribers
create_subscriber
Creates a Subscriber and a
SubscriberListener.
Section 7.2.2
create_subscriber_with_
profile
Creates a Subscriber based on a QoS profile,
and a SubscriberListener.
delete_subscriber Deletes a Subscriber. Section 7.2.3
get_default_subscriber_qos
Copies the default SubscriberQos values
into the provided SubscriberQos structure.
Section 8.3.6.4
get_implicit_subscriber
Gets the Subscriber that is implicitly created
by the DomainParticipant.
Section 8.3.9
get_subscribers
Provides a list of all Subscribers owned by
the DomainParticipant.
Section 8.3.13.3
set_default_subscriber_qos Sets the default SubscriberQos values.
Section 8.3.6.4
set_default_subscriber_qos_
with_profile
Sets the default SubscriberQos values using
values from a QoS profile.
Table 8.3 DomainParticipant Operations
Working
with ...
Operation Description Reference

Chapter 8
8-14
Top ic s
create_topic Creates a Topic and a TopicListener.
Section 5.1.1create_topic _with_profile
Creates a Topic based on a QoS profile, and
a TopicListener.
delete_topic Deletes a Topic.
get_default_topic_qos
Copies the default TopicQos values into the
provided TopicQos structure.
Section 8.3.6.4
get_discovered_topic_data
Retrieves the BuiltinTopicData for a
discovered Topic.
Section 8.3.12
get_discovered_topics
Returns a list of all (non-ignored) discovered
Top ic s.
ignore_topic Rejects a remote topic. Section 14.4
lookup_topicdescription
Gets an existing locally-created
TopicDescription (Topic).
Section 8.3.7
set_default_topic_qos Sets the default TopicQos values.
Section 8.3.6.4
set_default_topic_qos_with
_profile
Sets the default TopicQos values using
values from a profile.
find_topic Finds an existing Topic, based on its name. Section 8.3.8
Flow-
Controllers
create_flowcontroller Creates a custom FlowController object.
Section 6.6.4
delete_flowcontroller Deletes a custom FlowController object.
get_default_flowcontroller_
property
Gets the default properties used when a
new FlowController is created.
Section 6.6.5
set_default_flowcontroller_
property
Sets the default properties used when a new
FlowController is created.
lookup_flowcontroller Finds a FlowController, based on its name. Section 6.6.8
Libraries
and Profiles
get_default_library Gets the default library.
Section 8.3.6.3
get_default_profile Gets the default profile.
get_default_profile_library
Gets the library that contains the default
profile.
set_default_profile Sets the default QoS profile.
set_default_library Sets the default library.
Table 8.3 DomainParticipant Operations
Working
with ...
Operation Description Reference
8.3 DomainParticipants
8-15
8. Domains
MultiTopics
create_multitopic
Creates a MultiTopic that can be used to sub-
scribe to multiple topics and combine/filter
the received data into a resulting type.
Currently not
supported.
delete_multitopic Deletes a MultiTopic.
Other
assert_liveliness
Manually asserts the liveliness of this
DomainParticipant.
Section 8.3.9
delete_contained_entities
Recursively deletes all the entities that were
created using the "create" operations on the
DomainParticipant and its children.
Section 8.3.3
contains_entity
Confirms if an entity belongs to the Domain-
Participant or not.
Section 8.3.13.1
get_current_time
Gets the current time used by
RTI Data Dis-
tribution Service
.
Section 8.3.13.2
get_status_changes
Gets a list of statuses that have changed
since the last time the application read the
status or the Listeners were called.
Section 4.1.4
Table 8.3 DomainParticipant Operations
Working
with ...
Operation Description Reference

Chapter 8
8-16
8.3.1 Creating a DomainParticipant
Typically, you will only need to create one DomainParticipant per domain per applica-
tion. (Although unusual, you can create multiple DomainParticipants for the same
domain in an application.)
To create a DomainParticipant, use the DomainParticipantFactory’s create_participant() or
create_participant_with_profile() operation:
DDSDomainParticipant * create_participant(
DDS_DomainId_t domainId,
const DDS_DomainParticipantQos &qos,
DDSDomainParticipantListener *listener,
DDS_StatusMask mask)
DDSDomainParticipant * create_participant_with_profile (
DDS_DomainId_t domainId,
const char * library_name,
const char *profile_name,
DDSDomainParticipantListener *listener,
DDS_StatusMask mask)
A QoS profile is way to use QoS settings from an XML file or string. With this approach,
you can change QoS settings without recompiling the application. For details, see
Chapter 15: Configuring QoS with XML.
domainId The domain ID uniquely identifies the domain that the DomainParticipant is
in. It controls with which other DomainParticipants it will communicate. See
Section 8.3.4 for more information on domain IDs.
qos If you want the default QoS settings (described in the online documentation), use
DDS_PARTICIPANT_QOS_DEFAULT for this parameter (see Figure 8.4 on
page 8-17). If you want to customize any of the QosPolicies, supply a DomainPar-
ticipantQos structure that is described in Section 8.3.6.
Note: If you use DDS_PARTICIPANT_QOS_DEFAULT, it is not safe to create
the DomainParticipant while another thread may simultaneously be calling the
DomainParticipantFactory’s set_default_participant_qos() operation.
listener Listeners are callback routines. RTI Data Distribution Service uses them to notify
your application of specific events (status changes) that may occur. The listener
parameter may be set to NULL if you do not want to install a Listener. The
DomainParticipant’s Listener is a catchall for all of the events of all of its Entities. If
an event is not handled by an Entity’s Listener, then the DomainParticipantListener
may be called in response to the event. For more information, see Setting Up
DomainParticipantListeners (Section 8.3.5).

8.3 DomainParticipants
8-17
8. Domains
mask This bit mask indicates which status changes will cause the Listener to be
invoked. The bits set in the mask must have corresponding callbacks imple-
mented in the Listener. If you use NULL for the Listener, use
DDS_STATUS_MASK_NONE for this parameter. If the Listener implements all
callbacks, use DDS_STATUS_MASK_ALL. For information on statuses, see Lis-
teners (Section 4.4).
library_name A QoS Library is a named set of QoS profiles. See QoS Libraries (Section
15.9).
profile_name A QoS profile groups a set of related QoS, usually one per entity. See QoS
Profiles (Section 15.8).
After you create a DomainParticipant, the next step is to register the data types that will
be used by the application, see Using rtiddsgen (Section 3.6). Then you will need to cre-
ate the Topic s that the application will publish and/or subscribe, see Creating Topics
(Section 5.1.1). Finally, you will use the DomainParticipant to create Publishers and/or
Subscribers, see Creating Publishers (Section 6.2.2) and Creating Subscribers (Section
7.2.2).
Note: It is not safe to create one DomainParticipant while another thread may simultane-
ously be looking up (Section 8.2.4) or deleting (Section 8.3.2) the same DomainPartici-
pant.
For more examples, see Configuring QoS Settings when the DomainParticipant is Cre-
ated (Section 8.3.6.1).
Figure 8.4 Creating a DomainParticipant with Default QosPolicies
DDS_DomainId_t domain_id = 10;
// MyDomainParticipantListener is user defined and
// extends DDSDomainParticipantListener
MyDomainParticipantListener* participant_listener
= new MyDomainParticipantListener(); // or = NULL
// Create the participant
DDSDomainParticipant* participant =
factory->create_participant(domain_id,
DDS_PARTICIPANT_QOS_DEFAULT,
participant_listener,
DDS_STATUS_MASK_ALL);
if (participant == NULL) {
// ... error
};

Chapter 8
8-18
8.3.2 Deleting DomainParticipants
If the application is no longer interested in communicating in a certain domain, the
DomainParticipant can be deleted. A DomainParticipant can be deleted only after all the
entities that were created by the DomainParticipant have been deleted (see Deleting Con-
tained Entities (Section 8.3.3)).
To delete a DomainParticipant:
1. You must first delete all Entities (Publishers, Subscribers, ContentFilteredTopics, and
Topics) that were created with the DomainParticipant. Use the DomainParticipant’s
delete_<entity>() operations to delete them one at a time, or use the
delete_contained_entities() operation (Section 8.3.3) to delete them all at the
same time.
DDS_ReturnCode_t delete_publisher (DDSPublisher *p)
DDS_ReturnCode_t delete_subscriber (DDSSubscriber *s)
DDS_ReturnCode_t delete_contentfilteredtopic
(DDSContentFilteredTopic *a_contentfilteredtopic)
DDS_ReturnCode_t delete_topic (DDSTopic *topic)
2. Delete the DomainParticipant by using the DomainParticipantFactory’s
delete_participant() operation.
DDS_ReturnCode_t delete_participant
(DDSDomainParticipant *a_participant)
Note: A DomainParticipant cannot be deleted within its Listener callback, see Restricted
Operations in Listener Callbacks (Section 4.5.1).
After a DomainParticipant has been deleted, all of the participant’s internal RTI Data Dis-
tribution Service threads and allocated memory will have been deleted. You should
delete the DomainParticipantListener only after the DomainParticipant itself has been
deleted.
8.3.3 Deleting Contained Entities
The DomainParticipant’s delete_contained_entities() operation deletes all the Publishers
(including an implicitly created one, if it exists), Subscribers (including an implicitly cre-
ated one, if it exists), ContentFilteredTopics, and To pi cs that have been created by the
DomainParticipant.
DDS_ReturnCode_t delete_contained_entities( )

8.3 DomainParticipants
8-19
8. Domains
Prior to deleting each contained entity, this operation recursively calls the correspond-
ing delete_contained_entities() operation on each contained entity (if applicable). This
pattern is applied recursively. Therefore, delete_contained_entities() on the DomainPar-
ticipant will end up deleting all the entities recursively contained in the DomainPartici-
pant, that is also the DataWriter, DataReader, as well as the QueryCondition and
ReadCondition objects belonging to the contained DataReader.
If delete_contained_entities() returns successfully, the application may delete the
DomainParticipant knowing that it has no contained entities (see Deleting DomainPar-
ticipants (Section 8.3.2)).
8.3.4 Choosing a Domain ID and Creating Multiple Domains
A domain ID identifies the domain in which the DomainParticipant is communicating.
DomainParticipants with the same domain ID are on the same communication “chan-
nel”. DomainParticipants with different domain IDs are completely isolated from each
other.
The domain ID is a purely arbitrary value; you can use any integer 0 or higher, provided
it does not violate the guidelines for the DDS_RtpsWellKnownPorts_t structure
(
Section 8.5.9.3). Please see the online (HTML) documentation for the
DDS_RtpsWellKnownPorts_t structure and in particular,
DDS_INTEROPERABLE_RTPS_WELL_KNOWN_PORTS.
Most distributed systems can use a single domain for all of its applications. Thus a sin-
gle domain ID is sufficient. Some systems may need to logically partition nodes to pre-
vent them from communicating with each other directly, and thus will need to use
multiple domains. However, even in systems that only use a single domain, during the
testing and development phases, one may want to assign different users/testers differ-
ent domain IDs for running their applications so that their tests do not interfere with
each other.
To run multiple applications on the same node with the same domain ID, RTI Data Dis-
tribution Service uses a participant ID to distinguish between the different DomainPartici-
pants in the different applications. The participant ID is simply an integer value that
must be unique across all DomainParticipants created on the same node that use the same
domain ID. The participant_id is part of the WIRE_PROTOCOL QosPolicy (DDS Exten-
sion) (Section 8.5.9).
Although usually those DomainParticipants have been created in different applications,
the same application can also create multiple DomainParticipants with the same domain
ID. For optimal results, the participant_id should be assigned sequentially to the differ-
ent DomainParticipants, starting from the default value of 0.

Chapter 8
8-20
Once you have a DomainParticipant, you can retrieve its domain ID with the
get_domain_id() operation.
The domain ID and participant ID are mapped to port numbers that are used by trans-
ports for discovery traffic. For information on how port numbers are calculated, see
Ports Used for Discovery (Section 12.5). How DomainParticipants discover each other is
discussed in Chapter 12.
8.3.5 Setting Up DomainParticipantListeners
DomainParticipants may optionally have Listeners. Listeners are essentially callback rou-
tines and are how RTI Data Distribution Service will notify your application of specific
events (changes in status) for entities Topics, Publishers, Subscribers, DataWriters, and
DataReaders. Each Entity may have a Listener installed and enabled to process the events
for itself and all of the sub-Entities created from it. If an Entity does not have a Listener
installed or is not enabled to listen for a particular event, then RTI Data Distribution Ser-
vice will propagate the event to the Entity’s parent. If the parent Entity does not process
the event, RTI Data Distribution Service will continue to propagate the event up the object
hierarchy until either a Listener is invoked or the event is dropped.
The DomainParticipantListener is the last chance that an event can be processed for the
Entities descended from a DomainParticipant. The DomainParticipantListener is used only
if an event is not handled by any of the Entities contained by the participant.
A Listener is typically set up when the DomainParticipant is created (see Section 8.3.1).
You can also set one up after creation time by using the set_listener() operation, as illus-
trated in Figure 8.5 on page 8-21. The get_listener() operation can be used to retrieve the
current DomainParticipantListener.
If a Listener is set for a DomainParticipant, the Listener needs to exist as long as the
DomainParticipant exists. It is unsafe to destroy the Listener while it is attached to a par-
ticipant. However, you may remove the DomainParticipantListener from a DomainPartici-
pant by calling set_listener() with a NULL value. Once the Listener has been removed
from the participant, you may safely destroy it (see Types of Listeners (Section 4.4.1)).
Note: Due to a thread-safety issue, the destruction of a DomainParticipantListener from
an enabled DomainParticipant should be avoided—even if the DomainParticipantListener

8.3 DomainParticipants
8-21
8. Domains
Figure 8.5 Setting up DomainParticipantListener
// MyDomainParticipantListener only handles PUBLICATION_MATCHED and
// SUBSCRIPTION_MATCHED status for DomainParticipant Entities
class MyDomainParticipantListener :
public DDSDomainParticipantListener {
public:
virtual void on_publication_matched(DDSDataWriter *writer,
const DDS_PublicationMatchedStatus &status);
virtual void on_subscription_matched(DDSDataReader *reader,
const DDS_SubscriptionMatchedStatus &status);
};
void MyDomainParticipantListener::on_publication_matched(
DDSDataWriter *writer, const DDS_PublicationMatchedStatus &status)
{
const char *name = writer->get_topic()->get_name();
printf(“Number of matching DataReaders for Topic %s is %d\n”,
name, status.current_count);
};
void MyDomainParticipantListener::on_subscription_matched(
DDSDataReader *reader,
const DDS_SubscriptionMatchedStatus &status)
{
const char *name = reader->get_topicdescription()->get_name();
printf(“Number of matching DataWriters for Topic %s is %d\n”,
name, status.current_count);
};
// Set up participant listener
MyDomainParticipantListener* participant_listener =
new MyDomainParticipantListener();
if (participant_listener == NULL) {
// ... handle error
}
// Create the participant with a listener
DDSDomainParticipant* participant = factory->create_participant(
domain_id,
participant_qos,
participant_listener,
DDS_PUBLICATION_MATCHED_STATUS |
DDS_SUBSCRIPTION_MATCHED_STATUS
);
if (participant == NULL) {
// ... handle error
}

Chapter 8
8-22
has been removed from the DomainParticipant. (This limitation does not affect the Java
API.)
Note: It is possible for multiple internal RTI Data Distribution Service threads to call the
same method of a DomainParticipantListener simultaneously. You must write the meth-
ods of a DomainParticipantListener to be multithread safe and reentrant. The methods of
the Listener of other Entities do not have this constraint and are guaranteed to have sin-
gle threaded access.
See also:
❏ Setting Up TopicListeners (Section 5.1.5)
❏ Setting Up PublisherListeners (Section 6.2.5)
❏ Setting Up DataWriterListeners (Section 6.3.3)
❏ Setting Up SubscriberListeners (Section 7.2.5)
❏ Setting Up DataReaderListeners (Section 7.3.3)
8.3.6 Setting DomainParticipant QosPolicies
A DomainParticipant’s QosPolicies are used to configure discovery, database sizing,
threads, information sent to other DomainParticipants, and the behavior of the Domain-
Participant when acting as a factory for other Entities.
Note: set_qos() cannot always be used in a listener callback; see Restricted Operations
in Listener Callbacks (Section 4.5.1).

8.3 DomainParticipants
8-23
8. Domains
The DDS_DomainParticipantQos structure has the following format:
struct DDS_DomainParticipantQos {
DDS_UserDataQosPolicy user_data;
DDS_EntityFactoryQosPolicy entity_factory;
DDS_WireProtocolQosPolicy wire_protocol;
DDS_TransportBuiltinQosPolicy transport_builtin;
DDS_TransportUnicastQosPolicy default_unicast;
DDS_DiscoveryQosPolicy discovery;
DDS_DomainParticipantResourceLimitsQosPolicy resource_limits;
DDS_EventQosPolicy event;
DDS_ReceiverPoolQosPolicy receiver_pool;
DDS_DatabaseQosPolicy database;
DDS_DiscoveryConfigQosPolicy discovery_config;
DDS_PropertyQosPolicy property;
DDS_EntityNameQosPolicy participant_name;
DDS_TypeSupportQosPolicy type_support;
};
Table 8.4 summarizes the meaning of each policy (listed alphabetically). For information
on why you would want to change a particular QosPolicy, see the section referenced in
the table.
Table 8.4 DomainParticipant QosPolicies
QosPolicy Description
Database
Various settings and resource limits used by RTI Data Distribution Ser-
vice to control its internal database. See Section 8.5.1.
Discovery
Configures the mechanism used by RTI Data Distribution Service to
automatically discover and connect with new remote applications.
See Section 8.5.2.
DiscoveryConfig
Controls the amount of delay in discovering entities in the system
and the amount of discovery traffic in the network. See Section 8.5.3.
DomainParticipantResourceLimits
Various settings that configure how DomainParticipants allocate and
use physical memory for internal resources, including the maximum
sizes of various properties. See Section 8.5.4.
EntityFactory
Controls whether or not child entities are created in the enabled state.
See Section 6.4.2.
EntityName
Assigns a name to a DomainParticipant. See Section 8.5.5.
Event
Configures the DomainParticipant’s internal thread that handles timed
events. See Section 8.5.6.

Chapter 8
8-24
8.3.6.1 Configuring QoS Settings when the DomainParticipant is Created
As described in Creating a DomainParticipant (Section 8.3.1), there are different ways to
create a DomainParticipant, depending on how you want to specify its QoS (with or
without a QoS Profile).
❏ In Figure 8.4 on page 8-17, we saw an example of how to create a DomainPartici-
pant with default QosPolicies by using the special constant,
DDS_PARTICIPANT_QOS_DEFAULT, which indicates that the default QoS
values for a DomainParticipant should be used. The default DomainParticipant
QoS values are configured in the DomainParticipantFactory; you can change
them with set_default_participant_qos() or
set_default_participant_qos_with_profile() (see
Section 8.2.2). Then any Domain-
Participants created with the DomainParticipantFactory will use the new default
values. As described in Section 4.1.7, this is a general pattern that applies to the
construction of all DDS Entities.
Property
Stores name/value(string) pairs that can be used to configure certain
parameters of RTI Data Distribution Service that are not exposed
through formal QoS policies. It can also be used to store and propa-
gate application-specific name/value pairs, which can be retrieved
by user code during discovery. See Section 6.5.15.
ReceiverPool
Configures threads used by RTI Data Distribution Service to receive
and process data from transports (for example, UDP sockets). See
Section 8.5.7.
TransportBuiltin
Specifies which built-in transport plugins are used. See Section 8.5.8.
TransportUnicast
Specifies a subset of transports and port number that can be used by
an Entity to receive data. See Section 6.5.21.
TypeSupport
Used to attach application-specific value(s) to a DataWriter or
DataReader. These values are passed to the serialization or deserializa-
tion routine of the associated data type. See Section 6.5.22.
UserData
Along with Topic Data QosPolicy and Group Data QosPolicy, used to
attach a buffer of bytes to RTI Data Distribution Service's discovery
meta-data. See Section 6.5.23.
WireProtocol
Specifies IDs used by the RTPS wire protocol to create globally
unique identifiers. See Section 8.5.9.
Table 8.4 DomainParticipant QosPolicies
QosPolicy Description

8.3 DomainParticipants
8-25
8. Domains
❏ To create a DomainParticipant with non-default QoS without using a QoS Profile,
see the example code in Figure 8.6 on page 8-25. It uses the DomainParticipantFac-
tory’s get_default_participant_qos() method to initialize a DDS_ParticipantQos
structure. Then, the policies are modified from their default values before the
structure is used in the create_participant() method.
❏ You can also create a DomainParticipant and specify its QoS settings via a QoS
Profile. To do so, you will call create_participant_with_profile(), as seen in
Figure 8.7 on page 8-26.
❏ If you want to use a QoS profile, but then make some changes to the QoS before
creating the DomainParticipant, call get_participant_qos_from_profile() and
create_participant() as seen in Figure 8.8 on page 8-26.
For more information, see Creating a DomainParticipant (Section 8.3.1) and Chapter 15:
Configuring QoS with XML.
Figure 8.6 Creating a DomainParticipant with Modified QosPolicies (not from a profile)
DDS_DomainId_t domain_id = 10;
DDS_DomainParticipantQos participant_qos;
1
// initialize participant_qos with default values
factory->get_default_participant_qos(participant_qos);
// make QoS changes here
participant_qos.wire_protocol.participant_id = 2;
// Create the participant with modified qos
DDSDomainParticipant* participant =
factory->create_participant(domain_id,
participant_qos,
NULL,
DDS_STATUS_MASK_NONE);
if (participant == NULL) {
// ... error
}
1. Note: In C, you must initialize the QoS structures before they are used, see Section 4.2.2.

Chapter 8
8-26
DDS_DomainId_t domain_id = 10;
// MyDomainParticipantListener is user defined and
// extends DDSDomainParticipantListener
MyDomainParticipantListener* participant_listener
= new MyDomainParticipantListener(); // or = NULL
// Create the participant
DDSDomainParticipant* participant =
factory->create_participant_with_profile(domain_id,
“MyDomainLibrary”,
“MyDomainProfile”,
participant_listener,
DDS_STATUS_MASK_ALL);
if (participant == NULL) {
// ... error
};
Figure 8.7 Creating a DomainParticipant with a QoS Profile
DDS_DomainParticipantQos participant_qos;
// Get domain participant QoS from profile
retcode = factory->get_participant_qos_from_profile(
participant_qos1,
“DomainParticipantProfileLibrary”,
“DomainParticipantProfile”);
if (retcode != DDS_RETCODE_OK) {
// handle error
}
// Makes QoS changes here
participant_qos.entity_factory.autoenable_created_entities =
DDS_BOOLEAN_FALSE;
// create participant with modified QoS
DDSDomainParticipant* participant = factory->create_participant(
domain_id,
participant_qos,
NULL, DDS_STATUS_MASK_NONE);
if (participant == NULL) {
// handle error
}
Figure 8.8 Getting QoS Values from a Profile, Changing QoS Values, Creating a
DomainParticipant with Modified QoS Values

8.3 DomainParticipants
8-27
8. Domains
8.3.6.2 Changing QoS Settings After the DomainParticipant Has Been Created
There are two ways to change an existing DomainParticipant’s QoS after it is has been
created—again depending on whether or not you are using a QoS Profile.
❏ To change QoS programmatically (that is, without using a QoS Profile), use
get_qos() and set_qos(). See the example code in Figure 8.9. It retrieves the cur-
rent values by calling the DomainParticipant’s get_qos() operation. Then it modi-
fies the value and calls set_qos() to apply the new value. Note, however, that
some QosPolicies cannot be changed after the DomainParticipant has been
enabled—this restriction is noted in the descriptions of the individual QosPoli-
cies.
❏ You can also change a DomainParticipant’s (and all other Entities’) QoS by using a
QoS Profile and calling set_qos_with_profile(). For an example, see Figure 8.10
on page 8-28. For more information, see Chapter 15: Configuring QoS with XML.
DDS_DomainParticipantQos participant_qos;
1
// Get current QoS.
//participant points to an existing DDSDomainParticipant.
if (participant->get_qos(participant_qos) != DDS_RETCODE_OK) {
// handle error
}
// Make QoS changes
participant_qos.entity_factory.autoenable_created_entities =
DDS_BOOLEAN_FALSE;
// Set the new QoS
if (participant->set_qos(participant_qos) != DDS_RETCODE_OK ) {
// handle error
}
1. For the C API, you need to use DDS_ParticipantQos_INITIALIZER or DDS_ParticipantQos_initialize().
See Special QosPolicy Handling Considerations for C (Section 4.2.2)
Figure 8.9
Changing the QoS of an Existing Participant (without a QoS Profile)

Chapter 8
8-28
8.3.6.3 Getting and Setting the DomainParticipant’s Default QoS Profile and Library
You can get the default QoS profile for the DomainParticipant with the
get_default_profile() operation. You can also get the default library for the DomainPar-
ticipant, as well as the library that contains the DomainParticipant’s default profile (these
are not necessarily the same library); these operations are called get_default_library()
and get_default_library_profile(), respectively. These operations are for informational
purposes only (that is, you do not need to use them as a precursor to setting a library or
profile.) For more information, see Chapter 15: Configuring QoS with XML.
virtual const char * get_default_library ()
const char * get_default_profile ()
const char * get_default_profile_library ()
There are also operations for setting the DomainParticipant’s default library and profile:
DDS_ReturnCode_t set_default_library (const char * library_name)
DDS_ReturnCode_t set_default_profile (const char * library_name,
const char * profile_name)
If the default profile/library is not set, the DomainParticipant inherits the default from
the DomainParticipantFactory.
set_default_profile() specifies the profile that will be used as the default the next time a
default DomainParticipant profile is needed during a call to one of this DomainPartici-
pant’s operations. When calling a DomainParticipant operation that requires a
profile_name parameter, you can use NULL to refer to the default profile. (This same
information applies to setting a default library.)
set_default_profile() does not set the default QoS for entities created by the DomainPar-
ticipant; for this functionality, use the DomainParticipant’s
retcode = participant->set_qos_with_profile(
“ParticipantProfileLibrary”,”ParticipantProfile”);
if (retcode != DDS_RETCODE_OK) {
// handle error
}
Figure 8.10 Changing the QoS of an Existing Participant with a QoS Profile

8.3 DomainParticipants
8-29
8. Domains
set_default_<entity>_qos_with_profile() operation (you may pass in NULL after hav-
ing called set_default_profile(), see Section 8.3.6.4).
set_default_profile() does not set the default QoS for newly created DomainParticipants;
for this functionality, use the DomainParticipantFactory’s
set_default_participant_qos_with_profile(), see Section 8.2.2).
8.3.6.4 Getting and Setting Default QoS for Child Entities
The set_default_<entity>_qos() and set_default_<entity>_qos_with_profile() opera-
tions set the default QoS that will be used for newly created entities (where <entity>
may be publisher, subscriber, datawriter, datareader, or topic). The new QoS settings
will only be used if DDS_<entity>_QOS_DEFAULT is specified as the qos parameter
when create_<entity>() is called. For example, for a Publisher, you can use either:
DDS_ReturnCode_t set_default_publisher_qos (
const DDS_PublisherQos &qos)
DDS_ReturnCode_t set_default_publisher_qos_with_profile (
const char *library_name,
const char *profile_name)
The following operation gets the default QoS that will be used for creating Publishers if
DDS_PUBLISHER_QOS_DEFAULT is specified as the ‘qos’ parameter when
create_publisher() is called:
DDS_ReturnCode_t get_default_publisher_qos (DDS_PublisherQos & qos)
There are similar operations for Subscribers, DataWriters, DataReaders and To pi cs . These
operations, get_default_<entity>_qos()
, get the QoS settings that were specified on the
last successful call to set_default_<entity>_qos() or
set_default_<entity>_qos_with_profile(), or else, if the call was never made, the
default values listed in DDS_<entity>Qos. They may potentially allocate memory
depending on the sequences contained in some QoS policies.
Note: It is not safe to set default QoS values for an entity while another thread may be
simultaneously getting or setting them, or using the QOS_DEFAULT constant to create
the entity.
8.3.7 Looking up Topic Descriptions
The lookup_topicdescription() operation allows you to access a locally created
DDSTopicDescription based on the Top ic ’s name.
DDSTopicDescription* lookup_topicdescription
(const char *topic_name)
Chapter 8
8-30
DDSTopicDescription is the base class for Topi cs, MultiTopics
1
and ContentFilteredTopics.
You can narrow the DDSTopicDescription returned from lookup_topicdescription() to
a Topic or ContentFilteredTopic as appropriate.
Unlike find_topic() (see Section 8.3.7)
, which logically returns a new Topic that must be
independently deleted, this operation returns a reference to the original local object.
If no TopicDescription has been created yet with the given Topic name, this method will
return a NULL value.
The DomainParticipant does not have to be enabled when you call
lookup_topicdescription().
Note: It is not safe to create or delete a topic while another thread is calling
lookup_topicdescription() for that same topic.
8.3.8 Finding a Topic
The find_topic() operation finds an existing (or ready to exist) To pi c, based on its name.
This call can be used to block for a specified duration to wait for the Topic to be created.
DDSTopic* DDSDomainParticipant::find_topic (const char * topic_name,
const DDS_Duration_t & timeout)
If the requested Topic already exists, it is returned. Otherwise, find_topic() waits until
either another thread creates it, or else returns when the specified timeout occurs.
find_topic() is useful when multiple threads are concurrently creating and looking up
topics. In that case, one thread can call find_topic() and, if another thread has not yet
created the topic being looked up, it can wait for some period of time for it to do so. In
almost all other cases, it is more straightforward to call
lookup_topicdescription() (see
Section 8.3.7).
The DomainParticipant must be enabled when you call find_topic().
Note: Each DDSTopic obtained by find_topic() must also be deleted by calling the
DomainParticipant’s delete_topic() operation (see Section 5.1.2).
8.3.9 Getting the Implicit Publisher or Subscriber
The get_implicit_publisher() operation allows you to access the DomainParticipant’s
implicit Publisher. If one does not already exist, this operation creates an implicit
Pub-
lisher.
1. Multitopics are not supported.

8.3 DomainParticipants
8-31
8. Domains
There is a similar operation for implicit Subscribers:
DDSPublisher * get_implicit_publisher ()
DDSSubscriber * get_implicit_subscriber()
There can only be one implicit Publisher and one implicit Subscriber per DomainPartici-
pant. They are created with default QoS values (DDS_PUBLISHER_QOS_DEFAULT)
and no Listener. For more information, see Creating Publishers Explicitly vs. Implicitly
(Section 6.2.1). You can use an implicit Publisher or implicit Subscriber just like an explic-
itly created one.
An implicit Publisher/Subscriber is deleted automatically when
delete_contained_entities() is called. It can also be deleted by calling delete_publisher/
subscriber() with the implicit Publisher/Subscriber as a parameter.
When a DomainParticipant is deleted, if there are no attached DataReaders that belong to
the implicit Subscriber or no attached DataWriters that belong to the implicit Publisher,
any implicit Publisher/Subscriber will be deleted by the middleware implicitly.
Note: It is not safe to create an implicit Publisher/Subscriber while another thread may be
simultaneously calling set_default_[publisher/subscriber]_qos().
The following example code shows how to get the implicit Publisher/Subscriber. (For sim-
plicity, error handling is not shown.)
using namespace DDS;
...
Publisher * publisher = NULL;
Subscriber * subscriber = NULL;
PublisherQos publisher_qos;
SubscriberQos subscriber_qos;
...
publisher = participant->get_implicit_publisher();
/* Change implicit publisher QoS */
publisher->get_qos(publisher_qos);
publisher_qos.partition.name.maximum(3);
publisher_qos.partition.name.length(3);
publisher_qos.partition.name[0] = DDS_String_dup("partition_A");
publisher_qos.partition.name[1] = DDS_String_dup("partition_B");
publisher_qos.partition.name[2] = DDS_String_dup("partition_C");
publisher->set_qos(publisher_qos);

Chapter 8
8-32
/* Get implicit subscriber */
subscriber = participant->get_implicit_subscriber();
/* Change implicit subscriber QoS */
subscriber_qos.partition.name.maximum(3);
subscriber _qos.partition.name.length(3);
subscriber _qos.partition.name[0] = DDS_String_dup("partition_A");
subscriber _qos.partition.name[1] = DDS_String_dup("partition_B");
subscriber _qos.partition.name[2] = DDS_String_dup("partition_C");
subscriber->set_qos(subscriber_qos);
8.3.10 Asserting Liveliness
The assert_liveliness() operation manually asserts the liveliness of all the DataWriters
created by this DomainParticipant that has LIVELINESS QosPolicy (Section 6.5.11) kind
set to MANUAL_BY_PARTICIPANT. When assert_liveliness() is called, then for those
DataWriters who have their LIVELINESS set to MANUAL_BY_PARTICIPANT, RTI
Data Distribution Service will send a packet to all matched DataReaders that indicates that
the DataWriter is still alive.
However, the LIVELINESS contract of periodically sending liveliness packets to
DataReaders is also fulfilled when the write(), assert_liveliness(), unregister_instance()
and dispose() operations on a DataWriter itself is called. Those calls will also cause RTI
Data Distribution Service to send packets that indicate the liveliness of the DataWriter.
Therefore, it is necessary for the application to call assert_liveliness() on the DomainPar-
ticipant only if those operations on a DataWriter are not being invoked within the period
specified by the LIVELINESS QosPolicy (Section 6.5.11)
8.3.11 Learning about Discovered DomainParticipants
The get_discovered_participants() operation provides you with a list of DomainPartici-
pants that have been discovered in the domain (except any that you have said to ignore
via the ignore_participant() operation (
see Section 14.4)).
Once you have a list of discovered DomainParticipants, you can get more information
about them by calling the get_discovered_participant_data() operation. This operation
can only be used on DomainParticipants that are in the same domain and have not been
marked as ‘ignored.’ Otherwise, the operation will fail and return
DDS_RETCODE_PRECONDITION_NOT_MET. The returned information is of type
DDS_ParticipantBuiltinTopicData, described in Table 14.1 on page 14-3.

8.3 DomainParticipants
8-33
8. Domains
Note: The get_discovered_participant_data() operation does not retrieve the property
information from the builtin-topic data structure. This information is available through
the DataReaderListener’s on_data_available() callback (if a reader listener is installed
on the ParticipantBuiltinTopicDataDataReader).
8.3.12 Learning about Discovered Topics
The get_discovered_topics() operation provides you with a list of Topi cs that have been
discovered in the domain (except any that you have said to ignore via the ignore_topic()
operation (see Section 14.4)).
Once you have a list of discovered Top ic s, you can get more information about them by
calling the get_discovered_topic_data() operation. This operation can only be used on
Topi cs that have been created by a DomainParticipant in the same domain as the partici-
pant on which this operation is invoked and must not have been "ignored" by means of
the DomainParticipant ignore_topic() operation. Otherwise, the operation will fail and
return DDS_RETCODE_PRECONDITION_NOT_MET. The returned information is
of type DDS_TopicBuiltinTopicData, described in Table 14.4 on page 14-9.
8.3.13 Other DomainParticipant Operations
8.3.13.1 Verifying Entity Containment
If you have a handle to an Entity, and want to see if that Entity was created from your
DomainParticipant (or any of its Publishers or Subscribers), use the contains_entity() oper-
ation, which returns a boolean.
An Entity’s instance handle may be obtained from built-in topic data (see Chapter 14:
Built-In Topics), various statuses, or from the get_instance_handle() operation (see
Section 4.1.3).
8.3.13.2 Getting the Current Time
The get_current_time() operation returns the current time value from the same time-
source (clock) that RTI Data Distribution Service uses to timestamp the data published by
DataWriters (source_timestamp of the SampleInfo structure, see Section 7.4.5). The
time-sources used by RTI Data Distribution Service do not have to be synchronized nor
are they synchronized by RTI Data Distribution Service.
See also: Clock Selection (Section 8.6).

Chapter 8
8-34
8.3.13.3 Getting All Publishers and Subscribers
The get_publishers() and get_subscribers() operations will provide you with a list of
the DomainParticipant’s Publishers and Subscribers, respectively.
8.4 DomainParticipantFactory QosPolicies
This section describes QosPolicies that are strictly for the DomainParticipantFactory (not
the DomainParticipant). For a complete list of QosPolicies that apply to DomainPartici-
pantFactory, see Table 8.2 on page 8-7.
❏ PROFILE QosPolicy (DDS Extension) (Section 8.4.1)
❏ SYSTEM_RESOURCE_LIMITS QoS Policy (DDS Extension) (Section 8.4.2)
8.4.1 PROFILE QosPolicy (DDS Extension)
This QosPolicy determines the way that XML documents containing QoS profiles are
loaded.
All QoS values for DDS Entities can be configured with QoS profiles defined in XML
documents. XML documents can be passed to RTI Data Distribution Service in string
form, or more likely, through files found on a file system. This QoS configures how a
DomainParticipantFactory loads the QoS profiles defined in XML. QoS profiles may be
stored in this QoS as XML documents as a string. The location of XML files defining QoS
profiles may be configured via this QoS. There are also default locations where the
DomainParticipantFactory will look for files to load QoS profiles. You may disable any or
all of these default locations using the Profile QoS. For more information about QoS pro-
files and libraries, please see Chapter 15: Configuring QoS with XML.
This QosPolicy includes the members in Table 8.5 on page 8-35. For the defaults and
valid ranges, please refer to the online documentation.
8.4 DomainParticipantFactory QosPolicies
8-35
8. Domains
8.4.1.1 Example
DDSDomainParticipantFactory *factory =
DDSDomainParticipantFactory::get_instance();
DDS_DomainParticipantFactoryQos factoryQos;
DDS_ReturnCode_t retcode = factory->get_qos(factoryQos);
if (retcode != DDS_RETCODE_OK) {
// error
}
const char *url_profiles[2] = {
"file://usr/local/default_dds.xml",
"file://usr/local/alternative_default_dds.xml" };
factoryQos.profile.url_profile.from_array(url_profiles, 2);
factoryQos.profile.ignore_resource_profile = DDS_BOOLEAN_TRUE;
factory->set_qos(factoryQos);
Table 8.5 DDS_ProfileQosPolicy
Type Field Name Description
DDS_StringSeq
string_profile
Sequence of strings (empty by default) containing a
XML document to load.
The concatenation of the strings in this sequence
must be a valid XML document according to the
XML QoS profile schema.
url_profile
A sequence of URL groups (empty by default) con-
taining a set of XML documents to load.
See URL Groups (Section 15.10).
DDS_Boolean
ignore_user_profile
When TRUE, the QoS profiles contained in the file
USER_QOS_PROFILES.xml in the current work-
ing directory will be ignored.
ignore_environment_
profile
When TRUE, the value of the environment variable
NDDS_QOS_PROFILES will be ignored.
ignore_resource_
profile
When TRUE, the QoS profiles in the file
$NDDSHOME/resource/qos_profiles_4.5x
a
/xml/
QOS_PROFILES.xml will be ignored.
a. Replace the x in 4.5x with the version letter for the current RTI Data Distribution Service release.

Chapter 8
8-36
8.4.1.2 Properties
This QosPolicy can be changed at any time.
Since it is only for the DomainParticipantFactory, there are no compatibility restrictions
for how it is set on the publishing and subscribing sides.
8.4.1.3 Related QosPolicies
❏ None
8.4.1.4 Applicable Entities
❏ DomainParticipantFactory (Section 8.2)
8.4.1.5 System Resource Considerations
Once the QoS profiles are loaded, the DomainParticipantFactory will keep one copy of
each QoS in the QoS profiles in memory.
You can free the memory associated with the XML QoS profiles by calling the Domain-
ParticipantFactory’s unload_profiles() operation.
8.4.2 SYSTEM_RESOURCE_LIMITS QoS Policy (DDS Extension)
The SYSTEM_RESOURCE_LIMITS QosPolicy configures DomainParticipant-indepen-
dent resources used by RTI Data Distribution Service. Its main use is to change the maxi-
mum number of DomainParticipants that can be created within a single process (address
space).
It contains the single member as shown in Table 8.6. For the default and valid range,
please refer to the online documentation.
The only parameter that you can set, max_objects_per_thread, controls the size of
thread-specific storage that is allocated by RTI Data Distribution Service for every thread
that invokes an RTI Data Distribution Service API. This storage is used to cache objects
Table 8.6 DDS_SystemResourceLimitsQosPolicy
Type Field Name Description
DDS_Long max_objects_per_thread
Sizes the thread storage that is allocated on a per-
thread basis when the thread calls RTI Data Distribu-
tion Service APIs.

8.4 DomainParticipantFactory QosPolicies
8-37
8. Domains
that have to be created on a per-thread basis when a thread traverses different portions
of RTI Data Distribution Service internal code.
Thus instead of dynamically creating and destroying the objects as a thread enters and
leaves different parts of the code, RTI Data Distribution Service caches the objects by stor-
ing them in thread-specific storage. We assume that a thread will repeatedly call RTI
Data Distribution Service APIs so that the objects cached will be needed again and again.
The number of objects that will be stored in the cache depends the number of APIs (sec-
tions of RTI Data Distribution Service code) that a thread invokes. It also depends on the
number of different DomainParticipants with which the thread interacts. For a single
DomainParticipant, the maximum number of objects that could be stored is a constant–
independent of the number of Entities created in or by the participant. A safe number to
use is 200 objects per DomainParticipant.
A user thread that only interacts with a single DomainParticipant or the Entities thereof,
would never have more than 200 objects stored in its cache. However, if the same thread
invokes RTI Data Distribution Service APIs on other Entities of other DomainParticipants,
the maximum number of objects that may be stored will increase with the number of
participants involved.
The default setting of this resource should work for most user applications. However, if
your application uses more than 4 DomainParticipants, you may need to increase the
value of max_objects_per_thread.
8.4.2.1 Example
Say an application uses 10 DomainParticipants. If a single thread was used to create all 10
DomainParticipants, or a single thread is used to call write() on DataWriters belonging to
all 10 participants, it is possible to run out of thread-specific storage. Either the creation
of the participant or the write() will fail.
In that case, you will need to increase the value of max_objects_per_thread.
8.4.2.2 Properties
This QoS policy cannot be modified after the DomainParticipantFactory is used to create
the first DomainParticipant in an application.
This QoS can be set differently in different applications.
8.4.2.3 Related QoS Policies
There are no interactions with other QosPolicies.

Chapter 8
8-38
8.4.2.4 Applicable Entities
❏ DomainParticipantFactory (Section 8.2)
8.4.2.5 System Resource Considerations
Increasing the value of max_objects_per_thread will increase the amount of memory
allocated by RTI Data Distribution Service for every thread that access RTI Data Distribu-
tion Service code. This includes internal RTI Data Distribution Service threads as well as
user threads. Each object uses about 32 bytes of memory.
8.5 DomainParticipant QosPolicies
This section describes the QosPolicies that are strictly for DomainParticipants (and no
other types of Entities). For a complete list of QosPolicies that apply to DomainPartici-
pant, see Table 8.4 on page 8-23.
❏ DATABASE QosPolicy (DDS Extension) (Section 8.5.1)
❏ DISCOVERY QosPolicy (DDS Extension) (Section 8.5.2)
❏ DISCOVERY_CONFIG QosPolicy (DDS Extension) (Section 8.5.3)
❏ DOMAIN_PARTICIPANT_RESOURCE_LIMITS QosPolicy (DDS Extension)
(Section 8.5.4)
❏ ENTITYNAME QosPolicy (DDS Extension) (Section 8.5.5)
❏ EVENT QosPolicy (DDS Extension) (Section 8.5.6)
❏ RECEIVER_POOL QosPolicy (DDS Extension) (Section 8.5.7)
❏ TRANSPORT_BUILTIN QosPolicy (DDS Extension) (Section 8.5.8)
❏ WIRE_PROTOCOL QosPolicy (DDS Extension) (Section 8.5.9)
8.5.1 DATABASE QosPolicy (DDS Extension)
The Database QosPolicy configures how RTI Data Distribution Service manages its inter-
nal database, including how often it cleans up, the priority of the database thread, and
limits on resources that may be allocated by the database. RTI uses an internal in-mem-
ory database to store information about entities created locally as well as remote entities
found during the discovery process. This database uses a background thread to gar-

8.5 DomainParticipant QosPolicies
8-39
8. Domains
bage-collect records related to deleted entities. When the DomainParticipant that main-
tains this database is deleted, it shuts down this thread..
It includes the members in Table 8.7. For defaults and valid ranges, please refer to the
online documentation.
Table 8.7 DDS_DatabaseQosPolicy
Type Field Name Description
DDS_
ThreadSettings_t
thread.mask
thread.priority
thread.stack_size
Thread settings for the database thread used by RTI
Data Distribution Service to periodically remove deleted
records from the database. The values used for these
settings are OS-dependent.
Note: thread.cpu_list and thread.cpu_rotation are not
relevant in this QoS policy.
DDS_Duration_t shutdown_timeout
The maximum time that the DomainParticipant will wait
for the database thread to terminate when the partici-
pant is destroyed.
DDS_Duration_t cleanup_period
The period at which the database thread wakes up to
removed deleted records.
DDS_Duration_t
shutdown_cleanup
_period
The period at which the database thread wakes up to
removed deleted records when the DomainParticipant is
being destroyed.
DDS_Long initial_records
The number of records that is initially created for the
database. These records hold information for both local
and remote entities that are dynamically created or dis-
covered.
DDS_Long max_skiplist_level
This is a performance tuning parameter that optimizes
the time it takes to search the database for a record. A
‘Skip List’ is an algorithm for maintaining a list that is
faster to search than a Binary Tree.
This value should be set to log2(N), where N is the max-
imum number of elements that will be stored in a single
list. The list that stores the records for remote DataRead-
ers or the one for remote DataWriters tend to have the
most entries. So, the number of DataWriters or DataRead-
ers in a system across all DomainParticipants in a single
domain, which ever is greater, can be used to set this
parameter.

Chapter 8
8-40
You may be interested in modifying the shutdown_timeout and
shutdown_cleanup_period parameters to decrease the time it takes to delete a Domain-
Participant when your application is shutting down.
The DOMAIN_PARTICIPANT_RESOURCE_LIMITS QosPolicy (DDS Extension) (Sec-
tion 8.5.4) controls the memory allocation for elements stored in the database.
Real-time programmers will probably want to adjust the priorities of all of the threads
created by RTI Data Distribution Service relative to each other as well as relative to non-
RTI Data Distribution Service threads in their applications. Chapter 17: RTI Data Distribu-
tion Service Threading Model, EVENT QosPolicy (DDS Extension) (Section 8.5.6), and
RECEIVER_POOL QosPolicy (DDS Extension) (Section 8.5.7) discuss the other threads
that are created by RTI Data Distribution Service.
A record in the database can be deleted only when no threads are using it. RTI Data Dis-
tribution Service uses a thread that periodically checks the database if records that have
DDS_Long
max_weak_
references
This parameter sets the maximum number of entries in
the weak reference table. Weak references are used as a
technique for ensuring that unreferenced objects are
deleted.
The actual number of weak references is permitted to
grow from the value set by initial_weak_references to
this maximum.
To prevent RTI Data Distribution Service from allocating
memory for weak references after initialization, you
should set the initial and maximum weak references to
the same value.
However, it is difficult to calculate how many weak ref-
erences an application will use. To allow RTI Data Distri-
bution Service to grow the weak reference table as
needed, and thus dynamically allocate memory, you
should set the value of this field to
DDS_LENGTH_UNLIMITED, the default setting.
DDS_Long
initial_weak_
references
The initial number of entries in the weak reference table.
See max_weak_references.
RTI Data Distribution Service may decide to use a larger
initial value if initial_weak_references is set too small. If
you access this parameter after a DomainParticipant has
been created, you will see the actual value used.
Table 8.7 DDS_DatabaseQosPolicy
Type Field Name Description

8.5 DomainParticipant QosPolicies
8-41
8. Domains
been marked for deletion can be removed. This period is set by cleanup_period. When a
DomainParticipant is being destroyed, the thread will wake up faster at the
shutdown_cleanup_period as other threads delete and release records in preparation
for shutting down.
On Windows and VxWorks systems, the thread that is destroying the DomainParticipant
may block up to shutdown_timeout seconds while waiting for the database thread to
finish removing all records and terminating. On other operating systems, the thread
destroying the DomainParticipant will block as long as required for the database thread
to terminate.
The default values for those and the rest of the parameters in this QosPolicy should be
sufficient for most applications.
8.5.1.1 Example
The priority of the database thread should be set to the lowest priority among all
threads in a real-time system. Although, the database thread should not be permitted to
starve, the work that it performs is non-time-critical.
8.5.1.2 Properties
This QosPolicy cannot be modified after the DomainParticipant is created.
It can be set differently on the publishing and subscribing sides.
8.5.1.3 Related QosPolicies
❏ DOMAIN_PARTICIPANT_RESOURCE_LIMITS QosPolicy (DDS Extension)
(Section 8.5.4)
❏ EVENT QosPolicy (DDS Extension) (Section 8.5.6)
❏ RECEIVER_POOL QosPolicy (DDS Extension) (Section 8.5.7)
8.5.1.4 Applicable Entities
❏ DomainParticipants (Section 8.3)
8.5.1.5 System Resource Considerations
Setting the thread parameters correctly on a real-time operating system is usually criti-
cal to the proper overall functionality of the applications on that system. Larger values
for the thread.stack_size parameter will use up more memory.

Chapter 8
8-42
Smaller values for the cleanup_period and shutdown_cleanup_period will cause the
database thread to wake up more frequently using more CPU.
RTI Data Distribution Service is permitted to use up more memory for larger values of
max_skiplist_level and max_weak_references. Whether or not more memory is actu-
ally used depends on actual operating conditions.
8.5.2 DISCOVERY QosPolicy (DDS Extension)
The DISCOVERY QoS configures how DomainParticipants discover each other on the
network. It identifies where on the network this application can potentially discover
other applications with which to communicate. The middleware will periodically send
network packets to these locations, announcing itself to any remote applications that
may be present, and will listen for announcements from those applications. The discov-
ery process is described in detail in Chapter 12: Discovery.
This QosPolicy includes the members in Table 8.8. For defaults and valid ranges, please
refer to the online documentation.
8.5.2.1 Transports Used for Discovery
The enabled_transports field allows you to specify the set of installed and enabled
transports that can be used to discover other DomainParticipants. This field is a sequence
of strings where each string specifies an alias of a registered (and thus installed and
Table 8.8 DDS_DiscoveryQosPolicy
Type Field Name Description
DDS_StringSeq enabled_transports
Transports available for use by the discovery process.
See Section 8.5.2.1.
DDS_StringSeq initial_peers
Unicast locators (address/indices) of potential partic-
ipants with which this DomainParticipant will attempt
to establish communications. See Section 8.5.2.2.
DDS_StringSeq
multicast_receive_
addresses
List of multicast addresses on which Discovery-
related messages can be received by the DomainPar-
ticipant. See Section 8.5.2.4.
DDS_Long
metatraffic_transport
_priority
Transport priority to be used for sending Discovery
messages. See Section 8.5.2.5.
DDS_Boolean
accept_unknown_
peers
Whether to accept a participant discovered via uni-
cast that is not in the initial_peers list. See
Section 8.5.2.6.

8.5 DomainParticipant QosPolicies
8-43
8. Domains
enabled) transport. Please see the online documentation (Modules, RTI Data Distribu-
tion Service API Reference, Pluggable Transports) for more information.
8.5.2.2 Setting the ‘Initial Peers’ List
When a DomainParticipant is created, it needs to find other participants in the same
domain—this is known as the ‘discovery process’ which is discussed in Chapter 12: Dis-
covery. One way to do so is to use this QosPolicy to specify a list of potential partici-
pants. This is the role of the parameter initial_peers. The strings containing peer
descriptors are stored in the initial_peers string sequence. The format of a string dis-
cussed in Peer Descriptor Format (Section 12.2.1).
The peers stored in initial_peers are merely potential peers—there is no requirement that
the peer DomainParticipants are actually up and running or even will eventually exist.
The RTI Data Distribution Service discovery process will try to contact all potential peer
participants in the list periodically using unicast transports (as configured by the
DISCOVERY_CONFIG QosPolicy (DDS Extension) (Section 8.5.3)).
The initial_peers parameter can be modified in source code or it can be initialized from
an environment variable, NDDS_DISCOVERY_PEERS or from a text file, see Config-
uring the Peers List Used in Discovery (Section 12.2).
Note: IPv4 multicast addresses must have a prefix
When using the UDPv6 transport: if there are any IPv4 multicast addresses in the
peers list, make sure they have "udpv4://" in front of them.
For example:
setenv NDDS_DISCOVERY_PEERS
"udpv4://localhost,udpv4://239.255.0.1,shmem://"
or, to add IPv6 loopback and an IPv6 multicast address:
setenv NDDS_DISCOVERY_PEERS
"udpv4://localhost,udpv4://239.255.0.1,
shmem://,udpv6://::1,udpv6://ff05::239.255.0.1"
8.5.2.3 Adding to the Peers List
The DomainParticipant’s add_peer() operation adds a peer description to the internal
peer list that was initialized by the initial_peer field of the DISCOVERY QosPolicy.
DDS_ReturnCode_t DDSDomainParticipant::add_peer
(const char* peer_desc)

Chapter 8
8-44
The peer_desc string must be formatted as specified in Peer Descriptor Format (Section
12.2.1).
You can call this operation any time after the DomainParticipant has been created
(regardless of whether or not it is enabled). If the DomainParticipant is already enabled,
an attempt will be made to contact the new peer immediately.
Adding peers with this operation has no effect on the initial_peers list. After a Domain-
Participant has been created, the contents of the initial_peers field merely shows what
the internal peer list was initialized to be. Therefore, initial_peers may not reflect the
actual potential peer list used by a DomainParticipant. Furthermore, if you call get_qos(),
the returned list of peers will not include the added peer—get_qos() will only show you
what is set in the initial_peers list.
A peer added with add_peer() is not considered to be “unknown.” (That is, you may
have accept_unknown_peers (Section 8.5.2.6) set to FALSE and still use add_peer().)
Note: there is no complementary "remove peer" operation. You can, however, ignore
data from a participant by using the ignore_participant() operation described in
Section 14.4.
8.5.2.4 Configuring Multicast Receive Addresses
The multicast_receive_addresses field in the DISCOVERY QosPolicy is a sequence of
strings that specifies a set of multicast group addresses on which the DomainParticipant
will listen for discovery meta-traffic. Each string must have a valid multicast address in
either IPv4 dot notation or IPv6 presentation format. Please look at publicly available
documentation of the IPv4 and IPv6 standards for the definition and valid address
ranges for multicast.
The multicast_receive_addresses field can be initialized from multicast addresses that
appear in the NDDS_DISCOVERY_PEERS environment variable or text file, see Con-
figuring the Peers List Used in Discovery (Section 12.2). A multicast address found in
the environment variable or text file will be added both to the initial_peers and
multicast_receive_addresses fields. Note that the addresses in initial_peers are ones in
which the DomainParticipant will send discovery meta-traffic, and the ones in
multicast_receive_addresses are used for receiving discovery meta-traffic.
If NDDS_DISCOVERY_PEERS does not contain a multicast address, then
multicast_receive_addresses is cleared and the RTI discovery process will not listen for
discovery messages via multicast.
If NDDS_DISCOVERY_PEERS contains one or more multicast addresses, the
addresses are stored in multicast_receive_addresses, starting at element 0. They will be
stored in the order in which they appear in NDDS_DISCOVERY_PEERS.

8.5 DomainParticipant QosPolicies
8-45
8. Domains
Note: Currently, RTI Data Distribution Service will only listen for discovery traffic on the
first multicast address (element 0) in multicast_receive_addresses.
If you want to send discovery meta-traffic on a different set of multicast addresses than
you want to receive discovery meta-traffic, set initial_peers and
multicast_receive_addresses via the QosPolicy API.
8.5.2.5 Meta-Traffic Transport Priority
The metatraffic_transport_priority field is used to specify the transport priority to be
used for sending all discovery meta-traffic. See the TRANSPORT_PRIORITY QosPolicy
(Section 6.5.19) for details on how transport priorities may be used.
Currently, the builtin transports provided by RTI Data Distribution Service will ignore the
value set in this field.
8.5.2.6 Controlling Acceptance of Unknown Peers
The accept_unknown_peers field controls whether or not a DomainParticipant is
allowed to communicate with other DomainParticipants found via unicast transport that
are not in its peers list (which is the combination of the initial_peers list and any peers
added with the add_peer() operation described in Section 8.5.2.3).
Suppose Participant A is included in Participant B’s initial peers list, but Participant B is
not in Participant A’s list. When Participant B contacts Participant A by sending it a uni-
cast discovery packet, then Participant A has a choice:
❏ If accept_unknown_peers is DDS_BOOLEAN_TRUE, then Participant A will
reply to Participant B, and communications will be established.
❏ If accept_unknown_peers is DDS_BOOLEAN_FALSE, then Participant A will
ignore Participant B, and A and B will never talk.
Note that Participants do not exchange peer lists. So if Participant A knows about Par-
ticipant B, and Participant B knows about Participant C, Participant A will not discover
Participant C.
Note: If accept_unknown_peers is false and shared memory is disabled, applications on
the same node will not communicate if only ‘localhost’ is specified in the peer list. If
shared memory is disabled or ‘shmem://’ is not specified in the peer list, if you want to
communicate with other applications on the same node through the loopback interface,
you must put the actual node address or hostname in NDDS_DISCOVERY_PEERS.

Chapter 8
8-46
8.5.2.7 Example
You will always use this policy to set the participant_id when you want to run more
than one DomainParticipant in the same domain on the same host.
The easiest way to set the initial peers list is to use the NDDS_DISCOVERY_PEERS
environment variable. However, should you want asymmetric multicast addresses for
sending or receiving meta-traffic, you will need to use this QosPolicy directly.
A reason to use asymmetric multicast addresses is to take advantage of the efficiency
provided by using multicast, while at the same time preventing all participants from
discovering each other. For example, suppose you have a system in which you have a
single server node and a hundred client nodes. The client nodes do not publish or sub-
scribe to each other’s data and thus never need to know about each others existence.
If we did not use multicast, we would have to populate the server application’s peer list
with 100 peer descriptors for each of the client nodes. Each client application would
only need to have the server application in its peer list. The maintenance of the list is
unwieldy, especially if nodes are constantly reconfigured and addresses changed. In
addition, the server will send out discovery packets on a per client basis since the peer
list essentially holds 100 unicast addresses.
Instead, if we used a single multicast address in the NDDS_DISCOVERY_PEERS envi-
ronment variable, the server and all of the clients would discover each other. Certainly,
the list is easier to maintain, but the total amount of traffic has actually increased since
the clients are now exchanging packets with each other uselessly.
To keep the list maintainable, as well as to minimize discovery traffic, we can have the
server send out packets on a multicast address by modifying its initial_peer field. The cli-
ents would have their multicast_receive_addresses field set to the same address used
by the server. The initial_peers of the clients would only need the single unicast peer
descriptor of the server as before.
Now, the server can send a single packet that will be received by all of the clients, but
the clients will not discover each other because they never send out a multicast packet
themselves.
8.5.2.8 Properties
This QosPolicy cannot be modified after the DomainParticipant is created.
It can be set differently on the publishing and subscribing sides.
8.5.2.9 Related QosPolicies
❏ DISCOVERY_CONFIG QosPolicy (DDS Extension) (Section 8.5.3)
8.5 DomainParticipant QosPolicies
8-47
8. Domains
❏ TRANSPORT_BUILTIN QosPolicy (DDS Extension) (Section 8.5.8)
8.5.2.10 Applicable Entities
❏ DomainParticipants (Section 8.3)
8.5.2.11 System Resource Considerations
For every entry in the initial_peers list, RTI Data Distribution Service will periodically
send a discovery packet to see if that participant exists. If the list has many potential
participants that are never started, then CPU and network bandwidth may be wasted in
sending out packets that will never be received.
8.5.3 DISCOVERY_CONFIG QosPolicy (DDS Extension)
The DISCOVERY_CONFIG QosPolicy is used to tune the discovery process. It controls
how often to send discovery packets, how to determine when participants are alive or
dead, and resources used by the discovery mechanism.
The amount of network traffic required by the discovery process can vary widely based
on how your application has chosen to configure the middleware's network addressing
(e.g. unicast vs. multicast, multicast TTL, etc.), the size of the system, whether all appli-
cations are started at the same time or whether start times are staggered, and other fac-
tors. Your application can use this policy to make trade-offs between discovery
completion time and network bandwidth utilization. In addition, you can introduce
random back-off periods into the discovery process to decrease the probability of net-
work contention when many applications start simultaneously.
This QosPolicy includes the members in Table 8.9. Many of these members are
described in Chapter 12: Discovery. For defaults and valid ranges, please refer to the
online documentation
.
Table 8.9 DDS_DiscoveryConfigQosPolicy
Type Field Name Description
DDS_Duration_t
participant_liveliness_
lease_duration
The time period after which other
DomainParticipants can consider this one
dead if they do not receive a liveliness
packet from this DomainParticipant.
DDS_Duration_t
participant_liveliness_
assert_period
The period of time at which this Domain-
Participant will send out packets assert-
ing that it is alive.

Chapter 8
8-48
DDS_RemoteParticipant
PurgeKind
remote_participant_
purge_kind
Controls the DomainParticipant's behav-
ior for purging records of remote partici-
pants (and their contained entities) with
which discovery communication has
been lost. See Section 8.5.3.2.
DDS_Duration_t
max_liveliness_loss_
detection_period
The maximum amount of time between
when a remote entity stops maintaining
its liveliness and when the matched local
entity realizes that fact.
DDS_Long
initial_participant_
announcements
Sets how many initial liveliness
announcements the DomainParticipant
will send when it is first enabled, or after
discovering a new remote participant.
DDS_Duration_t
min_initial_participant_
announcement_period
Sets the minimum and maximum times
between liveliness announcements.
When a participant is first enabled, or
after discovering a new remote partici-
pant, RTI Data Distribution Service sends
initial_paricipant_annoucements num-
ber of discovery messages. These mes-
sages are sent with a sleep period
between them that is a random duration
between
min_initial_participant_announcement_
period
and
max_initial_participant_announcement_
period.
DDS_Duration_t
max_initial_participant_
announcement_period
DDS_BuiltinTopicReader
ResourceLimits_t
participant_reader_
resource_limits
Configures the resource for the built-in
DataReaders used to access discovery
information; see Section 8.5.3.1 and
Chapter 14: Built-In Topics.
publication_reader_
resource_limits
subscription_reader_
resource_limits
Table 8.9 DDS_DiscoveryConfigQosPolicy
Type Field Name Description

8.5 DomainParticipant QosPolicies
8-49
8. Domains
A DomainParticipant needs to send a message periodically to other DomainParticipants to
let the other participants know that it is still alive. These liveliness messages are sent to
all peers in the peer list that was initialized by the initial_peers parameter of the DIS-
COVERY QosPolicy (DDS Extension) (Section 8.5.2). Peer participants on the peer list
may or may not be alive themselves. The peer DomainParticipants that already know
about this DomainParticipant will use the participant_liveliness_lease_duration pro-
vided by this participant to declare the participant dead, if they have not received a live-
liness message for the specified time.
DDS_RtpsReliableWriter
Protocol_t
publication_writer Configures the RTPS reliable protocol
parameters for the writer side of a reli-
able connection. These DataWriters send
reliable discovery information to
DomainParticipants that were dynami-
cally discovered (see Chapter 12: Dis-
covery).
DDS_RtpsReliableWriterProtocol_t is
described in Table 6.29 on page 6-95.
subscription_writer
DDS_RtpsReliableReader
Protocol_t
publication_reader Configures the RTPS reliable protocol
parameters for the reader side of a
reliable connection. These DataReaders
receive discovery information reliably
from DomainParticipants that were
dynamically discovered (see Chapter 12:
Discovery).
DDS_RtpsReliableReaderProtocol_t is
described in Table 7.19 on page 7-76.
subscription_reader
DDS_DiscoveryConfig
BuiltinPluginKindMask
builtin_discovery_
plugins
The kind mask for selecting built-in dis-
covery plugins:
❏ Simple Discovery Protocol:
DDS_DISCOVERYCONFIG_
BUILTIN_SDP
❏ Enterprise Discovery Service:
DDS_DISCOVERYCONFIG_
BUILTIN_EDS
(Requires a separately purchased
product, RTI Enterprise Discovery
Service.)
Table 8.9 DDS_DiscoveryConfigQosPolicy
Type Field Name Description

Chapter 8
8-50
The participant_liveliness_assert_period is the periodic rate at which this DomainPar-
ticipant will be sending liveliness messages. Since these liveliness messages are not sent
reliably and can get dropped by the transport, it is important to set
participant_liveliness_assert_period < participant_liveliness_lease_duration/N
where N is the number of liveliness messages that other DomainParticipants must miss
before they decide that this DomainParticipant is dead.
DomainParticipants that receive a liveliness message from a participant that they did not
know about previously will have “discovered” the participant. When one DomainPartic-
ipant discovers another, the discoverer will immediately send its own liveliness packets
back. initial_participant_announcements controls how many of these initial liveliness
messages are sent, and max_initial_participant_announcement_period controls the
time period in between each message.
After the initial set of liveliness messages are sent, the DomainParticipant will return to
sending liveliness packets to all peers in its peer list at the rate governed by
participant_liveliness_assert_period.
For more information on the discovery process, see Chapter 12: Discovery.
8.5.3.1 Resource Limits for Builtin-Topic DataReaders
The DDS_BuiltinTopicReaderResourceLimits_t structure is shown in Table 8.10. This
structure contains several fields that are used to configure the resource limits of the buil-
tin-topic DataReaders used to receive discovery meta-traffic from other DomainPartici-
pants.
There are builtin-topics for exchanging data about DomainParticipants, for publications
(Publisher/DataWriter combination) and for subscriptions (Subscriber/DataReader combi-
nation). The DataReaders for the publication and subscription builtin-topics are reliable.
The DataReader for the participant builtin-topic is best effort.
You can set listeners on these DataReaders that are created automatically when a Domain-
Participant is created. With these listeners, your code can be notified when remote
DomainParticipants, Publishers/DataWriters, and Subscriber/DataReaders are discovered.
You can always check the receive queues of those DataReaders for the same information
about discovered entities at any time. Please see Chapter 14: Built-In Topics for more
details.
The initial_samples and max_samples, and related initial_infos and max_infos, fields
size the amount of declaration messages can be stored in each builtin-topic DataReader.

8.5 DomainParticipant QosPolicies
8-51
8. Domains
8.5.3.2 Controlling Purging of Remote Participants
When discovery communication with a remote participant has been lost, the local par-
ticipant must make a decision about whether to continue attempting to communicate
with that participant and its contained entities. The remote_participant_purge_kind is
used to select the desired behavior.
This does not pertain to the situation in which a remote participant has been gracefully
deleted and notification of that deletion have been successfully received by its peers. In
that case, the local participant will immediately stop attempting to communicate with
those entities and will remove the associated remote entity records from its internal
database.
The remote_participant_purge_kind can be set to the following values:
❏ DDS_LIVELINESS_BASED_REMOTE_PARTICIPANT_PURGE
This value causes RTI Data Distribution Service to keep the state of a remote par-
ticipant and its contained entities for as long as the participant maintains its live-
liness contract (as specified by its participant_liveliness_lease_duration in the
DISCOVERY_CONFIG QosPolicy (DDS Extension) (Section 8.5.3)).
Table 8.10 DDS_BuiltinTopicReaderResourceLimits_t
Type Field Name Description
DDS_Long
initial_samples
Initial number of meta-traffic data samples that can
be stored by a builtin-topic DataReader.
max_samples
Maximum number of meta-traffic data samples that
can be stored by a builtin-topic DataReader.
initial_infos
Initial number of DDS_SampleInfo structures allo-
cated for the builtin-topic DataReader.
max_infos
Maximum number of DDS_SampleInfo structures
that can be allocated for the built-in topic
DataReader.
max_infos must be >= max_samples
initial_outstanding_reads
Initial number of times in which memory can be
concurrently loaned via read/take calls on the
builtin-topic DataReader without being returned
with return_loan().
max_outstanding_reads
Maximum number of times in which memory can
be concurrently loaned via read/take calls on the
builtin-topic DataReader without being returned
with return_loan().

Chapter 8
8-52
A participant will maintain its own liveliness to any remote participant via inter-
participant liveliness traffic (see LIVELINESS QosPolicy (Section 6.5.11)).
The default Simple Discovery Protocol described in Chapter 12: Discovery auto-
matically maintains this liveliness, whereas other discovery mechanisms may or
may not.
❏ DDS_NO_REMOTE_PARTICIPANT_PURGE
With this value, RTI Data Distribution Service will never purge the records of a
remote participant with which discovery communication has been lost.
• If the remote participant is later rediscovered, the records that remain in
the database will be re-used.
• If the remote participant is not rediscovered, the records will continue to
take up space in the database for as long as the local participant remains in
existence.
In most cases, you will not need to change this value from its default,
DDS_LIVELINESS_BASED_REMOTE_PARTICIPANT_PURGE.
However, DDS_NO_REMOTE_PARTICIPANT_PURGE may be a good choice if the fol-
lowing conditions apply:
❏ Discovery communication with a remote participant may be lost while data com-
munication remains intact. This will not be the typical case if discovery takes
place over the Simple Discovery Protocol, but may occur if you are using RTI
Enterprise Discovery Service.
1
❏ Extensive and prolonged lack of discovery communication between participants
is not expected to be common, either because loss of the participant will be rare,
or because participants may be lost sporadically but will typically return again.
❏ Maintaining inter-participant liveliness is problematic, perhaps because a partic-
ipant has no writers with the appropriate LIVELINESS QosPolicy (Section 6.5.11)
kind.
8.5.3.3 Controlling the Reliable Protocol Used by Builtin-Topic DataWriters/DataReaders
The connection between the DataWriters and DataReaders for the publication and sub-
scription builtin-topics are reliable. The publication_writer, subscription_writer,
publication_reader, and subscription_reader parameters of the DISCOVERY_CONFIG
QosPolicy (DDS Extension) (Section 8.5.3) configure the reliable messaging protocol
1. RTI Enterprise Discovery Service is an optional package that provides participant-matching services for
RTI Data Distribution Service applications.

8.5 DomainParticipant QosPolicies
8-53
8. Domains
used by RTI Data Distribution Service for those topics. RTI Data Distribution Service’s reli-
able messaging protocol is discussed in Chapter 10: Reliable Communications.
See also:
❏ DATA_WRITER_PROTOCOL QosPolicy (DDS Extension) (Section 6.5.2)
❏ DATA_READER_PROTOCOL QosPolicy (DDS Extension) (Section 7.6.1).
8.5.3.4 Example
Users will be most interested in setting the participant_liveliness_lease_duration and
participant_liveliness_assert_period values for their DomainParticipants. Basically, the
lease duration governs how fast an application realizes another application dies unex-
pectedly. The shorter the periods, the quicker a DomainParticipant can determine that a
remote participant is dead and act accordingly by declaring all of the remote DataWrit-
ers and DataReaders of that participant dead as well.
However, you should realize that the shorter the period the more liveliness packets will
sent by the DomainParticipant. How many packets is also determined by the number of
peers in the peer list of the participant–whether or not the peers on the list are actually
alive.
8.5.3.5 Properties
This QosPolicy cannot be modified after the DomainParticipant is created.
It can be set differently on the publishing and subscribing sides.
8.5.3.6 Related QosPolicies
❏ DISCOVERY QosPolicy (DDS Extension) (Section 8.5.2)
❏ DOMAIN_PARTICIPANT_RESOURCE_LIMITS QosPolicy (DDS Extension)
(Section 8.5.4)
❏ WIRE_PROTOCOL QosPolicy (DDS Extension) (Section 8.5.9)
❏ DATA_WRITER_PROTOCOL QosPolicy (DDS Extension) (Section 6.5.2)
❏ DATA_READER_PROTOCOL QosPolicy (DDS Extension) (Section 7.6.1)
❏ DATA_READER_RESOURCE_LIMITS QosPolicy (DDS Extension) (Section
7.6.2)
8.5.3.7 Applicable Entities
❏ DomainParticipants (Section 8.3)

Chapter 8
8-54
8.5.3.8 System Resource Considerations
Setting smaller values for time periods can increase the CPU and network bandwidth
usage. Setting larger values for maximum limits can increase the maximum memory
that RTI Data Distribution Service may allocate for a DomainParticipant while increasing
the initial values will increase the initial memory allocated for a DomainParticipant.
8.5.4 DOMAIN_PARTICIPANT_RESOURCE_LIMITS QosPolicy (DDS Extension)
The DOMAIN_PARTICIPANT_RESOURCE_LIMITS QosPolicy includes various set-
tings that configure how DomainParticipants allocate and use physical memory for inter-
nal resources, including the maximum sizes of various properties.
This QosPolicy sets maximum size limits on variable-length parameters used by the
participant and its contained DDS Entities. It also controls the initial and maximum
sizes of data structures used by the participant to store information about locally-cre-
ated and remotely-discovered entities (such as DataWriters/DataReaders), as well as
parameters used by the internal database to size the hash tables used by the data struc-
tures.
By default, a DomainParticipant is allowed to dynamically allocate memory as needed as
users create local DDS Entities such as DataWriters and DataReaders or as the participant
discovers new applications to store their information. By setting fixed values for the
maximum parameters in this QosPolicy, you can bound the memory that can be allo-
cated by a DomainParticipant. In addition, by setting the initial values to the maximum
values, you can prevent DomainParticipants from allocating memory after the initializa-
tion period.
The maximum sizes of several variable-length parameters—such as the number of par-
titions that can be stored in the PARTITION QosPolicy (Section 6.4.5), the maximum
length of data store in the USER_DATA QosPolicy (Section 6.5.23) and GROUP_DATA
QosPolicy (Section 6.4.4), and many others—can be changed from their defaults using
this QoS. However, it is important that all
DomainParticipants that need to communicate
with each other use the same set of maximum values. Otherwise, when these parame-
ters are propagated from one DomainParticipant to another, a DomainParticipant with a
smaller maximum length may reject the parameter resulting in an error.
This QosPolicy includes the members in Table 8.11. For defaults and valid ranges, please
refer to the online documentation.

8.5 DomainParticipant QosPolicies
8-55
8. Domains
Table 8.11 DDS_DomainParticipantResourceLimitsQosPolicy
Type Field Name Description
DDS_Allocation-
Settings_t
(see description
column)
local_writer_allocation
Each allocation structure configures how many objects
of each type, <object>_allocation, will be allocated by
the DomainParticipant.
See Configuring Resource Limits for Asynchronous
DataWriters (Section 8.5.4.1).
DDS_AllocationSettings_t
{
DDS_Long initial_count;
DDS_Long max_count;
DDS_Long
incremental_count;
};
local_reader_allocation
local_publisher_allocation
local_subscriber_allocation
local_topic_allocation
remote_writer_allocation
remote_reader_allocation
remote_participant_allocation
matching_writer_reader_pair_allocation
matching_reader_writer_pair_allocation
ignored_entity_allocation
content_filtered_topic_allocation
content_filter_allocation
read_condition_allocation
query_condition_allocation
outstanding_asynchronous_sample_
allocation
flow_controller_allocation
DDS_Long
local_writer_hash_buckets
Used to configure the hash tables used for database
searches. If these numbers are too large then memory is
wasted. If these number are too small, searching for an
object will be less efficient.
local_reader_hash_buckets
local_publisher_hash_buckets
local_subscriber_hash_buckets
local_topic_hash_buckets
remote_writer_hash_buckets
remote_reader_hash_buckets
remote_participant_hash_buckets
matching_writer_reader_pair_hash_buckets
matching_reader_writer_pair_hash_buckets
ignored_entity_hash_buckets
content_filtered_topic_hash_buckets
content_filter_hash_buckets
flow_controller_hash_buckets
Chapter 8
8-56
DDS_Long max_gather_destinations
Configures the maximum number of destinations that a
message can be addressed in a single network send
operation. Can improve efficiency if the underlying
transport support can send to multiple destinations.
DDS_Long
participant_user_data_max_length
Controls the maximum lengths of USER_DATA
QosPolicy (Section 6.5.23), TOPIC_DATA QosPolicy
(Section 5.2.1) and GROUP_DATA QosPolicy (Section
6.4.4) for different entities.
Must be configured to be the same values on all
DomainParticipants in the same domain.
topic_data_max_length
publisher_group_data_max_length
subscriber_group_data_max_length
writer_user_data_max_length
reader_user_data_max_length
DDS_Long max_partitions
Controls the maximum number of partitions that can be
assigned to a Publisher or Subscriber with the PARTI-
TION QosPolicy (Section 6.4.5).
Must be configured to be the same value on all Domain-
Participants in the same domain.
DDS_Long max_partition_cumulative_characters
Controls the maximum number of combined characters
among all partition names in the PARTITION QosPol-
icy (Section 6.4.5).
Must be configured to be the same value on all Domain-
Participants in the same domain.
DDS_Long type_code_max_serialized_length
Maximum size of serialized string for type code.
If your data type has an especially complex type code,
you may need to increase this value. See Using Gener-
ated Types without RTI Data Distribution Service
(Standalone) (Section 3.7).
DDS_Long contentfilter_property_max_length
Maximum length of all data related to ContentFiltered-
Topics (Section 5.4).
DDS_Long channel_seq_max_length
Maximum number of channels that can be specified in a
DataWriter’s MULTI_CHANNEL QosPolicy (DDS
Extension) (Section 6.5.12).
DDS_Long channel_filter_expression_max_length
Maximum length of a channel filter_expression in a
DataWriter’s MULTI_CHANNEL QosPolicy (DDS
Extension) (Section 6.5.12).
Table 8.11 DDS_DomainParticipantResourceLimitsQosPolicy
Type Field Name Description

8.5 DomainParticipant QosPolicies
8-57
8. Domains
Most of the parameters for this QosPolicy are described in the Description column of
the table. However, you may need to refer to the sections listed in the column to fully
understand the context in which the parameter is used.
An important parameter in this QosPolicy that is often changed by users is the
type_code_max_serialized_length. This parameter limits the size of the type code that
a DomainParticipant is able to store and propagate for user data types. Type codes can be
used by external applications to understand user data types without having the data
type predefined in compiled form. However, since type codes contain all of the informa-
tion of a data structure including the strings that define the names of the members of a
structure, complex data structures can result in type codes larger than the default maxi-
mum of 2048 bytes. Thus it is common for users to set this parameter to a larger value.
However, as with all parameters in this QosPolicy defining maximum sizes for variable-
length elements, all DomainParticipants should set the same value for
type_code_max_serialized_length.
The <object type>_hash_buckets configure the hash-table data structure that is used to
efficiently search the database. The optimal number of buckets depend on the actual
number of objects that will be stored in the hash table. So if you know how many
DataWriters will be created in a DomainParticipant, you may change the value of
local_writer_hash_buckets to balance memory usage against search efficiency. A
smaller value will use up less memory, but a larger value will make database lookups
for the object more efficient.
DDS_Long
participant_property_list_max_length
Maximum number of properties ((name, value) pairs)
that can be stored in the DomainParticipant’s PROP-
ERTY QosPolicy (DDS Extension) (Section 6.5.15).
participant_property_string_max_length
Maximum cumulative length (in bytes) of all the (name,
value) pairs in a DomainParticipant’s Property QosPol-
icy.
writer_property_list_max_length
Maximum number of properties ((name, value) pairs)
that can be stored in a DataWriter’s Property QosPolicy.
writer_property_string_max_length
Maximum cumulative length (in bytes) of all the (name,
value) pairs in a DataWriter’s Property QosPolicy.
reader_property_list_max_length
Maximum number of properties ((name, value) pairs)
that can be stored in a DataReader’s Property QosPolicy.
reader_property_string_max_length
Maximum cumulative length (in bytes) of all the (name,
value) pairs in a DataReader’s Property QosPolicy.
Table 8.11 DDS_DomainParticipantResourceLimitsQosPolicy
Type Field Name Description

Chapter 8
8-58
If you modify any of the <entity type>_data_max_length, max_partitions, or
max_partition_cummulative_characters parameters, then you must make sure that
they are modified to be the same value for all DomainParticipants in the same domain for
all applications. If they are different and an application sends data that is larger than
another application is configure to hold, then the two Entities, whether a matching
DataWriter/DataReader pair or even two DomainParticipants will fail to connect.
8.5.4.1 Configuring Resource Limits for Asynchronous DataWriters
When using an asynchronous Publisher, if a call to write() is blocked due to a resource
limit, the block will last until the timeout period expires, which will prevent others from
freeing the resource. To avoid this situation, make sure that the DomainParticipant’s
resource_limits.outstanding_asynchronous_sample_allocation is always greater than
the sum of all asynchronous DataWriters’ resource_limits.max_samples (see
RESOURCE_LIMITS QosPolicy (Section 6.5.18)).
8.5.4.2 Configuring Memory Allocation
The <object type>_allocation configure the number of <object type>’s that can be
stored in the internal RTI Data Distribution Service database. For example,
local_writer_allocation configures how many local DataWriters can be created for the
DomainParticipant.
The DDS_AllocationSettings_t structure sets the initial and maximum number of each
object type that can be stored. Memory is allocated for the storage of the objects, thus
initial_count will determine how much memory is initially allocated, and max_count
will determine the maximum amount of memory that RTI Data Distribution Service is
allowed to allocate. The incremental_count is used to allocate more memory in chunks
when the number of objects created exceed the initial_count.
You should modify these parameters only if you want to decrease the initial memory
used by RTI Data Distribution Service when a DomainParticipant is created or increase the
maximum number of local and remote Entities that can be stored in a DomainParticipant.
How RTI Data Distribution Service is allowed to allocate memory for a DomainParticipant
after initialization depends on how you set these parameters.

8.5 DomainParticipant QosPolicies
8-59
8. Domains
1. Static memory allocation
No memory is allocated by RTI Data Distribution Service after creation. Set
initial_count = max_count. The incremental_count should be set to 0.
Advantage: All memory allocation is done when creating the DomainParticipant;
no dynamic allocation during run-time. You know immediately if you have
enough memory to run in that configuration.
Disadvantage: Requires a fairly static system and/or good estimates on the num-
ber of Entities in the distributed system. RTI Data Distribution Service will fail to
execute properly once the number of Entities exceed the configure bounds.
2. Dynamic, bounded allocation
Set initial_count to configure the initial amount of memory to be allocated. Set
max_count to the maximum allowable upper bound (see the online documenta-
tion).
Advantage: Initial memory usage may be lower and memory is allocated as
needed and only if needed.
Disadvantage: RTI Data Distribution Service may allocate memory dynamically
which may have an impact on performance.
If you allow RTI Data Distribution Service to allocate memory dynamically, you
can either:
• Use fixed-size increments (set incremental_count to the desired fixed
size).
Advantage: well known amount of memory allocated each time.
Disadvantage: may require more frequent allocations.
• Double the amount of extra memory allocated each time memory is
needed (set incremental_count to -1).
Advantage: requires fewer allocations.
Disadvantage: may allocate considerably more memory than is really
needed.
8.5.4.3 Example
For most applications, the default values for this QosPolicy may be sufficient. However,
if an application uses the PARTITION, USER_DATA, TOPIC_DATA, or GROUP_DATA
QosPolicies, the default maximum sizes of the data associated with those policies may
need to be adjusted as required by the application. As noted previously, you must make

Chapter 8
8-60
sure that all DomainParticipants in the same domain use the same sets of values or else it
is possible that RTI Data Distribution Service will not successfully connect two Entities.
8.5.4.4 Properties
This QosPolicy cannot be modified after the DomainParticipant is created.
It can be set differently on the publishing and subscribing sides.
8.5.4.5 Related QosPolicies
❏ DATABASE QosPolicy (DDS Extension) (Section 8.5.1)
❏ DISCOVERY_CONFIG QosPolicy (DDS Extension) (Section 8.5.3)
❏ MULTI_CHANNEL QosPolicy (DDS Extension) (Section 6.5.12)
❏ USER_DATA QosPolicy (Section 6.5.23)
❏ TOPIC_DATA QosPolicy (Section 5.2.1)
❏ GROUP_DATA QosPolicy (Section 6.4.4)
❏ PARTITION QosPolicy (Section 6.4.5)
❏ PROPERTY QosPolicy (DDS Extension) (Section 6.5.15)
8.5.4.6 Applicable Entities
❏ DomainParticipants (Section 8.3)
8.5.4.7 System Resource Considerations
Memory and CPU usage are directly affected by the values set for parameters of this
QosPolicy. See the detailed descriptions above for specifics.
8.5.5 ENTITYNAME QosPolicy (DDS Extension)
The ENTITYNAME QosPolicy is used to assign a string name to a DomainParticipant.
How this name is used is strictly application-dependent.
It is useful to attach names to DomainParticipants that are meaningful to the user. These
names are propagated during discovery so that applications can use these names to
identify, in a user-context, the DomainParticipants that it discovers. Also, RTI tools such
as RTI Analyzer will print these names for DomainParticipants that it finds so that users
can easily determine exactly which application they are browsing with RTI Analyzer.

8.5 DomainParticipant QosPolicies
8-61
8. Domains
This name will appear in the builtin topic for the DomainParticipant, as seen in Table 14.1
on page 14-3.
It contains the member listed in Table 8.13.
Prior to get_qos(), if the name field in this QosPolicy is not null, RTI Data Distribution
Service assumes the memory to be valid and big enough and may write to it. If that is not
desired, set name to NULL before calling get_qos() and RTI Data Distribution Service will
allocate adequate memory for name.
When the destructor of DomainParticipantQos (in C++, C++/CLI, and C#) or
DomainParticipantQos_finalize() (in C) is called, RTI Data Distribution Service will
attempt to free the memory used for name if it is not NULL. If this behavior is not
desired, set name to NULL before DomainParticipantQos destructor is called or before
DomainParticipantQos_finalize() is called.
8.5.5.1 Properties
This QosPolicy cannot be modified after the DomainParticipant is enabled.
8.5.5.2 Related QosPolicies
❏ None
8.5.5.3 Applicable Entities
❏ DomainParticipants (Section 8.3)
8.5.5.4 System Resource Considerations
If the value of name in this QosPolicy is not NULL, some memory will be consumed in
storing the information in the database, but should not significantly impact the use of
resource.
8.5.6 EVENT QosPolicy (DDS Extension)
The EVENT QosPolicy configures the internal RTI Data Distribution Service Event thread.
Table 8.12 DDS_EntityNameQoSPolicy
Type Field Name Description
char * name A null terminated string, up to 255 characters in length.

Chapter 8
8-62
This QoS allows the you to configure thread properties such as priority level and stack
size. You can also configure the maximum number of events that can be posted to the
event thread. It contains the members in Table 8.13. For defaults and valid ranges,
please refer to the online documentation.
The Event thread is used to wake up and execute timed events posted to the event
queue. In a DomainParticipant, different Entities may have constraints that have to be
checked at periodic intervals or at specific times. If the constraint is violated, a callback
function may need to be executed. Timed events include checking for timeouts and
deadlines, and executing internal and user timeout or exception handling routines/call-
backs. A combination of a time, constraint, and callback can be considered to be an
event. For more information, see Event Thread (Section 17.2).
For example, a DataReader may have a constraint that requires data to be received within
a period of time specified by the DEADLINE QosPolicy (Section 6.5.4). For that
DataReader, an event is stored by the Event thread so that it will wake up periodically to
check to see if data has arrived in time. If not, the Event thread will execute the
on_requested_deadline_missed() Listener callback of the DataReader (if it was installed
and enabled).
A reliable connection between a DataWriter and DataReader will also post events for
sending heartbeats used in the reliable protocol discussed in Chapter 10: Reliable Com-
munications.
This QoS configures the parameters associated with thread creation as well as the num-
ber of events that can be simultaneously stored by the Event thread.
Table 8.13 DDS_EventQoSPolicy
Type Field Name Description
DDS_Thread
Settings_t
thread.mask
thread.priority
thread.stack_size
Thread settings for the event thread used by RTI Data Distri-
bution Service to wake up for a timed event and possibly exe-
cute listener callbacks. The values used for these settings are
OS-dependent.
Note: thread.cpu_list and thread.cpu_rotation are not rele-
vant in this QoS policy.
DDS_Long initial_count Initial number of events that can be stored simultaneously.
DDS_Long max_count
Maximum number of events that can be stored simultane-
ously.

8.5 DomainParticipant QosPolicies
8-63
8. Domains
8.5.6.1 Example
In a real-time operating system, the priority of the Event thread should be set relative to
the priority of the events that it must handle. For example, you may want the Event
thread to have a high priority if the deadlines and callbacks that it handles are time or
safety critical. It may be critical that the data of a particular DataReader arrives on time
or if not, alternative action is taken with minimal latency.
If you create many Entities in a DomainParticipant with QosPolicies that will post events
that check deadlines, liveliness or send heartbeats, then you may need to increase the
maximum number of events that can be stored by the Event thread.
If your application is sending a lot of reliable data, you should increase the event thread
priority to be higher than the sending thread priority.
8.5.6.2 Properties
This QosPolicy cannot be modified after the DomainParticipant is created.
It can be set differently on the publishing and subscribing sides.
8.5.6.3 Related QosPolicies
❏ DATABASE QosPolicy (DDS Extension) (Section 8.5.1)
❏ RECEIVER_POOL QosPolicy (DDS Extension) (Section 8.5.7)
8.5.6.4 Applicable Entities
❏ DomainParticipants (Section 8.3)
8.5.6.5 System Resource Considerations
Increasing initial_count and max_count will increase initial and maximum memory
used for storing events.
Setting the thread parameters correctly on a real-time operating system is usually criti-
cal to the proper overall functionality of the applications on that system. Larger values
for the thread.stack_size parameter will use up more memory.
By default, a DomainParticipant will dynamically allocate memory as needed for events
posted to the event thread. However, by setting an maximum value or setting the initial
and maximum value to be the same, you can either bound the amount of memory allo-
cated for the event thread or prevent a DomainParticipant from dynamically allocating
memory for the event thread after initialization.

Chapter 8
8-64
8.5.7 RECEIVER_POOL QosPolicy (DDS Extension)
The RECEIVER_POOL QosPolicy configures the internal RTI Data Distribution Service
thread used to process the data received from a transport. The Receive thread is
described in detail in Section 17.3.
This QosPolicy contains the members in Table 8.14. For defaults and valid ranges, please
refer to the online documentation.
This QosPolicy sets the thread properties, like priority level and stack size, for the
threads used to receive and process data from transports. RTI Data Distribution Service
uses a separate receive thread per port per transport plugin. To force RTI Data Distribu-
tion Service to use a separate thread to process the data for a DataReader, you should set a
unique port for the TRANSPORT_UNICAST QosPolicy (DDS Extension) (Section
6.5.21) or TRANSPORT_MULTICAST QosPolicy (DDS Extension) (Section 7.6.5) for the
DataReader.
RTI Data Distribution Service creates at least one thread for every transport that is
installed and enabled for use by the DomainParticipant for receiving data. These threads
are used to process data samples received for the participant’s DataReaders, as well as
messages used by RTI Data Distribution Service itself in support of the application dis-
covery process discussed in Chapter 12.
The user application may configure RTI Data Distribution Service to create many more
threads for receiving data sent via multicast or even to dedicate a thread to process the
data samples of a single DataReader received on a particular transport. This QosPolicy is
used in the creation of all receive threads.
In many applications, users change the configuration of the builtin-transport
message_size_max property to increase the size of the largest data packet that can be
sent or received through the transport. Typically, users change the UDPv4 transport
plugin's message_size_max to 65536 (64 K), which is the largest packet that can be sent/
Table 8.14 DDS_ReceiverPoolQoSPolicy
Type Field Name Description
struct
DDS_ThreadSettings_t
thread.mask
thread.priority
thread.stack_size
hread.cpu_list
thread.cpu_rotation
Thread settings for the receive thread(s) used
by RTI Data Distribution Service to process
data received from a transport. The values
used for these settings are OS-dependent.
See also: Controlling CPU Core Affinity for
RTI Threads (Section 17.5).
DDS_Long buffer_size Size of the receive buffer in bytes.
DDS_Long buffer_alignment Byte-alignment of the receive buffer.

8.5 DomainParticipant QosPolicies
8-65
8. Domains
received via UDP. The ReceiverPool QosPolicy’s buffer_size should be set to at least the
same value as the maximum message_size_max parameter across all of the transports
being used that does not support zero-copy. (A transport that supports zero-copy will
not use the receive buffer. The only built-in transport that supports zero-copy is the
UDPv4 transport on VxWorks platforms.) If you are using the default configuration of
the built-in transports, you should not need to change this buffer size.
In addition, if your application only uses transports that support zero-copy, then you do
not need to modify the value of buffer_size, even if the message_size_max of the trans-
port is changed. Transports that support zero-copy do not copy their data into the buffer
provided by the receive thread. Instead, they provide the receive thread data in a buffer
allocated by the transport itself. The only built-in transport that supports zero-copy is
the UDPv4 transport on VxWorks platforms.
8.5.7.1 Example
When new data arrives on a transport, the receive thread may invoke the
on_data_available() of the Listener callback of a DataReader. Thus, you may want to
adjust the priority of the receive threads with respect to the other threads in the applica-
tion as appropriate for the proper operation of the system.
8.5.7.2 Properties
This QosPolicy cannot be modified after the DomainParticipant is created.
It can be set differently on the publishing and subscribing sides.
8.5.7.3 Related QosPolicies
❏ DATABASE QosPolicy (DDS Extension) (Section 8.5.1)
❏ EVENT QosPolicy (DDS Extension) (Section 8.5.6)
8.5.7.4 Applicable Entities
❏ DomainParticipants (Section 8.3)
8.5.7.5 System Resource Considerations
Increasing the buffer_size will increase memory used by a receive thread.
Setting the thread parameters correctly on a real-time operating system is usually criti-
cal to the proper overall functionality of the applications on that system. Larger values
for the thread.stack_size parameter will use up more memory.

Chapter 8
8-66
8.5.8 TRANSPORT_BUILTIN QosPolicy (DDS Extension)
RTI Data Distribution Service comes with three different transport plugins built into the
core libraries (for most supported target platforms). These are plugins for UDPv4,
shared memory, and UDPv6.
This QosPolicy allows you to control which built-in transport plugins are used by a
DomainParticipant. By default, only the UDPv4 and shared memory plugins are enabled
(for most platforms; on some platforms, the shared memory plugin is not available).
You can disable one or all of the builtin transports.
In some cases, users will disable the shared memory transport when they do not want
applications to use shared memory to communicate when running on the same node.
It contains the member in Table 8.15. For the default and valid values, please refer to the
online documentation.
Please see the online documentation (Modules, RTI Data Distribution Service API Ref-
erence, Pluggable Transports, Using Transport Plugins and Built-in Transport Plu-
gins) for more information.
See also: “Note:” on page 8-43.
8.5.8.1 Example
See Section 8.5.8.5 for an example of why you may want to use this QosPolicy.
In addition, customers may wish to install and use their own custom transport plugins
instead of any of the builtin transports. In that case, this QosPolicy may be used to dis-
able all builtin transports.
8.5.8.2 Properties
This QosPolicy cannot be modified after the DomainParticipant is created.
It can be set differently on the publishing and subscribing sides.
8.5.8.3 Related QosPolicies
❏ TRANSPORT_SELECTION QosPolicy (DDS Extension) (Section 6.5.20)
Table 8.15 DDS_TransportBuiltinQosPolicy
Type Field Name Description
DDS_TransportBuiltinKindMask mask
A mask with bits that indicate which
built-in transports will be installed.

8.5 DomainParticipant QosPolicies
8-67
8. Domains
❏ TRANSPORT_UNICAST QosPolicy (DDS Extension) (Section 6.5.21)
❏ TRANSPORT_MULTICAST QosPolicy (DDS Extension) (Section 7.6.5)
8.5.8.4 Applicable Entities
❏ DomainParticipants (Section 8.3)
8.5.8.5 System Resource Considerations
You can save memory and other system resources if you disable the built-in transports
that your application will not use. For example, if you only run a single application with
a single DomainParticipant on each machine in your network, then you can disable the
shared memory transport since your applications will never use it to send or receive
messages.
8.5.9 WIRE_PROTOCOL QosPolicy (DDS Extension)
The WIRE_PROTOCOL QosPolicy configures some global Real-Time Publish Subscribe
(RTPS) protocol-related properties for the DomainParticipant. The RTPS OMG-standard,
interoperability protocol is used by RTI Data Distribution Service to format and interpret
messages between DomainParticipants.
It includes the members in Table 8.16. For defaults and valid ranges, please refer to the
online documentation. (The default values contain the correctly initialized wire protocol
attributes. They should not be modified without an understanding of the underlying
Real-Time Publish Subscribe (RTPS) wire protocol.)
Table 8.16 DDS_WireProtocolQosPolicy
Type Field Name Description
DDS_Long participant_id
Unique identifier for participants
that belong to the same domain on
the same host. See Section 8.5.9.1.

Chapter 8
8-68
Note that DATA_WRITER_PROTOCOL QosPolicy (DDS Extension) (Section 6.5.2) and
DATA_READER_PROTOCOL QosPolicy (DDS Extension) (Section 7.6.1) configure
RTPS and reliability properties on a per DataWriter and DataReader basis.
8.5.9.1 Choosing Participant IDs
When you create a DomainParticipant, you must specify a domain ID, which identifies
the communication channel across the whole system. Each DomainParticipant in the
same domain on the same host also needs a unique integer, known as the
participant_id.
The participant_id uniquely identifies a DomainParticipant from other DomainPartici-
pants in the same domain on the same host. You can use the same participant_id value
for DomainParticipants in the same domain but running on different hosts.
The participant_id is also used to calculate the default unicast user-traffic and the uni-
cast meta-traffic port numbers, as described in Ports Used for Discovery (Section 12.5).
If you only have one DomainParticipant in the same domain on the same host, you will
not need to modify this value.
DDS_UnsignedLong
rtps_host_id
A machine/OS-specific host ID,
unique in the domain. See
Section 8.5.9.2.
rtps_app_id
A participant-specific ID, unique
within the scope of the rtps_host_id.
See Section 8.5.9.2.
rtps_instance_id
An instance-specific ID of the
DomainParticipant that, together with
the rtps_app_id, is unique within the
scope of the rtps_host_id. See
Section 8.5.9.2.
DDS_RtpsWellKnownPorts_t
rtps_well_known
_ports
Determines the well-known multi-
cast and unicast ports for discovery
and user traffic. See Section 8.5.9.3.
DDS_RtpsReservedPortKindMask
rtps_reserved_ports
_mask
Specifies which well-known multi-
cast and unicast ports to reserve
when enabling the DomainPartici-
pant.
DDS_WireProtocolQosPolicyAuto
Kind
rtps_auto_id_kind
Kind of auto mechanism used to cal-
culate the GUID prefix.
Table 8.16 DDS_WireProtocolQosPolicy
Type Field Name Description

8.5 DomainParticipant QosPolicies
8-69
8. Domains
You can either allow RTI Data Distribution Service to select a participant ID automatically
(by setting participant_id to -1), or choose a specific participant ID (by setting
participant_id to the desired value).
❏ Automatic Participant ID Selection
The default value of participant_id is -1, which means RTI Data Distribution Ser-
vice will select a participant ID for you.
RTI Data Distribution Service will pick the smallest participant ID, based on the
unicast ports available on the transports enabled for discovery, based on the uni-
cast and/or multicast ports available on the transports enabled for discovery
and/or user traffic.
The rtps_reserved_ports_mask field determines which ports to check when
picking the next available participant ID. The reserved ports are calculated based
on the formula specified in Inbound Ports for Meta-Traffic (Section 12.5.1) an
Inbound Ports for User Traffic (Section 12.5.2). By default, RTI Data Distribution
Service will reserve the meta-traffic unicast port, the meta-traffic multicast port,
and the user traffic unicast port.
RTI Data Distribution Service will attempt to resolve an automatic port ID either
when a DomainParticipant is enabled, or when a DataReader or a DataWriter is cre-
ated. Therefore, all the transports enabled for discovery must have been regis-
tered by this time. Otherwise, the discovery transports registered after resolving
the automatic port index may produce port conflicts when the DomainParticipant
is enabled.
To see what value RTI Data Distribution Service has selected, either:
• Change the verbosity level of the
NDDS_CONFIG_LOG_CATEGORY_API category to
NDDS_CONFIG_LOG_VERBOSITY_STATUS_LOCAL (see Controlling
Messages from RTI Data Distribution Service (Section 18.2)).
• Call get_qos() and look at the participant_id value in the
WIRE_PROTOCOL QosPolicy (DDS Extension) (Section 8.5.9) after the
DomainParticipant is enabled.
❏ Manual Participant ID Selection
If you do have multiple DomainParticipants on the same host, you should use
consecutively numbered participant indices start from 0. This will make it easier
to specify the discovery peers using the initial_peers parameter of this QosPol-
icy or the NDDS_DISCOVERY_PEERS environment variable. See Configuring
the Peers List Used in Discovery (Section 12.2) for more information.

Chapter 8
8-70
Do not use random participant indices since this would make DISCOVERY
incredibly difficult to configure. In addition, the participant_id has a maximum
value of 120 (and will be less for domain IDs other than 0) when using an IP-
based transport since the participant_id is used to create the port number (see
Ports Used for Discovery (Section 12.5)), and for IP, a port number cannot be
larger than 65536.
For details, see Ports Used for Discovery (Section 12.5).
8.5.9.2 Host, App, and Instance IDs
The rtps_host_id, rtps_app_id, and rtps_instance_id values are used by the RTPS pro-
tocol to allow RTI Data Distribution Service to distinguish messages received from differ-
ent DomainParticipants. Their combined values must be globally unique across all
existing DomainParticipants in the same domain. In addition, if an application dies unex-
pectedly and restarted, the IDs used by the new instance of DomainParticipants should
be different than the ones used by the previous instances. A change in these values
allows other DomainParticipants to know that they are communicating with a new
instance of an application, and not the previous instance.
If the value of rtps_host_id is set to DDS_RTPS_AUTO_ID, the IPv4 address of the
host is used as the host ID. If the host does not have an IPv4 address, then you should
set this value to uniquely distinguish the host from other nodes in the system.
If the value of rtps_app_id is set to DDS_RTPS_AUTO_ID, the process (or task) ID is
used. There can be at most 256 distinct participants in a shared address space (process)
with a unique rtps_app_id.
If the value of rtps_instance_id is set to DDS_RTPS_AUTO_ID, a counter is assigned
that is incremented per new participant. Thus, together with rtps_app_id, there can be
at most 2^64 distinct participants in a shared address space with a unique RTPS Glob-
ally Unique Identifier (GUID).
8.5.9.3 Ports Used for Discovery
The rtps_well_known_ports structure allows you to configure the ports that are used
for discovery of inbound meta-traffic (discovery data internal to RTI Data Distribution
Service) and user traffic (from your application).
It includes the members in Table 8.17. For defaults and valid ranges, please refer to the
online documentation.

8.5 DomainParticipant QosPolicies
8-71
8. Domains
8.5.9.4 Controlling How the GUID is Set (rtps_auto_id_kind)
In order for the discovery process to work correctly, each DomainParticipant must have a
unique identifier. This QoS policy specifies how that identifier should be generated.
RTPS defines a 96-bit prefix to this identifier; each DomainParticipant must have a
unique value of this prefix relative to all other participants in its domain. In order to
make it easier to control how this 96-bit value is generated, RTI Data Distribution Service
divides it into three integers: a host ID, the value of which is based on the identity of the
machine on which the participant is executing, an application ID (whose value is based
on the process or task in which the participant is contained), and an instance ID which
identifies the participant itself.
This QoS policy provides you with a choice of algorithms for generating these values
automatically. In case none of these algorithms suit your needs, you may also choose to
specify some or all of them yourself.
The following three fields compose the GUID prefix and by default are set to
DDS_RTPS_AUTO_ID. The meaning of this flag depends on the value assigned to
rtps_auto_id_kind.
❏ rtps_host_id
❏ rtps_app_id
❏ rtps_instance_id
Depending on the rtps_auto_id_kind value, there are two different scenarios:
Scenario 1:
Table 8.17 DDS_RtpsWellKnownPorts_t
Type Field Name Description
DDS_Long
port_base
The base port offset. All mapped well-known
ports are offset by this value. Resulting ports
must be within the range imposed by the
underlying transport.
domain_id_gain
Tunable gain parameters. See Ports Used for
Discovery (Section 12.5).
participant_id_gain
builtin_multicast_port_offset
Additional offset for meta-traffic port. See
Inbound Ports for Meta-Traffic (Section 12.5.1).
builtin_unicast_port_offset
user_multicast_port_offset
Additional offset for user traffic port. See
Inbound Ports for User Traffic (Section 12.5.2).
user_unicast_port_offset

Chapter 8
8-72
In the default and most common scenario, rtps_auto_id_kind is set to
DDS_RTPS_AUTO_ID_FROM_IP. Doing so, each field is interpreted as follows:
❏ rtps_host_id: the 32 bit value of the IPv4 of the first up and running interface of
the host machine is assigned
❏ rtps_app_id: the process (or task) ID is assigned
❏ rtps_instance_id: A counter is assigned that is incremented per new participant
Note: If the IP address assigned to the interface is not unique within the network (for
instance, if it is not configured), then is it possible that the GUID (specifically, the
rtps_host_id portion) may also not be unique.
Scenario 2:
In this situation, RTI Data Distribution Service provides a different value for
rtps_auto_id_kind: DDS_RTPS_AUTO_ID_FROM_MAC. As the name suggests, this
alternative mechanism uses the MAC address instead of the IPv4 address. Since the
MAC address size is up to 64 bits, the logical mapping of the host information, the
application ID, and the instance identifiers has to change.
Note to Solaris Users: To use DDS_RTPS_AUTO_ID_FROM_MAC, you must run the
DDS application while logged in as ‘root.’
Using DDS_RTPS_AUTO_ID_FROM_MAC, the default value of each field is inter-
preted as follows:
❏ rtps_host_id: the first 32 bits of the MAC address of the first up and running
interface of the host machine are assigned
❏ rtps_app_id: the last 32 bits of the MAC address of the first up and running
interface of the host machine are assigned
❏ rtps_instance_id: this field is split into two different parts. The process (or task)
ID is assigned to the first 24 bits. A counter is assigned to the last 8 bits. This
counter is incremented per new participant. In both scenarios, you can change
the value of each field independently.
If DDS_RTPS_AUTO_ID_FROM_MAC is used, the rtps_instance_id has been logically
split into two parts: 24 bits for the process/task ID and 8 bits for the per new participant
counter. To give to users the ability to manually set the two parts independently, a bit
field mechanism has been introduced for the rtps_instance_id field when it is used in
combination with DDS_RTPS_AUTO_ID_FROM_MAC. If one of the two parts is set to
0, only this part will be handled by RTI Data Distribution Service and you will be able to
handle the other one manually.

8.5 DomainParticipant QosPolicies
8-73
8. Domains
Some examples are provided to better explain the behavior of this QoSPolicy in case you
want to change the default behavior with DDS_RTPS_AUTO_ID_FROM_MAC.
The first step is to get the DomainParticipant QoS from the DomainParticipantFactory:
DDS_DomainParticipantFactory_get_default_participant_qos(
DDS_DomainParticipantFactory_get_instance(),
&participant_qos);
Next, change the WireProtocolQosPolicy using one of the following options.
Then create the DomainParticipant as usual using the modified QoS structure instead of
the default one.
Option 1. Use DDS_RTPS_AUTO_ID_FROM_MAC to explicitly set just the applica-
tion/task identifier portion of the rtps_instance_id field:
participant_qos.wire_protocol.rtps_auto_id_kind =
DDS_RTPS_AUTO_ID_FROM_MAC;
participant_qos.wire_protocol.rtps_host_id = DDS_RTPS_AUTO_ID;
participant_qos.wire_protocol.rtps_app_id = DDS_RTPS_AUTO_ID;
participant_qos.wire_protocol.rtps_instance_id =
(/* App ID */ (12 << 8) |
/* Instance ID*/ (DDS_RTPS_AUTO_ID));
Option 2. Only set the per participant counter and let RTI Data Distribution Service han-
dle the application/task identifier:
participant_qos.wire_protocol.rtps_auto_id_kind =
DDS_RTPS_AUTO_ID_FROM_MAC;
participant_qos.wire_protocol.rtps_host_id = DDS_RTPS_AUTO_ID;
participant_qos.wire_protocol.rtps_app_id = DDS_RTPS_AUTO_ID;
participant_qos.wire_protocol.rtps_instance_id =
(/* App ID */ (DDS_RTPS_AUTO_ID) |
/* Instance ID*/ (12));
Option 3. Set the entire rtps_instance_id field yourself:
participant_qos.wire_protocol.rtps_auto_id_kind =
DDS_RTPS_AUTO_ID_FROM_MAC;
participant_qos.wire_protocol.rtps_host_id = DDS_RTPS_AUTO_ID;
participant_qos.wire_protocol.rtps_app_id = DDS_RTPS_AUTO_ID;
participant_qos.wire_protocol.rtps_instance_id =
( /* App ID */ (12 << 8)) |
/* Instance ID */ (9) )

Chapter 8
8-74
Note:
If you are using DDS_RTPS_AUTO_ID_FROM_MAC as
rtps_auto_id_kind and you decide to manually handle the rtps_instance_id
field, you must ensure that both parts are non-zero (otherwise RTI Data Distri-
bution Service will take responsibility for them).
RTI recommends that you always specify the two parts separately in order to
avoid errors.
Option 4. Let RTI Data Distribution Service handle the entire rtps_instance_id field:
participant_qos.wire_protocol.rtps_auto_id_kind =
DDS_RTPS_AUTO_ID_FROM_MAC;
participant_qos.wire_protocol.rtps_host_id = DDS_RTPS_AUTO_ID;
participant_qos.wire_protocol.rtps_app_id = DDS_RTPS_AUTO_ID;
participant_qos.wire_protocol.rtps_instance_id =
DDS_RTPS_AUTO_ID;
Note:
If you are using DDS_RTPS_AUTO_ID_FROM_MAC as
rtps_auto_id_kind and you decide to manually set the rtps_instance_id field,
you must ensure that both parts are non-zero (otherwise RTI Data Distribution
Service will take responsibility for them).
RTI recommends that you always specify the two parts separately in order to
clearly show the difference.
8.5.9.5 Example
On many real-time operating systems, and even on some non-real-time operating sys-
tems, when a node is rebooted, and applications are automatically started, process ids
are deterministically assigned. That is, when the system restarts or if an application dies
and is restarted, the application will be reassigned the same process or task ID.
This means that RTI Data Distribution Service’s automatic algorithm for creating unique
rtps_app_id’s will produce the same value between sequential instances of the same
application. This will confuse the other DomainParticipants on the network into thinking
that they are communicating with the previous instance of the application instead of a
new instance. Errors usually resulting in a failure to communicate will ensue.
Thus for applications running on nodes that may be rebooted without letting the appli-
cation shutdown appropriately (destroying the DomainParticipant), especially on nodes
running real-time operating systems like VxWorks or LynxOS, you will want to set the
rtps_app_id manually. We suggest that a strictly incrementing counter is stored either
on a file system or in non-volatile RAM is used for the rtps_app_id.
Whatever method you use, you should make sure that the rtps_app_id is unique across
all DomainParticipants running on a host as well as DomainParticipants that were recently

8.6 Clock Selection
8-75
8. Domains
running on the host. After a period configured through the DISCOVERY_CONFIG
QosPolicy existing applications will eventually flush old DomainParticipants that did
not properly shutdown from their databases. When that is done, then rtps_app_id may
be reused.
8.5.9.6 Properties
This QosPolicy cannot be modified after the DomainParticipant is created.
If manually set, it must be set differently for every DomainParticipant in the same
domain across all applications. The value of rtps_app_id should also between different
invocations of the same application; for example, when an application is restarted.
8.5.9.7 Related QosPolicies
❏ DISCOVERY_CONFIG QosPolicy (DDS Extension) (Section 8.5.3)
8.5.9.8 Applicable Entities
❏ DomainParticipants (Section 8.3)
8.5.9.9 System Resource Considerations
The use of this policy does not significantly impact the use of resources.
8.6 Clock Selection
RTI Data Distribution Service uses clocks to measure time and generate timestamps.
The middleware uses two clocks: an internal clock and an external clock.
❏ The internal clock measures time and handles all timing in the middleware.
❏ The external clock is used solely to generate timestamps (such as the source
timestamp and the reception timestamp), in addition to providing the time given
by the DomainParticipant’s get_current_time() operation (see Section 8.3.13.2).
8.6.1 Available Clocks
Two clock implementations are generally available: the realtime clock and the monotonic
clock.

Chapter 8
8-76
The realtime clock provides the real time of the system. This clock may generally be
monotonic, but may not be guaranteed to be so. It is adjustable and may be subject to
small and large changes in time. The time obtained from this clock is generally a mean-
ingful time, in that it is the amount of time from a known epoch. For the purposes of
clock selection, this clock can be referenced by the names "realtime" or "system".
The monotonic clock provides times that are monotonic from a clock that is not adjust-
able. This clock is not subject to changes in the system or realtime clock, which may be
adjusted by the user or via time synchronization protocols. However, this clock’s time
generally starts from an arbitrary point in time, such as system start-up. Note that the
monotonic clock is not available for all architectures. Please see the Platform Notes for
the architectures on which it is supported. For the purposes of clock selection, this clock
can be referenced by the name "monotonic".
8.6.2 Clock Selection Strategy
To configure the clock selection, use the DomainParticipant’s PROPERTY QosPolicy
(DDS Extension) (Section 6.5.15). Table 8.18 lists the supported properties.
By default, both the internal and external clocks use the realtime clock.
If you want your application to be robust to changes in the system time, you may use
the monotonic clock as the internal clock, and leave the system clock as the external
clock. However, note that this may slightly diminish performance, in that both the send
and receive paths may need to get times from both clocks.
Since the monotonic clock is not available on all architectures, you may want to specify
"monotonic, realtime" for the internal_clock property (see Table 8.18 on page 8-76). By
doing so, the middleware will attempt to use the monotonic clock if it is available, and
will fall back to the realtime clock if the monotonic clock is not available.
Table 8.18 Clock Selection Properties
Property Description
dds.clock.external_clock
Comma-delimited list of clocks to use for the external clock, in the
order of preference.
Valid clock names are “realtime”, “system”, or “monotonic”.
dds.clock.internal_clock
Comma-delimited list of clocks to use for the internal clock, in the
order of preference.
Valid clock names are “realtime”, “system”, or “monotonic”.

8.6 Clock Selection
8-77
8. Domains
If you want the application to be robust to changes in the system time, you are not rely-
ing on source timestamps, and you want to avoid obtaining times from both clocks, you
may use the monotonic clock for both the internal and external clocks.

Chapter 8
8-78

9-1
9. Building
Chapter 9 Building Applications
This chapter provides instructions on how to build RTI Data Distribution Service applica-
tions for the following platforms:
❏ UNIX-based Platforms (Section 9.3) (including Solaris™, Red Hat® and Yellow
Dog™ Linux, QNX®, and LynxOS® systems)
❏ Windows Platforms (Section 9.4)
❏ Java Platforms (Section 9.5)
While you can create applications for other operating systems, the platforms presented
in this chapter are a good starting point. We recommend that you first build and test
your application on one of these systems.
Instructions for other supported target platforms are provided in the Platform Notes.
To build a non-Java application using RTI Data Distribution Service, you must specify the
following items:
❏ NDDSHOME environment variable
❏ RTI Data Distribution Service header files
❏ RTI Data Distribution Service libraries to link
❏ Compatible system libraries
❏ Compiler options
To build Java applications using RTI Data Distribution Service, you must specify the fol-
lowing items:
❏ NDDSHOME environment variable
❏ RTI Data Distribution Service JAR file
❏ Compatible Java virtual machine (JVM)
Chapter 9
9-2
❏ Compiler options
This chapter describes the basic steps you will take to build an application on the above-
mentioned platforms. Specific details, such as exactly which libraries to link, compiler
flags, etc. are in the Platform Notes.
9.1 Running on a Computer Not Connected to a Network
If you want to run RTI Data Distribution Service applications on the same computer, and
that computer is not connected to a network, you must set NDDS_DISCOVERY_PEERS
so that it will only use shared memory. For example:
set NDDS_DISCOVERY_PEERS=4@shmem://
(The number 4 is only an example. This is the maximum participant ID. )
9.2 RTI Data Distribution Service Header Files — All
Architectures
You must include the appropriate RTI Data Distribution Service header files, which are
listed in Table 9.1. The header files that need to be included depend on the API being
used.
For the compiler to find the included files, the path to the appropriate include directo-
ries must be provided. Table 9.2 lists the appropriate include path for use with the com-
piler. The exact path depends on where you installed RTI Data Distribution Service. For
example, it may be C:\Program Files\RTI\ndds.4.5x\include or /opt/rti/ndds.4.5x/
include (where x stands for the version letter of the current release).
Table 9.1 Header Files to Include for RTI Data Distribution Service (All Architectures)
RTI Data Distribution Service API Header Files
C #include “ndds/ndds_c.h”
C++ #include “ndds/ndds_cpp.h”
C++/CLI, C#, Java none

9.3 UNIX-based Platforms
9-3
9. Building
$(NDDSHOME) should be set to the installation directory of RTI Data Distribution Ser-
vice 4.5x, where x stands for the version letter of the current release.
The header files that define the data types you want to use within the application also
need to be included. For example, Table 9.3 lists the files to be include for type “Foo”
(these are the filenames generated by rtiddsgen, described in Chapter 3).
9.3 UNIX-based Platforms
Before building an RTI Data Distribution Service application for a UNIX-based platform
(including Solaris, Red Hat and Yellow Dog Linux, QNX, and LynxOS systems), make
sure that:
❏ A supported version of your architecture is installed. See the Platform Notes for
supported architectures.
❏ RTI Data Distribution Service 4.4x is installed (where x stands for the version letter
of the current release). For installation instructions, refer to Section 2.1.1 in the
Getting Started Guide.
❏ A “make” tool is installed. RTI recommends gmake over make. If you do not
have gmake, you can download it from www.sunfreeware.com.
Table 9.2 Include Paths for Compilation (All Architectures)
RTI Data
Distribution
Service API Include Path Directories
C and C++
<your RTI Data Distribution Service installation directory>/include
<your RTI Data Distribution Service installation directory>/include/ndds
C++/CLI, C#, Java none
Table 9.3 Header Files to Include for Data Types (All Architectures)
RTI Data Distribution Service API User Data Type Header Files
C and C++
#include “Foo.h”
#include “FooSupport.h”
C++/CLI, C#, Java none

Chapter 9
9-4
❏ The NDDSHOME environment variable is set to the root directory of the RTI
Data Distribution Service installation (such as /opt/rti/ndds4.5x, where x stands
for the version letter of the current release). To confirm, type this at a command
prompt:
echo %NDDSHOME%
env | grep NDDSHOME
If it is not set or is set incorrectly, type:
setenv NDDSHOME <correct directory>
To compile an RTI Data Distribution Service application of any complexity, either modify
the auto-generated makefile created by running rtiddsgen or write your own makefile.
9.3.1 Required Libraries
All required system and RTI Data Distribution Service libraries are listed in the Platform
Notes.
You must choose between dynamic (shared) and static libraries. Do not mix the different
types of libraries during linking. The benefit of linking against the dynamic libraries is
that your final executables’ sizes will be significantly smaller. You will also use less
memory when you are running several RTI Data Distribution Service applications on the
same node. However, shared libraries require more set-up and maintenance during
upgrades and installations.
To see if dynamic libraries are supported for your target architecture, see the Platform
Notes
1
.
9.3.2 Compiler Flags
See the Platform Notes for information on compiler flags.
1. In the Platform Notes, see the “Building Instructions...” table for your target architecture.

9.4 Windows Platforms
9-5
9. Building
9.4 Windows Platforms
Before building an application for a Microsoft Windows® platform, make sure that:
❏ Supported versions of Windows and Visual C++ or Visual Studio .NET are
installed. See Section 9 in the Platform Notes.
❏ RTI Data Distribution Service 4.5x is installed (where x stands for the version letter
of the current release). For installation instructions, refer to the Section 2.1.2 in
the Getting Started Guide.
❏ The NDDSHOME environment variable is set to the root directory of the RTI
Data Distribution Service installation (such as C:\Program Files\RTI\ndds4.5x,
where x stands for the version letter of the current release). To confirm, type this
at a command prompt:
echo %NDDSHOME%
To compile an RTI Data Distribution Service application of any complexity, use a project
file in Microsoft Visual Studio. The project settings are described below. Section 9 in the
Getting Started Guide contains additional information.
9.4.1 Using Microsoft Visual C++ 6.0
1. From the menu bar, select Project, Settings...
2. Select the multi-threaded DLL project setting by following these steps:
a. Select the C/C++ tab.
b. From the Category pull-down menu, select Code Generation.
c. From the Use run-time library category, select one of the options from
Table 9.4.
Table 9.4 Runtime Library Settings for Visual Studio .NET & Visual Studio .NET 2003
If You are using this Library Format... Set the ‘Use run-time library’ field to...
Release version of static libraries Multi-threaded
Debug version of static libraries Debug Multi-threaded
Release version of dynamic libraries Multi-threaded DLL
Debug version of dynamic libraries Debug Multi-threaded DLL

Chapter 9
9-6
3. Link in the RTI Data Distribution Service and system libraries:
a. See Section 9 in the Platform Notes for a list of required libraries. You have a
choice of whether to link with RTI Data Distribution Service’s static or dynamic
libraries. Decide whether or not you want debugging symbols included.
b. Select the Link tab on the Project Settings Window.
c. From the Category: pull-down menu, select the Input option.
d. Add the appropriate RTI Data Distribution Service and system libraries to the
beginning of the Object/Library modules list. Be sure to use a space as a delim-
iter between libraries, not a comma. (Note that some of the system libraries
may already be in the list.)
e. Specify the path to the libraries in the Additional library path field by adding
the path for your specific architecture. For example:
c:\rti\ndds.4.5x\lib\i86Win32VC60
Your path may differ, depending on where you installed RTI Data Distribution
Service. Replace the x in 4.5x with the version letter for the current release.
4. Specify the path to RTI Data Distribution Service’s header files:
a. Select the C/C++ tab.
b. From the Category pull-down menu, select the Preprocessor option.
c. In the Additional include directories field, add paths to the “include” and
“include\ndds“ directories. For example:
c:\rti\ndds.4.5x\include\
c:\rti\ndds.4.5x\include\ndds
Your paths may differ, depending on where you installed RTI Data Distribu-
tion Service. Replace the x in 4.5x with the version letter for the current release.
5. Specify the compiler flags:
a. Select the C/C++ tab.
b. From the Category pull-down menu, select the Preprocessor option.
c. In the Preprocessor definitions field, add the compiler flags listed in
Table 9.2, “Building Instructions for Windows Host Architectures,” on page 3-
68. You will see the compiler flag appear in the Project Options field.

9.4 Windows Platforms
9-7
9. Building
9.4.2 Using Visual Studio .NET, Visual Studio .NET 2003, or Visual Studio 2005
1. Select the multi-threaded project setting:
a. From the Project menu, select Properties.
b. Select the C/C++ folder.
c. Select Code Generation.
d. Set the Runtime Library field to one of the options from Table 9.5.
2. Link against the RTI Data Distribution Service libraries:
a. Select the Linker folder on the Project, Properties dialog box.
b. Select the Input properties.
c. See Section 9 in the Platform Notes for a list of required libraries. You have a
choice of whether to link with RTI Data Distribution Service’s static or dynamic
libraries. Decide whether or not you want debugging symbols on. In either
case, be sure to use a space as a delimiter between libraries, not a comma. Add
the libraries to the beginning of the Additional Dependencies field.
d. Select the General properties.
e. Add one of the following to the Additional library path field:
$(NDDSHOME)\lib\i86Win32VC70 (for Visual Studio .NET)
$(NDDSHOME)\lib\i86Win32VS2003 (for Visual Studio .NET 2003)
$(NDDSHOME)\lib\i86Win32VS2005 (for Visual Studio .NET 2005)
3. Specify the path to RTI Data Distribution Service’s header file:
a. Select the C/C++ folder.
b. Select the General properties.
Table 9.5 Runtime Library Settings for Visual Studio .NET, Visual Studio .NET 2003, Visual Studio 2005
If You are using this Library Format... Set the Runtime Library field to...
Release version of static libraries Multi-threaded (/MT)
Debug version of static libraries Multi-threaded Debug (/MTd)
Release version of dynamic libraries Multi-threaded DLL (/MD)
Debug version of dynamic libraries Multi-threaded Debug DLL (/MDd)

Chapter 9
9-8
c. In the Additional include directories: field, add paths to the “include” and
“include\ndds” directories. For example:
c:\rti\ndds.4.5x\include\
c:\rti\ndds.4.5x\include\ndds
Your paths may differ, depending on where you installed RTI Data Distribu-
tion Service.
9.5 Java Platforms
Before building an application for a Windows or UNIX Java platform, make sure that:
❏ RTI Data Distribution Service 4.5x is installed (where x stands for the version letter
of the current release). For installation instructions, refer to Chapter 2 in the Get-
ting Started Guide.
❏ A supported version of the Java 2 software development kit (J2SDK) is installed.
See the Platform Notes.
9.5.1 Java Libraries
RTI Data Distribution Service requires that certain Java archive (JAR) files be on your
classpath when running RTI Data Distribution Service applications. See the Platform
Notes for more details.
9.5.2 Native Libraries
RTI Data Distribution Service for Java is implemented using Java Native Interface (JNI),
so it is necessary to provide your RTI Data Distribution Service distributed applications
access to certain native shared libraries. See the Platform Notes for more details.

Part 3: Advanced Concepts
This part of the manual will guide you through some of the more advanced concepts:
❏ Chapter 10: Reliable Communications
❏ Chapter 11: Mechanisms for Achieving Information Durability and Persistence
❏ Chapter 12: Discovery
❏ Chapter 13: Transport Plugins
❏ Chapter 14: Built-In Topics
❏ Chapter 15: Configuring QoS with XML
❏ Chapter 16: Multi-channel DataWriters
❏ Chapter 17: RTI Data Distribution Service Threading Model
❏ Chapter 18: Troubleshooting

Part 3. Advanced Concepts

10-1
10. Reliable
Chapter 10 Reliable Communications
RTI Data Distribution Service uses best-effort delivery by default. The other type of deliv-
ery RTI Data Distribution Service supports is called reliable. This chapter provides instruc-
tions on how to set up and use reliable communication.
This chapter includes the following sections:
❏ Sending Data Reliably (Section 10.1)
❏ Overview of the Reliable Protocol (Section 10.2)
❏ Using QosPolicies to Tune the Reliable Protocol (Section 10.3)
10.1 Sending Data Reliably
The DCPS reliability model recognizes that the optimal balance between time-determin-
ism and data-delivery reliability varies widely among applications and can vary among
different publications within the same application. For example, individual samples of
signal data can often be dropped because their value disappears when the next sample is
sent. However, each sample of command data must be received and it must be received
in the order sent.
The QosPolicies provide a way to customize the determinism/reliability trade-off on a
per Top ic basis, or even on a per DataWriter/DataReader basis.

Chapter 10
10-2
There are two delivery models:
❏ Best-effort delivery mode “I’m not concerned about missed or unordered sam-
ples.”
❏ Reliable delivery model “Make sure all samples get there, in order.”
10.1.1 Best-effort Delivery Model
By default, RTI Data Distribution Service uses the best-effort delivery model: there is no
effort spent ensuring in-order delivery or resending lost samples. Best-effort DataRead-
ers ignore lost samples in favor of the latest sample. Your application is only notified if it
does not receive a new sample within a certain time period (set in the DEADLINE
QosPolicy (Section 6.5.4)).
The best-effort delivery model is best for time-critical information that is sent continu-
ously. For instance, consider a DataWriter for the value of a sensor device (such as a the
pressure inside a tank), and assume the DataWriter sends samples continuously. In this
situation, a DataReader for this Topic is only interested in having the latest pressure read-
ing available—older samples are obsolete.
10.1.2 Reliable Delivery Model
Reliable delivery means the samples are guaranteed to arrive, in the order published.
The DataWriter maintains a send queue with space to hold the last X number of samples
sent. Similarly, a DataReader maintains a receive queue with space for consecutive X
expected samples.
The send and receive queues are used to temporarily cache samples until RTI Data Distri-
bution Service is sure the samples have been delivered and are not needed anymore. RTI
Data Distribution Service removes samples from a publication’s send queue after the sam-
ple has been acknowledged by all reliable subscriptions. When positive acknowledge-
ments are disabled (see DATA_WRITER_PROTOCOL QosPolicy (DDS Extension)
(Section 6.5.2) and DATA_READER_PROTOCOL QosPolicy (DDS Extension) (Section
7.6.1)), samples are removed from the send queue after the corresponding keep-dura-
tion has elapsed (see Table 6.29, “DDS_RtpsReliableWriterProtocol_t,” on page 6-95).
If an out-of-order sample arrives, RTI Data Distribution Service speculatively caches it in
the DataReader’s receive queue (provided there is space in the queue). Only consecutive
samples are passed on to the DataReader.
DataWriters can be set up to wait for available queue space when sending samples. This
will cause the sending thread to block until there is space in the send queue. (Or, you can

10.1 Sending Data Reliably
10-3
10. Reliable
decide to sacrifice sending samples reliably so that the sending rate is not compro-
mised.) If the DataWriter is set up to ignore the full queue and sends anyway, then older
cached samples will be pushed out of the queue before all DataReaders have received
them. In this case, the DataReader (or its Subscriber) is notified of the missing samples
through its Listener and/or Conditions.
RTI Data Distribution Service automatically sends acknowledgments (ACKNACKs) as
necessary to maintain reliable communications. The DataWriter may choose to block for
a specified duration to wait for these acknowledgments (see Waiting for Acknowledg-
ments (Section 6.3.10)).
RTI Data Distribution Service establishes a virtual reliable channel between the matching
DataWriter and all DataReaders. This mechanism isolates DataReaders from each other,
allows the application to control memory usage, and provides mechanisms for the
DataWriter to balance reliability and determinism. Moreover, the use of send and receive
queues allows RTI Data Distribution Service to be implemented efficiently without intro-
ducing unnecessary delays in the stream.
Note that a successful return code (DDS_RETCODE_OK) from write() does not neces-
sarily mean that all DataReaders have received the data. It only means that the sample
has been added to the DataWriter’s queue. To see if all DataReaders have received the
data, look at the RELIABLE_WRITER_CACHE_CHANGED Status (DDS Extension)
(Section 6.3.5.7) to see if any samples are unacknowledged.
Suppose DataWriter A reliably publishes a Topic to which DataReaders B and C reliably
subscribe. B has space in its queue, but C does not. Will DataWriter A be notified? Will
DataReader C receive any error messages or callbacks? The exact behavior depends on
the QoS settings:
❏ If HISTORY_KEEP_ALL is specified for C, C will reject samples that cannot be
put into the queue and request A to resend missing samples. The Listener is noti-
fied with the on_sample_rejected() callback (see SAMPLE_REJECTED Status
(Section 7.3.6.8)). If A has a queue large enough, or A is no longer writing new
samples, A won’t notice unless it checks the
RELIABLE_WRITER_CACHE_CHANGED Status (DDS Extension) (Section
6.3.5.7).
❏ If HISTORY_KEEP_LAST is specified for C, C will drop old samples and accept
new ones. The Listener is notified with the on_sample_lost() callback (see
SAMPLE_LOST Status (Section 7.3.6.7)). To A, it is as if all samples have been
received by C (that is, they have all been acknowledged).

Chapter 10
10-4
10.2 Overview of the Reliable Protocol
An important advantage of RTI Data Distribution Service is that it can offer the reliability
and other QoS guarantees mandated by DDS on top of a very wide variety of transports,
including packet-based transports, unreliable networks, multicast-capable transports,
bursty or high-latency transports, etc. RTI Data Distribution Service is also capable of
maintaining liveliness and application-level QoS even in the presence of sporadic con-
nectivity loss at the transport level, an important benefit in mobile networks. RTI Data
Distribution Service accomplishes this by implementing a reliable protocol that
sequences and acknowledges application-level messages and monitors the liveliness of
the link. This is called the Real-Time Publish-Subscribe (RTPS) protocol; it is an open,
international standard.
1
In order to work in this wide range of environments, the reliable protocol defined by
RTPS is highly configurable with a set of parameters that let the application fine-tune its
behavior to trade-off latency, responsiveness, liveliness, throughput, and resource utili-
zation. This section describes the most important features to the extent needed to under-
stand how the configuration parameters affect its operation.
The most important features of the RTPS protocol are:
❏ Support for both push and pull operating modes
❏ Support for both positive and negative acknowledgments
❏ Support for high data-rate DataWriters
❏ Support for multicast DataReaders
❏ Support for high-latency environments
In order to support these features, RTPS uses several types of messages: Data messages
(DATA), acknowledgments (ACKNACKs), and heartbeats (HBs).
❏ DATA messages contain snapshots of the value of data-objects and associate the
snapshot with a sequence number that RTI Data Distribution Service uses to iden-
tify them within the DataWriter’s history. These snapshots are stored in the his-
tory as a direct result of the application calling write() on the DataWriter.
Incremental sequence numbers are automatically assigned by the DataWriter
each time write() is called. In Figure 10.1 through Figure 10.7, these messages are
represented using the notation DATA(<value>, <sequenceNum>). For example,
1. For a link to the RTPS specification, see the RTI website, www.rti.com.

10.2 Overview of the Reliable Protocol
10-5
10. Reliable
DATA(A,1) represents a message that communicates the value ‘A’ and associates
the sequence number ‘1’ with this message. A DATA is used for both keyed and
non-keyed data types.
❏ HB messages announce to the DataReader that it should have received all snap-
shots up to the one tagged with a range of sequence numbers and can also
request the DataReader to send an acknowledgement back. For example, HB(1-3)
indicates to the DataReader that it should have received snapshots tagged with
sequence numbers 1, 2, and 3 and asks the DataReader to confirm this.
❏ ACKNACK messages communicate to the DataWriter that particular snapshots
have been successfully stored in the DataReader’s history. ACKNACKs also tell
the DataWriter which snapshots are missing on the DataReader side. The ACK-
NACK message includes a set of sequence numbers represented as a bit map.
The sequence numbers indicate which ones the DataReader is missing. (The bit
map contains the base sequence number that has not been received, followed by
the number of bits in bit map and the optional bit map. The maximum size of the
bit map is 256.) All numbers up to (not including) those in the set are considered
positively acknowledged. They are represented in Figure 10.1 through
Figure 10.7 as ACKNACK(<first-missing>) or ACKNACK(<first-missing>-
<last-missing>). For example, ACKNACK(4) indicates that the snapshots with
sequence numbers 1, 2, and 3 have been successfully stored in the DataReader
history, and that 4 has not been received.
It is important to note that RTI Data Distribution Service can bundle multiple of the above
messages within a single network packet. This ‘submessage bundling’ provides for
higher performance communications.
Figure 10.1 illustrates the basic behavior of the protocol when an application calls the
write() operation on a DataWriter that is associated with a DataReader. As mentioned, the
RTPS protocol can bundle multiple submessages into a single network packet. In
Figure 10.1 this feature is used to piggyback a HB message to the DATA message. Note
that before the message is sent, the data is given a sequence number (1 in this case)
which is stored in the DataWriter’s send queue. As soon as the message is received by
the DataReader, it places it into the DataReader’s receive queue. From the sequence num-
ber the DataReader can tell that it has not missed any messages and therefore it can make
the data available immediately to the user (and call the DataReaderListener). This is indi-
cated by the “✔” symbol. The reception of the HB(1) causes the DataReader to check that
it has indeed received all updates up to and including the one with sequenceNumber=1.
Since this is true, it replies with an ACKNACK(2) to positively acknowledge all mes-
sages up to (but not including) sequence number 2. The DataWriter notes that the
update has been acknowledged, so it no longer needs to be retained in its send queue.
This is indicated by the “✔” symbol.

Chapter 10
10-6
Figure 10.1 Basic RTPS Reliable Protocol
DataWriter DataReader
w
r
i
t
e
(
A
)
1AX
1A✔
cache (A, 1)
Assigned sequence number
History of send data values
Whether or not the sample
has been delivered to the
reader history
acked (1)
1A✔
cache (A, 1)
check (1)
time
DataReader
history
Assigned sequence
number
Whether or not the
sample is available
for the application
to read/take
time
A
C
K
N
A
C
K
(
2
)
D
A
T
A
(
A
,
1
)
;
H
B
(
1
)

10.2 Overview of the Reliable Protocol
10-7
10. Reliable
Figure 10.2 RTPS Reliable Protocol in the Presence of Message Loss
DataWriter DataReader
cache (A, 1)
cache(B,2)
cache (B,2)
time
D
A
T
A
(
A
,
1
)
;
H
B
(
1
)
1AX
write(S01)
U
write(S02)
1AX
2BX
get(1)
D
A
T
A
(
B
,
2
)
;
H
B
(
1
-
2
)
time
A
C
K
N
A
C
K
(
1
)
1X
2BX
1A✔
2B✔
D
A
T
A
(
A
,
1
)
cache (A,1)
cache(C,3)
write(S03)
1AX
2BX
3CX
D
A
T
A
(
C
,
3
)
;
H
B
(
1
-
3
)
1A✔
2B✔
3C✔
cache (C,3)
check(1-3)
A
C
K
N
A
C
K
(
4
)
acked(1-3)
1A✔
2B✔
3C✔
See Figure 10.1 for meaning of
table columns.

Chapter 10
10-8
Figure 10.2 illustrates the behavior of the protocol in the presence of lost messages.
Assume that the message containing DATA(A,1) is dropped by the network. When the
DataReader receives the next message (DATA(B,2); HB(1-2)) the DataReader will notice
that the data associated with sequence number 1 was never received. It realizes this
because the heartbeat HB(1-2) tells the DataReader that it should have received all mes-
sages up to and including the one with sequence number 2. This realization has two
consequences:
1. The data associated with sequence number 2 (B) is tagged with ‘X’ to indicate
that it is not deliverable to the application (that is, it should not be made avail-
able to the application, because the application needs to receive the data associ-
ated with sample 1 (A) first).
2. An ACKNACK(1) is sent to the DataWriter to request that the data tagged with
sequence number 1 be resent.
Reception of the ACKNACK(1) causes the DataWriter to resend DATA(A,1). Once the
DataReader receives it, it can ‘commit’ both A and B such that the application can now
access both (indicated by the “✔”) and call the DataReaderListener. From there on, the
protocol proceeds as before for the next data message (C) and so forth.
A subtle but important feature of the RTPS protocol is that ACKNACK messages are
only sent as a direct response to HB messages. This allows the DataWriter to better con-
trol the overhead of these ‘administrative’ messages. For example, if the DataWriter
knows that it is about to send a chain of DATA messages, it can bundle them all and
include a single HB at the end, which minimizes ACKNACK traffic.

10.3 Using QosPolicies to Tune the Reliable Protocol
10-9
10. Reliable
10.3 Using QosPolicies to Tune the Reliable Protocol
Reliability is controlled by the QosPolicies in Table 10.1. To enable reliable delivery, read
the following sections to learn how to change the QoS for the DataWriter and
DataReader:
❏ Enabling Reliability (Section 10.3.1)
❏ Tuning Queue Sizes and Other Resource Limits (Section 10.3.2)
❏ Controlling Heartbeats and Retries with the DataWriterProtocol QosPolicy (Sec-
tion 10.3.4)
❏ Avoiding Message Storms with DataReaderProtocol QosPolicy (Section 10.3.5)
❏ Resending Samples to Late-Joiners with the Durability QosPolicy (Section 10.3.6)
Then see this section to explore example use cases:
❏ Use Cases (Section 10.3.7)
Table 10.1 QosPolicies for Reliable Communications
QosPolicy Description
Related
Entities
a
Reference
Reliability
To establish reliable communication, this QoS
must be set to
DDS_RELIABLE_RELIABILITY_QOS for
the DataWriter and its DataReaders.
DW, DR
Section 10.3.1,
Section 6.5.17
ResourceLimits
This QoS determines the amount of resources
each side can use to manage instances and
samples of instances. Therefore it controls the
size of the DataWriter’s send queue and the
DataReader’s receive queue. The send queue
stores samples until they have been ACKed
by all DataReaders. The DataReader’s receive
queue stores samples for the user’s applica-
tion to access.
DW, DR
Section 10.3.2,
Section 6.5.18
History
This QoS affects how a DataWriter/
DataReader behaves when its send/receive
queue fills up.
DW, DR
Section 10.3.3,
Section 6.5.8

Chapter 10
10-10
10.3.1 Enabling Reliability
You must modify the RELIABILITY QosPolicy (Section 6.5.17) of the DataWriter and
each of its reliable DataReaders. S
et the kind field to DDS_RELIABLE_RELIABILITY_QOS:
❏ DataWriter
writer_qos.reliability.kind = DDS_RELIABLE_RELIABILITY_QOS;
❏ DataReader
reader_qos.reliability.kind = DDS_RELIABLE_RELIABILITY_QOS;
10.3.1.1 Blocking until the Send Queue Has Space Available
The max_blocking_time property in the RELIABILITY QosPolicy (Section 6.5.17) indi-
cates how long a DataWriter can be blocked during a write().
DataWriterProtocol
This QoS configures DataWriter-specific pro-
tocol. The QoS can disable positive ACKs for
its DataReaders.
DW
Section 10.3.4,
Section 6.5.2
DataReaderProtocol
When a reliable DataReader receives a heart-
beat from a DataWriter and needs to return an
ACKNACK, the DataReader can choose to
delay a while. This QoS sets the minimum
and maximum delay. It can also disable posi-
tive ACKs for the DataReader.
DR
Section 10.3.5,
Section 7.6.1
DataReader-
ResourceLimits
This QoS determines additional amounts of
resources that the DataReader can use to man-
age samples (namely, the size of the
DataReader’s receive queue, which stores sam-
ples until they are ordered for reliability and
can be moved to the DataReader’s receive
queue for access by the user’s application).
DR
Section 10.3.2,
Section 7.6.2
Durability
This QoS affects whether late-joining
DataReaders will receive all previously-sent
data or not.
DW, DR
Section 10.3.6,
Section 6.5.6
a. DW = DataWriter, DR = DataReader
Table 10.1
QosPolicies for Reliable Communications
QosPolicy Description
Related
Entities
a
Reference

10.3 Using QosPolicies to Tune the Reliable Protocol
10-11
10. Reliable
If max_blocking_time is non-zero and the send queue is full, the write is blocked (the
sample is not sent). If max_blocking_time has passed and the sample is still not sent,
write() returns DDS_RETCODE_TIMEOUT and the sample is not sent.
If the number of unacknowledged samples in the send queue drops below
max_samples (set in the RESOURCE_LIMITS QosPolicy (Section 6.5.18)
) before
max_blocking_time, the sample is sent and write() returns DDS_RETCODE_OK.
If max_blocking_time is zero and the send queue is full, write() returns
DDS_RETCODE_TIMEOUT and the sample is not sent.
10.3.2 Tuning Queue Sizes and Other Resource Limits
Set the HISTORY QosPolicy (Section 6.5.8) appropriately to accommodate however
many samples should be saved in the DataWriter’s send queue or the DataReader’s
receive queue. The defaults may suit your needs; if so, you do not have to modify this
QosPolicy.
For more information, see the following sections:
❏ Understanding the Send Queue and Setting its Size (Section 10.3.2.1)
❏ Understanding the Receive Queue and Setting Its Size (Section 10.3.2.2)
Note: The HistoryQosPolicy’s depth must be less than or equal to the ResourceLim-
itsQosPolicy’s max_samples_per_instance; max_samples_per_instance must be less
than or equal to the ResourceLimitsQosPolicy’s max_samples (see RESOURCE_LIMITS
QosPolicy (Section 6.5.18)), and max_samples_per_remote_writer (see
DATA_READER_RESOURCE_LIMITS QosPolicy (DDS Extension) (Section 7.6.2)) must
be less than or equal to max_samples.
❏ depth <= max_samples_per_instance <= max_samples
❏ max_samples_per_remote_writer <= max_samples
Examples:
❏ DataWriter
writer_qos.resource_limits.initial_instances = 10;
writer_qos.resource_limits.initial_samples = 200;
writer_qos.resource_limits.max_instances = 100;
writer_qos.resource_limits.max_samples = 2000;
writer_qos.resource_limits.max_samples_per_instance = 20;
writer_qos.history.depth = 20;

Chapter 10
10-12
❏ DataReader
reader_qos.resource_limits.initial_instances = 10;
reader_qos.resource_limits.initial_samples = 200;
reader_qos.resource_limits.max_instances = 100;
reader_qos.resource_limits.max_samples = 2000;
reader_qos.resource_limits.max_samples_per_instance = 20;
reader_qos.history.depth = 20;
reader_qos.reader_resource_limits.max_samples_per_remote_writer
= 20;
10.3.2.1 Understanding the Send Queue and Setting its Size
A DataWriter’s send queue is used to store each sample it writes. A sample will be
removed from the send queue after it has been acknowledged (through an ACKNACK)
by all the reliable DataReaders. A DataReader can request that the DataWriter resend a
missing sample (through an ACKNACK). If that sample is still available in the send
queue, it will be resent. To elicit timely ACKNACKs, the DataWriter will regularly send
heartbeats to its reliable DataReaders.
A DataWriter’s send queue size is determined by its RESOURCE_LIMITS QosPolicy
(Section 6.5.18), specifically the max_samples field. The appropriate value depends on
application parameters such as how fast the publication calls write().
Strict reliability: If a DataWriter does not receive ACKNACKs from one or more reliable
DataReaders, it is possible for the send queue to fill up. If you want to achieve strict reli-
ability, the kind field in the HISTORY QosPolicy (Section 6.5.8) for both the DataReader
and DataWriter must be set to KEEP_ALL, positive acknowledgments must be enabled
for both the DataReader and DataWriter, and your publishing application should wait
until space is available in the queue before writing any more samples. RTI Data Distribu-
tion Service provides two mechanisms to do this:
❏ Allow the write() operation to block until there is space in the queue again to
store the sample. The maximum time this call blocks is determined by the
max_blocking_time field in the RELIABILITY QosPolicy (Section 6.5.17) (also dis-
cussed in Section 10.3.1.1).
❏ Use the DataWriter’s Listener to be notified when the queue fills up or empties
again.
When the HISTORY QosPolicy (Section 6.5.8) on the DataWriter is set to KEEP_LAST,
strict reliability is not guaranteed. When there are depth number of samples in the queue
(set in the HISTORY QosPolicy (Section 6.5.8), see Section 10.3.3) the oldest sample will
be dropped from the queue when a new sample is written. Note that in such a reliable
mode, the DataWriter will never block, but strict reliability is no longer guaranteed. If

10.3 Using QosPolicies to Tune the Reliable Protocol
10-13
10. Reliable
there is a request for the purged sample from any DataReaders, the DataWriter will send
a heartbeat that no longer contains the sequence number of the dropped sample (it will
not be able to send the sample).
The send queue size is set in the max_samples field of the RESOURCE_LIMITS QosPol-
icy (Section 6.5.18). The appropriate size for the send queue depends on application
parameters (such as the send rate), channel parameters (such as end-to-end delay and
probability of packet loss), and quality of service requirements (such as maximum
acceptable probability of sample loss).
The DataReader’s receive queue size should generally be larger than the DataWriter’s
send queue size. Receive queue size is discussed in Section 10.3.2.2.
A good rule of thumb, based on a simple model that assumes individual packet drops
are not correlated and time-independent, is that the size of the send queue, N, is as
shown in Figure 10.3.
In the above equation, R is the rate of sending samples, T is the round-trip transmission
time, p is the probability of a packet loss in a round trip, and Q is the required probabil-
ity that a sample is eventually successfully delivered. Of course, network-transport
dropouts must also be taken into account and may influence or dominate this calcula-
tion.
Table 10.2 gives the required size of the send queue for several common scenarios.
Figure 10.3 Calculating Minimum Send Queue Size for a Desired Level of Reliability
Simple formula for determining the minimum size of the send queue required for strict reliability.
N 2RT
1 Q–()log
p()log
--------------------------=
Table 10.2 Required Size of the Send Queue for Different Network Parameters
Q
a
p
b
T
c
R
d
N
e
99% 1% 0.001
f
sec 100 Hz 1
99% 1% 0.001 sec 2000 Hz 2
99% 5% 0.001 sec 100 Hz 1
99% 5% 0.001 sec 2000 Hz 4
99.99% 1% 0.001 sec 100 Hz 1
99.99% 1% 0.001 sec 2000 Hz 6

Chapter 10
10-14
Note: Packet loss on a network frequently happens in bursts, and the packet loss events
are correlated. This means that the probability of a packet being lost is much higher if
the previous packet was lost because it indicates a congested network or busy receiver.
For this situation, it may be better to use a queue size that can accommodate the longest
period of network congestion, as illustrated in Figure 10.4.
In the above equation R is the rate of sending samples, D(Q) is a time such that Q per-
cent of the dropouts are of equal or lesser length, and Q is the required probability that a
sample is eventually successfully delivered. The problem with the above formula is that
it is hard to determine the value of D(Q) for different values of Q.
For example, if we want to ensure that 99.9% of the samples are eventually delivered
successfully, and we know that the 99.9% of the network dropouts are shorter than 0.1
seconds, then we would use N = 0.1*R. So for a rate of 100Hz, we would use a send
queue of N = 10; for a rate of 2000Hz, we would use N = 200.
10.3.2.2 Understanding the Receive Queue and Setting Its Size
Samples are stored in the DataReader’s receive queue, which is accessible to the user’s
application.
A sample is removed from the receive queue after it has been accessed by take(), as
described in Accessing Data Samples with Read or Take (Section 7.4.3). Note that read()
does not remove samples from the queue.
99.99% 5% 0.001 sec 100 Hz 1
99.99% 5% 0.001 sec 2000 Hz 8
a. "Q" is the desired level of reliability measured as the probability that any data update will eventually be
delivered successfully. In other words, percentage of samples that will be successfully delivered.
b. "p" is the probability that any single packet gets lost in the network.
c. "T" is the round-trip transport delay in the network
d. "R" is the rate at which the publisher is sending updates.
e. "N" is the minimum required size of the send queue to accomplish the desired level of reliability "Q".
f. The typical round-trip delay for a dedicated 100 Mbit/second ethernet is about 0.001 seconds.
Table 10.2
Required Size of the Send Queue for Different Network Parameters
Q
a
p
b
T
c
R
d
N
e
Figure 10.4 Calculating Minimum Send Queue Size for Networks with Dropouts
Send queue size as a function of send rate "R" and maximum dropout time D.
NRDQ()=

10.3 Using QosPolicies to Tune the Reliable Protocol
10-15
10. Reliable
A DataReader's receive queue size is limited by its RESOURCE_LIMITS QosPolicy (Sec-
tion 6.5.18), specifically the max_samples field. The storage of out-of-order samples for
each DataWriter is also allocated from the DataReader’s receive queue; this sample
resource is shared among all reliable DataWriters. That is, max_samples includes both
ordered and out-of-order samples.
A DataReader can maintain reliable communications with multiple DataWriters (e.g., in
the case of the OWNERSHIP_STRENGTH QosPolicy (Section 6.5.14) setting of
SHARED). The maximum number of out-of-order samples from any one DataWriter that
can occupy in the receive queue is set in the max_samples_per_remote_writer field of
the DATA_READER_RESOURCE_LIMITS QosPolicy (DDS Extension) (Section 7.6.2);
this value can be used to prevent a single DataWriter from using all the space in the
receive queue. max_samples_per_remote_writer must be set to be <= max_samples.
The DataReader will cache samples that arrive out of order while waiting for missing
samples to be resent. (Up to 256 samples can be resent; this limitation is imposed by the
wire protocol.) If there is no room, the DataReader has to reject out-of-order samples and
request them again later after the missing samples have arrived.
The appropriate size of the receive queue depends on application parameters, such as
the DataWriter’s sending rate and the probability of a dropped sample. However, the
receive queue size should generally be larger than the send queue size. Send queue size
is discussed in Section 10.3.2.1.
Figure 10.5 and Figure 10.6 compare two hypothetical DataReaders, both interacting
with the same DataWriter. The queue on the left represents an ordering cache, allocated
from receive queue—samples are held here if they arrive out of order. The DataReader in
Figure 10.5 on page 10-16 has a sufficiently large receive queue (max_samples) for the
given send rate of the DataWriter and other operational parameters. In both cases, we
assume that all samples are taken from the DataReader in the Listener callback. (See
Accessing Data Samples with Read or Take (Section 7.4.3) for information on take() and
related operations.)
In Figure 10.6 on page 10-17, max_samples
is too small to cache out-of-order samples
for the same operational parameters. In both cases, the DataReaders eventually receive
all the samples in order. However, the DataReader with the larger max_samples will get
the samples earlier and with fewer transactions. In particular, sample “4” is never resent
for the DataReader with the larger queue size.

Chapter 10
10-16
Figure 10.5 Effect of the Receive-Queue Size on Performance: Large Queue Size
Sample 1 is taken
Send Sample “1”
A
C
K
N
A
C
K
“
2
”
3
1
5
Note: no unordered samples cached
Send Sample “2”
Send Sample “3”
Send Sample “4”
Re-send Sample “2”
Send Sample “5”
2
34
34
Space reserved for missing sample “2”.
Samples “3” and “4” are cached
while waiting for missing sample “2”.
Samples 2-4 are taken
Sample 5 is taken
max_samples is 4. This also limits the
number of unordered samples that
can be cached.
Sample
“2” lost.
DataWriter DataReader
H
B
(
1
-
3
)
Send HeartBeat

10.3 Using QosPolicies to Tune the Reliable Protocol
10-17
10. Reliable
Figure 10.6 Effect of Receive Queue Size on Performance: Small Queue Size
Move sample 1 to receive queue.
Send Sample “1”
A
C
K
N
A
C
K
(
2
)
3
1
Note: no unordered samples cached
Send Sample “2”
Send Heartbeat
Send Sample “4”
Re-send Sample “2”
Send Sample “5”
2
Space reserved for missing sample “2”.
Sample “4” must be dropped
because it does not fit in the queue.
Move samples 2 and 3 to receive queue.
Move samples 4 and 5 to receive queue.
max_samples is 2. This also limits the
number of unordered samples that
can be cached.
Sample
“2” lost
3
3
5
Space reserved for missing sample “4”.
Re-send Sample “4”
54
DataWriter DataReader
A
C
K
N
A
C
K
(
4
)
Send Sample “3”
H
B
(
1
-
3
)
Send Heartbeat
H
B
(
1
-
5
)

Chapter 10
10-18
10.3.3 Controlling Queue Depth with the History QosPolicy
If you want to achieve strict reliability, set the kind field in the HISTORY QosPolicy (Sec-
tion 6.5.8) for both the DataReader and DataWriter to KEEP_ALL; in this case, the depth
does not matter.
Or, for non-strict reliability, you can leave the kind set to KEEP_LAST (the default). This
will provide non-strict reliability; some samples may not be delivered if the resource
limit is reached.
The depth field in the HISTORY QosPolicy (Section 6.5.8)
controls how many samples
RTI Data Distribution Service will attempt to keep on the DataWriter’s send queue or the
DataReader’s receive queue. For reliable communications, depth
should be >= 1. The
depth can be set to 1, but cannot be more than the max_samples_per_instance in
RESOURCE_LIMITS QosPolicy (Section 6.5.18).
Example:
❏ DataWriter
writer_qos.history.depth =
<number of samples to keep in send queue>;
❏ DataReader
reader_qos.history.depth =
<number of samples to keep in receive queue>;
10.3.4 Controlling Heartbeats and Retries with the DataWriterProtocol QosPolicy
In the RTI Data Distribution Service reliability model, the DataWriter sends data samples
and heartbeats to reliable DataReaders. A DataReader responds to a heartbeat by sending
an ACKNACK, which tells the DataWriter what the DataReader has received so far.
In addition, the DataReader can request missing samples (by sending an ACKNACK)
and the DataWriter will respond by resending the missing samples. This section
describes some advanced timing parameters that control the behavior of this mecha-
nism. Many applications do not need to change these settings. These parameters are
contained in the DATA_WRITER_PROTOCOL QosPolicy (DDS Extension) (Section
6.5.2).
The protocol described in Overview of the Reliable Protocol (Section 10.2) uses very
simple rules such as piggybacking HB messages to each DATA message and responding
immediately to ACKNACKs with the requested repair messages. While correct, this
protocol would not be capable of accommodating optimum performance in more
advanced use cases.

10.3 Using QosPolicies to Tune the Reliable Protocol
10-19
10. Reliable
This section describes some of the parameters configurable by means of the
rtps_reliable_writer structure in the DATA_WRITER_PROTOCOL QosPolicy (DDS
Extension) (Section 6.5.2) and how they affect the behavior of the RTPS protocol.
10.3.4.1 How Often Heartbeats are Resent (heartbeat_period)
If a DataReader does not acknowledge a sample that has been sent, the DataWriter
resends the heartbeat. These heartbeats are resent at the rate set in the
DATA_WRITER_PROTOCOL QosPolicy (DDS Extension) (Section 6.5.2), specifically its
heartbeat_period field.
For example, a heartbeat_period of 3 seconds means that if a DataReader does not
receive the latest sample (for example, it gets dropped by the network), it might take up
to 3 seconds before the DataReader realizes it is missing data. The application can lower
this value when it is important that recovery from packet loss is very fast.
The basic approach of sending HB messages as a piggyback to DATA messages has the
advantage of minimizing network traffic. However, there is a situation where this
approach, by itself, may result in large latencies. Suppose there is a DataWriter that
writes bursts of data, separated by relatively long periods of silence. Furthermore
assume that the last message in one of the bursts is lost by the network. This is the case
shown for message DATA(B, 2) in Figure 10.7. If HBs were only sent piggybacked to
DATA messages, the DataReader would not realize it missed the ‘B’ DATA message with
sequence number ‘2’ until the DataWriter wrote the next message. This may be a long
time if data is written sporadically. To avoid this situation, RTI Data Distribution Service
can be configured so that HBs are sent periodically as long as there are samples that
have not been acknowledged even if no data is being sent. The period at which these
HBs are sent is configurable by setting the heartbeat_period field in the
DATA_WRITER_PROTOCOL QosPolicy (DDS Extension) (Section 6.5.2).
Note that a small value for the heartbeat_period will result in a small worst-case latency
if the last message in a burst is lost. This comes at the expense of the higher overhead
introduced by more frequent HB messages.
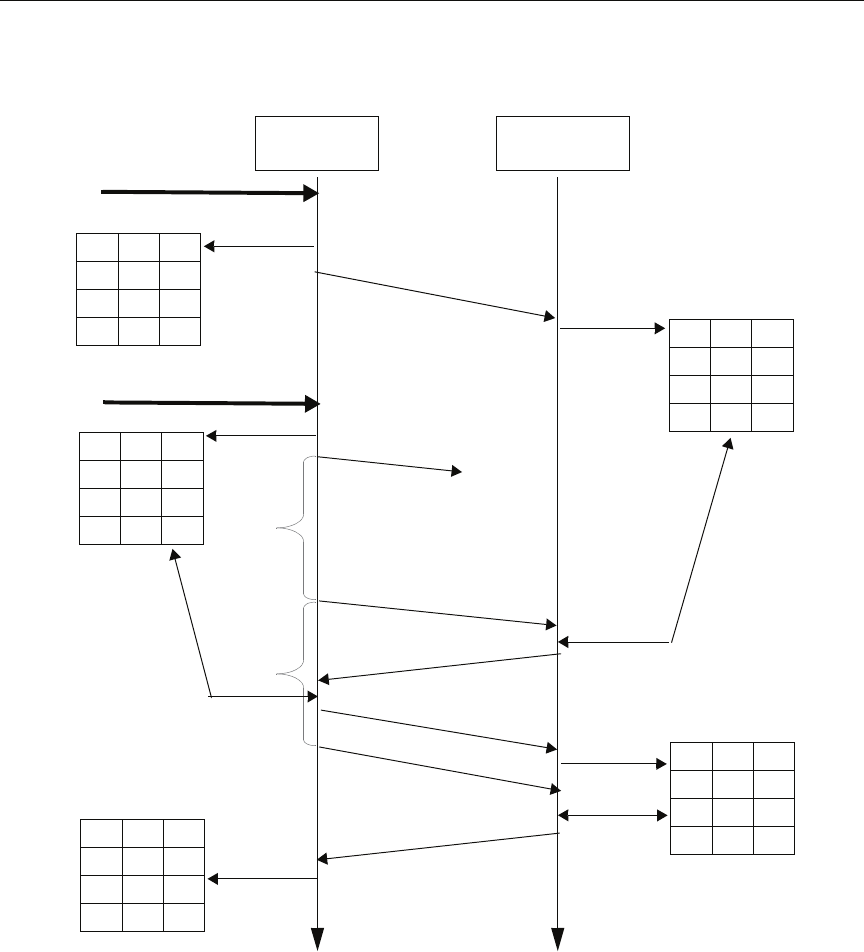
Chapter 10
10-20
Figure 10.7 Use of heartbeat_period
DataWriter DataReader
cache (A, 1)
cache(B,2)
cache (A,1)
time
D
A
T
A
(
A
,
1
)
1AX
write(A)
U
write(B)
1AX
2BX
D
A
T
A
(
B
,
2
)
time
A
C
K
N
A
C
K
(
2
)
1A✔
H
B
(
1
-
2
)
1A✔
2B✔
cache (B,2)
check(1-2)
A
C
K
N
A
C
K
(
3
)
acked(1-2)
1A✔
2B✔
heartbeat_period
check(1-2)
H
B
(
1
-
2
)
D
A
T
A
(
B
,
2
)
acked(1)
get(2)
See Figure 10.1 for meaning of
table columns.

10.3 Using QosPolicies to Tune the Reliable Protocol
10-21
10. Reliable
10.3.4.2 How Often Piggyback Heartbeats are Sent (heartbeats_per_max_samples)
A DataWriter will automatically send heartbeats with new samples to request regular
ACKNACKs from the DataReader. These are called “piggyback” heartbeats.
If batching is disabled
1
: one piggyback heartbeat will be sent every [max_samples
2
/
heartbeats_per_max_samples] number of samples.
If batching is enabled: one piggyback heartbeat will be sent every [max_batches
3
/
heartbeats_per_max_samples] number of samples.
The heartbeats_per_max_samples field is part of the rtps_reliable_writer structure in
the DATA_WRITER_PROTOCOL QosPolicy (DDS Extension) (Section 6.5.2). If
heartbeats_per_max_samples is set equal to max_samples, this means that a heartbeat
will be sent with each sample. A value of 8 means that a heartbeat will be sent with
every 'max_samples/8' samples. Say max_samples is set to 1024, then a heartbeat will be
sent once every 128 samples. If you set this to zero, samples are sent without any piggy-
back heartbeat. The max_samples field is part of the RESOURCE_LIMITS QosPolicy
(Section 6.5.18).
Figure 10.1 on page 10-6 and Figure 10.2 on page 10-7 seem to imply that a HB is sent as
a piggyback to each DATA message. However, in situations where data is sent continu-
ously at high rates, piggybacking a HB to each message may result in too much over-
head; not so much on the HB itself, but on the ACKNACKs that would be sent back as
replies by the DataReader.
There are two reasons to send a HB:
❏ To request that a DataReader confirm the receipt of data via an ACKNACK, so
that the DataWriter can remove it from its send queue and therefore prevent the
DataWriter’s history from filling up (which could cause the write() operation to
temporarily block
4
).
❏ To inform the DataReader of what data it should have received, so that the
DataReader can send a request for missing data via an ACKNACK.
The DataWriter’s send queue can buffer many data-samples while it waits for ACK-
NACKs, and the DataReader’s receive queue can store out-of-order samples while it
waits for missing ones. So it is possible to send HB messages much less frequently than
1. Batching is enabled with the BATCH QosPolicy (DDS Extension) (Section 6.5.1).
2. max_samples is set in the RESOURCE_LIMITS QosPolicy (Section 6.5.18)
3. max_batches is set in the DATA_WRITER_RESOURCE_LIMITS QosPolicy (DDS Extension) (Section
6.5.3)
4. Note that data could also be removed from the DataWriter’s send queue if it is no longer relevant due to
some other QoS such a HISTORY KEEP_LAST (Section 6.5.8)
or LIFESPAN (Section 6.5.10).

Chapter 10
10-22
DATA messages. The ratio of piggyback HB messages to DATA messages is controlled
by the rtps_reliable_writer.heartbeats_per_max_samples field in the
DATA_WRITER_PROTOCOL QosPolicy (DDS Extension) (Section 6.5.2).
A HB is used to get confirmation from DataReaders so that the DataWriter can remove
acknowledged samples from the queue to make space for new samples. Therefore, if the
queue size is large, or new samples are added slowly, HBs can be sent less frequently.
In Figure 10.8 on page 10-23, the DataWriter sets the heartbeats_per_max_samples to
certain value so that a piggyback HB will be sent for every three samples. The
DataWriter first writes sample A and B. The DataReader receives both. However, since no
HB has been received, the DataReader won’t send back an ACKNACK. The DataWriter
will still keep all the samples in its queue. When the DataWriter sends sample C, it will
send a piggyback HB along with the sample. Once the DataReader receives the HB, it
will send back an ACKNACK for samples up to sequence number 3, such that the
DataWriter can remove all three samples from its queue. ,
10.3.4.3 Controlling Packet Size for Resent Samples (max_bytes_per_nack_response)
A repair packet is the maximum amount of data that a DataWriter will resend at a time.
For example, if the DataReader requests 20 samples, each 10K, and the
max_bytes_per_nack_response is set to 100K, the DataWriter will only send the first 10
samples. The DataReader will have to ACKNACK again to receive the next 10 samples.
A DataWriter may resend multiple missed samples in the same packet. The
max_bytes_per_nack_response field in the DATA_WRITER_PROTOCOL QosPolicy
(DDS Extension) (Section 6.5.2) limits the size of this ‘repair’ packet.
10.3.4.4 Controlling How Many Times Heartbeats are Resent (max_heartbeat_retries)
If a DataReader does not respond within max_heartbeat_retries number of heartbeats, it
will be dropped by the DataWriter and the reliable DataWriter’s Listener will be called
with a RELIABLE_READER_ACTIVITY_CHANGED Status (DDS Extension) (Section
6.3.5.8).
If the dropped DataReader becomes available again (perhaps its network connection was
down temporarily), it will be added back to the DataWriter the next time the DataWriter
receives some message (ACKNACK) from the DataReader.
When a DataReader is ‘dropped’ by a DataWriter, the DataWriter will not wait for the
DataReader to send an ACKNACK before any samples are removed. However, the
DataWriter will still send data and HBs to this DataReader as normal.
The max_heartbeat_retries field is part of the DATA_WRITER_PROTOCOL QosPolicy
(DDS Extension) (Section 6.5.2).

10.3 Using QosPolicies to Tune the Reliable Protocol
10-23
10. Reliable
Figure 10.8 Use of the heartbeats_per_max_samples
DataWriter DataReader
cache (A, 1)
cache(B,2)
cache (A,1)
time
D
A
T
A
(
A
,
1
)
1AX
write(A)
write(B)
1AX
2BX
time
1A✔
1A✔
2B✔
3C✔
cache (C,3)
check(1-3)
D
A
T
A
(
B
,
2
)
cache (B,2)
1A✔
2B✔
cache(C,3)
write(C)
1AX
2BX
3CX
D
A
T
A
(
C
,
3
)
;
H
B
(
1
-
3
)
A
C
K
N
A
C
K
(
4
)
acked(1-3)
1A✔
2B✔
3C✔
See Figure 10.1 for meaning
of table columns.

Chapter 10
10-24
10.3.4.5 Treating Non-Progressing Readers as Inactive Readers
(inactivate_nonprogressing_readers)
In addition to max_heartbeat_retries, if inactivate_nonprogressing_readers is set, then
not only are non-responsive DataReaders considered inactive, but DataReaders sending
non-progressing NACKs can also be considered inactive. A non-progressing NACK is one
which requests the same oldest sample as the previously received NACK. In this case,
the DataWriter will not consider a non-progressing NACK as coming from an active
reader, and hence will inactivate the DataReader if no new NACKs are received before
max_heartbeat_retries number of heartbeat periods has passed.
One example for which it could be useful to turn on
inactivate_nonprogressing_readers is when a DataReader’s (keep-all) queue is full of
untaken historical samples. Each subsequent heartbeat would trigger the same NACK,
and nominally the DataReader would not be inactivated. A user not requiring strict-reli-
ability could consider setting inactivate_nonprogressing_readers to allow the
DataWriter to progress rather than being held up by this non-progressing DataReader.
10.3.4.6 Coping with Redundant Requests for Missing Samples (max_nack_response_delay)
When a DataWriter receives a request for missing samples from a DataReader and
responds by resending the requested samples, it will ignore additional requests for the
same samples during the time period max_nack_response_delay.
The rtps_reliable_writer.max_nack_response_delay field is part of the
DATA_WRITER_PROTOCOL QosPolicy (DDS Extension) (Section 6.5.2).
If your send period is smaller than the round-trip delay of a message, this can cause
unnecessary sample retransmissions due to redundant ACKNACKs. In this situation,
an ACKNACK triggered by an out-of-order sample is not received before the next sam-
ple is sent. When a DataReader receives the next message, it will send another ACK-
NACK for the missing sample. As illustrated in Figure 10.9 on page 10-25, duplicate
ACKNACK messages cause another resending of missing sample “2” and lead to
wasted CPU usage on both the publication and the subscription sides.
While these redundant messages provide an extra cushion for the level of reliability
desired, you can conserve the CPU and network bandwidth usage by limiting how
often the same ACKNACK messages are sent; this is controlled by
min_nack_response_delay.

10.3 Using QosPolicies to Tune the Reliable Protocol
10-25
10. Reliable
Figure 10.9 Resending Missing Samples due to Duplicate ACKNACKs
3
1
5
2
34
34
DataWriter DataReader
Send Sample “1”
Send Sample “2”
Send Sample “3”
Send Sample “4”
Resend Sample “2”
Send Sample “5”
Resend Sample “2”
A
C
K
N
A
C
K
(
2
)
A
C
K
N
A
C
K
(
2
)
Space must be reserved
for missing sample “2”.
Samples “3” and “4”
are cached while
waiting for missing
sample “2”.
Sample “2” is dropped since it is
older than the last sample that has
been handed to the application.

Chapter 10
10-26
Reliable subscriptions are prevented from resending an ACKNACK within
min_nack_response_delay seconds from the last time an ACKNACK was sent for the
same sample. Our testing shows that the default min_nack_response_delay of 0 sec-
onds achieves an optimal balance for most applications on typical Ethernet LANs.
However, if your system has very slow computers and/or a slow network, you may
want to consider increasing min_nack_response_delay. Sending an ACKNACK and
resending a missing sample inherently takes a long time in this system. So you should
allow a longer time for recovery of the lost sample before sending another ACKNACK.
In this situation, you should increase min_nack_response_delay.
If your system consists of a fast network or computers, and the receive queue size is very
small, then you should keep min_nack_response_delay very small (such as the default
value of 0). If the queue size is small, recovering a missing sample is more important
than conserving CPU and network bandwidth (new samples that are too far ahead of
the missing sample are thrown away). A fast system can cope with a smaller
min_nack_response_delay value, and the reliable sample stream can normalize more
quickly.
10.3.4.7 Disabling Positive Acknowledgements
(disable_postive_acks_min_sample_keep_duration)
When ACKNACK storms are a primary concern in a system, an alternative to tuning
heartbeat and ACKNACK response delays is to disable positive acknowledgments
(ACKs) and rely just on NACKs to maintain reliability. Systems with non-strict reliabil-
ity requirements can disable ACKs to reduce network traffic and directly solve the prob-
lem of ACK storms. ACKs can be disabled for the DataWriter and the DataReader; when
disabled for the DataWriter, none of its DataReaders will send ACKs, whereas disabling it
at the DataReader allows per-DataReader configuration.
Normally when ACKs are enabled, strict reliability is maintained by the DataWriter,
guaranteeing that a sample stays in its send queue until all DataReaders have positively
acknowledged it (aside from relevant DURABILITY, HISTORY, and LIFESPAN QoS pol-
icies). When ACKs are disabled, strict reliability is no longer guaranteed, but the
DataWriter should still keep the sample for a sufficient duration for ACK-disabled
DataReaders to have a chance to NACK it. Thus, a configurable “keep-duration”
(disable_postive_acks_min_sample_keep_duration) applies for samples written for
ACK-disabled DataReaders, where samples are kept in the queue for at least that keep-
duration. After the keep-duration has elapsed for a sample, the sample is considered to
be “acknowledged” by its ACK-disabled DataReaders.
The keep duration should be configured for the expected worst-case from when the
sample is written to when a NACK for the sample could be received. If set too short, the

10.3 Using QosPolicies to Tune the Reliable Protocol
10-27
10. Reliable
sample may no longer be queued when a NACK requests it, which is the cost of not
enforcing strict reliability.
If the peak send rate is known and writer resources are available, the writer queue can
be sized so that writes will not block. For this case, the queue size must be greater than
the send rate multiplied by the keep duration.
10.3.5 Avoiding Message Storms with DataReaderProtocol QosPolicy
DataWriters send data samples and heartbeats to DataReaders. A DataReader responds to
a heartbeat by sending an acknowledgement that tells the DataWriter what the
DataReader has received so far and what it is missing. If there are many DataReaders, all
sending ACKNACKs to the same DataWriter at the same time, a message storm can
result. To prevent this, you can set a delay for each DataReader, so they don’t all send
ACKNACKs at the same time. This delay is set in the DATA_READER_PROTOCOL
QosPolicy (DDS Extension) (Section 7.6.1).
If you have several DataReaders per DataWriter, varying this delay for each one can
avoid ACKNACK message storms to the DataWriter. If you are not concerned about
message storms, you do not need to change this QosPolicy.
Example:
reader_qos.protocol.rtps_reliable_reader.min_heartbeat_response_delay.sec = 0;
reader_qos.protocol.rtps_reliable_reader.min_heartbeat_response_delay.nanosec =
0;
reader_qos.protocol.rtps_reliable_reader.max_heartbeat_response_delay.sec = 0;
reader_qos.protocol.rtps_reliable_reader.max_heartbeat_response_delay.nanosec =
0.5 * 1000000000UL; // 0.5 sec
As the name suggests, the minimum and maximum response delay bounds the random
wait time before the response. Setting both to zero will force immediate response, which
may be necessary for the fastest recovery in case of lost samples.
10.3.6 Resending Samples to Late-Joiners with the Durability QosPolicy
The DURABILITY QosPolicy (Section 6.5.6) is also somewhat related to Reliability. RTI
Data Distribution Service requires a finite time to "discover" or match DataReaders to
DataWriters. If an application attempts to send data before the DataReader and
DataWriter "discover" one another, then the sample will not actually get sent. Whether
or not samples are resent when the DataReader and DataWriter eventually "discover" one
another depends on how the DURABILITY and HISTORY QoS are set. The default set-
ting for the Durability QosPolicy is VOLATILE, which means that the DataWriter will
not store samples for redelivery to late-joining DataReaders.

Chapter 10
10-28
RTI Data Distribution Service also supports the TRANSIENT_LOCAL setting for the
Durability, which means that the samples will be kept stored for redelivery to late-join-
ing DataReaders, as long as the DataWriter is around and the RESOURCE_LIMITS
QosPolicy (Section 6.5.18) allows. The samples are not stored beyond the lifecycle of the
DataWriter.
See also: Waiting for Historical Data (Section 7.3.5).
10.3.7 Use Cases
This section contains advanced material that discusses practical applications of the reli-
ability related QoS.
10.3.7.1 Importance of Relative Thread Priorities
For high throughput, the RTI Data Distribution Service Event thread’s priority must be
sufficiently high on the sending application. Unlike an unreliable writer, a reliable
writer relies on internal RTI Data Distribution Service threads: the Receive thread pro-
cesses ACKNACKs from the DataReaders, and the Event thread schedules the events
necessary to maintain reliable data flow.
❏ When samples are sent to the same or another application on the same host, the
Receive thread priority should be higher than the writing thread priority (prior-
ity of the thread calling write() on the DDSDataWriter). This will allow the
Receive thread to process the messages as they are sent by the writing thread. A
sustained reliable flow requires the reader to be able to process the samples from
the writer at a speed equal to or faster than the writer emits.
❏ The default Event thread priority is low. This is adequate if your reliable transfer
is not sustained; queued up events will eventually be processed when the writ-
ing thread yields the CPU. The RTI Data Distribution Service can automatically
grow the event queue to store all pending events. But if the reliable communica-
tion is sustained, reliable events will continue to be scheduled, and the event
queue will eventually reach its limit. The default Event thread priority is unsuit-
able for maintaining a fast and sustained reliable communication and should be
increased through the participant_qos.event.thread.priority. This value maps
directly to the OS thread priority, see EVENT QosPolicy (DDS Extension) (Sec-
tion 8.5.6)).
The Event thread should also be increased to minimize the reliable latency. If
events are processed at a higher priority, dropped packets will be resent sooner.
Now we consider some practical applications of the reliability related QoS:
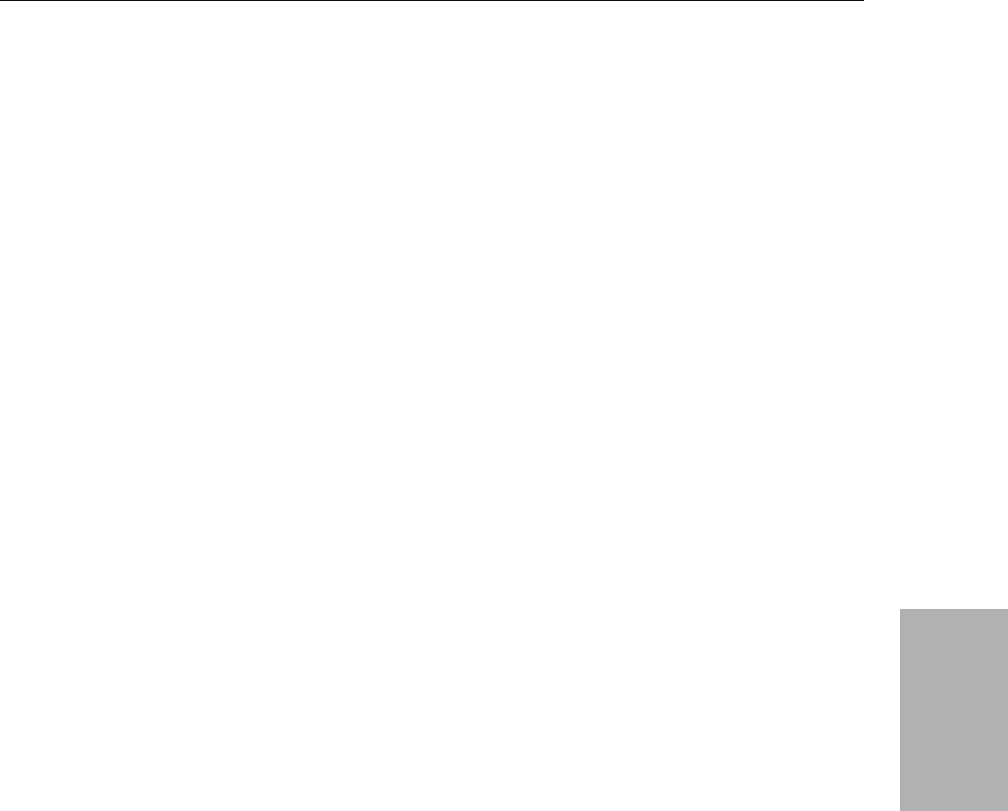
10.3 Using QosPolicies to Tune the Reliable Protocol
10-29
10. Reliable
❏ Aperiodic Use Case: One-at-a-Time (Section 10.3.7.2)
❏ Aperiodic, Bursty (Section 10.3.7.3)
❏ Periodic (Section 10.3.7.4)
10.3.7.2 Aperiodic Use Case: One-at-a-Time
Suppose you have aperiodically generated data that needs to be delivered reliably, with
minimum latency, such as a series of commands (“Ready,” “Aim,” “Fire”). If a writing
thread may block between each sample to guarantee reception of the just sent sample on
the reader’s middleware end, a smaller queue will provide a smaller upper bound on
the sample delivery time. Adequate writer QoS for this use case are presented in
Figure 10.10.
Line 1 (Figure 10.10): This is the default setting for a writer, shown here strictly for clar-
ity.
Line 2 (Figure 10.10): Setting the History kind to KEEP_ALL guarantees that no sample
is ever lost.
Line 3 (Figure 10.10): This is the default setting for a writer, shown here strictly for clar-
ity. ‘Push’ mode reliability will yield lower latency than ‘pull’ mode reliability in normal
situations where there is no sample loss. (See DATA_WRITER_PROTOCOL QosPolicy
(DDS Extension) (Section 6.5.2).) Furthermore, it does not matter that each packet sent in
response to a command will be small, because our data sent with each command is
likely to be small, so that maximizing throughput for this data is not a concern.
Line 5 - Line 10 (Figure 10.10): For this example, we assume a single writer is writing
samples one at a time. If we are not using keys (see Section 2.2.2), there is no reason to
use a queue with room for more than one sample, because we want to resolve a sample
completely before moving on to the next. While this negatively impacts throughput, it
minimizes memory usage. In this example, a written sample will remain in the queue
until it is acknowledged by all active readers (only 1 for this example).
Line 12 - Line 14 (Figure 10.10): The fastest way for a writer to ensure that a reader is up-
to-date is to force an acknowledgement with every sample. We do this by appending a
Heartbeat with every sample. This is akin to a certified mail; the writer learns—as soon
as the system will allow—whether a reader has received the letter, and can take correc-
tive action if the reader has not. As with certified mail, this model has significant over-
head compared to the unreliable case, trading off lower packet efficiency in favor of
latency and fast recovery.
Line 16-Line 17 (Figure 10.10): Since the writer takes responsibility for pushing the sam-
ples out to the reader, a writer will go into a “heightened alert” mode as soon as the high
water mark is reached (which is when any sample is written for this writer) and only

Chapter 10
10-30
come out of this mode when the low water mark is reached (when all samples have
been acknowledged for this writer). Note that the selected high and low watermarks are
actually the default values.
Line 18-Line 22 (Figure 10.10): When a reader requests a lost sample, we respond to the
reader immediately in the interest of faster recovery. If the readers receive packets on
unicast, there is no reason to wait, since the writer will eventually have to feed individ-
ual readers separately anyway. In case of multicast readers, it makes sense to consider
further. If the writer delayed its response enough so that all or most of the readers have
had a chance to NACK a sample, the writer may coalesce the requests and send just one
Figure 10.10 QoS for an Aperiodic, One-at-a-time Reliable Writer
1 qos->reliability.kind = DDS_RELIABLE_RELIABILITY_QOS;
2 qos->history.kind = DDS_KEEP_ALL_HISTORY_QOS;
3 qos->protocol.push_on_write = DDS_BOOLEAN_TRUE;
4
5 //use these hard coded value unless you use a key
6 qos->resource_limits.initial_samples = qos->resource_limits.max_samples = 1;
7 qos->resource_limits.max_samples_per_instance =
8 qos->resource_limits.max_samples;
9 qos->resource_limits.initial_instances =
10 qos->resource_limits.max_instances = 1;
11
12 // want to piggyback HB w/ every sample.
13 qos->protocol.rtps_reliable_writer.heartbeats_per_max_samples =
14 qos->resource_limits.max_samples;
15
16 qos->protocol.rtps_reliable_writer.high_watermark = 1;
17 qos->protocol.rtps_reliable_writer.low_watermark = 0;
18 qos->protocol.rtps_reliable_writer.min_nack_response_delay.sec = 0;
19 qos->protocol.rtps_reliable_writer.min_nack_response_delay.nanosec = 0;
20 //consider making non-zero for reliable multicast
21 qos->protocol.rtps_reliable_writer.max_nack_response_delay.sec = 0;
22 qos->protocol.rtps_reliable_writer.max_nack_response_delay.nanosec = 0;
23
24 // should be faster than the send rate, but be mindful of OS resolution
25 qos->protocol.rtps_reliable_writer.fast_heartbeat_period.sec = 0;
26 qos->protocol.rtps_reliable_writer.fast_heartbeat_period.nanosec =
27 alertReaderWithinThisMs * 1000000;
28
29 qos->reliability.max_blocking_time = blockingTime;
30 qos->protocol.rtps_reliable_writer.max_heartbeat_retries = 7;
31
32 // essentially turn off slow HB period
33 qos->protocol.rtps_reliable_writer.heartbeat_period.sec = 3600 * 24 * 7;

10.3 Using QosPolicies to Tune the Reliable Protocol
10-31
10. Reliable
packet to all the multicast readers. Suppose that all multicast readers do indeed NACK
within approximately 100 μsec. Setting the minimum and maximum delays at 100 μsec
will allow the writer to collect all these NACKs and send a single response over multi-
cast. (See DATA_WRITER_PROTOCOL QosPolicy (DDS Extension) (Section 6.5.2) for
information on setting min_nack_response_delay and max_nack_response_delay.)
Note that RTI Data Distribution Service relies on the OS to wait for this 100 μsec. Unfortu-
nately, not all operating systems can sleep for such a fine duration. On Windows sys-
tems, for example, the minimum achievable sleep time is somewhere between 1 to 20
milliseconds, depending on the version. On VxWorks systems, the minimum resolution
of the wait time is based on the tick resolution, which is 1/system clock rate (thus, if the
system clock rate is 100 Hz, the tick resolution is 10 millisecond). On such systems, the
achievable minimum wait is actually far larger than the desired wait time. This could
have an unintended consequence due to the delay caused by the OS; at a minimum, the
time to repair a packet may be longer than you specified.
Line 24-Line 27 (Figure 10.10): If a reader drops a sample, the writer recovers by notify-
ing the reader of what it has sent, so that the reader may request resending of the lost
sample. Therefore, the recovery time depends primarily on how quickly the writer
pings the reader that has fallen behind. If commands will not be generated faster than
one every few seconds, it may be acceptable for the writer to ping the reader several
hundred milliseconds after the sample is sent.
❏ Suppose that the round-trip time of fairly small packets between the writer and
the reader application is 50 microseconds, and that the reader does not delay
response to a Heartbeat from the writer (see DATA_READER_PROTOCOL
QosPolicy (DDS Extension) (Section 7.6.1) for how to change this). If a sample is
dropped, the writer will ping the reader after a maximum of the OS delay resolu-
tion discussed above and alertReaderWithinThisMs (let’s say 10 ms for this
example). The reader will request the missing sample immediately, and with the
code set as above, the writer will feed the missing sample immediately. Neglect-
ing the processing time on the writer or the reader end, and assuming that this
retry succeeds, the time to recover the sample from the original publication time
is: alertReaderWithinThisMs + 50 μsec + 25 μsec.
If the OS is capable of micro-sleep, the recovery time can be within 100 μsec,
barely noticeable to a human operator. If the OS minimum wait resolution is
much larger, the recovery time is dominated by the wait resolution of the OS.
Since ergonomic studies suggest that delays in excess of a 0.25 seconds start
hampering operations that require low latency data, even a 10 ms limitation
seems to be acceptable.

Chapter 10
10-32
❏ What if two packets are dropped in a row? Then the recovery time would be
2 * alertReaderWithinThisMs + 2 * 50 μsec + 25 μsec. If alertReaderWithin-
ThisMs is 100 ms, the recovery time now exceeds 200 ms, and can perhaps
degrade user experience.
Line 29-Line 30 (Figure 10.10): What if another command (like another button press) is
issued before the recovery? Since we must not drop this new sample, we block the
writer until the recovery completes. If alertReaderWithinThisMs is 10 ms, and we
assume no more than 7 consecutive drops, the longest time for recovery will be just
above (alertReaderWithinThisMs * max_heartbeat_retries), or 70 ms.
So if we set blockingTime
to about 80 ms, we will have given enough chance for recov-
ery. Of course, in a dynamic system, a reader may drop out at any time, in which case
max_heartbeat_retries
will be exceeded, and the unresponsive reader will be dropped
by the writer. In either case, the writer can continue writing. Inappropriate values will
cause a writer to prematurely drop a temporarily unresponsive (but otherwise healthy)
reader, or be stuck trying unsuccessfully to feed a crashed reader. In the unfortunate
case where a reader becomes temporarily unresponsive for a duration exceeding (aler-
tReaderWithinThisMs * max_heartbeat_retries), the writer may issue gaps to that
reader when it becomes active again; the dropped samples are irrecoverable. So estimat-
ing the worst case unresponsive time of all potential readers is critical if sample drop is
unacceptable.
Line 32-Line 33 (Figure 10.10): Since the command may not be issued for hours or even
days on end, there is no reason to keep announcing the writer’s state to the readers.
Figure 10.11 shows how to set the QoS for the reader side, followed by a line-by-line
explanation.
Figure 10.11 QoS for an Aperiodic, One-at-a-time Reliable Reader
1 qos->reliability.kind = DDS_RELIABLE_RELIABILITY_QOS;
2 qos->history.kind = DDS_KEEP_ALL_HISTORY_QOS;
3
4 // 1 is ok for normal use. 2 allows fast infinite loop
5 qos->reader_resource_limits.max_samples_per_remote_writer = 2;
6 qos->resource_limits.initial_samples = 2;
7 qos->resource_limits.initial_instances = 1;
8
9 qos->protocol.rtps_reliable_reader.max_heartbeat_response_delay.sec = 0;
10 qos->protocol.rtps_reliable_reader.max_heartbeat_response_delay.nanosec = 0;
11 qos->protocol.rtps_reliable_reader.min_heartbeat_response_delay.sec = 0;
12 qos->protocol.rtps_reliable_reader.min_heartbeat_response_delay.nanosec = 0;

10.3 Using QosPolicies to Tune the Reliable Protocol
10-33
10. Reliable
Line 1-Line 2 (Figure 10.11): Unlike a writer, the reader’s default reliability setting is
best-effort, so reliability must be turned on. Since we don’t want to drop anything, we
choose KEEP_ALL history.
Line 4-Line 6 (Figure 10.11): Since we enforce reliability on each sample, it would be suf-
ficient to keep the queue size at 1, except in the following case: suppose that the reader
takes some action in response to the command received, which in turn causes the writer
to issue another command right away. Because RTI Data Distribution Service passes the
user data up to the application even before acknowledging the sample to the writer (for
minimum latency), the first sample is still pending for acknowledgement in the writer’s
queue when the writer attempts to write the second sample, and will cause the writing
thread to block until the reader completes processing the first sample and acknowledges
it to the writer; all are as they should be. But if you want to run this infinite loop at full
throttle, the reader should buffer one more sample. Let’s follow the packets flow under
a normal circumstance:
1. The sender application writes sample 1 to the reader. The receiver application
processes it and sends a user-level response 1 to the sender application, but has
not yet ACK’d sample 1.
2. The sender application writes sample 2 to the receiving application in response
to response 1. Because the reader’s queue is 2, it can accept sample 2 even
though it may not yet have acknowledged sample 1. Otherwise, the reader may
drop sample 2, and would have to recover it later.
3. At the same time, the receiver application acknowledges sample 1, and frees up
one slot in the queue, so that it can accept sample 3, which it on its way.
The above steps can be repeated ad-infinitum in a continuous traffic.
Line 7 (Figure 10.11): Since we are not using keys, there is just one instance.
Line 9-Line 12 (Figure 10.11): We choose immediate response in the interest of fastest
recovery. In high throughput, multicast scenario, delaying the response (with event
thread priority set high of course) may decrease the likelihood of NACK storm causing
a writer to drop some NACKs. This random delay reduces this chance by staggering the
NACK response. But the minimum delay achievable once again depends on the OS.
10.3.7.3 Aperiodic, Bursty
Suppose you have aperiodically generated bursts of data, as in the case of a new aircraft
approaching an airport. The data may be the same or different, but if they are written by
a single writer, the challenge to this writer is to feed all readers as quickly and efficiently
as possible when this burst of hundreds or thousands of samples hits the system.

Chapter 10
10-34
❏ If you use an unreliable writer to push this burst of data, some of them may be
dropped over an unreliable transport such as UDP.
❏ If you try to shape the burst according to however much the slowest reader can
process, the system throughput may suffer, and places an additional burden of
queueing the samples on the sender application.
❏ If you push the data reliably as fast they are generated, this may cost dearly in
repair packets, especially to the slowest reader, which is already burdened with
application chores.
RTI Data Distribution Service pull mode reliability offers an alternative in this case by let-
ting each reader pace its own data stream. It works by notifying the reader what it is
missing, then waiting for it to request only as much as it can handle. As in the aperiodic
one-at-a-time case (Section 10.3.7.2), multicast is supported, but its performance
depends on the resolution of the minimum delay supported by the OS. At the cost of
greater latency, this model can deliver reliability while using far fewer packets than in
the push mode. The writer QoS is given in Figure 10.12, with a line-by-line explanation
below.
Line 1 (Figure 10.12): This is the default setting for a writer, shown here strictly for clar-
ity.
Line 2 (Figure 10.12): Since we do not want any data lost, we want the History kind set
to KEEP_ALL.
Line 3 (Figure 10.12): The default RTI Data Distribution Service reliable writer will push,
but we want the reader to pull instead.
Line 5-Line 11 (Figure 10.12): We assume a single instance, in which case the maximum
sample count will be the same as the maximum sample count per writer. In contrast to
the one-at-a-time case discussed in Section 10.3.7.2, the writer’s queue is large; as big as
the burst size in fact, but no more because this model tries to resolve a burst within a
reasonable period, to be computed shortly. Of course, we could block the writing thread
in the middle of the burst, but that might complicate the design of the sending applica-
tion.
Line 13-Line 14 (Figure 10.12): By a ‘piggyback’ Heartbeat, we mean only a Heartbeat
that is appended to data being pushed from the writer. Strictly speaking, the writer will
also append a Heartbeat with each reply to a reader’s lost sample request, but we call
that a ‘framing’ Heartbeat. Since data is pulled, heartbeats_per_max_samples is
ignored.
Line 16-Line 17 (Figure 10.12): Similar to the previous aperiodic writer, this writer
spends most of its time idle. But as the name suggests, even a single new sample implies
more sample to follow in a burst. Putting the writer into a fast mode quickly will allow

10.3 Using QosPolicies to Tune the Reliable Protocol
10-35
10. Reliable
readers to be notified soon. Only when all samples have been delivered, the writer can
rest.
Line 19- Line 23 (Figure 10.12): Similar to the one-at-a-time case, there is no reason to
delay response with only one reader. In this case, we can estimate the time to resolve a
burst with only a few parameters. Let’s say that the reader figures it can safely receive
and process 20 samples at a time without being overwhelmed, and that the time it takes
a writer to fetch these 20 samples and send a single packet containing these 20 samples,
plus the time it takes a reader to receive and process these sample samples, and send
another request back to the writer for the next 20 samples is 11 ms. Even on the same
hardware, if the reader’s processing time can be reduced, this time will decrease; other
Figure 10.12 QoS for an Aperiodic, Bursty Writer
1 qos->reliability.kind = DDS_RELIABLE_RELIABILITY_QOS;
2 qos->history.kind = DDS_KEEP_ALL_HISTORY_QOS;
3 qos->protocol.push_on_write = DDS_BOOLEAN_FALSE;
4
5 //use these hard coded value until you use key
6 qos->resource_limits.initial_instances =
7 qos->resource_limits.max_instances = 1;
8 qos->resource_limits.initial_samples = qos->resource_limits.max_samples
9 = worstBurstInSample;
10 qos->resource_limits.max_samples_per_instance =
11 qos->resource_limits.max_samples;
12
13 // piggyback HB not used
14 qos->protocol.rtps_reliable_writer.heartbeats_per_max_samples = 0;
15
16 qos->protocol.rtps_reliable_writer.high_watermark = 1;
17 qos->protocol.rtps_reliable_writer.low_watermark = 0;
18
19 qos->protocol.rtps_reliable_writer.min_nack_response_delay.sec = 0;
20 qos->protocol.rtps_reliable_writer.min_nack_response_delay.nanosec = 0;
21 qos->protocol.rtps_reliable_writer.max_nack_response_delay.sec = 0;
22 qos->protocol.rtps_reliable_writer.max_nack_response_delay.nanosec = 0;
23 qos->reliability.max_blocking_time = blockingTime;
24
25 // should be faster than the send rate, but be mindful of OS resolution
26 qos->protocol.rtps_reliable_writer.fast_heartbeat_period.sec = 0;
27 qos->protocol.rtps_reliable_writer.fast_heartbeat_period.nanosec =
28 alertReaderWithinThisMs * 1000000;
29 qos->protocol.rtps_reliable_writer.max_heartbeat_retries = 5;
30
31 // essentially turn off slow HB period
32 qos->protocol.rtps_reliable_writer.heartbeat_period.sec = 3600 * 24 * 7;

Chapter 10
10-36
factors such as the traversal time through RTI Data Distribution Service and the transport
are typically in microseconds range (depending on machines of course).
For example, let’s also say that the worst case burst is 1000 samples. The writing thread
will of course not block because it is merely copying each of the 1000 samples to the RTI
Data Distribution Service queue on the writer side; on a typical modern machine, the act
of writing these 1000 samples will probably take no more than a few ms. But it would
take at least 1000/20 = 50 resend packets for the reader to catch up to the writer, or 50
times 11 ms = 550 ms. Since the burst model deals with one burst at a time, we would
expect that another burst would not come within this time, and that we are allowed to
block for at least this period. Including a safety margin, it would appear that we can
comfortably handle a burst of 1000 every second or so.
But what if there are multiple readers? The writer would then take more time to feed
multiple readers, but with a fast transport, a few more readers may only increase the 11
ms to only 12 ms or so. Eventually, however, the number of readers will justify the use of
multicast. Even in pull mode, RTI Data Distribution Service supports multicast by mea-
suring how many multicast readers have requested sample repair. If the writer does not
delay response to NACK, then repairs will be sent in unicast. But a suitable NACK
delay allows the writer to collect potentially NACKs from multiple readers, and feed a
single multicast packet. But as discussed in Section 10.3.7.2, by delaying reply to
coalesce response, we may end up waiting much longer than desired. On a Windows
system with 10 ms minimum sleep achievable, the delay would add at least 10 ms to the
11 ms delay, so that the time to push 1000 samples now increases to 50 times 21 ms =
1.05 seconds. It would appear that we will not be able to keep up with incoming burst if
it came at roughly 1 second, although we put fewer packets on the wire by taking
advantage of multicast.
Line 25-Line 28 (Figure 10.12): We now understand how the writer feeds the reader in
response to the NACKs. But how does the reader realize that it is behind? The writer
notifies the reader with a Heartbeat to kick-start the exchange. Therefore, the latency
will be lower bound by the writer’s fast heartbeat period. If the application is not partic-
ularly sensitive to latency, the minimum wait time supported by the OS (10 ms on Win-
dows systems, for example) might be a reasonable value.
Line 29 (Figure 10.12): With a fast heartbeat period of 50 ms, a writer will take 500 ms (50
ms times the default max_heartbeat_retries
of 10) to write-off an unresponsive reader.
If a reader crashes while we are writing a lot of samples per second, the writer queue
may completely fill up before the writer has a chance to drop the crashed reader. Lower-
ing max_heartbeat_retries
will prevent that scenario.
Line 31-Line 32 (Figure 10.12): For an aperiodic writer, turning off slow periodic Heart-
beats will remove unwanted traffic from the network.

10.3 Using QosPolicies to Tune the Reliable Protocol
10-37
10. Reliable
Figure 10.13 shows example code for a corresponding aperiodic, bursty reader.
Line 1-Line 2 (Figure 10.13): Unlike a writer, the reader’s default reliability setting is
best-effort, so reliability must be turned on. Since we don’t want to drop anything, we
choose KEEP_ALL for the History QoS kind.
Line 3-Line 5 (Figure 10.13): Unlike the writer, the reader’s queue can be kept small,
since the reader is free to send ACKs for as much as it wants anyway. In general, the
larger the queue, the larger the packet needs to be, and the higher the throughput will
be. When the reader NACKs for lost sample, it will only ask for this much.
Line 7-Line 11 (Figure 10.13): We do not use keys in this example.
Line 13-Line 17 (Figure 10.13): We respond immediately to catch up as soon as possible.
When there are many readers, this may cause a NACK storm, as discussed in the reader
code for one-at-a-time reliable reader.
10.3.7.4 Periodic
In a periodic reliable model, we can use the writer and the reader queue to keep the data
flowing at a smooth rate. The data flows from the sending application to the writer
queue, then to the transport, then to the reader queue, and finally to the receiving appli-
cation. Unless the sending application or any one of the receiving applications becomes
unresponsive (including a crash) for a noticeable duration, this flow should continue
uninterrupted.
Figure 10.13 QoS for an Aperiodic, Bursty Reader
1 qos->reliability.kind = DDS_RELIABLE_RELIABILITY_QOS;
2 qos->history.kind = DDS_KEEP_ALL_HISTORY_QOS;
3 qos->resource_limits.initial_samples =
4 qos->resource_limits.max_samples =
5 qos->reader_resource_limits.max_samples_per_remote_writer = 32;
6
7 //use these hard coded value until you use key
8 qos->resource_limits.max_samples_per_instance =
9 qos->resource_limits.max_samples;
10 qos->resource_limits.initial_instances =
11 qos->resource_limits.max_instances = 1;
12
13 // the writer probably has more for the reader; ask right away
14 qos->protocol.rtps_reliable_reader.min_heartbeat_response_delay.sec = 0;
15 qos->protocol.rtps_reliable_reader.min_heartbeat_response_delay.nanosec = 0;
16 qos->protocol.rtps_reliable_reader.max_heartbeat_response_delay.sec = 0;
17 qos->protocol.rtps_reliable_reader.max_heartbeat_response_delay.nanosec = 0;

Chapter 10
10-38
The latency will be low in most cases, but will be several times higher for the recovered
and many subsequent samples. In the event of a disruption (e.g., loss in transport, or
one of the readers becoming temporarily unresponsive), the writer’s queue level will
rise, and may even block in the worst case. If the writing thread must not block, the
writer’s queue must be sized sufficiently large to deal with any fluctuation in the sys-
tem. Figure 10.14 shows an example, with line-by-line analysis below.
Figure 10.14 QoS for a Periodic Reliable Writer
1 qos->reliability.kind = DDS_RELIABLE_RELIABILITY_QOS;
2 qos->history.kind = DDS_KEEP_ALL_HISTORY_QOS;
3 qos->protocol.push_on_write = DDS_BOOLEAN_TRUE;
4
5 //use these hard coded value until you use key
6 qos->resource_limits.initial_instances =
7 qos->resource_limits.max_instances = 1;
8
9 int unresolvedSamplePerRemoteWriterMax =
10 worstCaseApplicationDelayTimeInMs * dataRateInHz / 1000;
11 qos->resource_limits.max_samples = unresolvedSamplePerRemoteWriterMax;
12 qos->resource_limits.initial_samples = qos->resource_limits.max_samples/2;
13 qos->resource_limits.max_samples_per_instance =
14 qos->resource_limits.max_samples;
15
16 int piggybackEvery = 8;
17 qos->protocol.rtps_reliable_writer.heartbeats_per_max_samples =
18 qos->resource_limits.max_samples / piggybackEvery;
19
20 qos->protocol.rtps_reliable_writer.high_watermark = piggybackEvery * 4;
21 qos->protocol.rtps_reliable_writer.low_watermark = piggybackEvery * 2;
22 qos->reliability.max_blocking_time = blockingTime;
23
24 qos->protocol.rtps_reliable_writer.min_nack_response_delay.sec = 0;
25 qos->protocol.rtps_reliable_writer.min_nack_response_delay.nanosec = 0;
26
27 qos->protocol.rtps_reliable_writer.max_nack_response_delay.sec = 0;
28 qos->protocol.rtps_reliable_writer.max_nack_response_delay.nanosec = 0;
29
30 qos->protocol.rtps_reliable_writer.fast_heartbeat_period.sec = 0;
31 qos->protocol.rtps_reliable_writer.fast_heartbeat_period.nanosec =
32 alertReaderWithinThisMs * 1000000;
33 qos->protocol.rtps_reliable_writer.max_heartbeat_retries = 7;
34
35 // essentially turn off slow HB period
36 qos->protocol.rtps_reliable_writer.heartbeat_period.sec = 3600 * 24 * 7;

10.3 Using QosPolicies to Tune the Reliable Protocol
10-39
10. Reliable
Line 1 (Figure 10.14): This is the default setting for a writer, shown here strictly for clar-
ity.
Line 2 (Figure 10.14): Since we do not want any data lost, we set the History kind to
KEEP_ALL.
Line 3 (Figure 10.14): This is the default setting for a writer, shown here strictly for clar-
ity. Pushing will yield lower latency than pulling.
Line 5-Line 7 (Figure 10.14): We do not use keys in this example, so there is only one
instance.
Line 9-Line 11 (Figure 10.14): Though a simplistic model of queue, this is consistent with
the idea that the queue size should be proportional to the data rate and the wort case jit-
ter in communication.
Line 12 (Figure 10.14): Even though we have sized the queue according to the worst
case, there is a possibility for saving some memory in the normal case. Here, we initially
size the queue to be only half of the worst case, hoping that the worst case will not
occur. When it does, RTI Data Distribution Service will keep increasing the queue size as
necessary to accommodate new samples, until the maximum is reached. So when our
optimistic initial queue size is breached, we will incur the penalty of dynamic memory
allocation. Furthermore, you will wind up using more memory, as the initially allocated
memory will be orphaned (note: does not mean a memory leak or dangling pointer); if
the initial queue size is M_i and the maximal queue size is M_m, where M_m = M_i *
2^n, the memory wasted in the worst case will be (M_m - 1) * sizeof(sample) bytes. Note
that the memory allocation can be avoided by setting the initial queue size equal to its
max value.
Line 13-Line 14 (Figure 10.14): If there is only one instance, maximum samples per
instance is the same as maximum samples allowed.
Line 16-Line 18 (Figure 10.14): Since we are pushing out the data at a potentially rapid
rate, the piggyback heartbeat will be useful in letting the reader know about any miss-
ing samples. The piggybackEvery can be increased if the writer is writing at a fast rate,
with the cost that more samples will need to queue up for possible resend. That is, you
can consider the piggyback heartbeat to be taking over one of the roles of the periodic
heartbeat in the case of a push. So sending fewer samples between piggyback heartbeats
is akin to decreasing the fast heartbeat period seen in previous sections. Please note that
we cannot express piggybackEvery directly as its own QoS, but indirectly through the
maximum samples.
Line 20-Line 22 (Figure 10.14): If piggybackEvery was exactly identical to the fast heart-
beat, there would be no need for fast heartbeat or the high watermark. But one of the
important roles for the fast heartbeat period is to allow a writer to abandon inactive
readers before the queue fills. If the high watermark is set equal to the queue size, the

Chapter 10
10-40
writer would not doubt the status of an unresponsive reader until the queue completely
fills—blocking on the next write (up to blockingTime). By lowering the high water-
mark, you can control how vigilant a writer is about checking the status of unresponsive
readers. By scaling the high watermark to piggybackEvery
, the writer is expressing
confidence that an alive reader will respond promptly within the time it would take a
writer to send 4 times piggybackEvery samples. If the reader does not delay the
response too long, this would be a good assumption. Even if the writer estimated on the
low side and does go into fast mode (suspecting that the reader has crashed) when a
reader is temporarily unresponsive (e.g., when it is performing heavy computation for a
few milliseconds), a response from the reader in question will resolve any doubt, and
data delivery can continue uninterrupted. As the reader catches up to the writer and the
queue level falls below the low watermark, the writer will pop out to the normal,
relaxed mode.
Line 24-Line 28 (Figure 10.14): When a reader is behind (including a reader whose Dura-
bility QoS is non-VOLATILE and therefore needs to catch up to the writer as soon as it is
created), how quickly the writer responds to the reader’s request will determine the
catch-up rate. While a multicast writer (that is, a writer with multicast readers) may con-
sider delaying for some time to take advantage of coalesced multicast packets. Keep in
mind the OS delay resolution issue discussed in the previous section.
Line 30-Line 33 (Figure 10.14): The fast heartbeat mechanism allows a writer to detect a
crashed reader and move along with the remaining readers when a reader does not
respond to any of the max_heartbeat_retries
number of heartbeats sent at the
fast_heartbeat_period
rate. So if you want a more cautious writer, decrease either num-
bers; conversely, increasing either number will result in a writer that is more reluctant to
write-off an unresponsive reader.
Line 35-Line 36 (Figure 10.14): Since this a periodic model, a separate periodic heartbeat
to notify the writer’s status would seem unwarranted; the piggyback heartbeat sent
with samples takes over that role.

10.3 Using QosPolicies to Tune the Reliable Protocol
10-41
10. Reliable
Figure 10.15 shows how to set the QoS for a matching reader, followed by a line-by-line
explanation.
Line 1-Line 2 (Figure 10.15): Unlike a writer, the reader’s default reliability setting is
best-effort, so reliability must be turned on. Since we don’t want to drop anything, we
choose KEEP_ALL for the History QoS.
Line 3-Line 6 (Figure 10.15) Unlike the writer, the reader queue is sized not according to
the jitter of the reader, but rather how many samples you want to cache speculatively in
case of a gap in sequence of samples that the reader must recover. Remember that a
reader will stop giving a sequence of samples as soon as an unintended gap appears,
because the definition of strict reliability includes in-order delivery. If the queue size
were 1, the reader would have no choice but to drop all subsequent samples received
until the one being sought is recovered. RTI Data Distribution Service uses speculative
caching, which minimizes the disruption caused by a few dropped samples. Even for
the same duration of disruption, the demand on reader queue size is greater if the writer
will send more rapidly. In sizing the reader queue, we consider 2 factors that comprise
the lost sample recovery time:
❏ How long it takes a reader to request a resend to the writer.
The piggyback heartbeat tells a reader about the writer’s state. If only samples
between two piggybacked samples are dropped, the reader must cache piggy-
backEvery samples before asking the writer for resend. But if a piggybacked
sample is also lost, the reader will not get around to asking the writer until the
Figure 10.15 QoS for a Periodic Reliable Reader
1 qos->reliability.kind = DDS_RELIABLE_RELIABILITY_QOS;
2 qos->history.kind = DDS_KEEP_ALL_HISTORY_QOS;
3 qos->resource_limits.initial_samples =
4 qos->resource_limits.max_samples =
5 qos->reader_resource_limits.max_samples_per_remote_writer =
6 ((2*piggybackEvery - 1) + dataRateInHz * delayInMs / 1000);
7
8 //use these hard coded value until you use key
9 qos->resource_limits.max_samples_per_instance =
10 qos->resource_limits.max_samples;
11 qos->resource_limits.initial_instances =
12 qos->resource_limits.max_instances = 1;
13
14 qos->protocol.rtps_reliable_reader.min_heartbeat_response_delay.sec = 0;
15 qos->protocol.rtps_reliable_reader.min_heartbeat_response_delay.nanosec = 0;
16 qos->protocol.rtps_reliable_reader.max_heartbeat_response_delay.sec = 0;
17 qos->protocol.rtps_reliable_reader.max_heartbeat_response_delay.nanosec = 0;

Chapter 10
10-42
next piggybacked sample is received. Note that in this worst case calculation, we
are ignoring stand-alone heartbeats (i.e., not piggybacked heartbeat from the
writer). Of course, the reader may drop any number of heartbeats, including the
stand-alone heartbeat; in this sense, there is no such thing as the absolute worst
case—just reasonable worst case, where the probability of consecutive drops is
acceptably low. For the majority of applications, even two consecutive drops is
unlikely, in which case we need to cache at most
(2*piggybackEvery - 1) sam-
ples before the reader will ask the writer to resend, assuming no delay (Line 14-
Line 17).
❏ How long it takes for the writer to respond to the request.
Even ignoring the flight time of the resend request through the transport, the
writer takes a finite time to respond to the repair request--mostly if the writer
delays reply for multicast readers. In case of immediate response, the processing
time on the writer end, as well as the flight time of the messages to and from the
writer do not matter unless very larger data rate; that is, it is the product term
that matters. In case the delay for multicast is random (that is, the minimum and
the maximum delay are not equal), one would have to use the maximum delay
to be conservative.
Line 8-Line 12 (Figure 10.15): Since we are not using keys, there is just one instance.
Line 14-Line 17 (Figure 10.15): If we are not using multicast, or the number of readers
being fed by the writer, there is no reason to delay.

11-1
11. Durability and
Persistence
Chapter 11 Mechanisms for Achieving Information
Durability and Persistence
11.1 Introduction
RTI Data Distribution Service offers the following mechanisms for achieving durability
and persistence:
❏ Durable Writer History This feature allows a DataWriter to persist its historical
cache, perhaps locally, so that it can survive shutdowns, crashes and restarts.
When an application restarts, each DataWriter that has been configured to have
durable writer history automatically loads all of the data in this cache from disk
and can carry on sending data as if it had never stopped executing. To the rest of
the system, it will appear as if the DataWriter had been temporarily disconnected
from the network and then reappeared.
❏ Durable Reader State This feature allows a DataReader to persist its state and
remember which data it has already received. When an application restarts, each
DataReader that has been configured to have durable reader state automatically
loads its state from disk and can carry on receiving data as if it had never
stopped executing. Data that had already been received by the DataReader before
the restart will be suppressed so that it is not even sent over the network.
❏ Data Durability This feature is a full implementation of the OMG DDS Persis-
tence Profile. The DURABILITY QosPolicy (Section 6.5.6) allows an application
to configure a DataWriter so that the information written by the DataWriter sur-
vives beyond the lifetime of the DataWriter. In this manner, a late-joining
DataReader can subscribe to and receive the information even after the DataWriter

Chapter 11
11-2
application is no longer executing. To use this feature, you need RTI Persistence
Service, a separate application described in Chapter 21: Introduction to RTI Per-
sistence Service.
These features can be configured separately or in combination. To use Durable Writer
State and Durable Reader State, you need a relational database, which is not included
with RTI Data Distribution Service. Supported databases are listed in the Release Notes.
RTI Persistence Service does not require a database when used in TRANSIENT mode (see
Section 11.5.1) or in PERSISTENT mode with file-system storage (see Section 11.5.1 and
Section 22.5).
To understand how these features interact we will examine the behavior of the system
using the following scenarios:
❏ Scenario 1. A DataReader Joins after a DataWriter Restarts (Durable Writer His-
tory) (Section 11.1.1)
❏ Scenario 2: A DataReader Restarts While DataWriter Stays Up (Durable Reader
State) (Section 11.1.2)
❏ Scenario 3. A DataReader Joins after the DataWriter Leaves the Domain (Durable
Data) (Section 11.1.3)
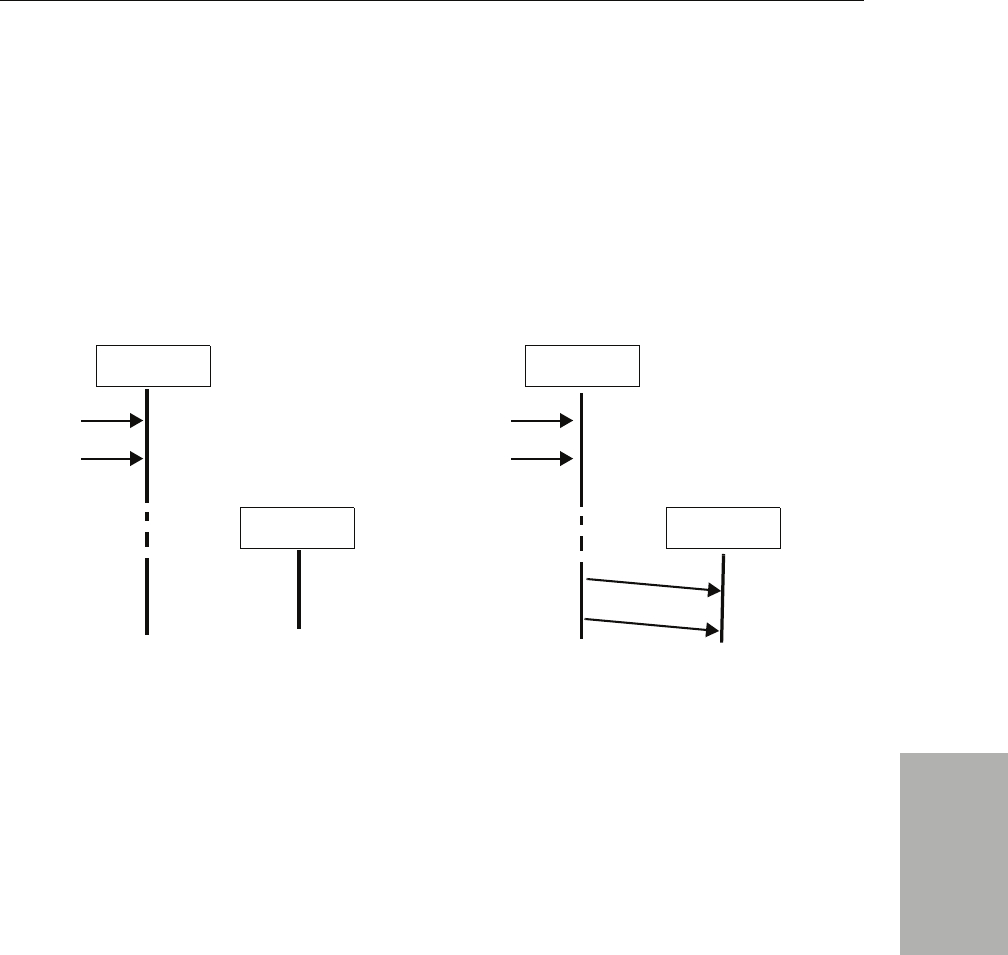
11.1 Introduction
11-3
11. Durability and
Persistence
11.1.1 Scenario 1. A DataReader Joins after a DataWriter Restarts (Durable Writer
History)
In this scenario, a DomainParticipant joins the domain, creates a DataWriter and writes
some data, then the DataWriter shuts down (gracefully or due to a fault). The DataWriter
restarts and a DataReader joins the domain. Depending on whether the DataWriter is
configured with durable history, the late-joining DataReader may or may not receive the
data published already by the DataWriter before it restarted. This is illustrated in
Figure 11.1. For more information, see Durable Writer History (Section 11.3)
Figure 11.1 Durable Writer History
Without Durable Writer History:
the late-joining DataReader will not
receive data (a and b) that was published
before the DataWriter’s restart.
DataWriter
DataReader
a
b
With Durable Writer History:
the restarted DataWriter will recover
its history and deliver its data to the
late-joining DataReader
DataWriter
a
b
a
b
DataReader
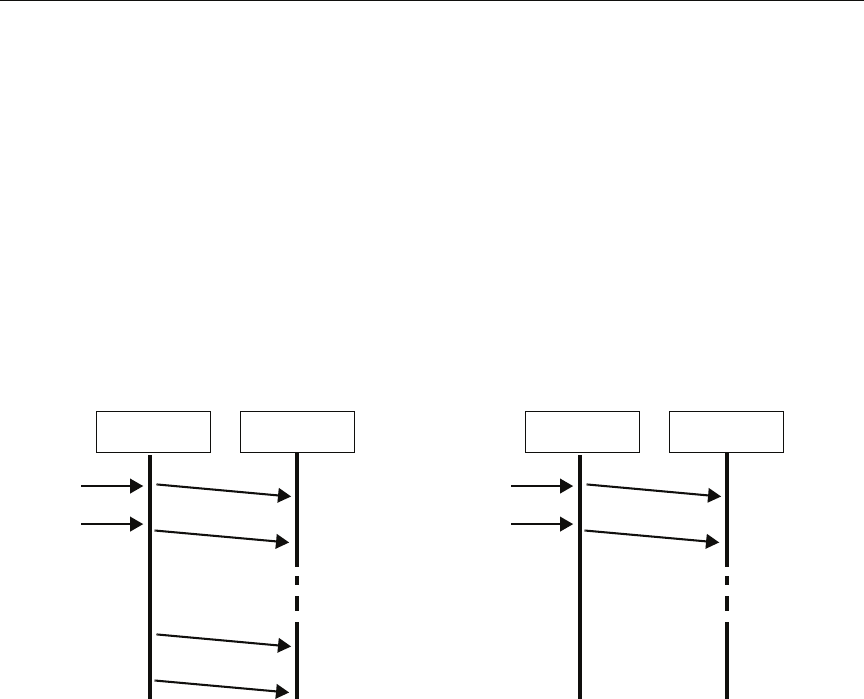
Chapter 11
11-4
11.1.2 Scenario 2: A DataReader Restarts While DataWriter Stays Up (Durable
Reader State)
In this scenario, two DomainParticipants join a domain; one creates a DataWriter and the
other a DataReader on the same Topic. The DataWriter publishes some data ("a" and "b")
that is received by the DataReader. After this, the DataReader shuts down (gracefully or
due to a fault) and then restarts—all while the DataWriter remains present in the
domain.
Depending on whether the DataReader is configured with Durable Reader State, the
DataReader may or may not receive a duplicate copy of the data it received before it
restarted. This is illustrated in Figure 11.2. For more information, see Durable Reader
State (Section 11.4).
11.1.3 Scenario 3. A DataReader Joins after the DataWriter Leaves the Domain
(Durable Data)
In this scenario, a DomainParticipant joins a domain, creates a DataWriter, publishes
some data on a Topic and then shuts down (gracefully or due to a fault). Later, a
Figure 11.2 Durable Reader State
Without Durable Reader State:
the DataReader will receive the
data that was already received
before the restart.
DataWriter DataReader
a
b
a
b
a
b
With Durable Reader State:
the DataReader remembers that it
already received the data and
does not request it again.
DataWriter DataReader
a
b
a
b

11.1 Introduction
11-5
11. Durability and
Persistence
DataReader joins the domain and subscribes to the data. RTI Persistence Service is run-
ning.
Depending on whether Durable Data is enabled for the Topic, the DataReader may or
may not receive the data previous published by the DataWriter. This is illustrated in
Figure 11.3. For more information, see Data Durability (Section 11.5)
This third scenario is similar to Scenario 1. A DataReader Joins after a DataWriter
Restarts (Durable Writer History) (Section 11.1.1) except that in this case the DataWriter
does not need to restart for the DataReader to get the data previously written by the
DataWriter. This is because RTI Persistence Service acts as an intermediary that stores the
data so it can be given to late-joining DataReaders.
Figure 11.3 Durable Data
Without Durable Data:
the late-joining DataReader will
not receive data (a and b) that
was published before the
DataWriter quit.
DataWriter
DataReader
a
b
With Durable Data:
RTI Persistence Service remembers
what data was published and
delivers it to the late-joining
DataReader.
DataWriter
a
b
a
b
DataReader
RTI Persistence
Service
a
b

Chapter 11
11-6
11.2 Durability and Persistence Based on Virtual GUIDs
Every modification to the global dataspace made by a DataWriter is identified by a pair
(virtual GUID, sequence number).
❏ The virtual GUID (Global Unique Identifier) is a 16-byte character identifier
associated with a DataWriter or DataReader; it is used to uniquely identify this
entity in the global data space.
❏ The sequence number is a 64-bit identifier that identifies changes published by a
specific DataWriter.
Several DataWriters can be configured with the same virtual GUID. If each of these
DataWriters publishes a sample with sequence number '0', the sample will only be
received once by the DataReaders subscribing to the content published by the DataWrit-
ers (see Figure 11.4).
Additionally, RTI Data Distribution Service uses the virtual GUID to associate a persisted
state (state in permanent storage) to the corresponding DDS entity.
For example, the history of a DataWriter will be persisted in a database table with a
name generated from the virtual GUID of the DataWriter. If the DataWriter is restarted, it
must have associated the same virtual GUID to restore its previous history.
Figure 11.4 Global Dataspace Changes
DataWriter
(vg: 1)
DataReader
(vg: 1)
DataWriter
(vg: 1)
DataWriter
(vg: 2)
(vg: 1, sn: 0)
(vg: 2, sn: 0)
(vg: 1, sn: 0)
(vg: 2, sn: 0)
(vg: 2, sn: 0)
(vg: 1, sn: 0)
(vg: 1, sn: 0)
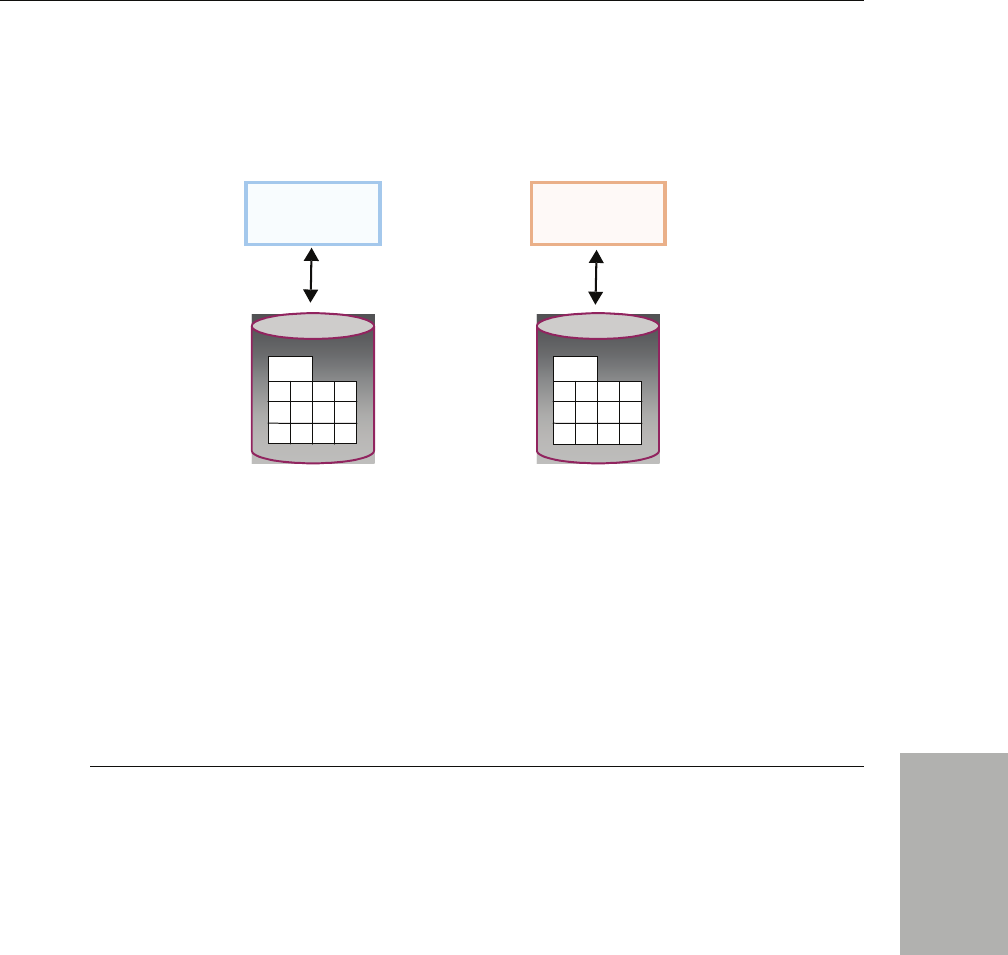
11.3 Durable Writer History
11-7
11. Durability and
Persistence
Likewise, the state of a DataReader will be persisted in a database table whose name is
generated from the DataReader virtual GUID (see Figure 11.5).
A DataWriter’s virtual GUID can be configured using the member virtual_guid in the
DATA_WRITER_PROTOCOL QosPolicy (DDS Extension) (Section 6.5.2).
A DataReader’s virtual GUID can be configured using the member virtual_guid in the
DATA_READER_PROTOCOL QosPolicy (DDS Extension) (Section 7.6.1).
The DDS_PublicationBuiltinTopicData and DDS_SubscriptionBuiltinTopicData struc-
tures include the virtual GUID associated with the discovered publication or subscrip-
tion (see Built-in DataReaders (Section 14.2)).
11.3 Durable Writer History
The DURABILITY QosPolicy (Section 6.5.6) controls whether or not, and how, pub-
lished samples are stored by the DataWriter application for DataReaders that are found
after the samples were initially written. The samples stored by the DataWriter constitute
the DataWriter’s history.
RTI Data Distribution Service provides the capability to make the DataWriter history
durable, by persisting its content in a relational database. This makes it possible for the
history to be restored when the DataWriter restarts. See the Release Notes for the list of
supported relational databases.
Figure 11.5 History/State Persistence Based on the Virtual GUID
DataWriter
(vg: 1)
DataReader
(vg: 1)
vg: 1
vg: 1

Chapter 11
11-8
The association between the history stored in the database and the DataWriter is done
using the virtual GUID.
11.3.1 Durable Writer History Use Case
The following use case describes the durable writer history functionality:
1. A DataReader receives two samples with sequence number 1 and 2 published by
a DataWriter with virtual GUID 1.
2. The process running the DataWriter is stopped and a new late-joining DataReader
is created.
The new DataReader with virtual GUID 2 does not receive samples 1 and 2
because the original DataWriter has been destroyed. If the samples must be avail-
able to late-joining DataReaders after the DataWriter deletion, you can use RTI
Persistence Service, described in Chapter 21: Introduction to RTI Persistence Ser-
vice.
3. The DataWriter is restarted using the same virtual GUID.
DataWriter
(vg: 1)
DataReader
(vg: 1)
1, 2
1, 2
1, 2
DataReader
(vg: 1)
DataReader
(vg: 2)
DataWriter
(vg: 1)
DataReader
(vg: 1)
1, 2
1, 2
DataReader
(vg: 2)

11.3 Durable Writer History
11-9
11. Durability and
Persistence
After being restarted, the DataWriter restores its history. The late-joining
DataReader will receive samples 1 and 2 because they were not received previ-
ously. The DataReader with virtual GUID 1 will not receive samples 1 and 2
because it already received them
4. The DataWriter publishes two new samples.
The two new samples with sequence numbers 3 and 4 will be received by both
DataReaders.
11.3.2 How To Configure Durable Writer History
RTI Data Distribution Service allows a DataWriter’s history to be stored in a relational
database that provides an ODBC driver.
For each DataWriter history that is configured to be durable, RTI Data Distribution Service
will create a maximum of two tables:
❏ The first table is used to store the samples associated with the writer history. The
name of that table is WS<32 uuencoding of the writer virtual GUID>.
❏ The second table is only created for keyed-topic and it is used to store the
instances associated with the writer history. The name of the second table is
WI<32 uuencoding of the writer virtual GUID>.
To configure durable writer history, use the PROPERTY QosPolicy (DDS Extension)
(Section 6.5.15) associated with DataWriters and DomainParticipants.
A ‘durable writer history’ property defined in the DomainParticipant will be applicable
to all the DataWriters belonging to the DomainParticipant unless it is overwritten by the
DataWriter. Table 11.1 lists the supported ‘durable writer history’ properties.
Note: Durable Writer History is not supported for Multi-channel DataWriters (see
Chapter 16) or when Batching is enabled (see Section 6.5.1); an error is reported if this
type of DataWriter tries to configure Durable Writer History.
See also: Durable Reader State (Section 11.4).
DataWriter
(vg: 1)
DataReader
(vg: 1)
3, 4
3, 4
DataReader
(vg: 2)
3, 4
3, 4

Chapter 11
11-10
Table 11.1 Durable Writer History Properties
Property Description
dds.data_writer.history.plugin_name
Required.
Must be set to "dds.data_writer.history.odbc_plugin.builtin" to enable
durable writer history in the DataWriter.
dds.data_writer.history.odbc_plugin.
dsn
Required.
The ODBC DSN (Data Source Name) associated with the database
where the writer history must be persisted.
dds.data_writer.history.odbc_plugin.
driver
This property tells RTI Data Distribution Service which ODBC driver to
load. If the property is not specified, RTI Data Distribution Service will
try to use the standard ODBC driver manager library (UnixOdbc on
UNIX/Linux systems, the Windows ODBC driver manager on Win-
dows systems).
When using Durable Writer History and Oracle TimesTen on a Win-
dows system: You must link directly with the TimesTen driver, not
with the Windows ODBC Driver Manager. To do so, you must set
dds.data_writer.history.odbc_plugin.driver to ttdv60.dll (this is not
the default).
dds.data_writer.history.odbc_plugin.
username
Configures the username/password used to connect to the database.
Default: No password or username
dds.data_writer.history.odbc_plugin.
password
dds.data_writer.history.odbc_plugin.
shared
When set to 1, RTI Data Distribution Service will create a single connec-
tion per DSN that will be shared across DataWriters within the same
Publisher.
A DataWriter can be configured to create its own database connection
by setting this property to 0 (the default).

11.3 Durable Writer History
11-11
11. Durability and
Persistence
dds.data_writer.history.odbc_plugin.
instance_cache_max_size
These properties configure the resource limits associated with the
ODBC writer history caches.
To minimize the number of accesses to the database, RTI Data Distribu-
tion Service uses two caches, one for samples and one for instances. The
initial size and the maximum size of these caches are configured using
these properties.
The resource limits, initial_instances, max_instances, initial_samples,
max_samples, and max_samples_per_instance defined in
RESOURCE_LIMITS QosPolicy (Section 6.5.18) are used to configure
the maximum number of samples and instances that can be stored in
the relational database.
Defaults:
❏ instance_cache_max_size: max_instances in
RESOURCE_LIMITS QosPolicy (Section 6.5.18)
❏ instance_cache_init_size: initial_instances in
RESOURCE_LIMITS QosPolicy (Section 6.5.18)
❏ sample_cache_max_size: 32
❏ sample_cache_init_size: 32
Note: If the property in_memory_state (see below in this table) is 1,
then instance_cache_max_size is always equal to max_instances in
RESOURCE_LIMITS QosPolicy (Section 6.5.18)—it cannot be changed.
dds.data_writer.history.odbc_plugin.
instance_cache_init_size
dds.data_writer.history.odbc_plugin.
sample_cache_max_size
dds.data_writer.history.odbc_plugin.
sample_cache_init_size
dds.data_writer.history.odbc_plugin.
restore
This property indicates whether or not the persisted writer history
must be restored once the DataWriter is restarted.
If this property is 0, the content of the database associated with the
DataWriter being restarted will be deleted.
If it is 1, the DataWriter will restore its previous state from the database
content.
Default: 1
Table 11.1 Durable Writer History Properties
Property Description

Chapter 11
11-12
Example C++ Code
/* Get default QoS */
...
retcode = DDSPropertyQosPolicyHelper::add_property(
writerQos.property,
"dds.data_writer.history.plugin_name",
"dds.data_writer.history.odbc_plugin.builtin",
DDS_BOOLEAN_FALSE);
if (retcode != DDS_RETCODE_OK) {
/* Report error */
}
retcode = DDSPropertyQosPolicyHelper::add_property(
writerQos.property,
"dds.data_writer.history.odbc_plugin.dsn",
"<user DSN>",
DDS_BOOLEAN_FALSE);
retcode = DDSPropertyQosPolicyHelper::add_property(
writerQos.property,
"dds.data_writer.history.odbc_plugin.driver",
"<ODBC library>",
DDS_BOOLEAN_FALSE);
if (retcode != DDS_RETCODE_OK) {
dds.data_writer.history.odbc_plugin.
in_memory_state
This property determines how much state will be kept in memory by
the ODBC writer history in order to avoid accessing the database.
If this property is 1, then the property instance_cache_max_size (see
above in this table) is always equal to max_instances in
RESOURCE_LIMITS QosPolicy (Section 6.5.18)—it cannot be changed.
In addition, the ODBC writer history will keep in memory a fixed state
overhead of 24 bytes per sample. This mode provides the best ODBC
writer history performance. However, the restore operation will be
slower and the maximum number of samples that the writer history
can manage is limited by the available physical memory.
If it is 0, all the state will be kept in the underlying database. In this
mode, the maximum number of samples in the writer history is not
limited by the physical memory available unless the underlying data-
base is an in-memory database (TimesTen).
Default: 1
Table 11.1 Durable Writer History Properties
Property Description

11.4 Durable Reader State
11-13
11. Durability and
Persistence
/* Report error */
}
retcode = DDSPropertyQosPolicyHelper::add_property (
writerQos.property,
"dds.data_writer.history.odbc_plugin.shared",
"<0|1>",
DDS_BOOLEAN_FALSE);
if (retcode != DDS_RETCODE_OK) {
/* Report error */
}
/* Create Data Writer */
...
11.4 Durable Reader State
Durable reader state allows a DataReader to locally persists its state and remember
which data it has already received. When an application restarts, each DataReader that
has been configured to have durable reader state automatically loads its state from disk.
Data that was already received by the DataReader before the restart will be suppressed
so it is not sent over the network again.
RTI Data Distribution Service provides the capability to persist the state of a DataReader in
a relational database. This database is accessed using ODBC. See the Release Notes for
the list of supported relational databases.
For each DataReader that is configured to be durable, RTI Data Distribution Service will
create one database table with the following name RS<32 uuencoding of the reader vir-
tual GUID>. This table will be used to store the last sample (sequence number) received
from each virtual DataWriter. For DataReaders on keyed topics requesting instance-
ordering (see PRESENTATION QosPolicy (Section 6.4.6)), this state will be stored per
instance per virtual DataWriter, not simply per virtual DataWriter.
For the read/take methods that require calling return_loan(), a sample 's1' with
sequence number 'sn1' sent by a DataWriter 'dw1' will be considered as received when
the application return the loan on 'sn1' or any other sample sent by the same DataWriter
(same virtual GUID) with a sequence number equal or greater than 'sn1'. For example:
retcode = Foo_reader->take(data_seq, info_seq,
DDS_LENGTH_UNLIMITED, DDS_ANY_SAMPLE_STATE,
DDS_ANY_VIEW_STATE, DDS_ANY_INSTANCE_STATE);
if (retcode == DDS_RETCODE_NO_DATA) {

Chapter 11
11-14
return;
} else if (retcode != DDS_RETCODE_OK) {
/* report error */
return;
}
for (i = 0; i < data_seq.length(); ++i) {
/* Operate with the data */
}
/* Return the loan */
retcode = Foo_reader->return_loan(data_seq, info_seq);
if (retcode != DDS_RETCODE_OK) {
/* Report and error */
}
/* At this point the samples contained in data_seq will be consid-
ered as received. If the DataReader restarts, the samples will not
be received again */
For the read/take methods that do not require calling return_loan(), a sample 's1' with
sequence number 'sn1' sent by a DataWriter 'dw1' will be considered as received after
the application read or take 's1' or any other sample sent by the same DataWriter with a
sequence number equal or greater than 'sn1'. For example:
retcode = Foo_reader->take_next_sample(data,info);
/* At this point the sample contained in data will be considered as
received. All the samples with a sequence number smaller than the
sequence number associated with data will also be considered as
received. If the DataReader restarts these sample will not be
received again */
Important:
For DataReaders on keyed topics requesting topic ordering, if you use read/
take methods based on the instance handle, view_state, or instance_state, samples that
have not been taken or read by the application yet may still be considered as received.
To guarantee that every sample that is marked as received by the middleware has been
read/taken by the application, you must use read/take methods that do not depend on
the instance handle, view_state, or instance_state.
Important: The DataReader does not persist the full contents of the data in its historical
cache; it only persists a record of which data it has delivered. This distinction is not
meaningful if your application always uses the ‘take’ methods to access your data, since
these methods remove the data from the cache at the same time they deliver it to your
application. (See Read vs. Take (Section 7.4.3.1)) However, if your application uses the
‘read’ methods, leaving the data in the DataReader's cache after you've accessed it for the

11.4 Durable Reader State
11-15
11. Durability and
Persistence
first time, those previously viewed samples will not be restored to the DataReader's
cache in the event of a restart.
11.4.1 Durable Reader State Use Case
The following use case describes the durable reader state functionality:
1. A DataReader receives two samples with sequence number 1 and 2 published by
a DataWriter with virtual GUID 1. The application takes those samples.
2. After the application returns the loan on samples 1 and 2, the DataReader consid-
ers them as received and it persists the state change.
3. The process running the DataReader is stopped.
4. The DataReader is restarted.
Because all the samples with sequence number smaller or equal than 2 were con-
sidered as received, the reader will not ask for these samples to the DataWriter.
DataWriter
(vg: 1)
DataReader
(vg: 1)
1, 2
1, 2
take 1, 2
DataWriter
(vg: 1)
DataReader
(vg: 1)
return loan 1, 2
(dw vg: 1,last sn: 2)
DataWriter
(vg: 1)
DataReader
(vg: 1)
(dw vg: 1,last sn: 2)

Chapter 11
11-16
11.4.2 How To Configure a DataReader for Durable Reader State
To configure a DataReader with durable reader state, use the PROPERTY QosPolicy
(DDS Extension) (Section 6.5.15) associated with DataReaders and DomainParticipants.
A property defined in the DomainParticipant will be applicable to all the DataReaders
contained in the participant unless it is overwritten by the DataReaders. Table 11.2 lists
the supported properties.
Table 11.2 Durable Reader State Properties
Property Description
dds.data_reader.state.odbc.dsn
Required.
The ODBC DSN (Data Source Name) associated with the database
where the DataReader state must be persisted.
dds.data_reader.state.
filter_redundant_samples
To enable durable reader state, this property must be set to 1.
When set to 0, the reader state is not maintained and RTI Data Distri-
bution Service does not filter duplicate samples that may be coming
from the same virtual writer.
Default: 1
dds.data_reader.state.odbc.driver
This property indicates which ODBC driver to load. If the property is
not specified, RTI Data Distribution Service will try to use the standard
ODBC driver manager library (UnixOdbc on UNIX/Linux systems,
the Windows ODBC driver manager on Windows systems).
dds.data_reader.state.odbc.username These two properties configure the username and password used to
connect to the database.
Default: No password or username
dds.data_reader.state.odbc.password
dds.data_reader.state.restore
This property indicates if the persisted DataReader state must be
restored or not once the DataReader is restarted.
If this property is 0, the previous state will be deleted from the data-
base. If it is 1, the DataReader will restore its previous state from the
database content.
Default: 1

11.4 Durable Reader State
11-17
11. Durability and
Persistence
Example (C++ code):
/* Get default QoS */
...
retcode = DDSPropertyQosPolicyHelper::add_property(
readerQos.property,
"dds.data_reader.state.odbc.dsn",
"<user DSN>",
DDS_BOOLEAN_FALSE);
if (retcode != DDS_RETCODE_OK) {
/* Report error */
}
retcode = DDSPropertyQosPolicyHelper::add_property(
readerQos.property,
"dds.data_reader.state.odbc.driver",
"<ODBC library>",
DDS_BOOLEAN_FALSE);
if (retcode != DDS_RETCODE_OK) {
/* Report error */
}
retcode = DDSPropertyQosPolicyHelper::add_property(
readerQos.property,
"dds.data_reader.state.restore",
"<0|1>",
DDS_BOOLEAN_FALSE);
dds.data_reader.state.
checkpoint_frequency
This property controls how often the reader state is stored into the
database. A value of N means store the state once every N samples.
A high frequency will provide better performance. However, if the
reader is restarted it may receive some duplicate samples. These sam-
ples will be filtered by RTI Data Distribution Service and they will not
be propagated to the application.
Default: 1
dds.data_reader.state.persistence_
service.request_depth
This property indicates how many of the most recent historical sam-
ples the persisted DataReader wants to receive upon start-up.
Default: 0
Table 11.2 Durable Reader State Properties
Property Description

Chapter 11
11-18
if (retcode != DDS_RETCODE_OK) {
/* Report error */
}
/* Create Data Reader */
...
11.5 Data Durability
The data durability feature is an implementation of the OMG DDS Persistence Profile.
The DURABILITY QosPolicy (Section 6.5.6) allows an application to configure a
DataWriter so that the information written by the DataWriter survives beyond the life-
time of the DataWriter.
RTI Data Distribution Service implements TRANSIENT and PERSISTENT durability
using an external service called RTI Persistence Service, available for purchase as a sepa-
rate RTI product.
RTI Persistence Service receives information from DataWriters configured with TRAN-
SIENT or PERSISTENT durability and makes that information available to late-joining
DataReaders—even if the original DataWriter is not running.
The samples published by a DataWriter can be made durable by setting the kind field of
the DURABILITY QosPolicy (Section 6.5.6) to one of the following values:
❏ DDS_TRANSIENT_DURABILITY_QOS: RTI Data Distribution Service will store
previously published samples in memory using RTI Persistence Service, which
will send the stored data to newly discovered DataReaders.
❏ DDS_PERSISTENT_DURABILITY_QOS: RTI Data Distribution Service will store
previously published samples in permanent storage, like a disk, using RTI Persis-
tence Service, which will send the stored data to newly discovered DataReaders.
A DataReader can request TRANSIENT or PERSISTENT data by setting the kind field of
the corresponding DURABILITY QosPolicy (Section 6.5.6). A DataReader requesting
PERSISTENT data will not receive data from DataWriters or RTI Persistence Service appli-
cations that are configured with TRANSIENT durability.
11.5.1 RTI Persistence Service
RTI Persistence Service is an RTI Data Distribution Service application that is configured to
persist topic data. RTI Persistence Service is included with RTI Data Distribution Service
Professional Edition and Elite Edition
. For each one of the topics that must be persisted for

11.5 Data Durability
11-19
11. Durability and
Persistence
a specific domain, the service will create a DataWriter (known as PRSTDataWriter) and a
DataReader (known as PRSTDataReader). The samples received by the PRSTDataRead-
ers will be published by the corresponding PRSTDataWriters to be available for late-
joiners DataReaders.
For more information on RTI Persistence Service, please see:
❏ Chapter 21: Introduction to RTI Persistence Service
❏ Chapter 22: Configuring RTI Persistence Service
❏ Chapter 23: Running RTI Persistence Service
RTI Persistence Service can be configured to operate in PERSISTENT or TRANSIENT
mode:
❏ TRANSIENT mode The PRSTDataReaders and PRSTDataWriters will be created
with TRANSIENT durability and RTI Persistence Service will keep the received
samples in memory. Samples published by a TRANSIENT DataWriter will sur-
vive the DataWriter lifecycle but will not survive the lifecycle of RTI Persistence
Service (unless you are running multiple copies).
❏ PERSISTENT mode The PRSTDataWriters and PRSTDataReaders will be created
with PERSISTENT durability and RTI Persistence Service will store the received
samples in files or in an external relational database. Samples published by a
PERSISTENT DataWriter will survive the DataWriter lifecycle as well as any
restarts of RTI Persistence Service.
Peer-to-Peer Communication:
By default, a PERSISTENT/TRANSIENT DataReader will receive samples directly from
the original DataWriter if it is still alive. In this scenario, the DataReader may also receive
the same samples from RTI Persistence Service. Duplicates will be discarded at the mid-
dleware level. This Peer-To-Peer communication pattern is illustrated inFigure 11.6. To
use this peer-to-peer communication pattern, set the direct_communication field in the
DURABILITY QosPolicy (Section 6.5.6) to TRUE. A PERSISTENT/TRANSIENT
DataReader will receive information directly from PERSISTENT/TRANSIENT
DataWriters.
Relay Communication:
A PERSISTENT/TRANSIENT DataReader may also be configured to not receive sam-
ples from the original DataWriter. In this case the traffic is relayed by RTI Persistence Ser-
vice. This ‘relay communication’ pattern is illustrated in Figure 11.7. To use relay
communication, set the direct_communication field in the DURABILITY QosPolicy
(Section 6.5.6) to FALSE. A PERSISTENT/TRANSIENT DataReader will receive all the
information from RTI Persistence Service.

Chapter 11
11-20
DataWriter
(vg: 1)
DataReader
(vg: 1)
(vg: 1, sn: 0)
(vg: 1, sn: 0)
(vg: 1, sn: 0)
(vg: 1, sn: 0)
(vg: 1, sn: 0)
(vg: 1, sn: 0)
The application
only receives
one sample.
Figure 11.6
Peer-to-Peer Communication
RTI Persistence
Service
Figure 11.7 Relay Communication
DataWriter
(vg: 1)
DataReader
(vg: 1)
(vg: 1, sn: 0)
(vg: 1, sn: 0)
(vg: 1, sn: 0)
RTI Persistence
Service

12-1
12. Discovery
Chapter 12 Discovery
This chapter discusses how RTI Data Distribution Service objects on different nodes find
out about each other using the default Simple Discovery Protocol (SDP). It describes the
sequence of messages that are passed between RTI Data Distribution Service on the send-
ing and receiving sides.
This chapter includes the following sections:
❏ What is Discovery? (Section 12.1)
❏ Configuring the Peers List Used in Discovery (Section 12.2)
❏ Discovery Implementation (Section 12.3)
❏ Debugging Discovery (Section 12.4)
❏ Ports Used for Discovery (Section 12.5)
The discovery process occurs automatically, so you do not have to implement any spe-
cial code. We recommend that all users read What is Discovery? (Section 12.1) and Con-
figuring the Peers List Used in Discovery (Section 12.2). The remaining sections contain
advanced material for those who have a particular need to understand what is happen-
ing ‘under the hood.’ This information can help you debug a system in which objects are
not communicating.
You may also be interested in reading Chapter 13: Transport Plugins , as well as learning
about these QosPolicies:
❏ TRANSPORT_SELECTION QosPolicy (DDS Extension) (Section 6.5.20)
❏ TRANSPORT_BUILTIN QosPolicy (DDS Extension) (Section 8.5.8)
❏ TRANSPORT_UNICAST QosPolicy (DDS Extension) (Section 6.5.21)
❏ TRANSPORT_MULTICAST QosPolicy (DDS Extension) (Section 7.6.5)

Chapter 12
12-2
12.1 What is Discovery?
Discovery is the behind-the-scenes way in which RTI Data Distribution Service objects
(DomainParticipants, DataWriters, and DataReaders) on different nodes find out about
each other. Each DomainParticipant maintains a database of information about all the
active DataReaders and DataWriters that are in the same domain. This database is what
makes it possible for DataWriters and DataReaders to communicate. To create and refresh
the database, each application follows a common discovery process.
This chapter describes the default discovery mechanism known as the Simple Discovery
Protocol, which includes two phases: Simple Participant Discovery (Section 12.1.1) and
Simple Endpoint Discovery (Section 12.1.2). (Discovery can also be performed using the
Enterprise Discovery Protocol—this requires a separately purchased package, RTI Enter-
prise Discovery Service.)
The goal of these two phases is to build, for each DomainParticipant, a complete picture
of all the entities that belong to the remote participants that are in its peers list. The
peers list is the list of nodes with which a participant may communicate. It starts out the
same as the initial_peers list that you configure in the DISCOVERY QosPolicy (DDS
Extension) (Section 8.5.2). If the accept_unknown_peers flag in that same QosPolicy is
TRUE, then other nodes may also be added as they are discovered; if it is FALSE, then
the peers list will match the initial_peers list, plus any peers added using the Domain-
Participant’s add_peer() operation.
12.1.1 Simple Participant Discovery
This phase of the Simple Discovery Protocol is performed by the Simple Participant Dis-
covery Protocol (SPDP).
During the Participant Discovery phase, DomainParticipants learn about each other. The
DomainParticipant’s details are communicated to all other DomainParticipants in the
same domain by sending participant declaration messages, also known participant
DATA submessages. The details include the DomainParticipant’s unique identifying key
(GUID or Globally Unique ID described below), transport locators (addresses and port
numbers), and QoS. These messages are sent on a periodic basis using best-effort com-
munication.
Participant DATAs are sent periodically to maintain the liveliness of the DomainPartici-
pant. They are also used to communicate changes in the DomainParticipant’s QoS. Only
changes to QosPolicies that are part of the DomainParticipant’s built-in data (namely, the
USER_DATA QosPolicy (Section 6.5.23)) need to be propagated.

12.1 What is Discovery?
12-3
12. Discovery
When a DomainParticipant is deleted, a participant DATA (delete) submessage with the
DomainParticipant's identifying GUID is sent.
The GUID is a unique reference to an entity. It is composed of a GUID prefix and an
Entity ID. The GUID prefix is calculated from the IP address and the process ID. These
values are stored in the DomainParticipant’s WIRE_PROTOCOL QosPolicy (DDS Exten-
sion) (Section 8.5.9). The entityID is set by RTI Data Distribution Service (you may be able
to change it in a future version).
Once a pair of remote participants have discovered each other, they can move on to the
Endpoint Discovery phase, which is how DataWriters and DataReaders find each other.
12.1.2 Simple Endpoint Discovery
This phase of the Simple Discovery Protocol is performed by the Simple Endpoint Dis-
covery Protocol (SEDP).
During the Endpoint Discovery phase, RTI Data Distribution Service matches DataWriters
and DataReaders. Information (GUID, QoS, etc.) about your application’s DataReaders
and DataWriters is exchanged by sending publication/subscription declarations in
DATA messages that we will refer to as publication DATAs and subscription DATAs. The
Endpoint Discovery phase uses reliable communication.
As described in Section 12.3, these declaration or DATA messages are exchanged until
each DomainParticipant has a complete database of information about the participants in
its peers list and their entities. Then the discovery process is complete and the system
switches to a steady state. During steady state, participant DATAs are still sent periodi-
cally to maintain the liveliness status of participants. They may also be sent to commu-
nicate QoS changes or the deletion of a DomainParticipant.
When a remote DataWriter/DataReader is discovered, RTI Data Distribution Service deter-
mines if the local application has a matching DataReader/DataWriter. A ‘match’ between
the local and remote entities occurs only if the DataReader and DataWriter have the same
Topic, same data type, and compatible QosPolicies (which includes having the same par-
tition name string, see Section 6.4.5). Furthermore, if the DomainParticipant has been set
up to ignore certain DataWriters/DataReaders, those entities will not be considered dur-
ing the matching process. See Section 14.4.2 for more on ignoring specific publications
and subscriptions.
This ‘matching’ process occurs as soon as a remote entity is discovered, even if the entire
database is not yet complete: that is, the application may still be discovering other
remote entities.

Chapter 12
12-4
A DataReader and DataWriter can only communicate with each other if each one’s appli-
cation has hooked up its local entity with the matching remote entity. That is, both sides
must agree to the connection.
Section 12.3 describes the details about the discovery process.
12.2 Configuring the Peers List Used in Discovery
The RTI Data Distribution Service discovery process will try to contact all possible partic-
ipants on each remote node in the ‘initial peers list,’ which comes from the initial_peers
field of the DomainParticipant’s DISCOVERY QosPolicy.
The ‘initial peers list’ is just that: an initial list of peers to contact. Furthermore, the peers
list merely contains potential peers—there is no requirement that there actually be RTI
Data Distribution Service applications on the hosts in the list.
After startup, you can add to the ‘peers list’ with the add_peer() operation (see Adding
to the Peers List (Section 8.5.2.3)). The ‘peer list’ may also grow as peers are automati-
cally discovered (if accept_unknown_peers is TRUE, see Controlling Acceptance of
Unknown Peers (Section 8.5.2.6)).
When you call get_default_participant_qos() for a DomainParticipantFactory, the values
used for the DiscoveryQosPolicy’s initial_peers and multicast_receive_addresses may
come from the following:
❏ A file named NDDS_DISCOVERY_PEERS, which is formatted as described in
Section 12.2.3. The file must be in the same directory as your application’s exe-
cutable.
❏ An environment variable named NDDS_DISCOVERY_PEERS, defined as a
comma-separated list of peer descriptors (see Section 12.2.2).
If NDDS_DISCOVERY_PEERS does not contain a multicast address, then
multicast_receive_addresses is cleared and the RTI discovery process will not listen for
discovery messages via multicast.
If NDDS_DISCOVERY_PEERS contains one or more multicast addresses, the
addresses are stored in multicast_receive_addresses, starting at element 0. They will be
stored in the order in which they appear in NDDS_DISCOVERY_PEERS.
Note: Currently, RTI Data Distribution Service will only listen for discovery traffic on the
first multicast address (element 0) in multicast_receive_addresses.

12.2 Configuring the Peers List Used in Discovery
12-5
12. Discovery
If both the file and environment variable are found, the file takes precedence and the
environment variable will be ignored.
1
If neither are found
2
, RTI Data Distribution Ser-
vice will use a default value. See the online documentation for details (in the section on
the DISCOVERY QosPolicy).
The file and environment variable make it easy to reconfigure which nodes will take
part in the discovery process—without recompiling your application.
The file and environment variable are the possible sources for the default initial peers
list. You can, of course, explicitly set the initial list by calling the DomainParticipant’s
set_default_qos() operation, or add to the list after startup with the DomainParticipant’s
add_peer() operation (see Section 8.5.2.3).
If you set NDDS_DISCOVERY_PEERS and You Want to Communicate over Shared Memory:
Suppose you want to communicate with other RTI Data Distribution Service applications
on the same host and you are explicitly setting NDDS_DISCOVERY_PEERS (generally
in order to use unicast discovery with applications on other hosts).
If the local host platform does not support the shared memory transport, then you can
include the name of the local host in the NDDS_DISCOVERY_PEERS list. (To check if
your platform supports shared memory, see the Platform Notes document.)
If the local host platform supports the shared memory transport, then you must do one
of the following:
❏ Include "shmem://" in the NDDS_DISCOVERY_PEERS list. This will cause
shared memory to be used for discovery and data traffic for applications on the
same host.
or:
❏ Include the name of the local host in the NDDS_DISCOVERY_PEERS list, and
disable the shared memory transport in the TRANSPORT_BUILTIN QosPolicy
(DDS Extension) (Section 8.5.8) of the DomainParticipant. This will cause UDP
loopback to be used for discovery and data traffic for applications on the same
host.
1. This is true even if the file is empty.
2. Note for VxWorks 5.4 Users: RTI Data Distribution Service will try to open the file with fopen(). If the
NDDS_DISCOVERY_PEERS file is not accessible, on VxWorks 5.4 systems, you may see a file-system depen-
dent error message. For example, when using the default ‘rsh’ file-system, you may see the following mes-
sage: <hostName>:NDDS_DISCOVERY_PEERS: No such file or directory.

Chapter 12
12-6
12.2.1 Peer Descriptor Format
A peer descriptor string specifies a range of participants at a given locator. Peer descrip-
tor strings are used in the DISCOVERY QosPolicy (DDS Extension) (Section 8.5.2)
initial_peers field (see Section 8.5.2.2) and the DomainParticipant’s add_peer() operation
(see Section 8.5.2.3).
The anatomy of a peer descriptor is illustrated in Figure 12.1 using a special "StarFabric"
transport example.
A peer descriptor consists of:
❏ [optional] A participant ID limit, which specifies the maximum participant ID
that will be contacted by the RTI Data Distribution Service discovery process at the
given locator. If omitted, a default value of 4 is implied.
❏ A locator, as described in Section 12.2.1.1.
These are separated by the '@' character. The separator may be omitted if a participant
ID limit is not explicitly specified.
Figure 12.1 Peer Descriptor Address String

12.2 Configuring the Peers List Used in Discovery
12-7
12. Discovery
The "participant ID limit" only applies to unicast locators; it is ignored for multicast
locators (and therefore should be omitted for multicast peer descriptors).
12.2.1.1 Locator Format
A locator string specifies a transport and an address in string format. Locators are used
to form peer descriptors. A locator is equivalent to a peer descriptor with the default
participant ID limit (4).
A locator consists of:
❏ [optional] Transport name (alias or class). This identifies the set of transport plug-
ins (transport aliases) that may be used to parse the address portion of the loca-
tor. Note that a transport class name is an implicit alias used to refer to all the
transport plug-in instances of that class.
❏ [optional] An address, as described in Section 12.2.1.2.
These are separated by the "://" string. The separator is specified if and only if a trans-
port name is specified.
If a transport name is specified, the address may be omitted; in that case all the unicast
addresses (across all transport plug-in instances) associated with the transport class are
implied. Thus, a locator string may specify several addresses.
If an address is specified, the transport name and the separator string may be omitted;
in that case all the available transport plug-ins for the Entity may be used to parse the
address string.
The transport names for the built-in transport plug-ins are:
❏ shmem - Shared Memory Transport
❏ udpv4 - UDPv4 Transport
❏ udpv6 - UDPv6 Transport
12.2.1.2 Address Format
An address string specifies a transport-independent network address that qualifies a
transport-dependent address string. Addresses are used to form locators. Addresses are
also used in the DISCOVERY QosPolicy (DDS Extension) (Section 8.5.2)
multicast_receive_addresses and the
DDS_TransportMulticastSettings_t::receive_address fields. An address is equivalent
to a locator in which the transport name and separator are omitted.

Chapter 12
12-8
An address consists of:
❏ [optional] A network address in IPv4 or IPv6 string notation. If omitted, the net-
work address of the transport is implied.
❏ [optional] A transport address, which is a string that is passed to the transport for
processing. The transport maps this string into
NDDS_Transport_Property_t::address_bit_count bits. If omitted, the network
address is used as the fully qualified address.
These are separated by the '#' character. If a separator is specified, it must be followed by
a non-empty string which is passed to the transport plug-in.
The bits resulting from the transport address string are prepended with the network
address. The least significant NDDS_Transport_Property_t::address_bit_count bits of
the network address are ignored.
If you omit the ‘#’ separator and the string is not a valid IPv4 or IPv6 address, it is
treated as a transport address with an implicit network address (of the transport plug-
in).
12.2.2 NDDS_DISCOVERY_PEERS Environment Variable Format
You can set the default value for the initial peers list in an environment variable named
NDDS_DISCOVERY_PEERS. Multiple peer descriptor entries must be separated by
commas. Table 12.1 shows some examples. The examples use an implied maximum par-
ticipant ID of 4 unless otherwise noted. (If you need instructions on how to set environ-
ment variables, see the Getting Started Guide).
Table 12.1 NDDS_DISCOVERY_PEERS Environment Variable Examples
NDDS_DISCOVERY_PEERS Description of Host(s)
239.255.0.1 multicast
localhost localhost
192.168.1.1 10.10.30.232 (IPv4)
FAA0::1 FAA0::0 (IPv6)
himalaya,gangotri himalaya and gangotri
1@himalaya,1@gangotri
himalaya and gangotri (with a maximum participant ID of
1 on each host)
FAA0::0localhost
FAA0::0localhost (could be a UDPv4 transport plug-in reg-
istered at network address of FAA0::0) (IPv6)

12.2 Configuring the Peers List Used in Discovery
12-9
12. Discovery
12.2.3 NDDS_DISCOVERY_PEERS File Format
You can set the default value for the initial peers list in a file named
NDDS_DISCOVERY_PEERS. The file must be in the your application’s current work-
ing directory.
The file is optional. If it is found, it supersedes the values in any environment variable of
the same name.
Entries in the file must contain a sequence of peer descriptors separated by whitespace
or the comma (',') character. The file may also contain comments starting with a semico-
lon (';') character until the end of the line.
Example file contents:
;; NDDS_DISCOVERY_PEERS - Default Discovery Configuration File
;; Multicast builtin.udpv4://239.255.0.1 ; default discovery multicast addr
udpv4://himalaya
himalaya accessed using the "udpv4" transport plug-ins)
(IPv4)
udpv4://FAA0::0localhost
localhost using the "udpv4" transport plug-ins) registered
at network address FAA0::0
udpv4://
all unicast addresses accessed via the "udpv4" (UDPv4)
transport plug-ins)
0/0/R
#0/0/R
0/0/R (StarFabric)
starfabric://0/0/R
starfabric://#0/0/R
0/0/R (StarFabric) using the "starfabric" (StarFabric) trans-
port plug-ins
starfabric://FBB0::0#0/0/R
0/0/R (StarFabric) using the "starfabric" (StarFabric) trans-
port plug-ins registered at network address FAA0::0
starfabric://
all unicast addresses accessed via the "starfabric" (StarFab-
ric) transport plug-ins
shmem://
all unicast addresses accessed via the "shmem" (shared
memory) transport plug-ins
shmem://FCC0::0
all unicast addresses accessed via the "shmem" (shared
memory) transport plug-ins registered at network address
FCC0::0
Table 12.1 NDDS_DISCOVERY_PEERS Environment Variable Examples
NDDS_DISCOVERY_PEERS Description of Host(s)

Chapter 12
12-10
;; Unicast
localhost,192.168.1.1 ; A comma can be used a separator
FAA0::1 FAA0::0#localhost ; Whitespace can be used as a separator
1@himalaya ; Max participant ID of 1 on 'himalaya'
1@gangotri
;; UDPv4
udpv4://himalaya ; 'himalaya' via 'udpv4' transport plugin(s)
udpv4://FAA0::0#localhost ; 'localhost' via 'updv4' transport plugin
; registered at network address FAA0::0
;; Shared Memory
shmem:// ; All 'shmem' transport plugin(s)
builtin.shmem:// ; The builtin builtin 'shmem' transport plugin
shmem://FCC0::0 ; Shared memory transport plugin registered
; at network address FCC0::0
;; StarFabric
0/0/R ; StarFabric node 0/0/R
starfabric://0/0/R ; 0/0/R accessed via 'starfabric'
; transport plugin(s)
starfabric://FBB0::0#0/0/R ; StarFabric transport plugin registered
; at network address FBB0::0
starfabric:// ; All 'starfabric' transport plugin(s)
12.3 Discovery Implementation
Note: this section contains advanced material not required by most users.
Discovery is implemented using built-in DataWriters and DataReaders. These are the
same class of entities your application uses to send/receive data. That is, they are also of
type DDSDataWriter/DDSDataReader. For each DomainParticipant, three built-in
DataWriters and three built-in DataReaders are automatically created for discovery pur-
poses. Figure 12.2 shows how these objects are used. (For more on built-in DataReaders
and DataWriters, see Chapter 14: Built-In Topics).
The implementation is split into two separate protocols:
Simple Participant Discovery Protocol (SPDP)
+ Simple Endpoint Discovery Protocol (SEDP)
= Simple Discovery Protocol (SDP)
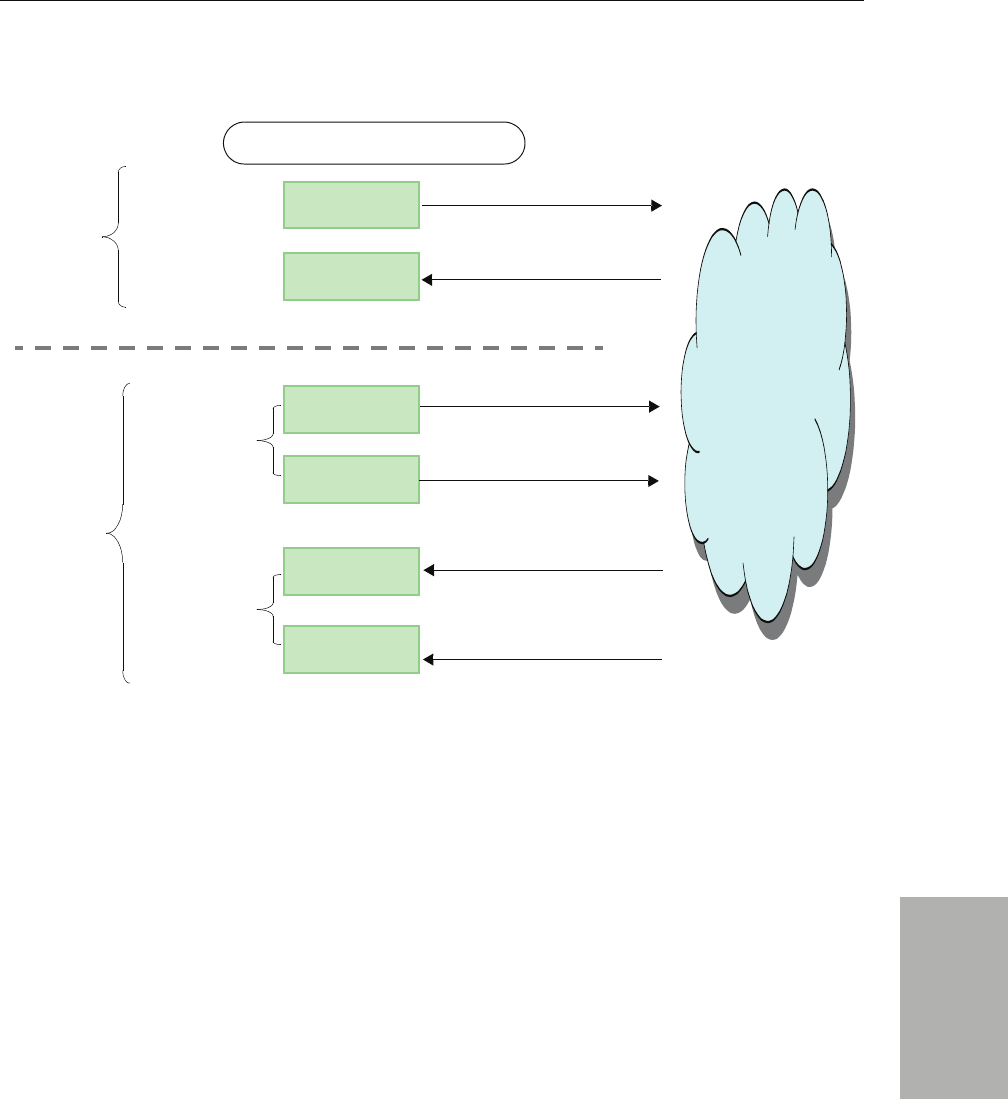
12.3 Discovery Implementation
12-11
12. Discovery
12.3.1 Participant Discovery
When a DomainParticipant is created, a DataWriter and a DataReader are automatically
created to exchange participant DATA messages in the network. These DataWriters and
DataReaders are "special" because the DataWriter can send to a given list of destinations,
regardless of whether there is an RTI Data Distribution Service application at the destina-
Figure 12.2 Built-in Writers and Readers for Discovery
For each DomainParticipant, there are six objects automatically created for discovery purposes.
The top two objects are used to send/receive participant DATA messages, which are used in the
Participant Discovery phase to find remote DomainParticipants. This phase uses best-effort
communications. Once the participants are aware of each other, they move on to the Endpoint
Discovery Phase to learn about each other’s DataWriters and DataReaders. This phase uses
reliable communications.
Builtin
DataWriter
Builtin
DataReader
Advertises this
participant’s
DataWriters and
DataReaders
Discovers other
participants’
DataWriters and
DataReaders
Advertises this
participant
Discovers other
participants
participant DATA
participant DATA
publication DATA
subscription DATA
publication DATA
subscription DATA
DomainParticipant
Participant
Discovery
Phase
Endpoint
(Writer/
Reader)
Discovery
Phase
Network
Builtin
DataWriter
Builtin
DataWriter
Builtin
DataReader
Builtin
DataReader
“DCPSParticipant” builtin topic
“DCPSParticipant” builtin topic
“DCPSPublication” builtin topic
“DCPSSubscription” builtin topic
“DCPSPublication” builtin topic
“DCPSSubscription” builtin topic

Chapter 12
12-12
tion, and the DataReader can receive data from any source, whether the source is previ-
ously known or not. In other words, these special readers and writers do not need to
discover the remote entity and perform a match before they can communicate with each
other.
When a DomainParticipant joins or leaves the network, it needs to notify its peer partici-
pants. The list of remote participants to use during discovery comes from the peer list
described in the DISCOVERY QosPolicy (DDS Extension) (Section 8.5.2). The remote
participants are notified via participant DATA messages. In addition, if a participant’s
QoS is modified in such a way that other participants need to know about the change
(that is, changes to the USER_DATA QosPolicy (Section 6.5.23)), a new participant DATA
will be sent immediately.
Participant DATAs are also used to maintain a participant’s liveliness status. These are
sent at the rate set in the participant_liveliness_assert_period in the
DISCOVERY_CONFIG QosPolicy (DDS Extension) (Section 8.5.3).
Let’s examine what happens when a new remote participant is discovered. If the new
remote participant is in the local participant's peer list, the local participant will add that
remote participant into its database. If the new remote participant is not in the local
application's peer list, it may still be added, if the accept_unknown_peers field in the
DISCOVERY QosPolicy (DDS Extension) (Section 8.5.2) is set to TRUE.
Once a remote participant has been added to the RTI Data Distribution Service database,
RTI Data Distribution Service keeps track of that remote participant’s
participant_liveliness_lease_duration. If a participant DATA for that participant (identi-
fied by the GUID) is not received at least once within the
participant_liveliness_lease_duration, the remote participant is considered stale, and
the remote participant, together with all its entities, will be removed from the database
of the local participant.
To keep from being purged by other participants, each participant needs to periodically
send a participant DATA to refresh its liveliness. The rate at which the participant DATA is
sent is controlled by the participant_liveliness_assert_period in the participant’s
DISCOVERY_CONFIG QosPolicy (DDS Extension) (Section 8.5.3). This exchange,
which keeps Participant A from appearing ‘stale,’ is illustrated in Figure 12.3.
Figure 12.4 shows what happens when Participant A terminates ungracefully and there-
fore needs to be seen as ‘stale.’

12.3 Discovery Implementation
12-13
12. Discovery
Figure 12.3 Periodic ‘participant DATAs’
The DomainParticipant on Node A sends a ‘participant DATA’ to Node B, which is in Node A’s peers list.
This occurs regardless of whether or not there is an
RTI Data Distribution Service application on Node B.
① The green short dashed lines are periodic participant DATAs. The time between these messages is
controlled by the participant_liveliness_assert_period in the DiscoveryConfig QosPolicy.
➁ In addition to the periodic participant DATAs, ‘initial repeat messages’ (shown in blue, with longer
dashes) are sent from A to B. These messages are sent at a random time between
min_initial_participant_announcement_period and max_initial_participant_announcement_period (in A’s
DiscoveryConfig QosPolicy). The number of these initial repeat messages is set in
initial_participant_announcements.
p
a
r
t
i
c
i
p
a
n
t
A
D
A
T
A
Participant created
Participant’s UserDataQosPolicy
modified
Participant destroyed
p
a
r
t
i
c
i
p
a
n
t
A
D
A
T
A
(
d
e
l
e
t
e
)
Node A
Node B
① Participant A’s
DDS_DomainParticipantQos.discovery_config.
participant_liveliness_assert_period
①
①
①
①
①
①
➁
➁
➁ Random time between
min_initial_participant_announcement_period
and
max_initial_participant_announcement_period
(in A’s
DDS_DomainParticipantQos.discovery_config)

Chapter 12
12-14
Figure 12.4 Ungraceful Termination of a Participant
Participant A is removed from participant B’s database if it is not refreshed within the liveliness lease
duration. Dashed lines are periodic participant DATA messages.
(Periodic resends of ‘participant B DATA’ from B to A are omitted from this diagram for simplicity.
Initial repeat messages from A to B are also omitted from this diagram—these messages are sent at a
random time between min_initial_participant_announcement_period and
max_initial_participant_announcement_period, see Figure 12.3.)
p
a
r
t
i
c
i
p
a
n
t
A
D
A
T
A
Participant created
Participant ungracefully
terminated
Node A
Node B
Remote participant A
considered ‘stale,’
removed from database
Participant created
New remote participant A
added to database
➀
➀
➁ Participant A’s
DDS_DomainParticipantQos.discovery_config.
participant_liveliness_lease_duration
➁
➁
➀ Participant A’s
DDS_DomainParticipantQos.discovery_config.
participant_liveliness_assert_period

12.3 Discovery Implementation
12-15
12. Discovery
12.3.1.1 Refresh Mechanism
To ensure that a late-joining participant does not need to wait until the next refresh of
the remote participant DATA to discover the remote participant, there is a resend mecha-
nism. If the received participant DATA is from a never-before-seen remote participant,
and it is in the local participant's peers list, the application will resend its own participant
DATA to all its peers. This resend can potentially be done multiple times, with a random
sleep time in between. Figure 12.5 illustrates this scenario.
The number of retries and the random amount of sleep between them are controlled by
each participant’s DISCOVERY_CONFIG QosPolicy (DDS Extension) (Section 8.5.3)
(see ① and ✍ in Figure 12.5).
Figure 12.6 provides a summary of the messages sent during the participant discovery
phase.

Chapter 12
12-16
Figure 12.5 Resending ‘participant DATA’ to a Late-Joiner
Participant A has Participant B in its peers list. Participant B does not have Participant A in its peers
list, but [DiscoveryQosPolicy.accept_unknown_peers] is set to DDS_BOOLEAN_TRUE. Participant A
joins the system after B has sent its initial announcement. After B discovers A, it waits for time
➁, then
resends its participant DATA.
(Initial repeat messages are omitted from this diagram for simplicity, see Figure 12.3.)
p
a
r
t
i
c
i
p
a
n
t
A
D
A
T
A
Participant created
p
a
r
t
i
c
i
p
a
n
t
B
D
A
T
A
Node A
Node B
Participant created
New remote participant A
added to database
➁
➁
participant A already in database,
no action taken
➀
New remote participant B
added to database
➀
➀wait random time (between
min_initial_participant_announcement_period
and
max_initial_participant_announcement_period)
for [initial_participant_announcements] = 2
(using values from A’s DiscoveryQosPolicy)
p
a
r
t
i
c
i
p
a
n
t
A
D
A
T
A
p
a
r
t
i
c
i
p
a
n
t
A
D
A
T
A
p
a
r
t
i
c
i
p
a
n
t
B
D
A
T
A
participant B already in
database, no action taken
Resend participant DATA to
all peers
➁ same as ➀, but using participant B’s
QoS
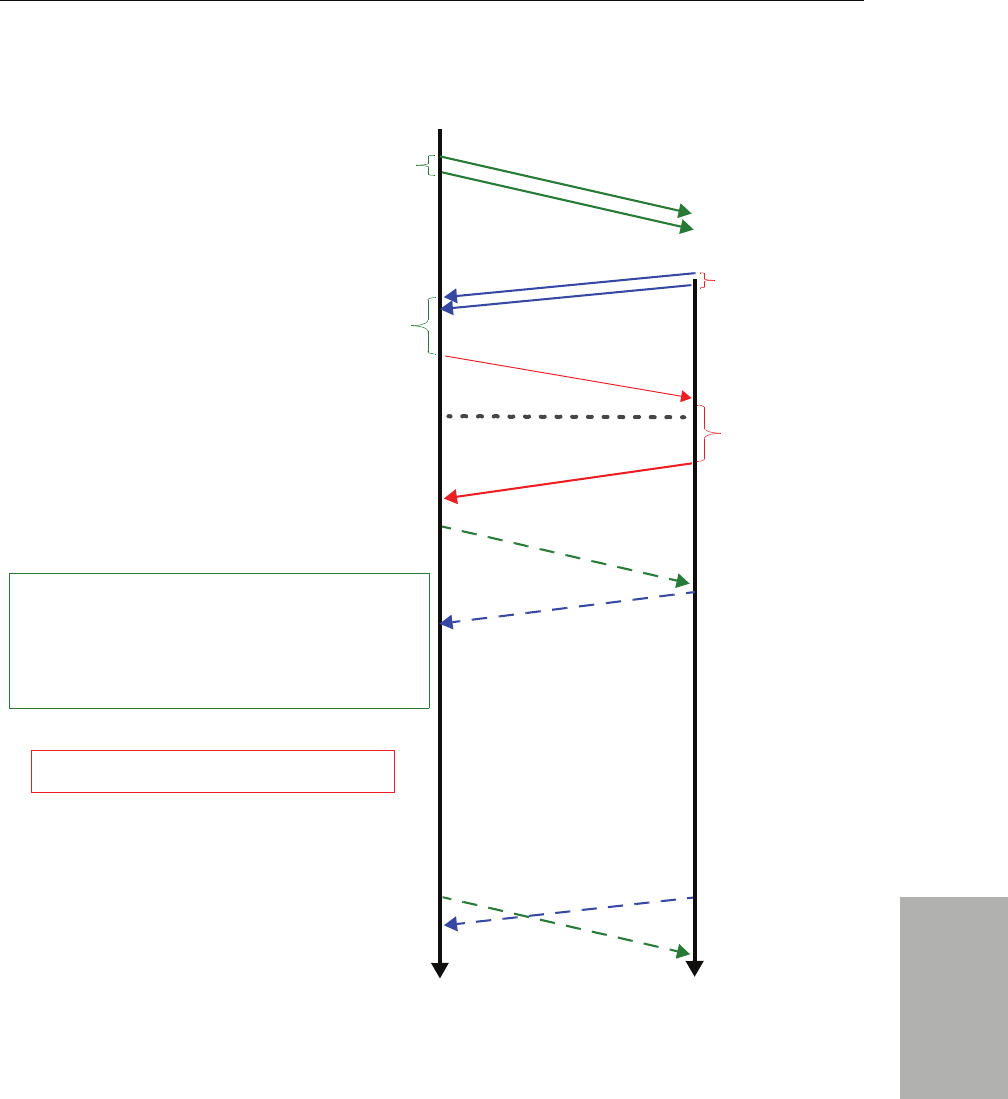
12.3 Discovery Implementation
12-17
12. Discovery
p
e
r
i
od
i
c
p
a
r
t
i
c
i
p
a
n
t
B
D
A
T
A
Figure 12.6 Participant Discovery Summary
Participants A and B both have each other in their peers lists. Participant A is created first.
p
a
r
t
ic
ip
a
n
t
A
D
AT
A
Participant created
Newly discovered participant B
added to database
Node A
Node B
Participant created
p
a
r
t
i
c
i
p
a
n
t
B
D
A
T
A
p
a
r
t
i
c
i
p
a
n
t
A
D
A
T
A
Newly discovered
participant A added
to database
Participants have discovered
each other
p
a
r
t
i
c
i
p
a
n
t
B
D
A
T
A
p
e
r
i
o
d
i
c
p
a
r
t
i
c
i
p
a
n
t
B
D
A
T
A
p
e
r
io
d
ic
p
a
r
t
i
c
ip
a
n
t
A
D
A
T
A
Participant B already in database,
no action required
➀ wait random time (between
min_initial_participant_announcement_period
and
max_initial_participant_announcement_period)
for [initial_participant_announcements] = 1
(using values from A’s DiscoveryQosPolicy)
➀
➁ same as ①, but using Participant B’s QoS
➁
p
e
r
io
d
ic
p
a
r
t
ic
ip
a
n
t
A
D
A
T
A
in
it
ia
l
r
e
p
e
a
t
o
f
p
a
r
t
ic
ip
a
n
t
A
D
A
T
A
i
n
i
t
i
a
l
r
e
p
e
a
t
o
f
p
a
r
t
i
c
i
p
a
n
t
B
D
A
T
A
➀
➁

Chapter 12
12-18
12.3.1.2 Maintaining DataWriter Liveliness for kinds AUTOMATIC and MANUAL_BY_PARTICIPANT
To maintain the liveliness of DataWriters that have a LIVELINESS QosPolicy (Section
6.5.11) kind field set to AUTOMATIC or MANUAL_BY_PARTICIPANT, RTI Data Dis-
tribution Service uses a built-in DataWriter and DataReader pair, referred to as the inter-
participant reader and inter-participant writer.
If the DomainParticipant has any DataWriters with Liveliness QosPolicy kind set to
AUTOMATIC, the inter-participant writer will reliably broadcast an AUTOMATIC
liveliness message at a period equal to the shortest lease_duration of these DataWriters.
(The lease_duration is a field in the LIVELINESS QosPolicy (Section 6.5.11).) Figure 12.7
illustrates this scenario.
If the DomainParticipant has any DataWriters with Liveliness QosPolicy kind set to
MANUAL_BY_PARTICIPANT, RTI Data Distribution Service will periodically check to
see if any of them have called write(), assert_liveliness(), dispose() or unregister(). The
rate of this check is every X seconds, where X is the smallest lease_duration among all
the DomainParticipant's MANUAL_BY_PARTICIPANT DataWriters. (The
lease_duration is a field in the LIVELINESS QosPolicy (Section 6.5.11).) If any of the
Figure 12.7 DataWriter with AUTOMATIC Liveliness
A liveliness message is sent automatically when a DataWriter with AUTOMATIC Liveliness kind is
created, and then periodically, every DDS_DataWriterQos.liveliness.lease_duration.
A
U
T
O
M
A
T
I
C
l
i
v
e
l
i
n
e
s
s
m
e
s
s
a
g
e
Participant created
DataWriter C created
with liveliness kind = AUTOMATIC
Node A
Node B
➀ DataWriter C’s
DDS_DataWriterQos.liveliness.lease_duration
➀
➀
➀
➀

12.3 Discovery Implementation
12-19
12. Discovery
MANUAL_BY_PARTICIPANT DataWriters have called any of those operations, the
inter-participant writer will reliably broadcast a MANUAL liveliness message.
If a DomainParticipant's assert_liveliness() operation is called, and that DomainPartici-
pant has any MANUAL_BY_PARTICIPANT DataWriters, the inter-participant writer
will reliably broadcast a MANUAL liveliness message within the above-defined X time
period. These MANUAL liveliness messages are used to update the liveliness of all the
DomainParticipant's MANUAL_BY_PARTICIPANT DataWriters, as well as the liveli-
ness of the DomainParticipant itself. Figure 12.8 shows an example sequence.
Figure 12.8 DataWriter with MANUAL_BY_PARTICIPANT Liveliness
Participant created
Node A
Node B
➀ DataWriter C’s
DDS_DataWriterQos.liveliness.lease_duration
DomainParticipant::assert_liveliness()
(no liveliness message is sent)
DataWriter C created
with liveliness kind = MANUAL_BY_PARTICIPANT
DomainParticipant::assert_liveliness()
(causes Liveliness message to be sent later)
Calling assert_liveliness(), write(), dispose(), or
unregister_instance() on DataWriter C
(causes Liveliness message to be sent later)
M
A
N
U
A
L
L
i
v
e
l
i
n
e
s
s
m
e
s
s
a
g
e
M
A
N
U
A
L
L
i
v
e
l
i
n
e
s
s
m
e
s
s
a
g
e
➀
➀
Once a MANUAL_BY_PARTICIPANT DataWriter is created, subsequent calls to
assert_liveliness, write, dispose, or unregister_instance will trigger Liveliness messages, which
update the liveliness status of all the participant’s DataWriters, and the participant itself.

Chapter 12
12-20
The inter-participant reader receives data from remote inter-participant writers and
asserts the liveliness of remote DomainParticipants endpoints accordingly.
If the DomainParticipant has no DataWriters with LIVELINESS QosPolicy (Section 6.5.11)
kind set to AUTOMATIC or MANUAL_BY_PARTICIPANT, then no liveliness mes-
sages are ever sent from the inter-participant writer.
12.3.2 Endpoint Discovery
As we saw in Figure 12.2 on page 12-11, reliable DataReaders and Datawriters are auto-
matically created to exchange publication/subscription information for each Domain-
Participant. We will refer to these as ‘discovery endpoint readers and writers.’ However,
nothing is sent through the network using these entities until they have been ‘matched’
with their remote counterparts. This ‘matching’ is triggered by the Participant Discov-
ery phase. The goal of the Endpoint Discovery phase is to add the remote endpoint to
the local database, so that user-created endpoints (your application’s DataWriters/
DataReaders) can communicate with each other.
When a new remote DomainParticipant is discovered and added to a participant’s data-
base, RTI Data Distribution Service assumes that the remote DomainParticipant is imple-
mented in the same way and therefore is creating the appropriate counterpart entities.
Therefore, RTI Data Distribution Service will automatically add two remote discovery
endpoint readers and two remote discovery endpoint writers for that remote Domain-
Participant into the local database. Once that is done, there is now a match with the local
discovery endpoint writers and readers, and publication DATAs and subscription DATAs
can then be sent between the discovery endpoint readers/writers of the two
DomainParticipant.
When you create a DataWriter/DataReader for your user data, a publication/subscription
DATA describing the newly created object is sent from the local discovery endpoint
writer to the remote discovery endpoint readers of the remote DomainParticipants that
are currently in the local database.
If your application changes any of the following QosPolicies for a local user-data
DataWriter/DataReader, a modified subscription/publication DATA is sent to propagate the
QoS change to other DomainParticipants:
❏ TOPIC_DATA QosPolicy (Section 5.2.1)
❏ GROUP_DATA QosPolicy (Section 6.4.4)
❏ USER_DATA QosPolicy (Section 6.5.23)
❏ DEADLINE QosPolicy (Section 6.5.4)

12.3 Discovery Implementation
12-21
12. Discovery
❏ OWNERSHIP_STRENGTH QosPolicy (Section 6.5.14)
❏ PARTITION QosPolicy (Section 6.4.5)
❏ TIME_BASED_FILTER QosPolicy (Section 7.6.4)
❏ LIFESPAN QoS Policy (Section 6.5.10)
What the above QosPolicies have in common is that they are all changeable and part of
the built-in data (see Chapter 14: Built-In Topics).
Similarly, if the application deletes any user-data writers/readers, the discovery end-
point writer/readers send delete publication/subscription DATAs. In addition to send-
ing publication/subscription DATAs, the discovery endpoint writer will check
periodically to see if the remote discovery endpoint reader is up-to-date. (The rate for
this check is the publication_writer.heartbeat_period or
subscription_writer.heartbeat_period in the DISCOVERY_CONFIG QosPolicy (DDS
Extension) (Section 8.5.3). If the discovery endpoint writer has not been acknowledged
by the remote discovery endpoint reader regarding receipt of the latest DATA, the dis-
covery endpoint writer will send a special Heartbeat (HB) message with the Final bit set
to 0 (F=0) to request acknowledgement from the remote discovery endpoint reader, as
seen in Figure 12.9.
Discovery endpoint writers and readers have their HISTORY QosPolicy (Section 6.5.8)
set to KEEP_LAST, and their DURABILITY QosPolicy (Section 6.5.6) set to
TRANSIENT_LOCAL. Therefore, even if the remote DomainParticipant has not yet been
discovered at the time the local user’s DataWriter/DataReader is created, the remote
DomainParticipant will still be informed about the previously created DataWriter/
DataReader. This is achieved by the HB and ACK/NACK that are immediately sent by
the built-in endpoint writer and built-in endpoint reader respectively when a new
remote participant is discovered. Figure 12.10 and Figure 12.11 illustrate this sequence
for HB and ACK/NACK triggers, respectively.
Endpoint discovery latency is determined by the following members of the DomainPar-
ticipant’s DISCOVERY_CONFIG QosPolicy (DDS Extension) (Section 8.5.3):
❏ publication_writer
❏ subscription_writer
❏ publication_reader
❏ subscription_reader
When a remote entity record is added, removed, or changed in the database, matching is
performed with all the local entities. Only after there is a successful match on both ends
can an application’s user-created DataReaders and DataWriters communicate with each
other.

Chapter 12
12-22
Figure 12.9 Endpoint Discovery Summary
Assume participants A and B have been discovered on both sides. A’s
DiscoveryConfigQosPolicy.publication_writer.heartbeats_per_max_samples = 0, so no HB is piggybacked
with the publication DATA. A HB with F=0 is a request for an ACK/NACK. The periodic and initial repeat
participant DATAs are omitted from the diagram.
p
u
b
lic
a
t
io
n
C
D
A
T
A
DataWriter C created
Modify DataWriter C’s
UserData QoS
Node A
Node B
Remote DataWriter C discovered,
added to database
DataWriter C’s QoS modified,
record in database modified
p
e
r
i
o
d
i
c
H
B
(
F=
0
)
A
C
K
N
A
C
K
DataWriter C deleted
➁wait random time between B’s
[DDS_DomainParticipantQos.
discovery_config.
publication_reader.min_heartbeat_
response_delay] and
[...max_heartbeat_response_delay]
m
o
d
i
f
i
e
d
p
u
b
l
i
c
a
t
i
o
n
C
D
A
T
A
p
e
r
i
o
d
i
c
H
B
(
F=
0
)
A
C
K
N
A
C
K
d
e
l
e
t
e
p
u
b
l
i
c
a
t
i
o
n
C
D
A
T
A
p
e
r
i
o
d
i
c
H
B
(
F=
0
)
A
C
K
N
A
C
K
DataWriter C removed
from database
➀ A’s DDS_DomainParticipantQos.discovery_config.
publication_writer.heartbeat_period
➀
➀
➁
➁
➁
Periodic HB not sent since A
knows that B is up-to-date
➀
➀

12.3 Discovery Implementation
12-23
12. Discovery
Figure 12.10 DataWriter Discovered by Late-Joiner, Triggered by HB
Writer C is created on Participant A before Participant A discovers Participant B. Assuming
DiscoveryConfigQosPolicy.publication_writer.heartbeats_per_max_samples = 0, no HB is piggybacked with the
publication DATA. Participant B has A in its peer list, but not vice versa. Accept_unknown_locators is true. On
A, in response to receiving the new participant B DATA message, a participant A DATA message is sent to B. The
discovery endpoint reader on A will also send an ACK/NACK to the discovery endpoint writer on B. (Initial repeat
participant messages and periodic participant messages are omitted from this diagram for simplicity, see
Figure 12.3.)
P
u
b
l
i
c
a
t
i
o
n
C
D
A
T
A
s
e
n
t
t
o
d
i
s
c
o
v
e
r
y
e
n
d
p
o
i
n
t
r
e
a
d
e
r
s
o
f
d
i
s
c
o
v
e
r
e
d
r
e
m
o
t
e
p
a
r
t
i
c
i
p
a
n
t
s
i
n
d
a
t
a
b
a
s
e
Create DataWriter C
Node A
Node B
H
B
(
F=
1
)
A
C
K
N
A
C
K
p
e
r
i
o
d
i
c
H
B
(
F
=
0
)
A
C
K
Remote DataWriter C finally
discovered, added to database
➁ wait random time between B’s
[DDS_DomainParticipantQos.discovery_config.
publication_reader.min_heartbeat_response_delay]
and (...max_heartbeat_response_delay]
➁
➁
➂ wait random time between A’s
[DDS_DomainParticipantQos.discovery_config.
publication_writer.min_nack_response_delay]
and (...max_nack_response_delay]
➀ Participant A’s
[DDS_DomainParticipant
Qos.discovery_config.
publication_writer.
heartbeat_period)
➀
➂
➀
Node B hasn’t been discovered by
Node A yet, so it doesn’t receive
the publication DATA for C
P
u
b
l
i
c
a
t
i
o
n
C
D
A
T
A
s
e
n
t
t
o
d
i
s
c
o
v
e
r
y
e
n
d
p
o
i
n
t
r
e
a
d
e
r
o
f
r
e
m
o
t
e
p
a
r
t
i
c
i
p
a
n
t
B
Send HB to see if the
discovery publication
reader on Node B is
up-to-date.
Latest DATA from C has
not been received
p
a
r
t
i
c
i
p
a
n
t
B
D
A
T
A
Participant B created

Chapter 12
12-24
Figure 12.11 DataWriter Discovered by Late-Joiner, Triggered by ACKNACK
Writer C is created on Participant A before Participant A discovers Participant B. Assuming
DiscoveryConfigQosPolicy.publication_writer.heartbeats_per_max_samples = 0, no HB is piggybacked with
the publication DATA message. Participant A has B in its peer list, but not vice versa.
Accept_unknown_locators is true. In response to receiving the new Participant A DATA message on node B,
a participant B DATA message will be sent to A. The discovery endpoint writer on Node B will also send a
HB to the discovery endpoint reader on Node A. These are omitted in the diagram for simplicity. (Initial
repeat participant messages and periodic participant messages are omitted from this diagram, see
Figure 12.3.)
P
u
b
l
i
c
a
t
i
o
n
C
D
A
T
A
s
e
n
t
t
o
d
i
s
c
o
v
e
r
y
e
n
d
p
o
i
n
t
r
e
a
d
e
r
s
o
f
d
i
s
c
o
v
e
r
e
d
r
e
m
o
t
e
p
a
r
t
i
c
i
p
a
n
t
s
Create DataWriter C
Node A
Node B
C
D
A
T
A
+
H
B
(
F=
0
)
A
C
K
N
A
C
K
A
C
K
N
A
C
K
Remote DataWriter C discovered,
added to database
➁ wait random time between B’s
[DDS_DomainParticipantQos.discovery_config.
publication_reader.min_heartbeat_response_delay]
and (...max_heartbeat_response_delay]
➁
➂
wait random time between A’s
[DDS_DomainParticipantQos.discovery_config.
publication_writer.min_nack_response_delay]
and (...max_nack_response_delay]
➀ Participant A’s
[DDS_DomainParticipant
Qos.discovery_config.
publication_writer.
heartbeat_period)
➀
➂
➀
Participant B created
A is discovered. ACKNACK sent
immediately to discovery endpoint writer
of the newly discovered remote
participant
p
e
r
i
o
d
i
c
A
D
A
T
A


Chapter 12
12-26
12.3.3 Discovery Traffic Summary
This diagram shows both phases of the discovery process. Participant A is created first, followed by
Participant B. Each has the other in its peers list. After they have discovered each other, a DataWriter is
created on Participant A. Periodic participant DATAs, HBs and ACK/NACKs are omitted from this
diagram.
p
a
r
t
ic
ip
a
n
t
A
D
AT
A
Participant A created
Node A
Node B
p
a
r
t
i
c
i
p
a
n
t
B
D
A
T
A
p
u
b
l
i
c
a
t
i
o
n
C
D
A
T
A
p
a
r
t
i
c
i
p
a
n
t
A
D
A
T
A
Remote DataWriter C
discovered, added to database
Newly discovered Participant
B added to database
p
a
r
t
i
c
i
p
a
n
t
B
D
A
T
A
p
u
b
l
i
c
a
t
i
o
n
C
D
A
T
A
(
d
e
l
e
t
e
)
p
a
r
t
i
c
i
p
a
n
t
A
D
A
T
A
(
d
e
l
e
t
e
)
p
a
r
t
i
c
i
p
a
n
t
B
D
A
T
A
(
d
e
l
e
t
e
)
Newly discovered Participant A
added to database
Participant B created
DataWriter C created
DataWriter C deleted
Remote DataWriter C deleted,
removed from database
Participant A destroyed
Remote Participant A
removed from database
➀ wait random time (between
min_initial_participant_announcement_period
and
max_initial_participant_announcement_period)
for [initial_participant_announcements] = 1
(using values from A’s DiscoveryConfigQosPolicy)
➁ same as ➀, but using participant
B’s QoS
➀
➁
Participant B destroyed
in
it
ia
l
r
e
p
e
a
t
o
f
p
a
r
t
ic
ip
a
n
t
A
D
AT
A
i
n
i
t
i
a
l
r
e
p
e
a
t
o
f
p
a
r
t
i
c
i
p
a
n
t
B
D
A
T
A
➁
➀

12.3 Discovery Implementation
12-27
12. Discovery
12.3.4 Discovery-Related QoS
Each DomainParticipant needs to be uniquely identified in the domain and specify which
other DomainParticipants it is interested in communicating with. The
WIRE_PROTOCOL QosPolicy (DDS Extension) (Section 8.5.9) uniquely identifies a
DomainParticipant in the domain. The DISCOVERY QosPolicy (DDS Extension) (Section
8.5.2) specified the peer participants it is interested in communicating with.
There is a trade-off between the amount of traffic on the network for the purposes of
discovery and the delay in reaching steady state when the DomainParticipant is first cre-
ated.
For example, if the DISCOVERY_CONFIG QosPolicy (DDS Extension) (Section 8.5.3)’s
participant_liveliness_assert_period and participant_liveliness_lease_duration fields
are set to small values, the discovery of stale remote DomainParticipants will occur faster,
but more discovery traffic will be sent over the network. Setting the participant’s
heartbeat_period
1
to a small value can cause late-joining DomainParticipants to discover
remote user-data DataWriters and DataReaders at a faster rate, but RTI Data Distribution
Service might send HBs to other nodes more often. This timing can be controlled by the
following DomainParticipant QosPolicies:
DISCOVERY QosPolicy (DDS Extension) (Section 8.5.2) — specifies how other Domain-
Participants in the network can communicate with this DomainParticipant, and
which other DomainParticipants in the network this DomainParticipant is interested
in communicating with. See also:Ports Used for Discovery (Section 12.5)
DISCOVERY_CONFIG QosPolicy (DDS Extension) (Section 8.5.3) — specifies the QoS
of the discovery readers and writers (parameters that control the HB and ACK
rates of discovery endpoint readers/writers, and periodic refreshing of participant
DATA from discovery participant readers/writers).
DOMAIN_PARTICIPANT_RESOURCE_LIMITS QosPolicy (DDS Extension) (Section
8.5.4) — specifies the number of local and remote entities expected in the system.
WIRE_PROTOCOL QosPolicy (DDS Extension) (Section 8.5.9) — specifies the
rtps_app_id and rtps_host_id that uniquely identify the participant in the
domain.
The other important parameter is the domain ID: DomainParticipants can only discover
each other if they belong to the same domain. The domain ID is a parameter passed to
the create_participant() operation (see Section 8.3.1).
1. heartbeat_period is part of the DDS_RtpsReliableWriterProtocol_t structure used in the
DISCOVERY_CONFIG QosPolicy (DDS Extension) (Section 8.5.3)’s publication_writer and
subscription_writer fields.

Chapter 12
12-28
12.4 Debugging Discovery
To understand the flow of messages during discovery, you can increase the verbosity of
the messages logged by RTI Data Distribution Service so that you will see whenever a
new entity is discovered, and whenever there is a match between a local entity and a
remote entity.
This can be achieved with the logging API:
NDDSConfigLogger::get_instance()->set_verbosity_by_category
(NDDS_CONFIG_LOG_CATEGORY_ENTITIES, NDDS_CONFIG_LOG_VERBOSITY_STATUS_REMOTE);
Using the scenario in the summary diagram in Section 12.3.3, these are the messages as
seen on DomainParticipant A:
[D0049|ENABLE]DISCPluginManager_onAfterLocalParticipantEnabled:announcing new
local participant: 0XA0A01A1,0X5522,0X1,0X1C1
[D0049|ENABLE]DISCPluginManager_onAfterLocalParticipantEnabled:at
{46c614d9,0C43B2DC}
• (The above messages mean: First participant A DATA sent out when partici-
pant A is enabled.)
DISCSimpleParticipantDiscoveryPluginReaderListener_onDataAvailable:discovered
new participant: host=0x0A0A01A1, app=0x0000552B, instance=0x00000001
DISCSimpleParticipantDiscoveryPluginReaderListener_onDataAvailable:at
{46c614dd,8FA13C1F}
DISCParticipantDiscoveryPlugin_assertRemoteParticipant:plugin discovered/updated
remote participant: 0XA0A01A1,0X552B,0X1,0X1C1
DISCParticipantDiscoveryPlugin_assertRemoteParticipant:at {46c614dd,8FACE677}
DISCParticipantDiscoveryPlugin_assertRemoteParticipant:plugin accepted new
remote participant: 0XA0A01A1,0X552B,0X1,0X1C1
DISCParticipantDiscoveryPlugin_assertRemoteParticipant:at {46c614dd,8FACE677}
• (The above messages mean: Received participant B DATA.)
DISCSimpleParticipantDiscoveryPlugin_remoteParticipantDiscovered:re-announcing
participant self: 0XA0A01A1,0X5522,0X1,0X1C1
DISCSimpleParticipantDiscoveryPlugin_remoteParticipantDiscovered:at
{46c614dd,8FC02AF7}
• (The above messages mean: Resending participant A DATA to the newly dis-
covered remote participant.)
PRESPsService_linkToLocalReader:assert remote 0XA0A01A1,0X552B,0X1,0X200C2,
local 0x000200C7 in reliable reader service

12.4 Debugging Discovery
12-29
12. Discovery
PRESPsService_linkToLocalWriter:assert remote 0XA0A01A1,0X552B,0X1,0X200C7,
local 0x000200C2 in reliable writer service
PRESPsService_linkToLocalWriter:assert remote 0XA0A01A1,0X552B,0X1,0X4C7, local
0x000004C2 in reliable writer service
PRESPsService_linkToLocalWriter:assert remote 0XA0A01A1,0X552B,0X1,0X3C7, local
0x000003C2 in reliable writer service
PRESPsService_linkToLocalReader:assert remote 0XA0A01A1,0X552B,0X1,0X4C2, local
0x000004C7 in reliable reader service
PRESPsService_linkToLocalReader:assert remote 0XA0A01A1,0X552B,0X1,0X3C2, local
0x000003C7 in reliable reader service
PRESPsService_linkToLocalReader:assert remote 0XA0A01A1,0X552B,0X1,0X100C2,
local 0x000100C7 in best effort reader service
• (The above messages mean: Automatic matching of the discovery readers and
writers. A built-in remote endpoint's object ID always ends with Cx.)
DISCSimpleParticipantDiscoveryPluginReaderListener_onDataAvailable:discovered
modified participant: host=0x0A0A01A1, app=0x0000552B, instance=0x00000001
DISCParticipantDiscoveryPlugin_assertRemoteParticipant:plugin discovered/updated
remote participant: 0XA0A01A1,0X552B,0X1,0X1C1
DISCParticipantDiscoveryPlugin_assertRemoteParticipant:at {46c614dd,904D876C}
• (The above messages mean: Received participant B DATA.)
DISCPluginManager_onAfterLocalEndpointEnabled:announcing new local publication:
0XA0A01A1,0X5522,0X1,0X80000003
DISCPluginManager_onAfterLocalEndpointEnabled:at {46c614d9,1013B9F0}
DISCSimpleEndpointDiscoveryPluginPDFListener_onAfterLocalWriterEnabled:announc-
ing new publication: 0XA0A01A1,0X5522,0X1,0X80000003
DISCSimpleEndpointDiscoveryPluginPDFListener_onAfterLocalWriterEnabled:at
{46c614d9,101615EB}
• (The above messages mean: Publication C DATA has been sent.)
DISCSimpleEndpointDiscoveryPlugin_subscriptionReaderListenerOnDataAvailable:dis-
covered subscription: 0XA0A01A1,0X552B,0X1,0X80000004
DISCSimpleEndpointDiscoveryPlugin_subscriptionReaderListenerOnDataAvailable:at
{46c614dd,94FAEFEF}
DISCEndpointDiscoveryPlugin_assertRemoteEndpoint:plugin discovered/updated
remote endpoint: 0XA0A01A1,0X552B,0X1,0X80000004
DISCEndpointDiscoveryPlugin_assertRemoteEndpoint:at {46c614dd,950203DF}
• (The above messages mean: Receiving subscription D DATA from Node B.)
PRESPsService_linkToLocalWriter:assert remote 0XA0A01A1,0X552B,0X1,0X80000004,
local 0x80000003 in best effort writer service
• (The above message means: User-created DataWriter C and DataReader D are
matched.)

Chapter 12
12-30
[D0049|DELETE_CONTAINED]DISCPluginManager_onAfterLocalEndpointDeleted:announc-
ing disposed local publication: 0XA0A01A1,0X5522,0X1,0X80000003
[D0049|DELETE_CONTAINED]DISCPluginManager_onAfterLocalEndpointDeleted:at
{46c61501,288051C8}
[D0049|DELETE_CONTAINED]DISCSimpleEndpointDiscoveryPluginPDFListener_onAfterLoca
lWriterDeleted:announcing disposed publication: 0XA0A01A1,0X5522,0X1,0X80000003
[D0049|DELETE_CONTAINED]DISCSimpleEndpointDiscoveryPluginPDFListener_onAfterLoca
lWriterDeleted:at {46c61501,28840E15}
• (The above messages mean: Publication C DATA(delete) has been sent.)
DISCPluginManager_onBeforeLocalParticipantDeleted:announcing before disposed
local participant: 0XA0A01A1,0X5522,0X1,0X1C1
DISCPluginManager_onBeforeLocalParticipantDeleted:at {46c61501,28A11663}
• (The above messages mean: Participant A DATA(delete) has been sent.)
DISCParticipantDiscoveryPlugin_removeRemoteParticipantsByCookie:plugin removing
3 remote entities by cookie
DISCParticipantDiscoveryPlugin_removeRemoteParticipantsByCookie:at
{46c61501,28E38A7C}
DISCParticipantDiscoveryPlugin_removeRemoteParticipantI:plugin discovered dis-
posed remote participant: 0XA0A01A1,0X552B,0X1,0X1C1
DISCParticipantDiscoveryPlugin_removeRemoteParticipantI:at {46c61501,28E68E3D}
DISCParticipantDiscoveryPlugin_removeRemoteParticipantI:remote entity removed
from database: 0XA0A01A1,0X552B,0X1,0X1C1
DISCParticipantDiscoveryPlugin_removeRemoteParticipantI:at {46c61501,28E68E3D}
• (The above messages mean: Removing discovered entities from local database,
before shutting down.)
As you can see, the messages are encoded, since they are primarily used by RTI support
personnel.
For more information on the message logging API, see Controlling Messages from RTI
Data Distribution Service (Section 18.2).
If you notice that a remote entity is not being discovered, check the QoS related to dis-
covery (see Section 12.3.4).
If a remote entity is discovered, but does not match with a local entity as expected,
check the QoS of both the remote and local entity.

12.5 Ports Used for Discovery
12-31
12. Discovery
12.5 Ports Used for Discovery
There are two kinds of traffic in an RTI Data Distribution Service application: discovery
(meta) traffic, and user traffic. Meta-traffic is for data (declarations) that is sent between
the automatically-created discovery writers and readers; user traffic is for data that is
sent between user-created DataWriters and DataReaders. To keep the two kinds of traffic
separate, RTI Data Distribution Service uses different ports, as described below.
Note: The ports described in this section are used for incoming data. RTI Data Distribu-
tion Service uses ephemeral ports for outbound data.
RTI Data Distribution Service uses the RTPS wire protocol. The discovery protocols
defined by RTPS rely on well-known ports to initiate discovery. These well-known ports
define the multicast and unicast ports on which a Participant will listen for meta-traffic
from other Participants. The meta-traffic contains the information required by RTI Data
Distribution Service to establish the presence of remote DDS entities in the network.
The well-known incoming ports are defined by RTPS in terms of port mapping expres-
sions with several tunable parameters. This allows you to customize what network
ports are used for receiving data by RTI Data Distribution Service. These parameters are
shown in Table 12.2.
(For defaults and valid ranges, please see the online documenta-
tion.)
In order for all Participants in a system to correctly discover each other, it is important
that they all use the same port mapping expressions.
Table 12.2 WireProtocol QosPolicy’s rtps_well_known_ports (DDS_RtpsWellKnownPorts_t)
Type Field Name Description
DDS_Long
port_base
The base port offset. All mapped well-known
ports are offset by this value. Resulting ports
must be within the range imposed by the under-
lying transport.
domain_id_gain
Tunable gain parameters. See Section 12.5.4.
participant_id_gain
builtin_multicast_port_offset
Additional offset for meta-traffic port. See
Inbound Ports for Meta-Traffic (Section 12.5.1).
builtin_unicast_port_offset
user_multicast_port_offset
Additional offset for user traffic port. See
Inbound Ports for User Traffic (Section 12.5.2).
user_unicast_port_offset

Chapter 12
12-32
In addition to the parameters listed in Table 12.2, the port formulas described below
depend on:
❏ The Domain ID specified when the DomainParticipant is created (see
Section 8.3.1). The Domain ID ensures no port conflicts exist between Partici-
pants belonging to different domains. This also means that discovery traffic in
one domain is not visible to DomainParticipants in other domains.
❏ The participant_id is a field in the WIRE_PROTOCOL QosPolicy (DDS Exten-
sion) (Section 8.5.9), see Section 8.5.9.1. The participant_id ensures that unique
unicast port numbers are assigned to DomainParticipants belonging to the same
domain on a given host.
Backwards Compatibility: RTI Data Distribution Service 4.5 supports the standard DDS
Interoperability Wire Protocol based on the Real-time Publish-Subscribe (RTPS) proto-
col. Because this protocol is not compatible with that used by prior versions of RTI Data
Distribution Service (4.2c and older), applications built with 4.5 (as well as 4.4, 4.3, and
4.2e) will not interoperate with applications built with versions 4.2c and older. The
default port mapping from domainID and participant index has also been changed
according to the new interoperability specification. The message types and formats used
by RTPS have also changed.
Port Aliasing: When modifying the port mapping parameters, avoid port aliasing. This
would result in undefined discovery behavior. The chosen parameter values will also
determine the maximum possible number of domains in the system and the maximum
number of participants per domain. Additionally, any resulting mapped port number
must be within the range imposed by the underlying transport. For example, for
UDPv4, this range typically equals [1024 - 65535].
12.5.1 Inbound Ports for Meta-Traffic
The Wire Protocol QosPolicy’s rtps_well_known_ports.metatraffic_unicast_port deter-
mines the port used for receiving meta-traffic using unicast:
metatraffic_unicast_port = port_base +
(domain_id_gain * Domain ID) +
(participant_id_gain * participant_id) +
builtin_unicast_port_offset

12.5 Ports Used for Discovery
12-33
12. Discovery
Similarly, rtps_well_known_ports.metatraffic_multicast_port determines the port
used for receiving meta-traffic using multicast. The corresponding multicast group
addresses are specified via multicast_receive_addresses (see Section 8.5.2.4).
metatraffic_multicast_port = port_base +
(domain_id_gain * Domain ID) +
builtin_multicast_port_offset
Note: Multicast is only used for meta-traffic if a multicast address is specified in the
NDDS_DISCOVERY_PEERS environment variable or file or if the
multicast_receive_addresses field of the DISCOVERY_CONFIG QosPolicy (DDS Exten-
sion) (Section 8.5.3) is set.
12.5.2 Inbound Ports for User Traffic
RTPS also defines the default multicast and unicast ports on which DataReaders and
DataWriters receive user traffic. These default ports can be overridden using the
DataReader’s TRANSPORT_MULTICAST QosPolicy (DDS Extension) (Section 7.6.5) and
TRANSPORT_UNICAST QosPolicy (DDS Extension) (Section 6.5.21), or the
DataWriter’s TRANSPORT_UNICAST QosPolicy (DDS Extension) (Section 6.5.21).
The WireProtocol QosPolicy’s rtps_well_known_ports.usertraffic_unicast_port deter-
mines the port used for receiving user data using unicast:
usertraffic_unicast_port = port_base +
(domain_id_gain * Domain ID) +
(participant_id_gain * participant_id)+
user_unicast_port_offset
Similarly, rtps_well_known_ports.usertraffic_multicast_port determines the port used
for receiving user data using multicast. The corresponding multicast group addresses
can be configured using the TRANSPORT_UNICAST QosPolicy (DDS Extension) (Sec-
tion 6.5.21).
usertraffic_multicast_port = port_base +
(domain_id_gain * Domain ID) +
user_multicast_port_offset
12.5.3 Automatic Selection of participant_id and Port Reservation
The WIRE_PROTOCOL QosPolicy (DDS Extension) (Section 8.5.9)
rtps_reserved_ports_mask field determines what type of ports are reserved when the
DomainParticipant is enabled. See Choosing Participant IDs (Section 8.5.9.1).
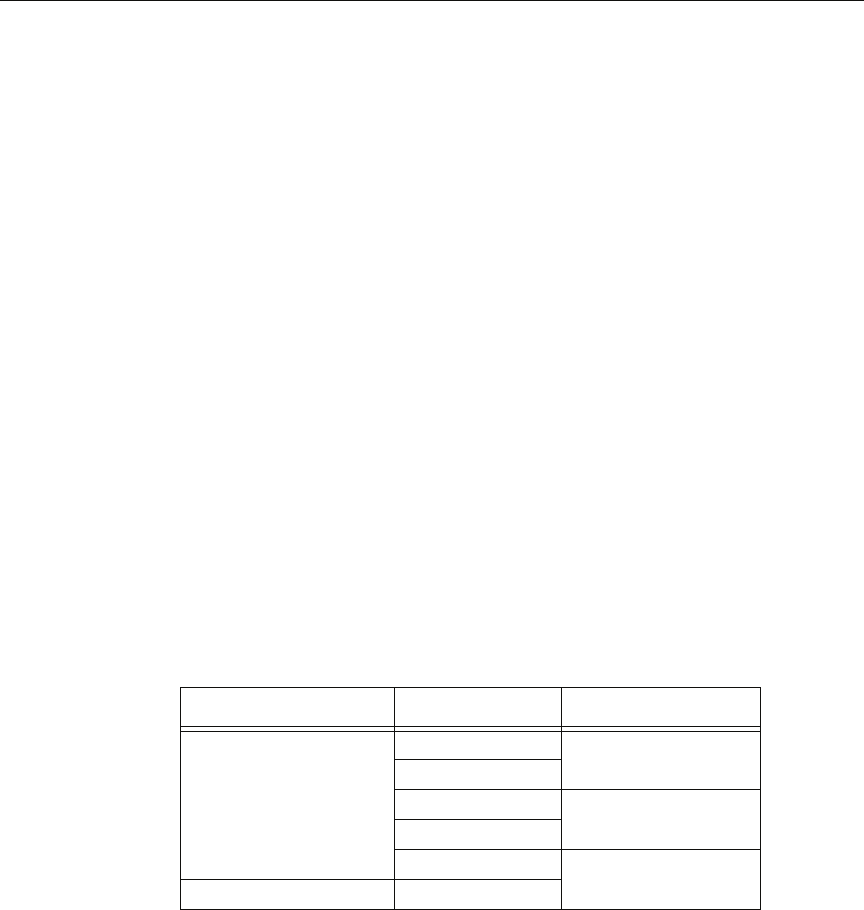
Chapter 12
12-34
12.5.4 Tuning domain_id_gain and participant_id_gain
The domain_id_gain is used as a multiplier of the Domain ID. Together with
participant_id_gain (Section 12.5.4), these values determine the highest Domain ID and
participant_id allowed on this network.
In general, there are two ways to set up the domain_id_gain and participant_id_gain
parameters.
❏ If domain_id_gain > participant_id_gain, it results in a port mapping layout
where all DomainParticipants in a domain occupy a consecutive range of
domain_id_gain ports. Precisely, all ports occupied by the domain fall within:
(port_base + (domain_id_gain * Domain ID))
and:
(port_base + (domain_id_gain * (Domain ID + 1)) - 1)
In this case, the highest Domain ID is limited only by the underlying transport's
maximum port. The highest participant_id, however, must satisfy:
max_participant_id < (domain_id_gain / participant_id_gain)
❏ On the contrary, if domain_id_gain <= participant_id_gain, it results in a port
mapping layout where a given domain's DomainParticipant instances occupy
ports spanned across the entire valid port range allowed by the underlying
transport. For instance, it results in the following potential mapping:
In this case, the highest participant_id is limited only by the underlying trans-
port's maximum port. The highest domain_id, however, must satisfy:
max_domain_id < (participant_id_gain / domain_id_gain)
Mapped Port Domain ID Participant ID
higher port number
1
2
0
1
1
0
1
0
lower port number 0

12.5 Ports Used for Discovery
12-35
12. Discovery
The domain_id_gain also determines the range of the port-specific offsets:
domain_id_gain >
abs(builtin_multicast_port_offset - user_multicast_port_offset)
and
domain_id_gain >
abs(builtin_unicast_port_offset - user_unicast_port_offset)
Violating this may result in port aliasing and undefined discovery behavior.
The participant_id_gain also determines the range of builtin_unicast_port_offset and
user_unicast_port_offset.
participant_id_gain > abs(builtin_unicast_port_offset -
user_unicast_port_offset)
In all cases, the resulting ports must be within the range imposed by the underlying
transport.

Chapter 12
12-36

13-1
13. Transport Plugins
Chapter 13 Transport Plugins
RTI Data Distribution Service has a pluggable transports architecture. The core of RTI
Data Distribution Service is transport agnostic—it does not make any assumptions about
the actual transports used to send and receive messages. Instead, RTI Data Distribution
Service uses an abstract "transport API" to interact with the transport plugins that imple-
ment that API. A transport plugin implements the abstract transport API, and performs
the actual work of sending and receiving messages over a physical transport.
There are essentially three categories of transport plugins:
❏ Builtin Transport Plugins RTI Data Distribution Service comes with a set of com-
monly used transport plugins. These ‘builtin’ plugins include UDPv4, UDPv6,
and shared memory. So that RTI Data Distribution Service applications can work
out-of-the-box, some of these are enabled by default (see TRANSPORT_BUILTIN
QosPolicy (DDS Extension) (Section 8.5.8)).
❏ Extension Transport Plugins RTI offers extension transports, including RTI Secure
WAN Transport (see Chapter 19 and Chapter 20) and RTI TCP Transport (see
Chapter 29).
❏ Custom-developed Transport Plugins RTI supports the use of custom transport
plugins. This is a powerful capability that distinguishes RTI Data Distribution
Service from competing middleware approaches. If you are interested in devel-
oping a custom transport plugin for RTI Data Distribution Service, please contact
your local RTI representative or email [email protected].
This chapter describes the following:
❏ Builtin Transport Plugins (Section 13.1)
❏ Extension Transport Plugins (Section 13.2)
❏ The NDDSTransportSupport Class (Section 13.3)

Chapter 13
13-2
❏ Explicitly Creating Builtin Transport Plugin Instances (Section 13.4)
❏ Setting Builtin Transport Properties of the Default Transport Instance—get/
set_builtin_transport_properties() (Section 13.5)
❏ Setting Builtin Transport Properties with the PropertyQosPolicy (Section 13.6)
❏ Installing Additional Builtin Transport Plugins with register_transport() (Section
13.7)
❏ Installing Additional Builtin Transport Plugins with PropertyQosPolicy (Section
13.8)
❏ Other Transport Support Operations (Section 13.9)
13.1 Builtin Transport Plugins
There are two ways in which the builtin transport plugins may be registered:
❏ Default builtin Transport Instances: Builtin transports that are turned "on" in the
TRANSPORT_BUILTIN QosPolicy (DDS Extension) (Section 8.5.8) are implicitly
registered when (a) the DomainParticipant is enabled, (b) the first DataWriter/
DataReader is created, or (c) you look up a builtin DataReader (by calling
lookup_datareader() on a Subscriber), whichever happens first. The builtin
transport plugins have default properties. If you want to change these proper-
ties, do so before
1
the transports are registered.
❏ Other Transport Instances: There are two ways to install non-default builtin trans-
port instances:
• Transport plugins may be explicitly registered by first creating an instance
of the transport plugin (by calling NDDS_Transport_UDPv4_new(),
NDDS_Transport_UDPv6_new() or NDDS_Transport_Shmem_new(),
see Section 13.4), then calling register_transport() (
Section 13.7). (For exam-
ple, suppose you want an extra instance of a transport.) (Not available for
the Java or .NET API.)
• Additional builtin transport instances can also be installed through the
PROPERTY QosPolicy (DDS Extension) (Section 6.5.15).
1. Any transport property changes made after the plugin is registered will have no effect.

13.2 Extension Transport Plugins
13-3
13. Transport Plugins
To configure the properties of the builtin transports:
❏ Set properties by calling set_builtin_transport_property() (see Section 13.5)
or
❏ Specify predefined property strings in the DomainParticipant’s PropertyQosPol-
icy, as described in
Section 13.6.
❏ For other builtin transport instances:
• If the builtin transport plugin is created with
NDDS_Transport_UDPv4_new(), NDDS_Transport_UDPv6_new() or
NDDS_Transport_Shmem_new(), properties can be specified during
creation time. See Explicitly Creating Builtin Transport Plugin Instances
(Section 13.4).
• If the additional builtin transport instances are installed through the
PROPERTY QosPolicy (DDS Extension) (Section 6.5.15), the properties of
the builtin transport plugins can also be specified through that same
QosPolicy.
13.2 Extension Transport Plugins
If you want to change the properties for an extension transport plugin, do so before
1
the
plugin is registered.
There are two ways to install an extension transport plugin:
❏ Implicit Registration: Transports can be installed through the predefined strings in
the DomainParticipant’s PropertyQosPolicy. Once the transport’s properties are
specified in the PropertyQosPolicy, the transport will be implicitly registered
when (a) the DomainParticipant is enabled, (b) the first DataWriter/DataReader is
created, or (c) you look up a builtin DataReader (by calling lookup_datareader()
on a Subscriber), whichever happens first.
QosPolicies can also be configured from XML resources (files, strings)—with this
approach, you can change the QoS without recompiling the application. The QoS
settings are automatically loaded by the DomainParticipantFactory when the
first DomainParticipant is created. For more information, see Chapter 15: Config-
uring QoS with XML.
1. Any transport property changes made after the plugin is registered will have no effect.

Chapter 13
13-4
❏ Explicit Registration: Transports may be explicitly registered by first creating an
instance of the transport plugin (see Section 13.4) and then calling
register_transport() (
see Section 13.7).
13.3 The NDDSTransportSupport Class
The register_transport() and set_builtin_transport_property() operations are part of
the NDDSTransportSupport class, which includes the operations listed in Table 13.1.
13.4 Explicitly Creating Builtin Transport Plugin Instances
The builtin transports (UDPv4, UDPv6, and Shared Memory) are implicitly created by
default (if they are enabled via the TRANSPORT_BUILTIN QosPolicy (DDS Extension)
(Section 8.5.8)). Therefore, you only need to explicitly create a new instance if you want
an extra instance (suppose you want two UDPv4 transports, one with special settings).
Transport plugins may be explicitly registered by first creating an instance of the trans-
port plugin and then calling register_transport() (
Section 13.7). (For example, suppose
you want an extra instance of a transport.) (Not available for the Java API.)
To create an instance of a builtin transport plugin, use one of the following functions:
Table 13.1 Transport Support Operations
Operation Description Reference
register_transport
Registers a transport plugin for use with a
DomainParticipant.
Section 13.7
get_builtin_transport_property
Gets the properties used to create a builtin
transport plugin.
Section 13.5
set_builtin_transport_property
Sets the properties used to create a builtin
transport plugin.
add_send_route Adds a route for outgoing messages. Section 13.9.1
add_receive_route Adds a route for incoming messages. Section 13.9.2
lookup_transport
Looks up a transport plugin within a Domain-
Participant.
Section 13.9.3

13.5 Setting Builtin Transport Properties of the Default Transport Instance—get/set_builtin_transport_properties()
13-5
13. Transport Plugins
NDDS_Transport_Plugin* NDDS_Transport_UDPv4_new (
const struct NDDS_Transport_UDPv4_Property_t * property_in)
NDDS_Transport_Plugin* NDDS_Transport_UDPv4_new (
const struct NDDS_Transport_UDPv4_Property_t * property_in)
NDDS_Transport_Plugin* NDDS_Transport_Shmem_new (
const struct NDDS_Transport_Shmem_Property_t * property_in)
property_in
Desired behavior of this transport. May be NULL for default properties.
For details on using these functions, please see the online (HTML) documentation.
Your application may create and register multiple instances of these transport plugins
with RTI Data Distribution Service. This may be done to partition the network interfaces
across multiple RTI Data Distribution Service domains. However, note that the underly-
ing transport, the operating system's IP layer, is still a "singleton." For example, if a uni-
cast transport has already bound to a port, and another unicast transport tries to bind to
the same port, the second attempt will fail.
13.5 Setting Builtin Transport Properties of the Default Transport
Instance—get/set_builtin_transport_properties()
Perhaps you want to use one of the builtin transports, but need to modify the proper-
ties. (For default values, please see the online/HTML documentation.) Used together,
the two operations below allow you to customize properties of the builtin transport
when it is implicitly registered (see Section 13.1).
Note: Another way to change the properties is with the Property QosPolicy, see
Section 13.6. Changing properties with the Property QosPolicy will overwrite the prop-
erties set by calling set_builtin_transport_property().
DDS_ReturnCode_t NDDSTransportSupport::get_builtin_transport_property
(DDSDomainParticipant * participant_in,
DDS_TransportBuiltinKind builtin_transport_kind_in,
struct NDDS_Transport_Property_t &builtin_transport_property_inout)
DDS_ReturnCode_t NDDSTransportSupport::set_builtin_transport_property
(DDSDomainParticipant * participant_in,
DDS_TransportBuiltinKind builtin_transport_kind_in,
const struct NDDS_Transport_Property_t & builtin_transport_property_in)

Chapter 13
13-6
participant_in
A valid non-NULL DomainParticipant that has not been enabled. If the
DomainParticipant if already enabled when this operation is called, your transport
property changes will not be reflected in the transport used by the DomainPartici-
pant's DataWriters and DataReaders.
builtin_transport_kind_in The builtin transport kind for which to specify the properties.
builtin_transport_property_inout (Used by the “get” operation only.) The storage area
where the retrieved property will be output. The specific type required by the
builtin_transport_kind_in must be used.
builtin_transport_property_in (Used by the “set” operation only.) The new transport
property that will be used to the create the builtin transport plugin. The specific
type required by the builtin_transport_kind_in must be used.
In this example, we want to use the builtin UDPv4 transport, but with modified proper-
ties.
/* Before reaching this point, create a disabled DomainParticipant */
struct NDDS_Transport_UDPv4_Property_t property =
NDDS_TRANSPORT_UDPV4_PROPERTY_DEFAULT;
if (NDDSTransportSupport::get_builtin_transport_property(
participant, DDS_TRANSPORTBUILTIN_UDPv4,
(struct NDDS_Transport_Property_t&)property) !=
DDS_RETCODE_OK) {
printf("**Error: get builtin transport property\n");
}
/* Make your desired changes here */
/* For example, to increase the UDPv4 max msg size to 64K: */
property.parent.message_size_max = 65535;
property.recv_socket_buffer_size = 65535;
property.send_socket_buffer_size = 65535;
if (NDDSTransportSupport::set_builtin_transport_property(
participant, DDS_TRANSPORTBUILTIN_UDPv4,
(struct NDDS_Transport_Property_t&)property)
!= DDS_RETCODE_OK) {
printf("***Error: set builtin transport property\n");
}
/* Enable the participant to turn on communications with other
participants in the domain using the new properties for the
automatically registered builtin transport plugins.*/
if (entity->enable() != DDS_RETCODE_OK) {
printf("***Error: failed to enable entity\n");
}

13.6 Setting Builtin Transport Properties with the PropertyQosPolicy
13-7
13. Transport Plugins
Note: Builtin transport property changes will have no effect after the builtin transport
has been registered. The builtin transports are implicitly registered when (a) the
DomainParticipant is enabled, (b) the first DataWriter/DataReader is created, or (c) you
lookup a builtin DataReader, whichever happens first.
Note: If message_size_max is increased from the default for any of the built-in trans-
ports, or if custom transports are used, then the buffer_size in the RECEIVER_POOL
QosPolicy (DDS Extension) (Section 8.5.7) of the DomainParticipant should also be
increased accordingly.
13.6 Setting Builtin Transport Properties with the
PropertyQosPolicy
The PROPERTY QosPolicy (DDS Extension) (Section 6.5.15) allows you to set name/
value pairs of data and attach them to an entity, such as a DomainParticipant.
To assign properties, use the add_property() operation:
DDS_ReturnCode_t DDSPropertyQosPolicyHelper::add_property
(DDS_PropertyQosPolicy policy,
const char * name,
const char * value,
DDS_Boolean propagate)
For more information on add_property() and the other operations in the DDSProperty-
QosPolicyHelper class, please see Table 6.48, “PropertyQoSPolicyHelper Operations,”
on page 6-139, as well as the online (HTML) documentation.
The ‘name’ part of the name/value pairs is a predefined string. The property names for
the builtin transports are described in these tables:
❏ Table 13.2, “Properties for the Builtin UDPv4 Transport,” on page 13-8
❏ Table 13.3, “Properties for the Builtin UDPv6 Transport,” on page 13-15
❏ Table 13.4, “Properties for the Builtin Shared Memory Transport,” on page 13-21
See also:
❏ “Notes Regarding Loopback and Shared Memory” (Section 13.6.1 on page 13-25)
❏ “Setting the Maximum Gather-Send Buffer Count for UDPv4 and UDPv6” (Sec-
tion 13.6.2 on page 13-25)
Chapter 13
13-8
Note: Changing properties with the PROPERTY QosPolicy (DDS Extension) (Section
6.5.15) will overwrite any properties set by calling set_builtin_transport_property().
Table 13.2 Properties for the Builtin UDPv4 Transport
Property Name
(prefix with
‘dds.transport.UDPv4.builtin.’)
Property Value Description
parent.address_bit_count
Number of bits in a 16-byte address that are used by the transport.
Should be between 0 and 128.
For example, for an address range of 0-255, the address_bit_count
should be set to 8. For the range of addresses used by IPv4 (4 bytes), it
should be set to 32.
parent.properties_bitmap
A bitmap that defines various properties of the transport to the RTI
Data Distribution Service core.
Currently, the only property supported is whether or not the transport
plugin will always loan a buffer when RTI Data Distribution Service
tries to receive a message using the plugin. This is in support of a
zero-copy interface.
parent.
gather_send_buffer_count_max
Specifies the maximum number of buffers that RTI Data Distribution
Service can pass to the send() method of a transport plugin.
The transport plugin send() API supports a gather-send concept,
where the send() call can take several discontiguous buffers, assemble
and send them in a single message. This enables RTI Data Distribution
Service to send a message from parts obtained from different sources
without first having to copy the parts into a single contiguous buffer.
However, most transports that support a gather-send concept have an
upper limit on the number of buffers that can be gathered and sent.
Setting this value will prevent RTI Data Distribution Service from try-
ing to gather too many buffers into a send call for the transport
plugin.
RTI Data Distribution Service requires all transport-plugin implementa-
tions to support a gather-send of least a minimum number of buffers.
This minimum number is
NDDS_TRANSPORT_PROPERTY_GATHER_SEND_BUFFER_COUNT_
MIN
.
See Setting the Maximum Gather-Send Buffer Count for UDPv4 and
UDPv6 (Section 13.6.2).

13.6 Setting Builtin Transport Properties with the PropertyQosPolicy
13-9
13. Transport Plugins
parent.message_size_max
The maximum size of a message in bytes that can be sent or received
by the transport plugin.
This value must be set before the transport plugin is registered, so that
RTI Data Distribution Service can properly use the plugin.
If you set this higher than the default, then the DomainParticipant’s
ReceiverPoolQosPolicy’s buffer_size should also be changed.
parent.allow_interfaces_list
A list of strings, each identifying a range of interface addresses.
Interfaces must be specified as comma-separated strings, with each
comma delimiting an interface.
For example, the following are acceptable strings
192.168.1.1
192.168.1.*
192.168.*
192.*
If the list is non-empty, this "white" list is applied before the par-
ent.deny_interfaces_list list. The DomainParticipant will use the result-
ing list of interfaces to inform its remote participant(s) about which
unicast addresses may be used to contact the DomainParticipant.
The resulting list restricts reception to a particular set of interfaces for
unicast UDP. Multicast output will still be sent and may be received
over the interfaces in the list (if multicast is supported on the plat-
form).
You must manage the memory of the list. The memory may be freed
after the DomainParticipant is deleted.
Table 13.2 Properties for the Builtin UDPv4 Transport
Property Name
(prefix with
‘dds.transport.UDPv4.builtin.’)
Property Value Description
Note:
If two transports have different settings for message_size_max ,
such that fragmentation is required for one and not the other, the
need for fragmentation may not be applied correctly and sam-
ples may be lost. To avoid this issue, set message_size_max to
the same value in each transport.
Chapter 13
13-10
parent.deny_interfaces_list
A list of strings, each identifying a range of interface addresses. If the
list is non-empty, deny the use of these interfaces.
Interfaces must be specified as comma-separated strings, with each
comma delimiting an interface.
For example, the following are acceptable strings:
192.168.1.1
192.168.1.*
192.168.*
192.*
This "black" list is applied after the parent.allow_interfaces_list list
and filters out the interfaces that should not be used for receiving data.
The resulting list restricts reception to a particular set of interfaces for
unicast UDP. Multicast output will still be sent and may be received
over the interfaces in the list (if multicast is supported on the plat-
form).
You must manage the memory of the list. The memory may be freed
after the DomainParticipant is deleted.
parent.
allow_multicast_interfaces_list
A list of strings, each identifying a range of interface addresses. If the
list is non-empty, allow the use of multicast only on these interfaces. If
the list is empty, allow the use of all the allowed interfaces.
Interfaces must be specified as comma-separated strings, with each
comma delimiting an interface.
This list sub-selects from the allowed interfaces that are obtained after
applying the parent.allow_interfaces_list "white" list and the par-
ent.deny_interfaces_list "black" list. From that resulting list, parent.
deny_multicast_interfaces_list is applied. Multicast output will be
sent and may be received over the interfaces in the resulting list (if
multicast is supported on the platform).
If this list is empty, all the allowed interfaces may potentially be used
for multicast.
You must manage the memory of the list. The memory may be freed
after the DomainParticipant is deleted.
Table 13.2 Properties for the Builtin UDPv4 Transport
Property Name
(prefix with
‘dds.transport.UDPv4.builtin.’)
Property Value Description

13.6 Setting Builtin Transport Properties with the PropertyQosPolicy
13-11
13. Transport Plugins
parent.
deny_multicast_interfaces_list
A list of strings, each identifying a range of interface addresses. If the
list is non-empty, deny the use of those interfaces for multicast.
Interfaces should be specified as comma-separated strings, with each
comma delimiting an interface.
This "black" list is applied after the parent.
allow_multicast_interfaces_list list and filters out the interfaces that
should not be used for multicast. The final resulting list will be those
interfaces that—if multicast is available—will be used for multicast
sends.
You must manage the memory of the list. The memory may be freed
after the DomainParticipant is deleted.
send_socket_buffer_size
Size in bytes of the send buffer of a socket used for sending. On most
operating systems, setsockopt() will be called to set the SENDBUF to
the value of this parameter.
This value must be greater than or equal to the property,
parent.message_size_max.
The maximum value is operating system-dependent.
If set to
NDDS_TRANSPORT_UDPV4_SOCKET_BUFFER_SIZE_OS_DEFAULT,
then setsockopt() (or equivalent) will not be called to size the send
buffer of the socket.
recv_socket_buffer_size
Size in bytes of the receive buffer of a socket used for receiving.
On most operating systems, setsockopt() will be called to set the
RECVBUF to the value of this parameter.
This value must be greater than or equal to the property, par-
ent.message_size_max. The maximum value is operating system-
dependent.
Default:
NDDS_TRANSPORT_UDPV4_MESSAGE_SIZE_MAX_DEFAULT.
If set to
NDDS_TRANSPORT_UDPV4_SOCKET_BUFFER_SIZE_OS_DEFAULT,
then setsockopt() (or equivalent) will not be called to size the receive
buffer of the socket.
Table 13.2 Properties for the Builtin UDPv4 Transport
Property Name
(prefix with
‘dds.transport.UDPv4.builtin.’)
Property Value Description

Chapter 13
13-12
unicast_enabled
Allows the transport plugin to use unicast UDP for sending and
receiving. By default, it will be turned on. Also by default, it will use
all the allowed network interfaces that it finds up and running when
the plugin is instanced.
Can be 1 (enabled) or 0 (disabled).
multicast_enabled
Allows the transport plugin to use multicast for sending and receiv-
ing. You can turn multicast on or off for this plugin. The default is that
multicast is on and the plugin will use the all network interfaces
allowed for multicast that it finds up and running when the plugin is
instanced.
Can be 1 (enabled) or 0 (disabled).
multicast_ttl
Value for the time-to-live parameter for all multicast sends using this
plugin. This is used to set the TTL of multicast packets sent by this
transport plugin.
multicast_loopback_disabled
Prevents the transport plugin from putting multicast packets onto the
loopback interface.
If disabled, then when sending multicast packets, do not put a copy
on the loopback interface. This will prevent other applications on the
same node (including itself) from receiving those packets.
This is set to 0 by default. So multicast loopback is enabled. Turning
off multicast loopback (set to 1) may result in minor performance
gains when using multicast.
Note: Windows CE does not support multicast loopback. This field is
ignored for Windows CE targets.
Table 13.2 Properties for the Builtin UDPv4 Transport
Property Name
(prefix with
‘dds.transport.UDPv4.builtin.’)
Property Value Description

13.6 Setting Builtin Transport Properties with the PropertyQosPolicy
13-13
13. Transport Plugins
ignore_loopback_interface
Prevents the transport plugin from using the IP loopback interface.
Three values are allowed:
0: Forces local traffic to be sent over loopback, even if a more efficient
transport (such as shared memory) is installed (in which case traffic
will be sent over both transports).
1: Disables local traffic via this plugin. The IP loopback interface will
not be used, even if no NICs are discovered. This is useful when
you want applications running on the same node to use a more effi-
cient transport (such as shared memory) instead of the IP loopback.
-1: Automatic. Lets RTI Data Distribution Service decide among the
above two choices. If a shared memory transport plugin is available
for local traffic, the effective value is 1 (i.e., disable UPV4 local traf-
fic). Otherwise, the effective value is 0, i.e., use UDPv4 for local traf-
fic also.
ignore_nonrunning_interfaces
Prevents the transport plugin from using a network interface that is
not reported as RUNNING by the operating system.
The transport checks the flags reported by the operating system for
each network interface upon initialization. An interface which is not
reported as UP will not be used. This property allows the same check
to be extended to the IFF_RUNNING flag implemented by some
operating systems. The RUNNING flag is defined to mean that "all
resources are allocated", and may be off if there is no link detected,
e.g., the network cable is unplugged. Two values are allowed:
0: Do not check the RUNNING flag when enumerating interfaces, just
make sure the interface is UP.
1: Check the flag when enumerating interfaces, and ignore those that
are not reported as RUNNING. This can be used on some operating
systems to cause the transport to ignore interfaces that are enabled
but not connected to the network.
Table 13.2 Properties for the Builtin UDPv4 Transport
Property Name
(prefix with
‘dds.transport.UDPv4.builtin.’)
Property Value Description
Chapter 13
13-14
no_zero_copy
Prevents the transport plugin from doing a zero copy.
By default, this plugin will use the zero copy on OSs that offer it.
While this is good for performance, it may sometime tax the OS
resources in a manner that cannot be overcome by the application.
The best example is if the hardware/device driver lends the buffer to
the application itself. If the application does not return the loaned buf-
fers soon enough, the node may error or malfunction. In case you can-
not reconfigure the hardware, device driver, or the OS to allow the
zero-copy feature to work for your application, you may have no
choice but to turn off zero-copy.
By default this is set to 0, so RTI Data Distribution Service will use the
zero-copy API if offered by the OS.
send_blocking
Controls the blocking behavior of send sockets. CHANGING THIS
FROM THE DEFAULT CAN CAUSE SIGNIFICANT PERFOR-
MANCE PROBLEMS. Currently two values are defined:
NDDS_TRANSPORT_UDPV4_BLOCKING_ALWAYS: Sockets are
blocking (default socket options for Operating System).
NDDS_TRANSPORT_UDPV4_BLOCKING_NEVER: Sockets are
modified to make them non-blocking. This is not a supported con-
figuration and may cause significant performance problems.
transport_priority_mask
Mask for the transport priority field. This is used in conjunction with
transport_priority_mapping_low and
transport_priority_mapping_high to define the mapping from DDS
transport priority to the IPv4 TOS field. Defines a contiguous region
of bits in the 32-bit transport priority value that is used to generate
values for the IPv4 TOS field on an outgoing socket.
For example, the value 0x0000ff00 causes bits 9-16 (8 bits) to be used
in the mapping. The value will be scaled from the mask range (0x0000
- 0xff00 in this case) to the range specified by low and high.
If the mask is set to zero, then the transport will not set IPv4 TOS for
send sockets.
Table 13.2 Properties for the Builtin UDPv4 Transport
Property Name
(prefix with
‘dds.transport.UDPv4.builtin.’)
Property Value Description

13.6 Setting Builtin Transport Properties with the PropertyQosPolicy
13-15
13. Transport Plugins
transport_priority_mapping_low Sets the low and high values of the output range to IPv4 TOS.
These values are used in conjunction with transport_priority_mask to
define the mapping from DDS transport priority to the IPv4 TOS field.
Defines the low and high values of the output range for scaling.
Note that IPv4 TOS is generally an 8-bit value.
transport_priority_mapping_high
Table 13.3 Properties for the Builtin UDPv6 Transport
Property Name (prefix with
‘dds.transport.UDPv6.builtin.’)
Description
parent.address_bit_count
Number of bits in a 16-byte address that are used by the transport.
Should be between 0 and 128.
For example, for an address range of 0-255, this address_bit_count
should be set to 8. For the range of addresses used by IPv4 (4 bytes), it
should be set to 32.
parent.properties_bitmap
A bitmap that defines various properties of the transport to the RTI
Data Distribution Service core.
Currently, the only property supported is whether or not the transport
plugin will always loan a buffer when RTI Data Distribution Service
tries to receive a message using the plugin. This is in support of a
zero-copy interface.
Table 13.2 Properties for the Builtin UDPv4 Transport
Property Name
(prefix with
‘dds.transport.UDPv4.builtin.’)
Property Value Description

Chapter 13
13-16
parent.gather_send_buffer_
count_max
Specifies the maximum number of buffers that RTI Data Distribution
Service can pass to the send() method of a transport plugin.
The transport plugin send() API supports a gather-send concept,
where the send() call can take several discontiguous buffers, assemble
and send them in a single message. This enables RTI Data Distribution
Service to send a message from parts obtained from different sources
without first having to copy the parts into a single contiguous buffer.
However, most transports that support a gather-send concept have an
upper limit on the number of buffers that can be gathered and sent.
Setting this value will prevent RTI Data Distribution Service from try-
ing to gather too many buffers into a send call for the transport
plugin.
RTI Data Distribution Service requires all transport-plugin implementa-
tions to support a gather-send of least a minimum number of buffers.
This minimum number is defined as
NDDS_TRANSPORT_PROPERTY_GATHER_SEND_BUFFER_COUNT_
MIN
.
parent.message_size_max
The maximum size of a message in bytes that can be sent or received
by the transport plugin.
This value must be set before the transport plugin is registered, so that
RTI Data Distribution Service can properly use the plugin.
If you set this higher than the default, then the DomainParticipant’s
ReceiverPoolQosPolicy’s buffer_size should also be changed.
See also: Note on page 13-9.
parent.allow_interfaces_list
A list of strings, each identifying a range of interface addresses.
Interfaces must be specified as comma-separated strings, with each
comma delimiting an interface.
If the list is non-empty, this "white" list is applied before the par-
ent.deny_interfaces_list list. The DomainParticipant will use the result-
ing list of interfaces to inform its remote participant(s) about which
unicast addresses may be used to contact the DomainParticipant.
The resulting list restricts reception to a particular set of interfaces for
unicast UDP. Multicast output will still be sent and may be received
over the interfaces in the list (if multicast is supported on the plat-
form).
You must manage the memory of the list. The memory may be freed
after the DomainParticipant is deleted.
Table 13.3 Properties for the Builtin UDPv6 Transport
Property Name (prefix with
‘dds.transport.UDPv6.builtin.’)
Description

13.6 Setting Builtin Transport Properties with the PropertyQosPolicy
13-17
13. Transport Plugins
parent.deny_interfaces_list
A list of strings, each identifying a range of interface addresses. If the
list is non-empty, deny the use of these interfaces.
Interfaces must be specified as comma-separated strings, with each
comma delimiting an interface.
This "black" list is applied after the parent.allow_interfaces_list list
and filters out the interfaces that should not be used.
The resulting list restricts reception to a particular set of interfaces for
unicast UDP. Multicast output will still be sent and may be received
over the interfaces in the list (if multicast is supported on the plat-
form).
You must manage the memory of the list. The memory may be freed
after the DomainParticipant is deleted.
parent.
allow_multicast_interfaces_list
A list of strings, each identifying a range of interface addresses. If the
list is non-empty, allow the use of multicast only these interfaces; oth-
erwise allow the use of all the allowed interfaces.
Interfaces must be specified as comma-separated strings, with each
comma delimiting an interface.
This list sub-selects from the allowed interfaces that are obtained after
applying the parent.allow_interfaces_list "white" list and the par-
ent.deny_interfaces_list "black" list. Finally, the parent.
deny_multicast_interfaces_list is applied. Multicast output will be
sent and may be received over the interfaces in the resulting list (if
multicast is supported on the platform).
If this list is empty, all the allowed interfaces may potentially be used
for multicast.
You must manage the memory of the list. The memory may be freed
after the DomainParticipant is deleted.
Table 13.3 Properties for the Builtin UDPv6 Transport
Property Name (prefix with
‘dds.transport.UDPv6.builtin.’)
Description

Chapter 13
13-18
parent.
deny_multicast_interfaces_list
A list of strings, each identifying a range of interface addresses. If the
list is non-empty, deny the use of those interfaces for multicast.
Interfaces should be specified as comma-separated strings, with each
comma delimiting an interface.
This "black" list is applied after the parent.
allow_multicast_interfaces_list list and filters out the interfaces that
should not be used for multicast. Multicast output will be sent and
may be received over the interfaces in the resulting list (if multicast is
supported on the platform).
You must manage the memory of the list. The memory may be freed
after the DomainParticipant is deleted.
send_socket_buffer_size
Size in bytes of the send buffer of a socket used for sending.
On most operating systems, setsockopt() will be called to set the
SENDBUF to the value of this parameter.
This value must be greater than or equal to par-
ent.message_size_max. The maximum value is operating system-
dependent.
If set to
NDDS_TRANSPORT_UDPV6_SOCKET_BUFFER_SIZE_OS_DEFAULT,
then setsockopt() (or equivalent) will not be called to size the send
buffer of the socket.
recv_socket_buffer_size
Size in bytes of the receive buffer of a socket used for receiving.
On most operating systems, setsockopt() will be called to set the
RECVBUF to the value of this parameter.
This value must be greater than or equal to
parent.message_size_max. The maximum value is operating system-
dependent.
If set to
NDDS_TRANSPORT_UDPV6_SOCKET_-BUFFER_SIZE_OS_DEFAULT,
then setsockopt() (or equivalent) will not be called to size the receive
buffer of the socket.
unicast_enabled
Allows the transport plugin to use unicast UDP for sending and
receiving. By default, it will be turned on (1). Also by default, it will
use all the allowed network interfaces that it finds up and running
when the plugin is instanced.
Can be 1 (enabled) or 0 (disabled).
Table 13.3 Properties for the Builtin UDPv6 Transport
Property Name (prefix with
‘dds.transport.UDPv6.builtin.’)
Description

13.6 Setting Builtin Transport Properties with the PropertyQosPolicy
13-19
13. Transport Plugins
multicast_enabled
Allows the transport plugin to use multicast for sending and receiv-
ing.
You can turn multicast UDP on or off for this plugin. By default, it will
be turned on (1). Also by default, it will use the all network interfaces
allowed for multicast that it finds up and running when the plugin is
instanced.
Can be 1 (enabled) or 0 (disabled).
multicast_ttl
Value for the time-to-live parameter for all multicast sends using this
plugin.
This is used to set the TTL of multicast packets sent by this transport
plugin
multicast_loopback_disabled
Prevents the transport plugin from putting multicast packets onto the
loopback interface.
If disabled, then when sending multicast packets, RTI Data Distribu-
tion Service will not put a copy on the loopback interface. This will pre-
vent applications on the same node (including itself) from receiving
those packets.
This is set to 0 by default, meaning multicast loopback is enabled. Dis-
abling multicast loopback off (setting this value to 1) may result in
minor performance gains when using multicast.
Note: Windows CE does not support multicast loopback. This field is
ignored for Windows CE targets.
ignore_loopback_interface
Prevents the transport plugin from using the IP loopback interface.
Three values are allowed:
0: Enable local traffic via this plugin. This plugin will only use and
report the IP loopback interface if there are no other network inter-
faces (NICs) up on the system.
1: Disable local traffic via this plugin. Do not use the IP loopback
interface even if no NICs are discovered. This is useful when you
want applications running on the same node to use a more efficient
plugin like Shared Memory instead of the IP loopback.
-1: Automatic. Lets RTI Data Distribution Service decide among the
above two choices. If a shared memory transport plugin is available
for local traffic, the effective value is 1 (i.e., disable UDPv4 local
traffic). Otherwise, the effective value is 0, i.e., use UDPv4 for local
traffic also.
Table 13.3 Properties for the Builtin UDPv6 Transport
Property Name (prefix with
‘dds.transport.UDPv6.builtin.’)
Description

Chapter 13
13-20
ignore_nonrunning_interfaces
Prevents the transport plugin from using a network interface that is
not reported as RUNNING by the operating system.
The transport checks the flags reported by the operating system for
each network interface upon initialization. An interface which is not
reported as UP will not be used. This property allows the same check
to be extended to the IFF_RUNNING flag implemented by some oper-
ating systems. The RUNNING flag is defined to mean that "all
resources are allocated", and may be off if there is no link detected,
e.g., the network cable is unplugged. Two values are allowed:
0: Do not check the RUNNING flag when enumerating interfaces, just
make sure the interface is UP.
1: Check the flag when enumerating interfaces, and ignore those that
are not reported as RUNNING. This can be used on some operating
systems to cause the transport to ignore interfaces that are enabled
but not connected to the network.
no_zero_copy
Prevents the transport plugin from doing a zero copy.
By default, this plugin will use the zero copy on OSs that offer it.
While this is good for performance, it may sometime tax the OS
resources in a manner that cannot be overcome by the application.
The best example is if the hardware/device driver lends the buffer to
the application itself. If the application does not return the loaned buf-
fers soon enough, the node may error or malfunction. In case you can-
not reconfigure the H/W, device driver, or the OS to allow the zero-
copy feature to work for your application, you may have no choice
but to turn off zero-copy.
By default this is set to 0, so RTI Data Distribution Service will use the
zero-copy API if offered by the OS.
send_blocking
Controls the blocking behavior of send sockets. CHANGING THIS
FROM THE DEFAULT CAN CAUSE SIGNIFICANT PERFOR-
MANCE PROBLEMS. Currently two values are defined:
NDDS_TRANSPORT_UDPV4_BLOCKING_ALWAYS: Sockets are
blocking (default socket options for Operating System).
NDDS_TRANSPORT_UDPV4_BLOCKING_NEVER: Sockets are
modified to make them non-blocking. This is not a supported con-
figuration and may cause significant performance problems.
Table 13.3 Properties for the Builtin UDPv6 Transport
Property Name (prefix with
‘dds.transport.UDPv6.builtin.’)
Description

13.6 Setting Builtin Transport Properties with the PropertyQosPolicy
13-21
13. Transport Plugins
enable_v4mapped
Specifies whether the UDPv6 transport will process IPv4 addresses.
Set this to 1 to turn on processing of IPv4 addresses. Note that this
may make it incompatible with use of the UDPv4 transport within the
same domain participant.
transport_priority_mask
Sets a mask for use of transport priority field.
If transport priority mapping is supported on the platform
a
, this mask
is used in conjunction with transport_priority_mapping_low and
transport_priority_mapping_high to define the mapping from the
DDS transport priority TRANSPORT_PRIORITY QosPolicy (Section
6.5.19) to the IPv6 TCLASS field.
Defines a contiguous region of bits in the 32-bit transport priority
value that is used to generate values for the IPv6 TCLASS field on an
outgoing socket.
For example, the value 0x0000ff00 causes bits 9-16 (8 bits) to be used in
the mapping. The value will be scaled from the mask range (0x0000 -
0xff00 in this case) to the range specified by low and high.
If the mask is set to zero, then the transport will not set IPv6 TCLASS
for send sockets.
transport_priority_mapping_low Sets the low and high values of the output range to IPv6 TCLASS.
These values are used in conjunction with transport_priority_mask to
define the mapping from DDS transport priority to the IPv6 TCLASS
field. Defines the low and high values of the output range for scaling.
Note that IPv6 TCLASS is generally an 8-bit value.
transport_priority_mapping_high
a. Please refer to the Platform Notes to find out if the transport priority is supported on a specific platform.
Table 13.3
Properties for the Builtin UDPv6 Transport
Property Name (prefix with
‘dds.transport.UDPv6.builtin.’)
Description
Table 13.4 Properties for the Builtin Shared Memory Transport
Property Name
(prefix with
‘dds.transport.shmem.builtin.’)
Property Value Description
parent.address_bit_count
Number of bits in a 16-byte address that are used by the transport.
Should be between 0 and 128.
For example, for an address range of 0-255, this address_bit_count
should be set to 8. For the range of addresses used by IPv4 (4 bytes), it
should be set to 32.

Chapter 13
13-22
parent.properties_bitmap
A bitmap that defines various properties of the transport to the RTI
Data Distribution Service core.
Currently, the only property supported is whether or not the transport
plugin will always loan a buffer when RTI Data Distribution Service
tries to receive a message using the plugin. This is in support of a
zero-copy interface.
parent.gather_send_buffer_
count_max
Specifies the maximum number of buffers that RTI Data Distribution
Service can pass to the send() method of a transport plugin.
The transport plugin send() API supports a gather-send concept,
where the send() call can take several discontiguous buffers, assemble
and send them in a single message. This enables RTI Data Distribution
Service to send a message from parts obtained from different sources
without first having to copy the parts into a single contiguous buffer.
However, most transports that support a gather-send concept have an
upper limit on the number of buffers that can be gathered and sent.
Setting this value will prevent RTI Data Distribution Service from try-
ing to gather too many buffers into a send call for the transport
plugin.
RTI Data Distribution Service requires all transport-plugin implementa-
tions to support a gather-send of least a minimum number of buffers.
This minimum number is
NDDS_TRANSPORT_PROPERTY_GATHER_SEND_BUFFER_COU
NT_MIN.
parent.message_size_max
The maximum size of a message in bytes that can be sent or received
by the transport plugin.
This value must be set before the transport plugin is registered, so that
RTI Data Distribution Service can properly use the plugin.
If you set this higher than the default, then the DomainParticipant’s
ReceiverPoolQosPolicy’s buffer_size should also be changed.
See also: Note on page 13-9.
Table 13.4 Properties for the Builtin Shared Memory Transport
Property Name
(prefix with
‘dds.transport.shmem.builtin.’)
Property Value Description

13.6 Setting Builtin Transport Properties with the PropertyQosPolicy
13-23
13. Transport Plugins
parent.allow_interfaces_list
Not applicable to the Shared Memory Transport
parent.deny_interfaces_list
parent.
allow_multicast_interfaces_list
parent.
deny_multicast_interfaces_list
received_message_count_max
Number of messages that can be buffered in the receive queue. This is
the maximum number of messages that can be buffered in a RecvRe-
source of the Transport Plugin. This does not guarantee that the Trans-
port-Plugin will actually be able to buffer
received_message_count_max messages of the maximum size set in
parent.message_size_max.
The total number of bytes that can be buffered for a RecvResource is
actually controlled by receive_buffer_size.
Table 13.4 Properties for the Builtin Shared Memory Transport
Property Name
(prefix with
‘dds.transport.shmem.builtin.’)
Property Value Description

Chapter 13
13-24
receive_buffer_size
The total number of bytes that can be buffered in the receive queue.
This number controls how much memory is allocated by the plugin
for the receive queue (on a per RecvResource basis). The actual num-
ber of bytes allocated is:
size = receive_buffer_size + message_size_max +
received_message_count_max * fixedOverhead
where fixedOverhead is some small number of bytes used by the queue
data structure.
If receive_buffer_size <
message_size_max * received_message_count_max,
then the transport plugin will not be able to store
received_message_count_max messages of size message_size_max.
If receive_buffer_size >
message_size_max * received_message_count_max,
then there will be memory allocated that cannot be used by the plugin
and thus wasted.
To optimize memory usage, specify a receive queue size less than that
required to hold the maximum number of messages which are all of
the maximum size.
In most situations, the average message size may be far less than the
maximum message size. So for example, if the maximum message size
is 64K bytes, and you configure the plugin to buffer at least 10 mes-
sages, then 640K bytes of memory would be needed if all messages
were 64K bytes. Should this be desired, then receive_buffer_size
should be set to 640K bytes.
However, if the average message size is only 10K bytes, then you
could set the receive_buffer_size to 100K bytes. This allows you to
optimize the memory usage of the plugin for the average case and yet
allow the plugin to handle the extreme case.
The queue will always be able to hold 1 message of
message_size_max bytes, regardless of the value of
receive_buffer_size.
Table 13.4 Properties for the Builtin Shared Memory Transport
Property Name
(prefix with
‘dds.transport.shmem.builtin.’)
Property Value Description

13.6 Setting Builtin Transport Properties with the PropertyQosPolicy
13-25
13. Transport Plugins
13.6.1 Notes Regarding Loopback and Shared Memory
By default, RTI Data Distribution Service uses shared memory to communicate with other
DomainParticipants on the same node, and disables local traffic over the UDPv4 or
UPDv6 loopback interface. Thus, by default, an RTI Data Distribution Service application
with shared memory enabled will not communicate with other applications on the same
node that don’t have shared memory enabled.
For example, suppose you have three RTI Data Distribution Service applications on the
same node. Shared memory is enabled on Applications A and B, but disabled on Appli-
cation C. In this scenario, A and B will communicate with each other, but they will not
communicate with C.
You can change this behavior by setting the "ignore_loopback_interface" field of the
UDPv4 transport properties to 0 on Applications A and B. This will force DomainPartici-
pants with shared memory enabled to also communicate over UDPv4 or UDPv6 loop-
back (and thus find Application C without using shared memory). Alternatively, you
can disable shared memory on A and B via the TransportBuiltinQosPolicy.
13.6.2 Setting the Maximum Gather-Send Buffer Count for UDPv4 and UDPv6
To minimize memory copies, RTI Data Distribution Service uses the "gather send" API
that may be available on the transport.
Some operating systems limit the number of gather buffers that can be given to the
gather-send function. This limits RTI Data Distribution Service's ability to concatenate
multiple samples into a single network message. An example is the UDP transport's
sendmsg() call, which on some OSs (such as Solaris) can only take 16 gather buffers,
limiting the number of samples that can be concatenated to five or six.
To match this limitation, RTI Data Distribution Service sets the UDPv4 and UDPv6 trans-
port plug-ins' gather_send_buffer_count_max to 16 by default for all operating sys-
tems. This field is part of the NDDS_Transport_Property_t structure.
❏ On VxWorks 5.5 operating systems, gather_send_buffer_count_max can be set
as high as 63.
❏ On Windows and INTEGRITY operating systems,
gather_send_buffer_count_max can be set as high as 128.
❏ On most other operating systems, gather_send_buffer_count_max can be set as
high as 16.
If you are using an OS that allows more than 16 gather buffers for a sendmsg() call, you
may increase the UDPv4 or UDPv6 transport plug-in's gather_send_buffer_count_max
from the default up to your OS's limit (but no higher than 128).

Chapter 13
13-26
For example, if your OS imposes a limit of 64 gather buffers, you may increase the
gather_send_buffer_count_max up to 64. However, if your OS's gather-buffer limit is
1024, you may only increase the gather_send_buffer_count_max up to 128.
By changing gather_send_buffer_count_max, you can increase performance in the fol-
lowing situations:
❏ When a DataWriter is sending multiple packets to a DataReader either because the
DataReader is a late-joiner and needs to catch up, or because several packets were
dropped and need to be resent. Changing the setting will help when the
DataWriter needs to send or resend more than five or six packets at a time.
❏ If your application has more than five or six DataWriters or DataReaders in a par-
ticipant. (In this case, the change will make the discovery process more efficient.)
❏ When using an asynchronous DataWriter, samples are sent asynchronously by a
separate thread. Samples may not be sent immediately, but may be queued
instead, depending on the settings of the associated FlowController. If multiple
samples in the queue must be sent to the same destination, they will be coalesced
into as few network packets as possible. The number of samples that can be put
in a single message is directly proportional to gather_send_buffer_count_max.
Therefore, by maximizing gather_send_buffer_count_max, you can minimize
the number of packets on the wire.
13.7 Installing Additional Builtin Transport Plugins with
register_transport()
After you create an instance of a transport plugin (see Section 13.4) , you have to register
it.
The builtin transports (UDPv4, UDPv6, and Shared Memory) are implicitly registered
by default (if they are enabled via the TRANSPORT_BUILTIN QosPolicy (DDS Exten-
sion) (Section 8.5.8)). Therefore, you only need to explicitly register a builtin transport if
you want an extra instance of it (suppose you want two UDPv4 transports, one with
special settings).
The register_transport() operation registers a transport plugin for use with a Domain-
Participant and assigns it a network address. (Note: this operation is only available in the
the APIs other than Java or .NET. If you are using Java or .NET, use the Property
QosPolicy to install additional transport plugins.)

13.7 Installing Additional Builtin Transport Plugins with register_transport()
13-27
13. Transport Plugins
NDDS_Transport_Handle_t NDDSTransportSupport::register_transport
(DDSDomainParticipant * participant_in,
NDDS_Transport_Plugin * transport_in,
const DDS_StringSeq & aliases_in,
const NDDS_Transport_Address_t & network_address_in)
participant_in
A non-NULL, disabled DomainParticipant.
transport_in A non-NULL transport plugin that is currently not registered with
another DomainParticipant.
aliases_in A non-NULL sequence of strings used as aliases to refer to the transport
plugin symbolically. The transport plugin will be "available for use" to an Entity
contained in the DomainParticipant, if the transport alias list associated with the
Entity contains one of these transport aliases. An empty alias list represents a
WILDCARD and matches ALL aliases. See Transport Aliases (Section 13.7.2).
network_address_in The network address at which to register this transport plugin.
The least significant transport_in.property.address_bit_count will be truncated.
The remaining bits are the network address of the transport plugin. See Transport
Network Addresses (Section 13.7.3).
Note: You must ensure that the transport plugin instance is only used by one Domain-
Participant at a time. See Section 13.7.1.
Upon success, a valid non-NIL transport handle is returned, representing the associa-
tion between the DomainParticipant and the transport plugin. If the transport cannot be
registered, NDDS_TRANSPORT_HANDLE_NIL is returned.
Note that a transport plugin's class name is automatically registered as an implicit alias
for the plugin. Thus, a class name can be used to refer to all the transport plugin
instances of that class.
13.7.1 Transport Lifecycles
If you create and register a transport plugin with a DomainParticipant, you are responsi-
ble for deleting it by calling its destructor. Builtin transport plugins are automatically
managed by RTI Data Distribution Service if they are implicitly registered through the
TransportBuiltinQosPolicy.
User-created transport plugins must not be deleted while they are is still in use by a
DomainParticipant. This generally means that a user-created transport plugin instance
can only be deleted after the DomainParticipant with which it was registered is deleted.
Note that a transport plugin cannot be "unregistered" from a DomainParticipant.

Chapter 13
13-28
A transport plugin instance cannot be registered with more than one DomainParticipant
at a time. This requirement is necessary to guarantee the multi-threaded safety of the
transport API.
Thus, if the same physical transport resources are to be used with multiple DomainPar-
ticipants in the same address space, the transport plugin should be written in such a way
so that it can be instantiated multiple times—once for each DomainParticipant in the
address space. Note that it is always possible to write the transport plugin so that multi-
ple transport plugin instances share the same underlying resources; however the bur-
den (if any) of guaranteeing multi-threaded safety to access shared resource shifts to the
transport plugin developer.
13.7.2 Transport Aliases
In order to use a transport plugin instance in an RTI Data Distribution Service application,
it must be registered with a DomainParticipant using the register_transport() operation
(Section 13.7). register_transport() takes a pointer to the transport plugin instance, and
in addition allows you to specify a sequence of "alias" strings to symbolically refer to the
transport plugin. The same alias strings can be used to register more than one transport
plugin.
Multiple transport plugins can be registered with a DomainParticipant. An alias symboli-
cally refers to one or more transport plugins registered with the DomainParticipant. Pre-
configured builtin transport plugin instances can be referred to using preconfigured
aliases.
A transport plugin's class name is automatically used as an implicit alias. It can be used
to refer to all the transport plugin instance of that class.
You can use aliases to refer to transport plugins in order to specify:
❏ Transport plugins to use for discovery (see enabled_transports in DISCOVERY
QosPolicy (DDS Extension) (Section 8.5.2)), and for DataWriters and DataReaders
(see TRANSPORT_SELECTION QosPolicy (DDS Extension) (Section 6.5.20)).
❏ Multicast addresses on which to receive discovery messages (see
multicast_receive_addresses in DISCOVERY QosPolicy (DDS Extension) (Sec-
tion 8.5.2)), and the multicast addresses and ports on which to receive user data
(DDS_DataReaderQos::multicast).
❏ Unicast ports used for user data (see TRANSPORT_UNICAST QosPolicy (DDS
Extension) (Section 6.5.21)) on both DataWriters and DataReaders.
❏ Transport plugins used to parse an address string in a locator.

13.8 Installing Additional Builtin Transport Plugins with PropertyQosPolicy
13-29
13. Transport Plugins
A DomainParticipant (and its contained entities) will start using a transport plugin after
the DomainParticipant is enabled (see Enabling Entities (Section 4.1.2)). An entity will
use all the transport plugins that match the specified transport QoS policy. All transport
plugins are treated uniformly, regardless of how they were created or registered; there is
no notion of some transports being more "special" that others.
13.7.3 Transport Network Addresses
The address bits not used by the transport plugin for its internal addressing constitute
its network address bits.
In order for RTI Data Distribution Service to properly route the messages, each unicast
interface in the RTI Data Distribution Service domain must have a unique address.
You specify the network address when installing a transport plugin via the
register_transport() operation (Section 13.7). Choose the network address for a trans-
port plugin so that the resulting fully qualified 128-bit address will be unique in the RTI
Data Distribution Service domain.
If two instances of a transport plugin are registered with a DomainParticipant, they need
different network addresses so that their unicast interfaces will have unique, fully qual-
ified 128-bit addresses.
While it is possible to create multiple transports with the same network address (this
can be useful for certain situations), this requires special entity configuration for most
transports to avoid clashes in resource use (e.g., sockets for UDPv4 transport).
13.8 Installing Additional Builtin Transport Plugins with
PropertyQosPolicy
Similar to default builtin transport instances, additional builtin transport instances can
also be configured through PROPERTY QosPolicy (DDS Extension) (Section 6.5.15).
To install additional instances of builtin transport, the Properties listed in Table 13.5 are
required.

Chapter 13
13-30
Table 13.5 Properties for Dynamically Loading and Registering Additional Builtin Transport Plugins
Property Name Description
dds.transport.load_plugins
Comma-separated list of <TRANSPORT_PREFIX>. Up to
<TRANSPORT_PREFIX> entries may be specified.
<TRANSPORT_PREFIX>
Indicates the additional builtin transport instances to be installed, and must be
in one of the following form, where <STRING> can be any string other than
“builtin”:
dds.transport.shmem.<STRING>
dds.transport.UDPv4.<STRING>
dds.transport.UDPv6.<STRING>
In the following examples in this table, <TRANSPORT_PREFIX> is used to
indicate one element of this string that is used as a prefix in the property
names for all the settings that are related to the plugin.
<TRANSPORT_PREFIX>.
aliases
Optional.
Aliases used to register the transport to the DomainParticipant. Refer to the
aliases_in parameter in register_transport() (see Installing Additional Builtin
Transport Plugins with register_transport() (Section 13.7)). Aliases should be
specified as a comma separated string, with each comma delimiting an alias. If
it is not specified, <TRANSPORT_PREFIX> is used as the default alias for the
plugin.
<TRANSPORT_PREFIX>.
network_address
Optional.
Network address used to register the transport to the DomainParticipant. Refer
to network_address_in parameter in register_transport() (see Installing Addi-
tional Builtin Transport Plugins with register_transport() (Section 13.7)). If it is
not specified, the network_address_out output parameter from
NDDS_Transport_create_plugin is used. The default value is a zeroed out
network address.
<TRANSPORT_PREFIX>.
<property_name>
Optional.
Property for creating the transport plugin. More than one
<TRANSPORT_PREFIX>.<property_name> can be specified. See Table 13.2
on page 13-8 through Table 13.4 on page 13-21 for the property names that can
be used to configure the additional builtin transport instances. The only differ-
ence is that the property name will be prefixed by dds.trans-
port.<builitn_transport_name>.<instance_name>, where <instance_name>
is configured through the dds.transport.load_plugins property instead of
dds.transport.<builtin_transport_name>.builtin.

13.9 Other Transport Support Operations
13-31
13. Transport Plugins
13.9 Other Transport Support Operations
13.9.1 Adding a Send Route
By default, a transport plugin will send outgoing messages using the network address
range at which the plugin was registered.
The add_send_route() operation allows you to control the routing of outgoing mes-
sages, so that a transport plugin will only send messages to certain ranges of destination
addresses.
Before using this operation, the DomainParticipant to which the transport is registered
must be disabled.
DDS_ReturnCode_t NDDSTransportSupport::add_send_route
(const NDDS_Transport_Handle_t & transport_handle_in,
const NDDS_Transport_Address_t & address_range_in,
DDS_Long address_range_bit_count_in)
transport_handle_in
A valid non-NIL transport handle as a result of a call to
register_transport() (Section 13.7).
address_range_in The outgoing address range for which to use this transport plugin.
address_range_bit_count_in The number of most significant bits used to specify the
address range.
It returns one of the standard return codes or
DDS_RETCODE_PRECONDITION_NOT_MET.
The method can be called multiple times for a transport plugin, with different address
ranges. You can set up a routing table to restrict the use of a transport plugin to send
messages to selected addresses ranges.
+--------------------------------------------------------------------+
| Outgoing Address Range 1 -> Transport Plugin |
+--------------------------------------------------------------------+
| : -> : |
+--------------------------------------------------------------------+
| Outgoing Address Range K -> Transport Plugin |
+--------------------------------------------------------------------+

Chapter 13
13-32
13.9.2 Adding a Receive Route
By default, a transport plugin will receive incoming messages using the network
address range at which the plugin was registered.
The add_receive_route() operation allows you to configure a transport plugin so that it
will only receive messages on certain ranges of addresses.
Before using this operation, the DomainParticipant to which the transport is registered
must be disabled.
DDS_ReturnCode_t NDDSTransportSupport::add_receive_route
(const NDDS_Transport_Handle_t & transport_handle_in,
const NDDS_Transport_Address_t & address_range_in,
DDS_Long address_range_bit_count_in)
transport_handle_in
A valid non-NIL transport handle as a result of a call to
register_transport() (Section 13.7).
address_range_in The incoming address range for which to use this transport plugin.
address_range_bit_count_in The number of most significant bits used to specify the
address range.
It returns one of the standard return codes or
DDS_RETCODE_PRECONDITION_NOT_MET.
The method can be called multiple times for a transport plugin, with different address
ranges.
+--------------------------------------------------------------------+
| Transport Plugin <- Incoming Address Range 1 |
+--------------------------------------------------------------------+
| : <- : |
+--------------------------------------------------------------------+
| Transport Plugin <- Incoming Address Range M |
+--------------------------------------------------------------------+
You can set up a routing table to restrict the use of a transport plugin to receive mes-
sages from selected ranges. For example, you may restrict a transport plugin to:
❏ Receive messages from a certain multicast address range.
❏ Receive messages only on certain unicast interfaces (when multiple unicast inter-
faces are available on the transport plugin).

13.9 Other Transport Support Operations
13-33
13. Transport Plugins
13.9.3 Looking Up a Transport Plugin
If you need to get the handle associated with a transport plugin that is registered with a
DomainParticipant, use the lookup_transport() operation.
NDDS_Transport_Handle_t NDDSTransportSupport::lookup_transport
(DDSDomainParticipant * participant_in,
DDS_StringSeq & aliases_out,
NDDS_Transport_Address_t & network_address_out,
NDDS_Transport_Plugin * transport_in )
participant_in
A non-NULL DomainParticipant.
aliases_out A sequence of strings where the aliases used to refer to the transport
plugin symbolically will be returned. NULL if not interested.
network_address_out The network address at which to register the transport plugin
will be returned here. NULL if not interested.
transport_in A non-NULL transport plugin that is already registered with the Domain-
Participant.
If successful, this operation returns a valid non-NIL transport handle, representing the
association between the DomainParticipant and the transport plugin; otherwise it returns
a NDDS_TRANSPORT_HANDLE_NIL upon failure.

Chapter 13
13-34

14-1
14. Built-In Topics
Chapter 14 Built-In Topics
This chapter discusses how to use Built-in Topics.
RTI Data Distribution Service must discover and keep track of remote entities, such as
new participants in the domain. This information may also be important to the applica-
tion itself, which may want to react to this discovery, or else access it on demand. To
support these needs, RTI Data Distribution Service provides built-in Topics (“DCPSPartici-
pant”, “DCPSPublication”, “DCPSSubscription” in Figure 12.2 on page 12-11) and the
corresponding built-in DataReaders that you can use to access this discovery informa-
tion.
The discovery information is accessed just as if it is normal application data. This allows
the application to know (either via listeners or by polling) when there are any changes
in those values. Note that only entities that belong to a different DomainParticipant are
being discovered and can be accessed through the built-in readers. Entities that are cre-
ated within the local DomainParticipant are not included as part of the data that can be
accessed by the built-in readers.
Built-in topics contain information about the remote entities, including their QoS poli-
cies. These QoS policies appear as normal fields inside the topic’s data, which can be
read by means of the built-in Topic. Additional information is provided to identify the
entity and facilitate the application logic.

Chapter 14
14-2
14.1 Listeners for Built-in Entities
Built-in entities have default listener settings:
❏ The built-in Subscriber and its built-in topics have 'nil' listeners—all status bits
are set in the listener masks, but the listener is NULL. This effectively creates a
NO-OP listener that does not reset communication status.
❏ Built-in DataReaders have null listeners with no status bits set in their masks.
This approach prevents callbacks to the builtin DataReader listeners from invoking your
DomainParticipant’s listeners, and at the same time ensures that the status changed flag
is not reset. For more information, see Table 4.4, “Effect of Different Combinations of
Listeners and Status Bit Masks,” on page 4-29 and “Hierarchical Processing of Listen-
ers” on page 4-30.
14.2 Built-in DataReaders
Built-in DataReaders belong to a built-in Subscriber, which can be retrieved by using the
DomainParticipant’s get_builtin_subscriber() operation. You can retrieve the built-in
DataReaders by using the Subscriber’s lookup_datareader() operation, which takes the
Topic name as a parameter. The built-in DataReader is created when
lookup_datareader() is called on a built-in topic for the first time.
To conserve memory, built-in Subscribers and DataReaders are created only if and when
you look them up. Therefore, if you do not want to miss any built-in data, you should
look up the built-in readers before the DomainParticipant is enabled.
Table 14.1 through Table 14.4 describe the built-in topics and their data types. The
USER_DATA QosPolicy (Section 6.5.23), TOPIC_DATA QosPolicy (Section 5.2.1) and
GROUP_DATA QosPolicy (Section 6.4.4) are included as part of the built-in data type
and are not used by RTI Data Distribution Service. Therefore, you can use them to send
application-specific information.
Built-in topics can be used in conjunction with the ignore_*() operations to ignore cer-
tain entities (see Section 14.4).

14.2 Built-in DataReaders
14-3
14. Built-In Topics
Table 14.1 Participant Built-in Topic’s Data Type (DDS_ParticipantBuiltinTopicData)
Type Field Description
DDS_BuiltinTopicKey key
DDS key to distinguish the discovered DomainPartici-
pant
DDS_UserDataQosPolicy user_data
Data that can be set when the related DomainPartici-
pant is created (via the USER_DATA QosPolicy (Sec-
tion 6.5.23)) and that the application may use as it
wishes (e.g., to perform some security checking).
DDS_PropertyQosPolicy property
Pairs of names/values to be stored with the Domain-
Participant. See PROPERTY QosPolicy (DDS Exten-
sion) (Section 6.5.15). The usage is strictly
application-dependent.
DDS_ProtocolVersion_t
rtps_protocol_
version
Version number of the RTPS wire protocol used.
DDS_VendorId_t rtps_vendor_id ID of vendor implementing the RTPS wire protocol.
DDS_UnsignedLong
dds_builtin_
endpoints
A bitmap set by the discovery plugins.
Each bit in this field indicates a builtin endpoint pres-
ent for discovery.
DDS_LocatorSeq
default_unicast_
locators
If the TransportUnicastQosPolicy is not specified
when a DataWriter/DataReader is created, the
unicast_locators in the corresponding Publication/
Subscription builtin topic data will be empty. When
the unicast_locators in the Publication/Subscription-
BuiltinTopicData is empty, the
default_unicast_locators in the corresponding Partici-
pant Builtin Topic Data is assumed.
If default_unicast_locators is empty, it defaults to
DomainParticipantQos.default_unicast.
DDS_ProductVersion_t product_version
A vendor-specific parameter. The current version of
RTI Data Distribution Service.
DDS_EntityNameQosPolicy participant_name
A name assigned to the DomainParticipant. See ENTI-
TYNAME QosPolicy (DDS Extension) (Section 8.5.5).
Table 14.2 Publication Built-in Topic’s Data Type (DDS_PublicationBuiltinTopicData)
Type Field Description
DDS_BuiltinTopicKey_t key DDS key to distinguish the discovered DataWriter
DDS_BuiltinTopicKey_t participant_key
DDS key to distinguish the participant to which
the discovered DataWriter belongs

Chapter 14
14-4
DDS_String topic_name Topic name of the discovered DataWriter
DDS_String type_name
Type name attached to the topic of the discovered
DataWriter
DDS_DurabilityQosPolicy durability
QosPolicies of the discovered DataWriter
DDS_DurabilityService-
QosPolicy
durability_service
DDS_DeadlineQosPolicy deadline
DDS_DestinationOrder-
QosPolicy
destination_order
DDS_LatencyBudget-
QosPolicy
latency_budget
DDS_LivelinessQosPolicy liveliness
DDS_ReliabilityQosPolicy reliability
DDS_LifespanQosPolicy lifespan
DDS_UserDataQosPolicy user_data
Data that can be set when the DataWriter is cre-
ated (via the USER_DATA QosPolicy (Section
6.5.23)) and that the application may use as it
wishes.
DDS_OwnershipQosPolicy ownership
QosPolicies of the discovered DataWriter
DDS_OwnershipStrength-
QosPolicy
ownership_strength
DDS_DestinationOrder-
QosPolicy
destination_order
DDS_PresentationQosPolicy presentation
DDS_PartitionQosPolicy partition
Name of the partition, set in the PARTITION
QosPolicy (Section 6.4.5) for the publisher to
which the discovered DataWriter belongs
DDS_TopicDataQosPolicy topic_data
Data that can be set when the Top ic (with which
the discovered DataWriter is associated) is created
(via the TOPIC_DATA QosPolicy (Section 5.2.1))
and that the application may use as it wishes.
DDS_GroupDataQosPolicy group_data
Data that can be set when the Publisher to which
the discovered DataWriter belongs is created (via
the GROUP_DATA QosPolicy (Section 6.4.4)) and
that the application may use as it wishes.
Table 14.2 Publication Built-in Topic’s Data Type (DDS_PublicationBuiltinTopicData)
Type Field Description

14.2 Built-in DataReaders
14-5
14. Built-In Topics
DDS_TypeCode * type_code
Type code information about this Topic. See Using
Generated Types without RTI Data Distribution
Service (Standalone) (Section 3.7).
DDS_BuiltinTopicKey_t publisher_key
The key of the Publisher to which the DataWriter
belongs.
DDS_PropertyQosPolicy property
Properties (pairs of names/values) assigned to
the corresponding DataWriter. Usage is strictly
application-dependent. See PROPERTY QosPol-
icy (DDS Extension) (Section 6.5.15).
DDS_LocatorSeq unicast_locators
If the TransportUnicastQosPolicy is not specified
when a DataWriter/DataReader is created, the
unicast_locators in the corresponding Publica-
tion/Subscription builtin topic data will be
empty. When the unicast_locators in the Publica-
tion/SubscriptionBuiltinTopicData is empty, the
default_unicast_locators in the corresponding
Participant Builtin Topic Data is assumed.
DDS_GUID_t virtual_guid
Virtual GUID for the corresponding DataWriter.
For more information, see Durability and Persis-
tence Based on Virtual GUIDs (Section 11.2).
DDS_ProtocolVersion_t
rtps_protocol_
version
Version number of the RTPS wire protocol in use.
DDS_VendorId_t rtps_vendor_id
ID of the vendor implementing the RTPS wire
protocol.
DDS_Product_Version_t product_version
A vendor-specific value. For RTI, this is the cur-
rent version of RTI Data Distribution Service.
Table 14.2 Publication Built-in Topic’s Data Type (DDS_PublicationBuiltinTopicData)
Type Field Description

Chapter 14
14-6
DDS_Boolean
disable_positive_
acks
This is a vendor specific parameter. Determines
whether matching DataReaders send positive
acknowledgements for reliability.
DDS_LocatorFilterQosPolicy locator_filter
When the MULTI_CHANNEL QosPolicy (DDS
Extension) (Section 6.5.12) is used on the discov-
ered DataWriter, the locator_filter contains the
sequence of LocatorFilters in that policy.
There is one LocatorFilter per DataWriter channel.
A channel is defined by a filter expression and a
sequence of multicast locators.
See LOCATOR_FILTER QoS Policy (DDS Exten-
sion) (Section 14.2.1).
Table 14.3 Subscription Built-in Topic’s Data Type (DDS_SubscriptionBuiltinTopicData)
Type Field Description
DDS_BuiltinTopicKey_t key DDS key to distinguish the discovered DataReader.
DDS_BuiltinTopicKey_t participant_key
DDS key to distinguish the participant to which
the discovered DataReader belongs.
char * topic_name Topic name of the discovered DataReader.
char * type_name
Type name attached to the Topic of the discovered
DataReader.
DDS_DurabilityQosPolicy durability
QosPolicies of the discovered DataReader
DDS_DeadlineQosPolicy deadline
DDS_LatencyBudget-
QosPolicy
latency_budget
DDS_LivelinessQosPolicy liveliness
DDS_ReliabilityQosPolicy reliability
DDS_OwnershipQosPolicy ownership
DDS_
DestinationOrderQosPolicy
destination_order
DDS_UserDataQosPolicy user_data
Data that can be set when the DataReader is created
(via the USER_DATA QosPolicy (Section 6.5.23))
and that the application may use as it wishes.
Table 14.2 Publication Built-in Topic’s Data Type (DDS_PublicationBuiltinTopicData)
Type Field Description

14.2 Built-in DataReaders
14-7
14. Built-In Topics
DDS_
TimeBasedFilterQosPolicy
time_based_filter
QosPolicies of the discovered DataReader
DDS_PresentationQosPolicy presentation
DDS_PartitionQosPolicy partition
Name of the partition, set in the PARTITION
QosPolicy (Section 6.4.5) for the Subscriber to
which the discovered DataReader belongs.
DDS_TopicDataQosPolicy topic_data
Data that can be set when the Topic to which the
discovered DataReader belongs is created (via the
TOPIC_DATA QosPolicy (Section 5.2.1)) and that
the application may use as it wishes.
DDS_GroupDataQosPolicy group_data
Data that can be set when the Publisher to which
the discovered DataReader belongs is created (via
the GROUP_DATA QosPolicy (Section 6.4.4)) and
that the application may use as it wishes.
DDS_TypeCode * type_code
Type code information about this Top ic . See Using
Generated Types without RTI Data Distribution
Service (Standalone) (Section 3.7).
DDS_BuiltinTopicKey_t subscriber_key
Key of the Subscriber to which the DataReader
belongs.
DDS_PropertyQosPolicy property
Properties (pairs of names/values) assigned to the
corresponding DataReader. Usage is strictly appli-
cation-dependent. See PROPERTY QosPolicy
(DDS Extension) (Section 6.5.15).
DDS_LocatorSeq unicast_locators
If the TransportUnicastQosPolicy is not specified
when a DataWriter/DataReader is created, the
unicast_locators in the corresponding Publica-
tion/Subscription builtin topic data will be empty.
When the unicast_locators in the Publication/Sub-
scriptionBuiltinTopicData is empty, the
default_unicast_locators in the corresponding Par-
ticipant Builtin Topic Data is assumed.
DDS_LocatorSeq multicast_locators
Custom multicast locators that the endpoint can
specify.
DDS_ContentFilter-
Property_t
content_filter_
property
Provides all the required information to enable
content filtering on the writer side.
Table 14.3 Subscription Built-in Topic’s Data Type (DDS_SubscriptionBuiltinTopicData)
Type Field Description

Chapter 14
14-8
DDS_GUID_t virtual_guid
Virtual GUID for the corresponding DataReader.
For more information, see Durability and Persis-
tence Based on Virtual GUIDs (Section 11.2).
DDS_ProtocolVersion_t
rtps_protocol_
version
Version number of the RTPS wire protocol in use.
DDS_VendorId_t rtps_vendor_id
ID of the vendor implementing the RTPS wire pro-
tocol.
DDS_Product_Version_t product_version
A vendor-specific value. For RTI, this is the cur-
rent version of RTI Data Distribution Service.
DDS_Boolean
disable_positive_
acks
This is a vendor specific parameter. Determines
whether matching DataReaders send positive
acknowledgements for reliability.
Table 14.3 Subscription Built-in Topic’s Data Type (DDS_SubscriptionBuiltinTopicData)
Type Field Description

14.2 Built-in DataReaders
14-9
14. Built-In Topics
Table 14.4 Topic Built-in Topic’s Data Type (DDS_TopicBuiltinTopicData) (See “Note:” on page 14-11)
Type Field Description
DDS_BuiltinTopicKey_t key DDS key to distinguish the discovered Topic
DDS_String name Topic name
DDS_String type_name type name attached to the Topic
DDS_DurabilityQosPolicy durability
QosPolicy of the discovered Topic
DDS_DurabilityServiceQosPolicy durability_service
DDS_DeadlineQosPolicy deadline
DDS_LatencyBudgetQosPolicy latency_budget
DDS_LivelinessQosPolicy liveliness
DDS_ReliabilityQosPolicy reliability
DDS_TransportPriorityQosPolicy transport_priority
DDS_LifespanQosPolicy lifespan
DDS_DestinationOrderQosPolicy
destination_
order
DDS_HistoryQosPolicy history
DDS_ResourceLimitsQosPolicy resource_limits
DDS_OwnershipQosPolicy ownership
DDS_TopicDataQosPolicy topic_data
Data that can be set when the Topic to which
the discovered DataReader belongs is created
(via the TOPIC_DATA QosPolicy (Section
5.2.1)) and that the application may use as it
wishes.
Chapter 14
14-10
Table 14.5 lists the QoS of the built-in Subscriber and DataReader that are created for
accessing discovery data. These are provided for your reference only; they cannot be
changed.
Table 14.5 QoS of Built-in Subscriber and DataReader
QosPolicy Value
Deadline period = infinite
DestinationOrder kind = BY_RECEPTION_TIMESTAMP_DESTINATIONORDER_QOS
Durability kind = TRANSIENT_LOCAL_DURABILITY_QOS
EntityFactory autoenable_created_entities = TRUE
GroupData value = empty sequence
History
kind = KEEP_LAST_HISTORY_QOS
depth = 1
LatencyBudget duration = 0
Liveliness
kind = AUTOMATIC_LIVELINESS_QOS
lease_duration = infinite
Ownership kind = SHARED_OWNERSHIP_QOS
Ownership Strength value = 0
Presentation
access_scope = TOPIC_PRESENTATION_QOS
coherent_access = FALSE
ordered_access = FALSE
Partition name = empty sequence
ReaderDataLifecycle autopurge_nowriter_samples_delay = infinite
Reliability
kind = RELIABLE_RELIABILITY_QOS
max_blocking_time is irrelevant for the DataReader
ResourceLimits
Depends on setting of DomainParticipantResourceLimitsQosPolicy and Discov-
eryConfigQosPolicy in DomainParticipantQos:
max_samples = domainParticipantQos.discovery_config.
[participant/publication/subscription]_reader_resource_limits.max_samples
max_instances = domainParticipantQos.resource_limits.
[remote_writer/reader/participant]_allocation.max_count
max_samples_per_instance = 1
TimeBasedFilter minimum_separation = 0
TopicData value = empty sequence
UserData value = empty sequence

14.2 Built-in DataReaders
14-11
14. Built-In Topics
Note: The DDS_TopicBuiltinTopicData built-in topic (described in Table 14.4) is meant
to convey information about discovered Top ics. However, this topic's data is not sent
separately and therefore a DataReader for DDS_TopicBuiltinTopicData will not receive
any data. Instead, DDS_TopicBuiltinTopicData data is included in the information car-
ried by the built-in topics for Publications and Subscriptions
(DDS_PublicationBuiltinTopicData and DDS_SubscriptionBuiltinTopicData) and can be
accessed with their builtin DataReaders.
14.2.1 LOCATOR_FILTER QoS Policy (DDS Extension)
The LocatorFilter QoS Policy is only applicable to the builtin topic for a Publication (see
Table 14.2, “Publication Built-in Topic’s Data Type (DDS_PublicationBuiltinTopicData),”
on page 14-3).
Table 14.6 DDS_LocatorFilterQosPolicy
Type Field Name Description
DDS_LocatorFilterSeq locator_filters
A sequence of locator filters, described in Table 14.7 on page 14-
11. There is one locator filter per DataWriter channel. If the
length of the sequence is zero, the DataWriter is not using multi-
channel.
char * filter_name
Name of the filter class used to describe the locator filter expres-
sions. The following two values are supported:
• DDS_SQLFILTER_NAME
• DDS_STRINGMATCHFILTER_NAME
Table 14.7 DDS_LocatorFilter_t
Type Field Name Description
DDS_LocatorSeq locators
A sequence of multicast address locators for the locator filter.
See Table 14.8 on page 14-12.
char *
filter_express
ion
A logical expression used to determine if the data will be pub-
lished in the channel associated with this locator filter. See “SQL
Filter Expression Notation” on page 5-23 and “STRINGMATCH
Filter Expression Notation” on page 5-32 for information about
the expression syntax.

Chapter 14
14-12
14.3 Accessing the Built-in Subscriber
Getting the built-in subscriber allows you to retrieve the built-in readers of the built-in
topics through the Subscriber’s lookup_datareader() operation. By accessing the built-in
reader, you can access discovery information about remote entities.
// Lookup builtin reader
DDSDataReader *builtin_reader =
builtin_subscriber->lookup_datareader(DDS_PUBLICATION_TOPIC_NAME);
if (builtin_reader == NULL) {
// ... error
}
// Register listener to builtin reader
MyPublicationBuiltinTopicDataListener builtin_reader_listener =
new MyPublicationBuiltinTopicDataListener();
if (builtin_reader->set_listener(builtin_reader_listener,
DDS_DATA_AVAILABLE_STATUS) != DDS_RETCODE_OK) {
// ... error
}
// enable domain participant
if (participant->enable() != DDS_RETCODE_OK) {
Table 14.8 DDS_Locator_t
Type Field Name Description
DDS_Long kind
If the locator kind is DDS_LOCATOR_KIND_UDPv4
a
, the
address contains an IPv4 address. The leading 12 octets of the
address must be zero. The last 4 octets store the IPv4 address.
If the locator kind is DDS_LOCATOR_KIND_UDPv6
a
, the
address contains an IPv6 address. IPv6 addresses typically use a
shorthand hexadecimal notation that maps one-to-one to the 16
octets of the address.
DDS_Octet[16] address The locator address.
DDS_UnsignedLong port The locator port number.
a. In C#, the locator kinds for UDPv4 and UDPv6 addresses are Locator_t.LOCATOR_KIND_UDPv4 and
Locator_t.LOCATOR_KIND_UDPv6.

14.4 Restricting Communication—Ignoring Entities
14-13
14. Built-In Topics
// ... error
}
For example, you can call the DomainParticipant’s get_builtin_subscriber() operation,
which will provide you with a built-in Subscriber. Then you can use that built-in Sub-
scriber to call the Subscriber’s lookup_datareader() operation; this will retrieve the built-
in reader. Another option is to register a Listener on the built-in subscriber instead, or
poll for the status of the built-in subscriber to see if any of the built-in data readers have
received data.
14.4 Restricting Communication—Ignoring Entities
The ignore_participant() operation allows an application to ignore all communication
from a specific DomainParticipant. Or for even finer control you can use the
ignore_publication(), ignore_subscription(), and ignore_topic() operations. These
operations are described below.
DDS_ReturnCode_t ignore_participant (const DDS_InstanceHandle_t &handle)
DDS_ReturnCode_t ignore_publication (const DDS_InstanceHandle_t &handle)
DDS_ReturnCode_t ignore_subscription (const DDS_InstanceHandle_t &handle)
DDS_ReturnCode_t ignore_topic (const DDS_InstanceHandle_t &handle)
The entity to ignore is identified by the handle argument. It may be a local or remote
entity. For ignore_publication(), the handle will be that of a local DataWriter or a discov-
ered remote DataWriter. For ignore_subscription(), that handle will be that of a local
DataReader or a discovered remote DataReader.
The safest approach for ignoring an entity is to call the ignore operation within the Lis-
tener callback of the built-in reader, or before any local entities are enabled. This will
guarantee that the local entities (entities that are created by the local
DomainParticipant)
will never have a chance to establish communication with the remote entities (entities
that are created by another
DomainParticipant) that are going to be ignored.
If the above is not possible and a remote entity is to be ignored after the communication
channel has been established, the remote entity will still be removed from the database
of the local application as if it never existed. However, since the remote application is
not aware that the entity is being ignored, it may potentially be expecting to receive
messages or continuing to send messages. Depending on the QoS of the remote entity,
this may affect the behavior of the remote application and may potentially stop the
remote application from communicating with other entities.

Chapter 14
14-14
You can use this operation in conjunction with the ParticipantBuiltinTopicData to imple-
ment access control. You can pass application data associated with a DomainParticipant
in the USER_DATA QosPolicy (Section 6.5.23). This application data is propagated as a
field in the built-in topic. Your application can use the data to implement an access con-
trol policy.
Ignore operations, in conjunction with the Built-in Topic Data, can be used to implement
access control. You can pass data associated with an entity in the USER_DATA QosPol-
icy (Section 6.5.23), GROUP_DATA QosPolicy (Section 6.4.4) or TOPIC_DATA QosPol-
icy (Section 5.2.1). This data is propagated as a field in the built-in topic. When data for a
built-in topic is received, the application can check the user_data, group_data or
topic_data field of the remote entity, determine if it meets the security requirement, and
ignore the remote entity if necessary.
See also: Chapter 12: Discovery.
14.4.1 Ignoring Specific Remote DomainParticipants
The ignore_participant() operation is used to instruct RTI Data Distribution Service to
locally ignore a remote DomainParticipant. It causes RTI Data Distribution Service to
locally behave as if the remote DomainParticipant does not exist.
DDS_ReturnCode_t ignore_participant (const DDS_InstanceHandle_t & handle)
After invoking this operation, RTI Data Distribution Service will locally ignore any Topic,
publication, or subscription that originates on that DomainParticipant. (If you only want to
ignore specific publications or subscriptions, see Section 14.4.2 instead.) Figure 14.1,
“Ignoring Participants,” on page 14-15 provides an example.
Caution: There is no way to reverse this operation. You can add to the peer list, how-
ever—see Section 8.5.2.3.
14.4.2 Ignoring Publications and Subscriptions
You can instruct RTI Data Distribution Service to locally ignore a publication or subscrip-
tion. A publication/subscription is defined by the association of a Topic name, user data
and partition set on the Publisher/Subscriber. After this call, any data written related to
associated DataWriter/DataReader will be ignored.
The entity to ignore is identified by the handle argument. For ignore_publication(), the
handle will be that of a DataWriter. For ignore_subscription(), that handle will be that of
a DataReader.
This operation can be used to ignore local and remote entities:

14.4 Restricting Communication—Ignoring Entities
14-15
14. Built-In Topics
❏ For local entities, you can obtain the handle argument by calling the
get_instance_handle() operation for that particular entity.
Figure 14.1 Ignoring Participants
class MyParticipantBuiltinTopicDataListener : public DDSDataReaderListener {
public:
virtual void on_data_available(DDSDataReader *reader);
// ......
};
void MyParticipantBuiltinTopicdataListener::on_data_available(
DDSDataReader *reader) {
DDSParticipantBuiltinTopicDataReader *builtinTopicDataReader =
DDSParticipantBuiltinTopicDataDataReader *) reader;
DDS_ParticipantBuiltinTopicDataSeq data_seq;
DDS_SampleInfoSeq info_seq;
int = 0;
if (builtinTopicDataReader->take(data_seq, info_seq,
DDS_LENGTH_UNLIMITED, DDS_ANY_SAMPLE_STATE,
DDS_ANY_VIEW_STATE, DDS_ANY_INSTANCE_STATE) != DDS_RETCODE_OK){
// ... error
}
for (i = 0; i < data_seq.length(); ++i) {
if (info_seq[i].valid_data) {
// check user_data for access control
if (data_seq[i].user_data[0] != 0x9) {
if (builtinTopicDataReader->get_subscriber()
->get_participant()
->ignore_participant(info_seq[i].instance_handle)
!= DDS_RETCODE_OK) {
// ... error
}
}
}
}
if (builtinTopicDataReader->return_loan(data_seq, info_seq)
!= DDS_RETCODE_OK) {
// ... error
}
}

Chapter 14
14-16
❏ For remote entities, you can obtain the handle argument from the
DDS_SampleInfo structure retrieved when reading data samples available for
the entity’s built-in DataReader.
DDS_ReturnCode_t ignore_publication (const DDS_InstanceHandle_t & handle)
DDS_ReturnCode_t ignore_subscription (const DDS_InstanceHandle_t & handle)
Caution: There is no way to reverse these operations.
Figure 14.2, “Ignoring Publications,” on page 14-17 provides an example.
14.4.3 Ignoring Topics
The ignore_topic() operation instructs RTI Data Distribution Service to locally ignore a
Topic. This means it will locally ignore any publication or subscription to the Topic.
DDS_ReturnCode_t ignore_topic (const DDS_InstanceHandle_t & handle)
Caution: There is no way to reverse this operation.
If you know that your application will never publish or subscribe to data under certain
topics, you can use this operation to save local resources.
The To pi c to ignore is identified by the handle argument. This handle is the one that
appears in the DDS_SampleInfo retrieved when reading the data samples from the
built-in DataReader to the To pi c.

14.4 Restricting Communication—Ignoring Entities
14-17
14. Built-In Topics
Figure 14.2 Ignoring Publications
class MyPublicationBuiltinTopicDataListener : public DDSDataReaderListener {
public:
virtual void on_data_available(DDSDataReader *reader);
// ......
};
void MyPublicationBuiltinTopicdataListener::on_data_available(
DDSDataReader *reader) {
DDSPublicationBuiltinTopicDataReader *builtinTopicDataReader =
(DDS_PublicationBuiltinTopicDataReader *)reader;
DDS_PublicationBuiltinTopicDataSeq data_seq;
DDS_SampleInfoSeq info_seq;
int = 0;
if (builtinTopicDataReader->take(data_seq, info_seq,
DDS_LENGTH_UNLIMITED, DDS_ANY_SAMPLE_STATE,
DDS_ANY_VIEW_STATE, DDS_ANY_INSTANCE_STATE) != DDS_RETCODE_OK) {
// ... error
}
for (i = 0; i < data_seq.length(); ++i) {
if (info_seq[i].valid_data) {
// check user_data for access control
if (data_seq[i].user_data[0] != 0x9) {
if (builtinTopicDataReader->get_subscriber()
->get_participant()
->ignore_publication(info_seq[i].instance_handle)
!= DDS_RETCODE_OK) {
// ... error
}
}
}
}
if (builtinTopicDataReader->return_loan(data_seq, info_seq) !=
DDS_RETCODE_OK) {
// ... error
}
}

Chapter 14
14-18

15-1
15. Configuring QoS
with XML
Chapter 15 Configuring QoS with XML
RTI Data Distribution Service entities are configured by means of QosPolicies. The QoS
may be set programmatically in one of the following ways:
❏ Directly when the entity is created as an additional argument to the
create_<entity>() operation.
❏ Directly via the set_qos() operation on the entity.
❏ Indirectly as a default QoS on the factory for the entity
(set_default_<entity>_qos() operations on Publisher, Subscriber, DomainPartici-
pant, DomainParticipantFactory)
Entities can also be configured from an XML file or XML string. With this feature, you
can change QoS configurations simply by changing the XML file or string—you do not
have to recompile the application. This chapter describes how to configure RTI Data Dis-
tribution Service entities using XML:
❏ Example XML File (Section 15.1)
❏ How to Load XML-Specified QoS Settings (Section 15.2)
❏ How to Use XML-Specified QoS Settings (Section 15.3)
❏ XML File Syntax (Section 15.4)
❏ XML String Syntax (Section 15.5)
❏ How the XML is Validated (Section 15.6)
❏ Configuring QoS with XML (Section 15.7)
❏ QoS Profiles (Section 15.8)
❏ QoS Libraries (Section 15.9)
❏ URL Groups (Section 15.10)

Chapter 15
15-2
15.1 Example XML File
The QoS configuration of a DDS entity can be loaded from an XML file or string. Let's
look at a very basic configuration file, just to get an idea of its contents. You will learn
the meaning of each line as you read the rest of this chapter:
Example Configuration File
<?xml version="1.0" encoding="ISO-8859-1"?>
<!-- A XML configuration file -->
<dds version = 4.5x>
<qos_library name="RTILibrary">
<!--Individual QoS are a shortcut for QoS Profiles with single QoS->
<datawriter_qos name="KeepAllWriter">
<history>
<kind>KEEP_ALL_HISTORY_QOS</kind>
</history>
</datawriter_qos>
<!-- A Qos Profile is a set of related QoS -->
<qos_profile name="StrictReliableCommunicationProfile">
<datawriter_qos>
<history>
<kind>KEEP_ALL_HISTORY_QOS</kind>
</history>
<reliability>
<kind>RELIABLE_RELIABILITY_QOS</kind>
</reliability>
</datawriter_qos>
<datareader_qos>
<history>
<kind>KEEP_ALL_HISTORY_QOS</kind>
</history>
<reliability>
<kind>RELIABLE_RELIABILITY_QOS</kind>
</reliability>
</datareader_qos>
</qos_profile>
</qos_library>
</dds>
See $NDDSHOME/resource/qos_profiles_4.5x
1
/xml/NDDS_QOS_PROFILES.exam-
ple.xml for another example; this file contains the default QoS values for all entity
kinds.
1. x stands for the version letter of the current release.
15.2 How to Load XML-Specified QoS Settings
15-3
15. Configuring QoS
with XML
15.2 How to Load XML-Specified QoS Settings
If specified, XML-specified QoS settings are automatically loaded by the DomainPartici-
pantFactory. There are several ways to load XML QoS profiles into your application.
The following list presents the various approaches, listed by load order:
• $NDDSHOME/resource/qos_profiles_4.5x
1
/xml/NDDS_QOS_PROFILES.xml
This file is loaded automatically if it exists (not the default) and
ignore_resource_profile in the PROFILE QosPolicy (DDS Extension) (Section
8.4.1) is FALSE (the default). NDDS_QOS_PROFILES.xml does not exist by
default. However, NDDS_QOS_PROFILES.example.
xml is shipped with the
host bundle of the product; you can copy it to NDDS_QOS_PROFILES.xml and
modify it for your own use. The file contains the default QoS values that will be
used for all entity kinds. (First to be loaded)
• URL Groups in NDDS_QOS_PROFILES
URL groups (see URL Groups (Section 15.10)) separated by semicolons referenced
by the environment variable NDDS_QOS_PROFILES are loaded automatically
if they exist and ignore_environment_profile in PROFILE QosPolicy (DDS Exten-
sion) (Section 8.4.1) is FALSE (the default).
• <working directory>/USER_QOS_PROFILES.xml
This file is loaded automatically if it exists and ignore_user_profile in PROFILE
QosPolicy (DDS Extension) (Section 8.4.1) is FALSE (the default).
• URL groups in url_profile
URL groups (see URL Groups (Section 15.10)) referenced by url_profile (in PRO-
FILE QosPolicy (DDS Extension) (Section 8.4.1)) will be loaded automatically if
specified.
• XML strings in string_profile
The sequence of XML strings referenced by string_profile (in PROFILE QosPol-
icy (DDS Extension) (Section 8.4.1)) will be loaded automatically if specified. (Last
to be loaded)
You may use a combination of the above approaches.
1. x stands for the version letter of the current release.

Chapter 15
15-4
The location of the XML documents (only files and strings are supported) is specified
using URL (Uniform Resource Locator) format. For example:
❏ File Specification: file:///usr/local/default_dds.xml
❏ String Specification: str://"<dds><qos_library>…</qos_library></dds>"
If you omit the URL schema name, RTI Data Distribution Service will assume a file name.
For example:
❏ File Specification: /usr/local/default_dds.xml
Duplicate QoS profiles are not allowed. RTI Data Distribution Service will report an error
message in these scenarios. To overwrite a QoS profile, use QoS-Profile Inheritance (Sec-
tion 15.8.2).
15.2.1 Loading, Reloading and Unloading Profiles
You do not have to explicitly call load_profiles(). QoS profiles are loaded when any of
these DomainParticipantFactory operations are called:
❏ create_participant() (see Section 8.3.1)
❏ create_participant_with_profile() (see Section 8.3.1)
❏ get_<entity>_qos_from_profile() (where <entity> is participant, topic, pub-
lisher, subscriber, datawriter, or datareader) (see Section 8.2.5)
❏ get_<entity>_qos_from_profile_w_topic_name() (where <entity> is topic,
datawriter, or datareader) (see Section 8.2.5)
❏ get_default_participant_qos() (see Section 8.2.2)
❏ get_qos_profile_libraries() (See Section 15.9.1)
❏ get_qos_profiles() (See Section 15.8.5)
❏ load_profiles()
❏ set_default_participant_qos_with_profile() (see Section 8.2.2)
❏ set_default_library() (see Section 6.2.4.3)
❏ set_default_profile() (see Section 6.2.4.3)
QoS profiles are reloaded when either of these DomainParticipantFactory operations are
called:
❏ reload_profiles()
❏ set_qos() (see Section 4.1.7)

15.3 How to Use XML-Specified QoS Settings
15-5
15. Configuring QoS
with XML
It is important to distinguish between loading and reloading:
❏ Loading only happens when there are no previously loaded profiles. This could
be when the profiles are loaded the first time or after a call to unload_profiles().
❏ Reloading replaces all previously loaded profiles. Reloading a profile does not
change the QoS of entities that have already been created with previously loaded
profiles.
The DomainParticipantFactory also has an unload_profiles() operation that frees the
resources associated with the XML QoS profiles.
DDS_ReturnCode_t unload_profiles()
15.3 How to Use XML-Specified QoS Settings
You can use the operations listed in Table 15.1 to refer and use QoS profiles (see
Section 15.8) described in XML files and XML strings.
Table 15.1 Operations for Working with QoS Profiles
Working With ... Profile-Related Operations Reference
DataReaders set_qos_with_profile Section 7.3.7.2
DataWriters set_qos_with_profile Section 6.3.12.2

Chapter 15
15-6
DomainParticipants
create_datareader_with_profile Section 7.3.1
create_datawriter_with_profile Section 6.3.1
create_publisher_with_profile Section 6.2.2
create_subscriber_with_profile Section 7.2.2
create_topic_with_profile Section 5.1.1
get_default_library
Section 8.3.6.3get_default_profile
get_default_profile_library
set_default_datareader_qos_with_profile
Section 8.3.6.4
set_default_datawriter_qos_with_profile
set_default_library
Section 8.3.6.3
set_default_profile
set_default_publisher_qos_with_profile
Section 8.3.6.4set_default_subscriber_qos_with_profile
set_default_topic_qos_with_profile
set_qos_with_profile Section 8.3.6.2
Table 15.1 Operations for Working with QoS Profiles
Working With ... Profile-Related Operations Reference

15.3 How to Use XML-Specified QoS Settings
15-7
15. Configuring QoS
with XML
DomainParticipantFactory
create_participant_with_profile Section 8.3.1
get_datareader_qos_from_profile
Section 8.2.5
get_datawriter_qos_from_profile
get_datawriter_qos_from_profile_w_topic_name
get_datareader_qos_from_profile_w_topic_name
get_default_library
Section 8.2.1.1get_default_profile
get_default_profile_library
get_participant_qos_from_profile
Section 8.2.5
get_publisher_qos_from_profile
get_subscriber_qos_from_profile
get_topic_qos_from_profile
get_topic_qos_from_profile_w_topic_name
get_qos_profiles Section 15.8.5
get_qos_profile_libraries Section 15.9.1
load_profiles
Section 15.2.1
reload_profiles
set_default_participant_qos_with_profile
Section 8.2.2
set_default_library
Section 8.2.1.1
set_default_profile
unload_profiles Section 15.2.1
Publishers
create_datawriter_with_profile Section 6.2.2
get_default_library
Section 6.2.4.3get_default_profile
get_default_profile_library
set_default_datawriter_qos_with_profile Section 6.2.4.4
set_default_library
Section 6.2.4.3
set_default_profile
set_qos_with_profile Section 6.2.4.2
Table 15.1 Operations for Working with QoS Profiles
Working With ... Profile-Related Operations Reference

Chapter 15
15-8
15.4 XML File Syntax
The XML configuration file must follow these syntax rules:
❏ The syntax is XML and the character encoding is UTF-8.
❏ Opening tags are enclosed in <>; closing tags are enclosed in </>.
❏ A tag value is a UTF-8 encoded string. Legal values are alphanumeric characters.
The middleware’s parser will remove all leading and trailing spaces
1
from the
string before it is processed.
For example, " <tag> value </tag>" is the same as "<tag>value</tag>".
❏ All values are case-sensitive unless otherwise stated.
❏ Comments are enclosed as follows: <!-- comment -->.
❏ The root tag of the configuration file must be <dds> and end with </dds>.
❏ The primitive types for tag values are specified in Table 15.2.
Subscribers
create_datareader_with_profile Section 7.3.1
get_default_library
Section 7.2.4.3get_default_profile
get_default_profile_library
set_default_datawriter_qos_with_profile Section 7.2.4.4
set_default_library
Section 7.2.4.3
set_default_profile
set_qos_with_profile Section 7.2.4.2
Topics set_qos_with_profile Section 5.1.3
Table 15.1 Operations for Working with QoS Profiles
Working With ... Profile-Related Operations Reference
1. Leading and trailing spaces in enumeration fields will not be considered valid if you use the distributed
XSD document to do validation at run-time with a code editor (see Section 15.6).

15.5 XML String Syntax
15-9
15. Configuring QoS
with XML
15.5 XML String Syntax
XML profiles can be described using strings. This configuration is useful for architec-
tures without a file system.
There are two different ways to configure DDS entities via XML strings:
❏ String URLs are prefixed by the URI schema str:// and enclosed in double quotes.
For example:
str://"<dds><qos_library>...</qos_library></dds>"
The string URLs can be specified in the environment variable
NDDS_QOS_PROFILES as well as in the field url_profile in PROFILE QosPol-
icy (DDS Extension) (Section 8.4.1). Each string URL must contain a whole XML
document.
Table 15.2 Supported Tag Values
Type Format Notes
DDS_Boolean
yes
a
, 1, true, BOOLEAN_TRUE
a
or
DDS_BOOLEAN_TRUE
a
: these all mean TRUE
Not case-sensitive
no
a
, 0, false, BOOLEAN_FALSE
a
or
DDS_BOOLEAN_FALSE
a
: these all mean
FALSE
DDS_Enum
A string. Legal values are those listed in the
online (HTML) documentation for the C
a
or
Java API.
Must be specified as a
string. (Do not use
numeric values.)
DDS_Long
-2147483648 to 2147483647
or 0x80000000 to 0x7fffffff
a
or LENGTH_UNLIMITED
or DDS_LENGTH_UNLIMITED
a
A 32-bit signed inte-
ger
DDS_UnsignedLong
0 to 4294967296
or
0 to 0xffffffff
a
A 32-bit unsigned
integer
String UTF-8 character string
All leading and trail-
ing spaces are ignored
between two tags
a. These values will not be considered valid if you use the distributed XSD document to do validation at
run-time with a code editor (see Section 15.6).

Chapter 15
15-10
❏ The string_profile field in the PROFILE QosPolicy (DDS Extension) (Section
8.4.1) allows you to split an XML document into multiple strings. For example:
const char * MyXML[4] =
{
"<dds>",
"<qos_library name=\"MyLibrary\">",
"</qos_library>",
"</dds>"
};
factoryQos.profile.string_profile.from_array(MyXML,4);
Only one XML document can be specified with the string_profile field.
15.6 How the XML is Validated
15.6.1 Validation at Run-Time
RTI Data Distribution Service validates the input XML files using a builtin Document
Type Definition (DTD).
You can find a copy of the builtin DTD in $(NDDSHOME)/resource/
qos_profiles_4.5x
1
/schema/rti_dds_qos_profiles.dtd. (This is only a copy of what the
RTI Data Distribution Service core uses. Changing this file has no effect unless you spec-
ify its path with the <!DOCTYPE> tag, described below.)
You can overwrite the builtin DTD by using the XML tag, <!DOCTYPE>. For example,
the following indicates that RTI Data Distribution Service must use a DTD file from a
user’s directory to perform validation:
<!DOCTYPE dds SYSTEM "/local/joe/rti/dds/mydds.dtd">
❏ The DTD path can be absolute, or relative to the application's current working
directory.
❏ If the specified file does not exist, you will see the following error:
RTIXMLDtdParser_parse:!open DTD file
❏ If you do not specify the DOCTYPE tag in the XML file, the builtin DTD is used.
1. x stands for the version letter of the current release.

15.6 How the XML is Validated
15-11
15. Configuring QoS
with XML
❏ The XML files used by RTI Data Distribution Service can be versioned using the
attribute version in the <dds> tag. For example:
<dds version="4.5x">
1
...
</dds>
Although the attribute version is not required during the validation process, it
helps to detect DTD incompatibility scenarios by providing better error mes-
sages.
For example, if an application using RTI Data Distribution Service 4.5x tries to
load an XML file from RTI Data Distribution Service 4.5z and there is some incom-
patibility in the XML content, the following parsing error will be printed:
ATTENTION: The version declared in this file (4.5z) is different
from the version of RTI Data Distribution Service (4.5x). If
these versions are not compatible, that incompatibility could be
the cause of this error
15.6.2 XML File Validation During Editing
RTI Data Distribution Service provides DTD and XSD files that describe the format of the
XML content. We recommend including a reference to one of these documents in the
XML file that contains the QoS profiles—this provides helpful features in code editors
such as Visual Studio and Eclipse, including validation and auto-completion while you
are editing the XML file.
The DTD and XSD definitions of the XML elements are in
$(NDDSHOME)/resource/qos_profiles_4.5x/schema/rti_dds_qos_profiles.dtd and
$(NDDSHOME)/resource/qos_profiles_4.5x/schema/rti_dds_qos_profiles.xsd,
respectively (in ‘4.5x’, x stands for the version letter of the current release).
To include a reference to the XSD document in your XML file, use the attribute
xsi:noNamespaceSchemaLocation in the <dds> tag. For example:
<?xml version="1.0" encoding="UTF-8"?>
<dds xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance"
xsi:noNamespaceSchemaLocation=
"<NDDSHOME
2
>/resource/qos_profiles_4.5x/schema/rti_dds_qos_profiles.xsd">
...
</dds>
1. x stands for the version letter of the current release.
2. Replace <NDDSHOME> with the installation directory of RTI Data Distribution Service.

Chapter 15
15-12
To include a reference to the DTD document in your XML file use the <!DOCTYPE> tag.
For example:
<?xml version="1.0" encoding="UTF-8"?>
<!DOCTYPE dds SYSTEM
"<NDDSHOME
2
>/resource/qos_profiles_4.5x/schema/rti_dds_qos_profiles.dtd">
<dds>
...
</dds>
We recommend including a reference to the XSD file in the XML documents because it
provides stricter validation and better auto-completion than the corresponding DTD
file.
15.7 Configuring QoS with XML
To configure the QoS for a DDS Entity using XML, use the following tags:
❏ <participant_qos>
❏ <publisher_qos>
❏ <subscriber_qos>
❏ <topic_qos>
❏ <datawriter_qos> or <writer_qos> (writer_qos is valid only with DTD valida-
tion)
❏ <datareader_qos> or <reader_qos> (reader_qos is valid only with DTD valida-
tion)
Each QoS can be identified by a name. The QoS can inherit its values from other QoSs
described in the XML file. For example:
<datawriter_qos name="DerivedWriterQos" base_name="Lib::BaseWriterQos">
<history>
<kind>KEEP_ALL_HISTORY_QOS</kind>
</history>
</datawriter_qos>
In the above example, the datawriter_qos named 'DerivedWriterQos' inherits the values
from 'BaseWriterQos' in the library 'Lib'. The HistoryQosPolicy kind is set to
KEEP_ALL_HISTORY_QOS.

15.7 Configuring QoS with XML
15-13
15. Configuring QoS
with XML
Each XML tag with an associated name can be uniquely identified by its fully qualified
name in C++ style.
The writer, reader and topic QoSs can also contain an attribute called topic_filter that
will be used to associate a set of topics to a specific QoS when that QoS is part of a QoS
profile. See Topic Filters (Section 15.8.3) and QoS Profiles (Section 15.8).
15.7.1 QosPolicies
The fields in a QosPolicy are described in XML using a 1-to-1 mapping with the equiva-
lent C representation. For example, the Reliability QosPolicy is represented with the fol-
lowing C structures:
struct DDS_Duration_t {
DDS_Long sec;
DDS_UnsignedLong nanosec;
}
struct DDS_ReliabilityQosPolicy {
DDS_ReliabilityQosPolicyKind kind;
DDS_Duration_t max_blocking_time;
}
The equivalent representation in XML is as follows:
<reliability>
<kind></kind>
<max_blocking_time>
<sec></sec>
<nanosec></nanosec>
</max_blocking_time>
</reliability>
15.7.2 Sequences
In general, sequences in QosPolicies are described with the following XML format:
<a_sequence_member_name>
<element>...</element>
<element>...</element>
...
</a_sequence_member_name>

Chapter 15
15-14
Each element of the sequence is enclosed in an <element> tag. For example:
<property>
<value>
<element>
<name>my name</name>
<value>my value</value>
</element>
<element>
<name>my name2</name>
<value>my value2</value>
</element>
</value>
</property>
A sequence without elements represents a sequence of length 0. For example:
<discovery>
<!-- initial_peers sequence contains zero elements -->
<initial_peers/>
</discovery>
For sequences that may have a default initialization that is not empty (such as the
initial_peers field in the DISCOVERY QosPolicy (DDS Extension) (Section 8.5.2)), using
the above construct would result in an empty list and not the default value
. So to simply
show a sequence for the sake of completeness, but not change its default value, com-
ment it out, as follows:
<discovery>
<!-- initial_peers sequence contains the default value -->
<!-- <initial_peers/> -->
</discovery>
Sequences defined in a derived
1
QoS will replace the corresponding sequences in the
base QoS. For example:
<participant_qos name="MyBaseQos">
<property>
<value>
<element>
<name>
dds.transport.UDPv4.builtin.send_socket_buffer_size
</name>
<value>524288</value>
</element>
1. The concepts of derived and base QoS are described in QoS-Profile Inheritance (Section 15.8.2).

15.7 Configuring QoS with XML
15-15
15. Configuring QoS
with XML
<element>
<name>
dds.transport.UDPv4.builtin.recv_socket_buffer_size
</name>
<value>2097152</value>
</element>
</value>
</property>
</participant_qos>
<participant_qos name="MyDerivedQos" base_name="MyBaseQos">
<property>
<value>
<element>
<name>
dds.transport.UDPv4.builtin.recv_socket_buffer_size
</name>
<value>1048576</value>
</element>
</value>
</property>
</qos_profile>
The property sequence defined in the participant QoS of MyDerivedProfile will contain
a single property named dds.transport.UDPv4.builtin.recv_socket_buffer_size, with a
value of 1048576. The property dds.transport.UDPv4.builtin.send_socket_buffer_size
will not be inherited.
As a special case, sequences of octets are represented with a single XML tag enclosing a
sequence of decimal/hexadecimal values between 0..255 separated with commas. For
example:
<user_data>
<value>100,200,0,0,0,223</value>
</user_data>
<topic_data>
<value>0xff,0x00,0x8e,0xEE,0x78</value>
</topic_data>

Chapter 15
15-16
15.7.3 Arrays
In general, the arrays contained in the QosPolicies are described with the following
XML format:
<an_array_member_name>
<element>...</element>
<element>...</element>
...
</an_array_member_name>
Each element of the array is enclosed in an <element> tag.
As a special case, arrays of octets are represented with a single XML tag enclosing an
array of decimal/hexadecimal values between 0..255 separated with commas. For
example:
<reader_qos>
...
<protocol>
<virtual_guid>
<value>1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16</value>
</virtual_guid>
</protocol>
</reader_qos>
15.7.4 Enumeration Values
Enumeration values are represented using their C or Java string representation. For
example:
<history>
<kind>DDS_KEEP_ALL_HISTORY_QOS</kind>
</history>
or
<history>
<kind>KEEP_ALL_HISTORY_QOS</kind>
</history>
When the XSD document is used for validation during editing (see Section 15.6.2), only
the Java representation is valid.

15.7 Configuring QoS with XML
15-17
15. Configuring QoS
with XML
15.7.5 Time Values (Durations)
You can use the following special values for fields that require seconds or nanoseconds:
❏ DURATION_INFINITE_SEC or DDS_DURATION_INFINITE_SEC,
❏ DURATION_ZERO_SEC or DDS_DURATION_ZERO_SEC,
❏ DURATION_INFINITE_NSEC or DDS_DURATION_INFINITE_NSEC
❏ DURATION_ZERO_NSEC or DDS_DURATION_ZERO_NSEC
For example:
<deadline>
<period>
<sec>DURATION_INFINITE_SEC</sec>
<nanosec>DURATION_INFINITE_NSEC</nanosec>
</period>
</deadline>
When the XSD document is used for validation during editing (see Section 15.6.2), only
the values without the DDS prefix are considered valid.
15.7.6 Transport Properties
You can configure transport plugins using the DomainParticipant’s PROPERTY QosPol-
icy (DDS Extension) (Section 6.5.15).
❏ Properties for the builtin transports are described in Setting Builtin Transport
Properties with the PropertyQosPolicy (Section 13.6).
❏ Properties for other transport plugins such as RTI TCP Transport
1
are described in
their respective chapters in this manual.
For example:
<participant_qos>
<property>
<value>
<element>
<name>dds.transport.UDPv4.builtin.parent.message_size_max
</name>
<value>65536</value>
</element>
1. RTI TCP Transport is included with RTI Data Distribution Service, but is not enabled by default.

Chapter 15
15-18
<element>
<name>dds.transport.UDPv4.builtin.send_socket_buffer_size
</name>
<value>131072</value>
</element>
<element>
<name>dds.transport.UDPv4.builtin.recv_socket_buffer_size
</name>
<value>262144</value>
</element>
</value>
</property>
</participant_qos>
15.7.7 Thread Settings
When thread priorities are configured using XML, the values are considered native pri-
orities. For example:
<thread>
<mask>STDIO|FLOATING_POINT</mask>
<priority>10</priority>
<stack_size>THREAD_STACK_SIZE_DEFAULT</stack_size>
</thread>
When the XML file is loaded using the Java API, the priority is a native priority, not a
Java thread priority.
15.8 QoS Profiles
A QoS profile groups a set of related QoS, usually one per entity, identified by a name.
For example:
<qos_profile name="StrictReliableCommunicationProfile">
<datawriter_qos>
<history>
<kind>KEEP_ALL_HISTORY_QOS</kind>
</history>
<reliability>
<kind>RELIABLE_RELIABILITY_QOS</kind>
</reliability>
</datawriter_qos>

15.8 QoS Profiles
15-19
15. Configuring QoS
with XML
<datareader_qos>
<history>
<kind>KEEP_ALL_HISTORY_QOS</kind>
</history>
<reliability>
<kind>RELIABLE_RELIABILITY_QOS</kind>
</reliability>
</datareader_qos>
</qos_profile>
Duplicate QoS profiles are not allowed. To overwrite a QoS profile, use QoS-Profile
Inheritance (Section 15.8.2).
There are functions that allow you to create DDS entities using profiles, such as
create_participant_with_profile() (Section 8.3.1), create_topic_with_profile()
(Section 5.1.1), etc.
If you create an entity using a profile without a QoS definition or an inherited QoS defi-
nition (see QoS-Profile Inheritance (Section 15.8.2)) for that class of entity, RTI Data Dis-
tribution Service uses the default QoS.
Example 1:
<qos_profile name="BatchStrictReliableCommunicationProfile"
base_name="StrictReliableCommunicationProfile">
<datawriter_qos>
<batch>
<enable>true</enable>
</batch>
</datawriter_qos>
</qos_profile>
The DataReader QoS value in the profile BatchStrictReliableCommunicationProfile is
inherited from the profile StrictReliableCommunicationProfile.
Example 2:
<qos_profile name="BatchProfile">
<datawriter_qos>
<batch>
<enable>true</enable>
</batch>
</datawriter_qos>
</qos_profile>
The DataReader QoS value in the profile BatchProfile is the default RTI Data Distribution
Service QoS.

Chapter 15
15-20
15.8.1 QoS Profiles with a Single QoS
The definition of an individual QoS outside a profile is a shortcut for defining a QoS
profile with a single QoS. For example:
<datawriter_qos name="KeepAllWriter">
<history>
<kind>KEEP_ALL_HISTORY_QOS</kind>
</history>
</datawriter_qos>
is equivalent to:
<qos_profile name="KeepAllWriter">
<datawriter_qos>
<history>
<kind>KEEP_ALL_HISTORY_QOS</kind>
</history>
</datawriter_qos>
</qos_profile>
15.8.2 QoS-Profile Inheritance
An individual QoS or profile can inherit values from other QoSs or profiles described in
the XML file by using the attribute, base_name.
Inheriting from other XML Files: A QoS or QoS Profile may inherit values from other
QoSs or QoS Profiles described in different XML files. A QoS or profile can only inherit
from other QoS policies or profiles that have already been loaded. The order in which
XML resources are loaded is described in Section 15.2.
The following examples show how to inherit from other profiles:
Example 1:
<qos_library name=”Library”>
<qos_profile name="BaseProfile">
<datawriter_qos>
...
</datawriter_qos>
<datareader_qos>
...
</datareader_qos>
</qos_profile>
<qos_profile name="DerivedProfile" base_name="BaseProfile">
<datawriter_qos>

15.8 QoS Profiles
15-21
15. Configuring QoS
with XML
...
</datawriter_qos>
<datareader_qos>
...
</datareader_qos>
</qos_profile>
</qos_library>
The writer_qos and reader_qos in DerivedProfile inherit their values from the corre-
sponding QoS in BaseProfile.
Example 2:
<qos_library name=”Library”>
<datareader_qos name="BaseProfile">
...
</datareader_qos>
<datareader_qos name="DerivedProfile" base_name="BaseProfile">
...
</datareader_qos>
</qos_library>
The datareader_qos in DerivedProfile inherits its values from the datareader_qos of
BaseProfile. In this example, the datareader_qos definition is a shortcut for a profile def-
inition with a single QoS (see Section 15.8.1).
Example 3:
<qos_library name=”Library”>
<qos_profile name="Profile1">
<datawriter_qos name="BaseWriterQoS">
...
</datawriter_qos>
<datareader_qos>
...
</datareader_qos>
</qos_profile>
<qos_profile name="Profile2">
<datawriter_qos name="DerivedWriterQos"
base_name="Profile1::BaseWriterQos">
...
</datawriter_qos>
<datareader_qos>
...
</datareader_qos>
</qos_profile>

Chapter 15
15-22
</qos_library>
The datawriter_qos in Profile2 inherits its values from the datawriter_qos in Profile1.
The datareader_qos in Profile2 will not inherit the values from the corresponding QoS
in Profile1.
Example 4:
<qos_library name=”Library”>
<qos_profile name="Profile1">
<datawriter_qos>
...
</datawriter_qos>
<datareader_qos>
...
</datareader_qos>
</qos_profile>
<qos_profile name="Profile2">
<datawriter_qos name="BaseWriterQoS">
...
</datawriter_qos>
<datareader_qos>
...
</datareader_qos>
</qos_profile>
<qos_profile name="Profile3" base_name="Profile1">
<datawriter_qos name="DerivedWriterQos"
base_name="Profile2::BaseWriterQos">
...
</datawriter_qos>
<datareader_qos>
...
</datareader_qos>
</qos_profile>
</qos_library></qos_library>
The datawriter_qos in Profile3 inherits its values from the datawriter_qos in Profile2.
The datareader_qos in Profile3 inherits its values from the datareader_qos in Profile1.

15.8 QoS Profiles
15-23
15. Configuring QoS
with XML
Example 5:
<qos_library name=”Library”>
<datareader_qos name="BaseProfile">
...
</datareader_qos>
<profile name="DerivedProfile" base_name="BaseProfile">
<datareader_qos>
...
</datareader_qos>
</profile>
</qos_library>
The datareader_qos in DerivedProfile inherits its values from the datareader_qos in
BaseProfile.
15.8.3 Topic Filters
A QoS profile may contain several writer, reader and topic QoSs. RTI Data Distribution
Service will select a QoS based on the evaluation of a filter expression on the topic name.
The filter expression is specified as an attribute in the XML QoS definition. For example:
<qos_profile name="StrictReliableCommunicationProfile">
<datawriter_qos topic_filter="A*">
<history>
<kind>KEEP_ALL_HISTORY_QOS</kind>
</history>
<reliability>
<kind>RELIABLE_RELIABILITY_QOS</kind>
</reliability>
</datawriter_qos>

Chapter 15
15-24
<datawriter_qos topic_filter="B*">
<history>
<kind>KEEP_ALL_HISTORY_QOS</kind>
</history>
<reliability>
<kind>RELIABLE_RELIABILITY_QOS</kind>
</reliability>
<resource_limits>
<max_samples>128</max_samples>
<max_samples_per_instance>128</max_samples_per_instance>
<initial_samples>128</initial_samples>
<max_instances>1</max_instances>
<initial_instances>1</initial_instances>
</resource_limits>
</datawriter_qos>
…
</qos_profile>
If topic_filter is not specified in a QoS, RTI Data Distribution Service will assume the fil-
ter '*'. The QoSs with an explicit topic_filter attribute definition will be evaluated in
order; they have precedence over a QoS without a topic_filter expression.
The topic_filter attribute is only used with the following APIs:
DomainParticipantFactory:
❏ get_<entity>_qos_from_profile_w_topic_name() (where <entity> may be topic,
datareader, or datareader; see Section 8.2.5)
DomainParticipant:
❏ create_datawriter_with_profile() (see Creating DataWriters (Section 6.3.1))
❏ create_datareader_with_profile() (see Creating DataReaders (Section 7.3.1)
❏ create_topic_with_profile() (see Creating Topics (Section 5.1.1))
Publisher:
❏ create_datawriter_with_profile() (see Creating DataWriters (Section 6.3.1))
Subscriber:
❏ create_datareader_with_profile() (see Creating DataReaders (Section 7.3.1))
Topic:
❏ set_qos_with_profile() (see Setting Topic QosPolicies (Section 5.1.3))

15.8 QoS Profiles
15-25
15. Configuring QoS
with XML
DataWriter:
❏ set_qos_with_profile() (see Changing QoS Settings After the Publisher Has
Been Created (Section 6.2.4.2))
DataReader:
❏ set_qos_with_profile() (see Setting DataReader QosPolicies (Section 7.3.7))
Other APIs will ignore QoSs with a topic_filter value different than "*". A QoS Profile
with QoSs using topic_filter can also inherits from other QoS Profiles. In this case,
inheritance will consider the value of the topic_filter expression.
Example 1:
<qos_library name=”Library”>
<qos_profile name="BaseProfile">
<datawriter_qos>
...
</datawriter_qos>
<datawriter_qos topic_filter="T1*">
...
</datawriter_qos>
<datawriter_qos topic_filter="T2*">
...
</datawriter_qos>
</qos_profile>
<qos_profile name="DerivedProfile" base_name="BaseProfile">
<datawriter_qos topic_filter="T11">
...
</datawriter_qos>
<datawriter_qos topic_filter="T21">
...
</datawriter_qos>
<datawriter_qos topic_filter="T31">
...
</datawriter_qos>
</qos_profile>
</qos_library>
The datawriter_qos with topic_filter T11 in DerivedProfile will inherit its values from
the datawriter_qos with topic_filter T1* in BaseProfile. The datawriter_qos with
topic_filter T21 in DerivedProfile will inherit its values from the datawriter_qos with
topic_filter T2* in BaseProfile. The datawriter_qos with topic_filter T31 in DerivedPro-
file will inherit its values from the datawriter_qos without topic_filter in BaseProfile.

Chapter 15
15-26
Example 2:
<qos_library name=”Library”>
<qos_profile name="BaseProfile">
<datawriter_qos topic_filter="T1*">
...
</datawriter_qos>
<datawriter_qos name="T2DataWriterQoS" topic_filter="T2*">
...
</datawriter_qos>
</qos_profile>
<qos_profile name="DerivedProfile" base_name="BaseProfile">
<datawriter_qos topic_filter="T11"
base_name="BaseProfile::T2DataWriterQoS">
...
</datawriter_qos>
<datawriter_qos topic_filter="T21">
...
</datawriter_qos>
</qos_profile>
</qos_library>
Although the topic_filter expressions do not match, the datawriter_qos with
topic_filter T11 in DerivedProfile will inherit its values from the datawriter_qos with
topic_filter T2* in BaseProfile. topic_filter is not used with inheritance from QoS to
QoS. The datawriter_qos with topic_filter T21 in DerivedProfile will inherit its values
from the datawriter_qos with topic_filter T2* in BaseProfile.
Example 3:
<qos_library name=”Library”>
<datawriter_qos name="BaseQos" topic_filter="T1">
...
</datawriter_qos>
<datawriter_qos name="DerivedQos" base_name="BaseQos"
topic_filter="T2">
...
</datawriter_qos>
</qos_library>
In the case of a single QoS profile, although the topic_filter expressions do not match,
the datawriter_qos named DerivedQos with topic_filter T2 will inherit its values from
the datawriter_qos named BaseQos with topic_filter T1.

15.8 QoS Profiles
15-27
15. Configuring QoS
with XML
15.8.4 Overwriting Default QoS Values
There are two ways to overwrite the default QoS used for new entities with values from
a profile: programmatically and with an XML attribute.
❏ You can overwrite the default QoS programmatically with
set_default_<entity>_qos_with_profile() (where <entity> is participant, topic,
publisher, subscriber, datawriter, or datareader)
❏ You can overwrite the default QoS using the XML attribute is_default_qos with
the <qos_profile> tag
In the following example, the DataWriter and DataReader default QoS will be overwrit-
ten with the values specified in a profile named ‘StrictReliableCommunicationProfile’:
<qos_profile name="StrictReliableCommunicationProfile"
is_default_qos="true">
<datawriter_qos>
<history>
<kind>KEEP_ALL_HISTORY_QOS</kind>
</history>
<reliability>
<kind>RELIABLE_RELIABILITY_QOS</kind>
</reliability>
</datawriter_qos>
<datareader_qos>
<history>
<kind>KEEP_ALL_HISTORY_QOS</kind>
</history>
<reliability>
<kind>RELIABLE_RELIABILITY_QOS</kind>
</reliability>
</datareader_qos>
</qos_profile>
If multiple profiles are configured to overwrite the default QoS, only the last one parsed
applies.
Example:
In this example, the profile used to configure the default QoSs will be StrictReliable-
CommunicationProfile.
<qos_profile name="BestEffortCommunicationProfile"
is_default_qos="true">
...
</qos_profile>
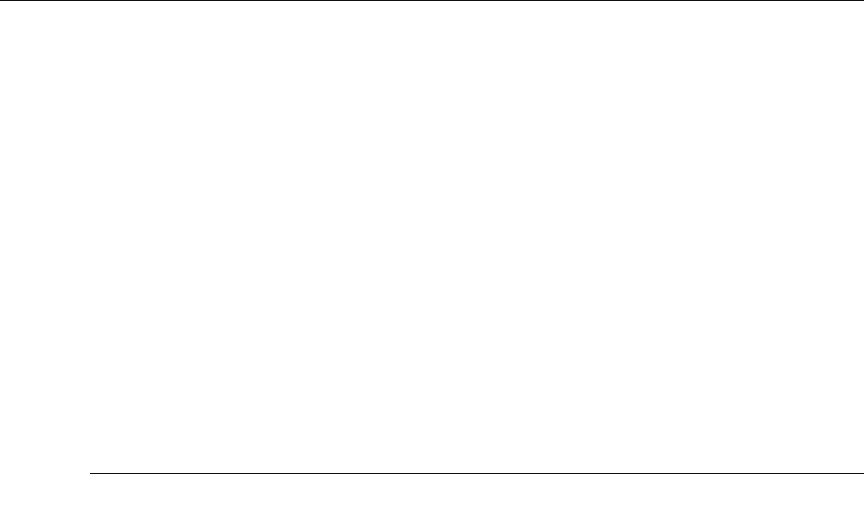
Chapter 15
15-28
<qos_profile name="StrictReliableCommunicationProfile"
is_default_qos="true">
...
</qos_profile>
15.8.5 Get Qos Profiles
To get a list of loaded QoS profiles, call the DomainParticipantFactory’s
get_qos_profiles() operation, which returns the names of all profiles within a specified
QoS library. Either the input QoS library name must be specified or the default profile
library must have been set prior to calling this function.
DDS_ReturnCode_t get_qos_profiles (
struct DDS_StringSeq *profile_names,
const char *library_name)
15.9 QoS Libraries
A QoS Library is a named set of QoS profiles.
One configuration file may have several QoS libraries, each one defining its own QoS
profiles.

15.9 QoS Libraries
15-29
15. Configuring QoS
with XML
All QoS libraries must be declared within <dds> and </dds> tags. For example:
<dds>
<qos_library name="RTILibrary">
<!-- Individual QoSs are shortcuts for QoS Profiles with 1 QoS -->
<datawriter_qos name="KeepAllWriter">
<history>
<kind>KEEP_ALL_HISTORY_QOS</kind>
</history>
</datawriter_qos>
<!-- Qos Profile -->
<qos_profile name="StrictReliableCommunicationProfile">
<datawriter_qos>
<history>
<kind>KEEP_ALL_HISTORY_QOS</kind>
</history>
<reliability>
<kind>RELIABLE_RELIABILITY_QOS</kind>
</reliability>
</datawriter_qos>
<datareader_qos>
<history>
<kind>KEEP_ALL_HISTORY_QOS</kind>
</history>
<reliability>
<kind>RELIABLE_RELIABILITY_QOS</kind>
</reliability>
</datareader_qos>
</qos_profile>
</qos_library>
</dds>
A QoS library can be reopened within the same configuration file or across different
configuration files. For example:

Chapter 15
15-30
<dds>
<qos_library name="RTILibrary">
...
</qos_library>
...
<qos_library name="RTILibrary">
...
</qos_library>
</dds>
15.9.1 Get Qos Profile Libraries
To get a list of available QoS libraries, call the DomainParticipantFactory’s
get_qos_profile_libraries() operation, which returns the names of all QoS libraries that
have been loaded by RTI Data Distribution Service.
DDS_ReturnCode_t get_qos_profile_libraries (
struct DDS_StringSeq *profile_names)
15.10 URL Groups
To provide redundancy and fault tolerance, you can specify multiple locations for a sin-
gle XML document via URL groups. The syntax of a URL group is:
[URL1 | URL2 | URL2 | ... | URLn]
For example:
[file:///usr/local/default_dds.xml | file:///usr/local/
alternative_default_dds.xml]
Only one of the elements in the group will be loaded by RTI Data Distribution Service,
starting from the left.
Brackets are not required for groups with a single URL.
The NDDS_QOS_PROFILES environment variable contains a set of URL groups sepa-
rated by semicolons. For example, on Linux and Solaris systems:
setenv NDDS_QOS_PROFILES [file:///usr/local/default_dds.xml|file:///
usr/local/alternative_default_dds.xml];[str://"<dds><qos_library
name="MyQosLibrary"></qos_library></dds>"]


Chapter 15
15-32

16-1
16. Multi-channel
DataWriters
Chapter 16 Multi-channel DataWriters
In RTI Data Distribution Service, producers publish data to a Top ic , identified by a topic
name; consumers subscribe to a Topic and optionally to specific content by means of a
content-filter expression.
The middleware’s efficient implementation of content-filtering is critical for scenarios
such as the above "Market Data" example, where there are large numbers of consumers,
large volumes of data, or Topics that transmit information about many data-objects or
subjects (e.g., individual stocks).
Traditionally, middleware products use four approaches to implement content filtering:
Producer-based, Consumer-based, Server-based, and Network Switch-based.
❏ Producer-based approaches push the burden of filtering to the producer side.
The producer knows what each consumer wants and delivers to the consumer
only the data that matches the consumer's filter. This approach is suitable when
using point-to-point protocols such as TCP—it saves bandwidth and lowers the
load on the consumer—but it does not work if data is distributed via multicast.
Also, this approach does not scale to large numbers of consumers, because the
producer would be overburdened by the need to filter for each individual con-
sumer.
A Market Data Example:
A producer can publish data on the Topic "MarketData" which can be defined as a
structured record containing fields that identify the exchange (e.g., "NYSE" or "NAS-
DAQ"), the stock symbol (e.g., "APPL" or "JPM"), volume, bid and ask prices, etc.
Similarly, a consumer may want to subscribe to data on the "MarketData" Topic, but
only if the exchange is "NYSE" or the symbol starts with the letter "M." Or the con-
sumer may want all the data from the "NYSE" whose volume exceeds a certain thresh-
old, or may want MarketData for a specific stock symbol, regardless of the exchange,
and so on.

Chapter 16
16-2
❏ Consumer-based approaches push the burden of filtering to the consumer side.
The producer sends all the data to every consumer and the middleware on the
consumer side decides whether the application wants it or not, automatically fil-
tering the unwanted data. This approach is simple and fits well in systems that
use multicast protocols as a transport. But the approach is not efficient for con-
sumers that want small subsets of the data, since the consumers have to spend a
lot of time filtering unwanted data. This approach is also unsuitable for systems
with large volumes of data, such as the above Market Data system.
❏ Server-based approaches push the burden of filtering to a third component: a
server or broker. This approach has some scalability advantages—the server can
be run on a more powerful computer and can be federated to handle a large
number of consumers. Some providers also provide hardware-assisted filtering
in the server. However, the server-based approach significantly increases latency
and jitter. It is also far more expensive to deploy and manage.
❏ Network Switch-based approaches leverage the network hardware, specifically
advanced (IGMP snooping) network switches, to offload most of the burden of
filtering from the producers and consumers without introducing additional
hardware, servers or proxies. This approach preserves the low latency and ease
of deployment of the brokerless approaches while still providing most of the off-
loading and scalability benefits of the broker.
RTI supports the producer-based, consumer-based and network-switch approaches to
content filtering:
❏ RTI automatically uses the producer-based and consumer-based approaches as
soon as it detects a consumer that specifies a content filter. The producer-based
approach is used if the consumer is receiving data over a point-to-point protocol
(i.e., not multicast) and the number of consumers that specify filters is reason-
ably low (below 32). Otherwise, RTI uses a subscriber-based approach.
❏ To use the more scalable network-switched based approach, an application must
configure the DataWriter as a Multi-channel DataWriter. This concept is described
in the following section.

16.1 What is a Multi-channel DataWriter?
16-3
16. Multi-channel
DataWriters
16.1 What is a Multi-channel DataWriter?
A Multi-channel DataWriter is a DataWriter that is configured to send data over multiple
multicast addresses, according to some filtering criteria applied to the data.
To determine which multicast addresses will be used to send the data, the middleware
evaluates a set of filters that are configured for the DataWriter. Each filter "guards" a
channel—a set of multicast addresses. Each time a multi-channel DataWriter writes data,
the filters are applied. If a filter evaluates to true, the data is sent over that filter’s associ-
ated channel (set of multicast addresses). We refer to this type of filter as a Channel
Guard filter.
Figure 16.1 Multi-channel Data Flow

Chapter 16
16-4
Multi-channel DataWriters can be used to trade off network bandwidth with the unnec-
essary processing of unwanted data for situations where there are multiple DataReaders
who are interested in different subsets of data that come from the same data stream
(Topic). For example, in Financial applications, the data stream may be quotes for differ-
ent stocks at an exchange. Applications usually only want to receive data (quotes) for
only a subset of the stocks being traded. In tracking applications, a data stream may
carry information on hundreds or thousands of objects being tracked, but again, appli-
cations may only be interested in a subset.
The problem is that the most efficient way to deliver data to multiple applications is to
use multicast so that a data value is only sent once on the network for any number of
subscribers to the data. However, using multicast, an application will receive all of the
data sent and not just the data in which it is interested, thus extra CPU time is wasted to
throw away unwanted data. With this QoS, you can analyze the data-usage patterns of
your applications and optimize network vs. CPU usage by partitioning the data into
multiple multicast streams. While network bandwidth is still being conserved by send-
ing data only once using multicast, most applications will only need to listen to a subset
of the multicast addresses and receive a reduced amount of unwanted data.
Figure 16.2 Multi-channel Evaluation

16.2 How to Configure a Multi-channel DataWriter
16-5
16. Multi-channel
DataWriters
Note: Your system can gain more of the benefits of using multiple multicast groups if
your network uses Layer 2 Ethernet switches. Layer 2 switches can be configured to
only route multicast packets to those ports that have added membership to specific mul-
ticast groups. Using those switches will ensure that only the multicast packets used by
applications on a node are routed to the node; all others are filtered-out by the switch.
16.2 How to Configure a Multi-channel DataWriter
To configure a multi-channel DataWriter, simply define a list of all its channels in the
DataWriter’s MULTI_CHANNEL QosPolicy (DDS Extension) (Section 6.5.12).
Each channel consists of filter criterion to apply to the data and a set of multicast destina-
tions (transport, address, port) that will be used for sending data that matches the filter.
You can think of this sequence of channels as a table like the one shown below:
The example C++ code in Figure 16.3 on page 6 shows how to configure the channels.
The MULTI_CHANNEL QosPolicy is propagated along with discovery traffic. The
value of this policy is available in the builtin topic for the publication (see the
locator_filter field in Table 14.2, “Publication Built-in Topic’s Data Type
(DDS_PublicationBuiltinTopicData),” on page 14-3).
16.2.1 Limitations
When considering use of a multi-channel DataWriter, please be aware of the following
limitations:
❏ A DataWriter that uses the MULTI_CHANNEL QosPolicy will ignore multicast
and unicast addresses specified on the reader side through the
TRANSPORT_MULTICAST QosPolicy (DDS Extension) (Section 7.6.5) and
TRANSPORT_UNICAST QosPolicy (DDS Extension) (Section 6.5.21). The
DataWriter will not publish samples on these locators.
If the Data Matches this Filter... Send the Data to these Multicast Destinations
Symbol MATCH '[A-K]* UDPv4:225.0.0.1:9000
Symbol MATCH '[L-Q]* UDPv4:225.0.0.2:9001
Symbol MATCH '[P-Z]* UDPv4:225.0.0.3:9002; 225.0.0.4:9003;

Chapter 16
16-6
❏ Multi-channel DataWriters cannot be configured to use the Durable Writer His-
tory feature (described in Section 11.3).
❏ Multi-channel DataWriters do not support fragmentation of large data.
❏ Multi-channel DataWriters cannot be configured for asynchronous publishing
(described in Section 6.4.1).
Figure 16.3 Using the MULTI_CHANNEL QosPolicy
// initialize writer_qos with default values
publisher->get_default_datawriter_qos(writer_qos);
// Initialize MULTI_CHANNEL Qos Policy
// Assign the filter name
// Possible options: DDS_STRINGMATCHFILTER_NAME, DDS_SQLFILTER_NAME
writer_qos.multi_channel.filter_name = (char*) DDS_STRINGMATCHFILTER_NAME;
// Create two channels
writer_qos.multi_channel.channels.ensure_length(2,2);
// First channel
writer_qos.multi_channel.channels[0].filter_expression =
DDS_String_dup("Symbol MATCH '[A-M]*'");
writer_qos.multi_channel.channels[0].multicast_settings.ensure_length(1,1);
writer_qos.multi_channel.channels[0].multicast_settings[0].receive_port =
8700;
writer_qos.multi_channel.channels[0].multicast_settings[0].receive_address =
DDS_String_dup("239.255.1.1");
// Second channel
writer_qos.multi_channel.channels[1].multicast_settings.ensure_length(1,1);
writer_qos.multi_channel.channels[1].multicast_settings[0].receive_port =
8800;
writer_qos.multi_channel.channels[1].multicast_settings[0].receive_address =
DDS_String_dup("239.255.1.2");
writer_qos.multi_channel.channels[1].filter_expression =
DDS_String_dup("Symbol MATCH '[N-Z]*'");
// Create writer
writer = publisher->create_datawriter(
topic, writer_qos, NULL, DDS_STATUS_MASK_NONE);

16.3 Multi-channel Configuration on the Reader Side
16-7
16. Multi-channel
DataWriters
❏ Multi-channel DataWriters rely on the rtps_object_id in the
DATA_WRITER_PROTOCOL QosPolicy (DDS Extension) (Section 6.5.2) to be
DDS_RTPS_AUTO_ID (which causes automatic assignment of object IDs to
channels).
❏ To guarantee reliable delivery, a DataReader's PRESENTATION QosPolicy (Sec-
tion 6.4.6) must be set to per-instance ordering
(DDS_INSTANCE_PRESENTATION_QOS, the default value), instead of per-
topic ordering (DDS_TOPIC_PRESENTATION_QOS), and the matching
DataWriter's MULTI_CHANNEL QosPolicy (DDS Extension) (Section 6.5.12)
must use expressions that only refer to key fields.
16.3 Multi-channel Configuration on the Reader Side
No special changes are required in a subscribing application to get data from a multi-
channel DataWriter.
If you want the DataReader to subscribe to only a subset of the channels, use a Content-
FilteredTopic, as described in Section 5.4. For example:
// Create a content filtered topic
contentFilter = participant->create_contentfilteredtopic_with_filter(
"FilteredTopic",
topic,
"symbol MATCH 'NYE/BAC,NASDAQ/MSFT,NASDAQ/GOOG",
parameters,
DDS_STRINGMATCHFILTER_NAME);
// Create a DataReader that uses the content filtered topic
reader = subscriber->create_datareader(
contentFilter,
DDS_DATAREADER_QOS_DEFAULT,
NULL,0);
From there, RTI Data Distribution Service takes care of all the necessary steps:
❏ The DataReader automatically discovers all the DataWriters—including multi-
channel DataWriters—for the Topic it subscribes to.
❏ When the DataReader discovers a multi-channel DataWriter, it also discovers the
list of channels used by that DataWriter.

Chapter 16
16-8
❏ When the multi-channel DataWriter discovers a DataReader, it also discovers the
content filters specified by that DataReader, if any.
With all this information, RTI Data Distribution Service automatically determines which
channels are of "interest" to the DataReader.
A DataReader is interested in a channel if and only if the set of data values for which the
channel guard filter evaluates to TRUE intersects the set of data values for which the
DataReader's content filter evaluates to TRUE. If a DataReader does not use a content fil-
ter, then it is interested in all the channels.
Figure 16.4 Filter Intersection
In this scenario, the DataReader is interested in Channel1 and Channel2, but not Channel3.
16.4 Where Does the Filtering Occur?
16-9
16. Multi-channel
DataWriters
16.4 Where Does the Filtering Occur?
If Multi-channel DataWriters are used, the filtering can occur in three places:
❏ Filtering at the DataWriter (Section 16.4.1)
❏ Filtering at the DataReader (Section 16.4.2)
❏ Filtering on the Network Hardware (Section 16.4.3)
16.4.1 Filtering at the DataWriter
Each time data is written, the DataWriter evaluates each of the channel guard filters to
determine which channels will transmit the data. This filtering occurs on the DataWriter.
Filtering on the DataWriter side is scalable because the number of filter evaluations
depends only on the number of channels, not on the number of DataReaders. Usually, the
number of channels is smaller than the number of possible DataReaders.
Market Data Example, continued:
If the channel guard filter for Channel 1 is 'Symbol MATCH '[A-K]*' then the
channel will only transfer data for stocks whose symbol starts with a letter in
the A to K range.
That is, it will transfer data on 'APPL', "GOOG', and 'IBM', but not on 'MSFT',
'ORCL', or 'YHOO'. Channel 1 will be of interest to DataReaders whose content
filter includes at least one stock whose symbol starts with a letter in the A to K
range.
A DataReader that specifies a content filter such as "Symbol MATCH 'IBM,
YHOO' " will be interested in Channel1.
A DataReader that specifies a content filter such as "Symbol MATCH '[G-M]*'"
will also be interested in Channel1.
A DataReader that specifies a content filter such as "Symbol MATCH '[M-T]*' "
will not be interested in Channel1.

Chapter 16
16-10
As explained in Section 16.7, if the channel guard filters are configured to only look at
the "key" fields in the data, the channel filtering becomes a very efficient lookup opera-
tion.
16.4.2 Filtering at the DataReader
The DataReader will listen on the multicast addresses that correspond to the channels of
interest (see Section 16.3). When a channel is 'of interest', it means that it is possible for
the channel to transmit data that meets the content filter of the DataReader, however the
channel may also transmit data that does not pass the DataReader's content filter. There-
fore, the DataReader has to filter all incoming data on that channel to determine if it
passes its content filter.
As explained in Section 16.7, if the DataReader’s content filters are configured to only
look at the "key" fields in the data, the DataReader filtering becomes a very efficient
lookup operation.
16.4.3 Filtering on the Network Hardware
DataReaders will only listen to multicast addresses that correspond to the channels of
interest. The multicast traffic generated in other channels will be filtered out by the net-
work hardware (routers, switches).
Layer 3 routers will only forward multicast traffic to the actual destination ports. How-
ever, by default, layer 2 switches treat multicast traffic as broadcast traffic. To take
advantage of network filtering with layer 2 devices, they must be configured with IGMP
snooping enabled (see Section 16.7.1).
Market Data Example, continued:
Channel 1, identified by guard filter "Symbol MATCH '[A-M]*'", will be of
interest to DataReaders whose content filter includes at least one stock whose
symbol starts with a letter in the A to K range.
A DataReader with content filter "Symbol MATCH 'GOOG'" will listen on
Channel1.
In addition to 'GOOG', the DataReader will also receive samples corresponding
to stock symbols such as 'MSFT' and 'APPL'. The DataReader must filter these
samples out.
16.5 Fault Tolerance and Redundancy
16-11
16. Multi-channel
DataWriters
16.5 Fault Tolerance and Redundancy
To achieve fault tolerance and redundancy, configure the DataWriter’s
MULTI_CHANNEL QosPolicy (DDS Extension) (Section 6.5.12) to publish a sample
over multiple channels or over different multicast addresses within a single channel.
Figure 16.5 shows how to use overlapping channels.
If a sample is published to multiple multicast addresses, a DataReader may receive mul-
tiple copies of the sample. By default, duplicates are discarded by the DataReader and
not provided to the application. To change this default behavior, use the Durable Reader
State property, dds.data_reader.state.filter_redundant_samples (see Section 11.4.2).
Figure 16.5 Using the MULTI_CHANNEL QosPolicy with Overlapping Channels
// initialize writer_qos with default values
publisher->get_default_datawriter_qos(writer_qos);
// Initialize MULTI_CHANNEL Qos Policy
// Assign the filter name
// Possible options: DDS_STRINGMATCHFILTER_NAME and DDS_SQLFILTER_NAME
writer_qos.multi_channel.filter_name = (char*) DDS_STRINGMATCHFILTER_NAME;
// Create two channels
writer_qos.multi_channel.channels.ensure_length(2,2);
// First channel
writer_qos.multi_channel.channels[0].filter_expression =
DDS_String_dup("Symbol MATCH '[A-M]*'");
writer_qos.multi_channel.channels[0].multicast_settings.ensure_length(2,2);
writer_qos.multi_channel.channels[0].multicast_settings[0].receive_port = 8700;
writer_qos.multi_channel.channels[0].multicast_settings[0].receive_address =
DDS_String_dup("239.255.1.1");
// Second channel
writer_qos.multi_channel.channels[1].multicast_settings.ensure_length(1,1);
writer_qos.multi_channel.channels[1].multicast_settings[0].receive_port = 8800;
writer_qos.multi_channel.channels[1].multicast_settings[0].receive_address =
DDS_String_dup("239.255.1.2");
writer_qos.multi_channel.channels[1].filter_expression =
DDS_String_dup("Symbol MATCH '[C-Z]*'");
// Symbols starting with [C-M] will be published in two different channels
// Create writer
writer = publisher->create_datawriter(
topic, writer_qos, NULL, DDS_STATUS_MASK_NONE);

Chapter 16
16-12
16.6 Reliability with Multi-Channel DataWriters
16.6.1 Reliable Delivery
Reliable delivery is only guaranteed when the access_scope in the Subscriber's PRESEN-
TATION QosPolicy (Section 6.4.6) is set to DDS_INSTANCE_PRESENTATION_QOS
(default value) and the filters in the DataWriter's MULTI_CHANNEL QosPolicy (DDS
Extension) (Section 6.5.12)) are keyed-only based.
If any of the guard filters are based on non-key fields, RTI Data Distribution Service only
guarantees reception of the most recent data from the multi-Channel DataWriter.
16.6.2 Reliable Protocol Considerations
Reliability is maintained on a per-channel basis. Each channel has its own reliability
channel send queue. The size of that queue is limited by max_samples in the
RESOURCE_LIMITS QosPolicy (Section 6.5.18) and/or max_batches in
DATA_WRITER_RESOURCE_LIMITS QosPolicy (DDS Extension) (Section 6.5.3). The
protocol parameters described in the DATA_WRITER_PROTOCOL QosPolicy (DDS
Extension) (Section 6.5.2) are applied per channel, with the following exceptions:
❏ low_watermark and high_watermark: The low watermark and high watermark
control the queue levels (in number of samples) that determine when to switch
between regular and fast heartbeat rates (see Section 6.5.2.1). With multi-channel
Market Data Example, continued:
Given the following IDL description for our MarketData topic type:
Struct MarketData {
string<255> Symbol; //@key
double Price;
}
A guard filter "Symbol MATCH 'APPL'" is keyed-only based.
A guard filter "Symbol MATCH 'APPL' and Price < 100" is not keyed-only
based.

16.7 Performance Considerations
16-13
16. Multi-channel
DataWriters
DataWriters, high_watermark and low_watermark refer to the DataWriter’s
queue (not the reliability channel queue). Therefore, periodic heartbeating can-
not be controlled on a per-channel basis.
Important: With multi-channel DataWriters, low_watermark and
high_watermark refer to application samples even if batching is enabled. This
behavior differs from the one without multi-channel DataWriters (where
low_watermark and high_watermark refer to batches).
❏ heartbeats_per_max_samples: This field defines the number of heartbeats per
send queue. For multi-channel DataWriters, the value is applied per channel.
However, the send queue size that is used to calculate the a piggyback heartbeat
rate is defined per DataWriter (see max_samples in RESOURCE_LIMITS QosPol-
icy (Section 6.5.18)).
Important: With multi-channel DataWriters, heartbeats_per_max_samples refers
to samples even if batching is enabled. This behavior differs from the one with-
out multi-channel DataWriters (where heartbeats_per_max_samples refers to
batches, Section 6.5.2).
With batching and multi-channel DataWriters, the size of the DataWriter’s send queue
should be configured using max_samples (in RESOURCE_LIMITS QosPolicy (Section
6.5.18)) instead of max_batches (in DATA_WRITER_RESOURCE_LIMITS QosPolicy
(DDS Extension) (Section 6.5.3)) in order to take advantage of
heartbeats_per_max_samples.
16.7 Performance Considerations
16.7.1 Network-Switch Filtering
By default, multicast traffic is treated as broadcast traffic by layer 2 switches. To avoid
flooding the network with broadcast traffic and take full advantage of network filtering,
the layer 2 switches should be configured to use IGMP snooping. Refer to your switch’s
manual for specific instructions.

Chapter 16
16-14
When IGMP snooping is enabled, a switch can route a multicast packet to just those
ports that subscribe to it, as seen in Figure 16.6.
16.7.2 DataWriter and DataReader Filtering
Where Does the Filtering Occur? (Section 16.4) describes the three places where filtering
can occur with Multi-channel DataWriters. To improve performance when filtering
occurs on the reader and/or writer sides, use filter expressions that are only based on
keys (see Section 2.2.2). Then the results of the filter are cached in a hash table on a per-
key basis.
You can also improve performance by increasing the number of buckets associated with
the hash table. To do so, use the instance_hash_buckets field in the
RESOURCE_LIMITS QosPolicy (Section 6.5.18) on both the writer and reader sides. A
higher number of buckets will provide better performance, but requires more resources.
Figure 16.6 IGMP Snooping
Market Data Example, continued:
The filter expressions in the Market Data example are based on the value of
the field, Symbol. To make filter operations on this field more efficient, declare
Symbol as a key. For example:
struct {
string<MAX_SYMBOL_SIZE> Symbol; //@key
}

17-1
17. Threading Model
Chapter 17 RTI Data Distribution Service Threading
Model
This chapter describes the internal threads that RTI Data Distribution Service uses for
sending and receiving data, maintaining internal state, and calling user code when
events occur such as the arrival of new data samples. It may be important for you to
understand how these threads may interact with your application.
An RTI Data Distribution Service DomainParticipant uses three types of threads. The
actual number of threads depends on the configuration of various QosPolicies as well as
the implementation of the transports used by the DomainParticipant to send and receive
data.
❏ Database Thread (Section 17.1)
❏ Event Thread (Section 17.2)
❏ Receive Threads (Section 17.3)
❏ Exclusive Areas, RTI Data Distribution Service Threads and User Listeners (Sec-
tion 17.4)
❏ Controlling CPU Core Affinity for RTI Threads (Section 17.5)
Through various QosPolicies, the user application can configure the priorities and other
properties of the threads created by RTI Data Distribution Service. In real-time systems,
the user often needs to set the priorities of all threads in an application relative to each
other for the proper operation of the system.

Chapter 17
17-2
17.1 Database Thread
RTI Data Distribution Service uses internal data structures to store information about
locally-created and remotely-discovered DDS Entities. In addition, it will store various
objects and data used by RTI Data Distribution Service for maintaining proper communi-
cations between applications. This “database” is created for each DomainParticipant.
As Entities and objects are created and deleted during the normal operation of the user
application, different entries in the database may be created and deleted as well.
Because multiple threads may access objects stored in the database simultaneously, the
deletion and removal of an object from the database happens in two phases to support
thread safety.
When an entry/object in the database is deleted either through the actions of user code
or as a result of a change in system state, it is only marked for deletion. It cannot be actu-
ally deleted and removed from the database until RTI Data Distribution Service can be
sure that no threads are still accessing the object. Instead, the actual removal of the
object is delegated to an internal thread that RTI Data Distribution Service spawns to peri-
odically wake up and purge the database of deleted objects.
This thread is known as the Database thread (also referred to as the database cleanup
thread).
❏ Only one Database thread is created for each DomainParticipant.
The DATABASE QosPolicy (DDS Extension) (Section 8.5.1) of the DomainParticipant con-
figures both the resources used by the database as well as the properties of the cleanup
thread. Specifically, the user may want to use this QosPolicy to set the priority, stack size
and thread options of the cleanup thread. You must set these options before the Domain-
Participant is created, because once the cleanup thread is started as a part of participant
creation, these properties cannot be changed.
The period at which the database-cleanup thread wakes up to purge deleted objects is
also set in the DATABASE QosPolicy. Typically, this period is set to a long time (on the
order of a minute) since there is no need to waste CPU cycles to wake up a thread only
to find nothing to do.
However, when a DomainParticipant is destroyed, all of the objects created by the
DomainParticipant will be destroyed as well. Many of these objects are stored in the data-
base, and thus must be destroyed by the cleanup thread. The DomainParticipant cannot
be destroyed until the database is empty and is destroyed itself. Thus, there is a different
parameter in the DATABASE QosPolicy, shutdown_cleanup_period, that is used by the
database cleanup thread when the DomainParticipant is being destroyed. Typically set to

17.2 Event Thread
17-3
17. Threading Model
be on the order of a second, this parameter reduces the additional time needed to
destroy a DomainParticipant simply due to waiting for the cleanup thread to wake up
and purge the database.
17.2 Event Thread
During operation, RTI Data Distribution Service must wake up at different intervals to
check the condition of many different time-triggered or periodic events. These events
are usually to determine if something happened or did not happen within a specified
time. Often the condition must be checked periodically as long as the Entity for which
the condition applies still exists. Also, the DomainParticipant may need to do something
periodically to maintain connections with remote Entities.
For example, the DEADLINE QosPolicy (Section 6.5.4) is used to ensure that DataWrit-
ers have published data or DataReaders have received data within a specified time
period. Similarly, the LIVELINESS QosPolicy (Section 6.5.11) configures RTI Data Distri-
bution Service both to check periodically to see if a DataWriter has sent a liveliness mes-
sage and to send liveliness messages periodically on the behalf of a DataWriter. As a last
example, for reliable connections, heartbeats must be sent periodically from the
DataWriter to the DataReader so that the DataReader can acknowledge the data that it has
received, see Chapter 10: Reliable Communications.
The checking of whether or not deadlines have been missed, the invoking of user-
installed Listener callbacks to notify the application missed deadlines, and the sending
of heartbeats to maintain reliable connections are all done with an internal RTI Data Dis-
tribution Service thread called the Event thread.
❏ Only one Event thread is created per DomainParticipant.
The EVENT QosPolicy (DDS Extension) (Section 8.5.6) of the DomainParticipant config-
ures both the properties and resources of the Event thread. Specifically, the user may
want to use this QosPolicy to set the priority, stack size and thread options of the Event
thread. You must set these options before the DomainParticipant is created, because once
the Event thread is started as a part of participant creation, these properties cannot be
changed.
The EVENT QosPolicy also configures the maximum number of events that can be han-
dled by the Event thread. While the Event thread can only service a single event at a
time, it must maintain a queue to hold events that are pending. The initial_count and
max_count parameters of the QosPolicy set the initial and maximum size of the queue.

Chapter 17
17-4
The priority of the Event thread should be carefully set with respect to the priorities of
the other threads in a system. While many events can tolerate some amount of latency
between the time that the event expires and the time that the Event thread services the
event, there may be application-specific events that must be handled as soon as possi-
ble.
For example, if an application uses the liveliness of a remote DataWriter to infer the cor-
rect operation of a remote application, it may be critical for the user code in the
DataReader Listener callback, on_liveliness_changed(), to be called by the Event thread
as soon as it can be determined that the remote application has died. The operating sys-
tem uses the priority of the Event thread to schedule this action.
17.3 Receive Threads
RTI Data Distribution Service uses internal threads, known as Receive threads, to process
the data packets received via underlying network transports. These data packets may
contain meta-traffic exchanged by DomainParticipants for discovery, or user data (and
meta-data to support reliable connections) destined for local DataReaders.
As a result of processing packets received by a transport, a Receive thread may respond
by sending packets on the network. Discovery packets may be sent to other DomainPar-
ticipants in response to ones received. ACK/NACK packets are sent in response to
heartbeats to support a reliable connection.
When a data-sample arrives, the Receive thread is responsible for deserializing and stor-
ing the data in the receive queue of a DataReader as well as invoking the
on_data_available() DataReaderListener callback (see Section 7.3.3).
The number of Receive threads that RTI Data Distribution Service will create for a
DomainParticipant depends on how you have configured the QosPolicies of DomainPar-
ticipants, DataWriters and DataReaders as well as on the implementation of a particular
transport. The behavior of the builtin transports is well specified. However, if a custom
transport is installed for a DomainParticipant, you will have to understand how the cus-
tom transport works to predict how many Receive threads will be created.
The following discussion applies on a per-transport basis. A single Receive thread will
only service a single transport.
RTI Data Distribution Service will try to create receive resources
1
for every port of every
transport on which it is configured to receive messages. The TRANSPORT_UNICAST
QosPolicy (DDS Extension) (Section 6.5.21) for DomainParticipant, DataWriters, and
DataReaders, the TRANSPORT_MULTICAST QosPolicy (DDS Extension) (Section 7.6.5)

17.3 Receive Threads
17-5
17. Threading Model
for DataReaders and the DISCOVERY QosPolicy (DDS Extension) (Section 8.5.2) for
DomainParticipants all configure the number of ports and the number of transports that
RTI Data Distribution Service will try to use for receiving messages.
Generally, transports will require RTI Data Distribution Service to create a new receive
resource for every unique port number. However, this is both dependent on how the
underlying physical transport works and the implementation of the transport plug-in
used by RTI Data Distribution Service. Sometimes RTI Data Distribution Service only needs
to create a single receive resource for any number of ports.
When RTI Data Distribution Service finds that it is configured to receive data on a port for
a transport for which it has not already created a receive resource, it will ask the trans-
port if any of the existing receive resources created for the transport can be shared. If so,
then RTI Data Distribution Service will not have to create a new receive resource. If not,
then RTI Data Distribution Service will.
The TRANSPORT_UNICAST, TRANSPORT_MULTICAST, and DISCOVERY QosPoli-
cies allow you customize ports for receiving user data (on a per-DataReader basis) and
meta-traffic (DataWriters and DomainParticipants); ports can be also set differently for
unicast and multicast.
How do receive resources relate to Receive threads? RTI Data Distribution Service will
create a Receive thread to service every receive resource that is created. If you use a
socket analogy, then for every socket created, RTI Data Distribution Service will use a sep-
arate thread to process the data received on that socket.
So how many thread will RTI Data Distribution Service create by default–using only the
builtin UDPv4 and shared memory transports and without modifying any QosPolicies?
Three Receive threads are created for meta-traffic
1
:
❏ 2 for unicast (one for UDPv4, one for shared memory)
❏ 1 for multicast (for UDPv4)
2
Three Receive threads created for user data:
❏ 2 for unicast (UDPv4, shared memory)
❏ 1 for multicast (UDPv4)
1. If UDPv4 was the only transport that RTI Data Distribution Service supports, then we would have called
these receive resources, sockets.
1. Meta-traffic refers to traffic internal to RTI Data Distribution Service related to dynamic discovery (see
Chapter 12: Discovery).
2. Multicast is not supported by shared memory transports.
Chapter 17
17-6
Therefore, by default, you will have a total of 6 Receive threads per DomainParticipant.
By using only a single transport and disabling multicast, a DomainParticipant can have
as few as 2 Receive threads.
Similar to the Database and Event threads, a Receive thread is configured by the
RECEIVER_POOL QosPolicy (DDS Extension) (Section 8.5.7). However, note that the
thread properties in the RECEIVER_POOL QosPolicy apply to all Receive threads cre-
ated for the DomainParticipant.
17.4 Exclusive Areas, RTI Data Distribution Service Threads and
User Listeners
RTI Data Distribution Service Event and Receive threads may invoke user code through
the Listener callbacks installed on different Entities while executing internal RTI Data
Distribution Service code. In turn, user code inside the callbacks may invoke RTI Data
Distribution Service APIs that reenter the internal code space of RTI Data Distribution Ser-
vice. For thread safety, RTI Data Distribution Service allocates and uses mutual exclusion
semaphores (mutexes).
As discussed in Section 4.5, when multiple threads and multiple mutexes are mixed
together, deadlock may result. To prevent deadlock from occurring, RTI Data Distribu-
tion Service is designed using careful analysis and following rules that force mutexes to
be taken in a certain order when a thread must take multiple mutexes simultaneously.
However, because the Event and Receive threads already hold mutexes when invoking
user callbacks, and because the RTI Data Distribution Service APIs that the user code can
invoke may try to take other mutexes, deadlock may still result. Thus, to prevent user
code to cause internal RTI Data Distribution Service threads to deadlock, we have created
a concept called Exclusive Areas (EA) that follow rules that prevent deadlock. The more
EAs that exist in a system, the more concurrency is allowed through RTI Data Distribu-
tion Service code. However, the more EAs that exist, the more restrictions on the RTI Data
Distribution Service APIs that are allowed to be invoked in Entity Listener callbacks.
The EXCLUSIVE_AREA QosPolicy (DDS Extension) (Section 6.4.3) control how many
EAs will be created by RTI Data Distribution Service. For a more detailed discussion on
EAs and the restrictions on the use of RTI Data Distribution Service APIs within Entity
Listener methods, please see Exclusive Areas (EAs) (Section 4.5).

17.5 Controlling CPU Core Affinity for RTI Threads
17-7
17. Threading Model
17.5 Controlling CPU Core Affinity for RTI Threads
Two fields in the DDS_ThreadSettings_t structure are related to CPU core affinity:
cpu_list and cpu_rotation.
Note: Although DDS_ThreadSettings_t is used in the Event, Database, ReceiverPool,
and AsynchronousPublisher QoS policies, cpu_list and cpu_rotation are only relevant
in the RECEIVER_POOL QosPolicy (DDS Extension) (Section 8.5.7).
While most thread-related QoS settings apply to a single thread, the ReceiverPool QoS
policy’s thread-settings control every receive thread created. In this case, there are sev-
eral schemes to map M threads to N processors; cpu_rotation controls which scheme is
used.
The cpu_rotation determines how cpu_list affects processor affinity for thread-related
QoS policies that apply to multiple threads. If cpu_list is empty, cpu_rotation is irrele-
vant since no affinity adjustment will occur. Suppose instead that cpu_list ={0,1} and
that the middleware creates three receive threads: {A, B, C}. If cpu_rotation is set to
CPU_NO_ROTATION, threads A, B and C will have the same processor affinities (0-1),
and the OS will control thread scheduling within this bound.
CPU affinities are commonly denoted with a bitmask, where set bits represent allowed
processors to run on. This mask is printed in hex, so a CPU affinity of 0-1 can be repre-
sented by the mask 0x3.
If cpu_rotation is CPU_RR_ROTATION, each thread will be assigned in round-robin
fashion to one of the processors in cpu_list; perhaps thread A to 0, B to 1, and C to 0.
Note that the order in which internal middleware threads spawn is unspecified.
The Platform Notes describe which architectures support this feature.

Chapter 17
17-8

18-1
18. Troubleshooting
Chapter 18 Troubleshooting
This chapter contains tips on troubleshooting RTI Data Distribution Service applications.
For an up-to-date list of frequently asked questions, see the RTI Customer Portal, acces-
sible from www.rti.com/support—select the Find Solution link to see sample code,
general information on RTI Data Distribution Service, performance information, trouble-
shooting tips, and technical details.
This chapter contains the following sections:
❏ What Version am I Running? (Section 18.1)
❏ Controlling Messages from RTI Data Distribution Service (Section 18.2)
18.1 What Version am I Running?
There are two ways to obtain version information:
❏ By looking at the revision files, as described in Section 18.1.1.
❏ Programmatically at run time, as described in Section 18.1.2.
18.1.1 Finding Version Information in Revision Files
In the top-level directory of your RTI Data Distribution Service installation
(${NDDSHOME}), you will find text files that include revision information. The files
are named rev_<product>_rtidds.<version>. For example, you might see files called
rev_host_rtidds.4.5c and rev_persistence_rtidds4.5c. Each file contains more details,
such as a patch level and if the product is license managed.

Chapter 18
18-2
For example:
Host Build 4.5c rev 04 (0x04050200)
The revision files for RTI Data Distribution Service target libraries are in the same direc-
tory as the libraries (${NDDSHOME}/lib/<architecture>).
18.1.2 Finding Version Information Programmatically
The methods in the NDDSConfigVersion class can be used to retrieve version informa-
tion for the RTI Data Distribution Service product, the core library, and the C, C++ or Java
libraries.
The version information includes four fields:
❏ A major version number
❏ A minor version number
❏ A letter release
❏ A build number
Table 18.4 lists the available operations (they will vary somewhat depending on the pro-
gramming language you are using; consult the online documentation for more informa-
tion).
Table 18.1 NDDSConfigVersion Operations
Purpose Operation Description
To retrieve version
information in a
structured format
get_product_version
Gets version information for the RTI Data Distri-
bution Service product.
get_core_version
Gets version information for the RTI Data Distri-
bution Service core library.
get_c_api_version
Gets version information for the RTI Data Distri-
bution Service C library.
get_cpp_api_version
Gets version information for the RTI Data Distri-
bution Service C++ library.
To retrieve version
information in string
format
to_string
Converts the version information for each library
into a string. The strings for each library are put
in a single hyphen-delimited list.
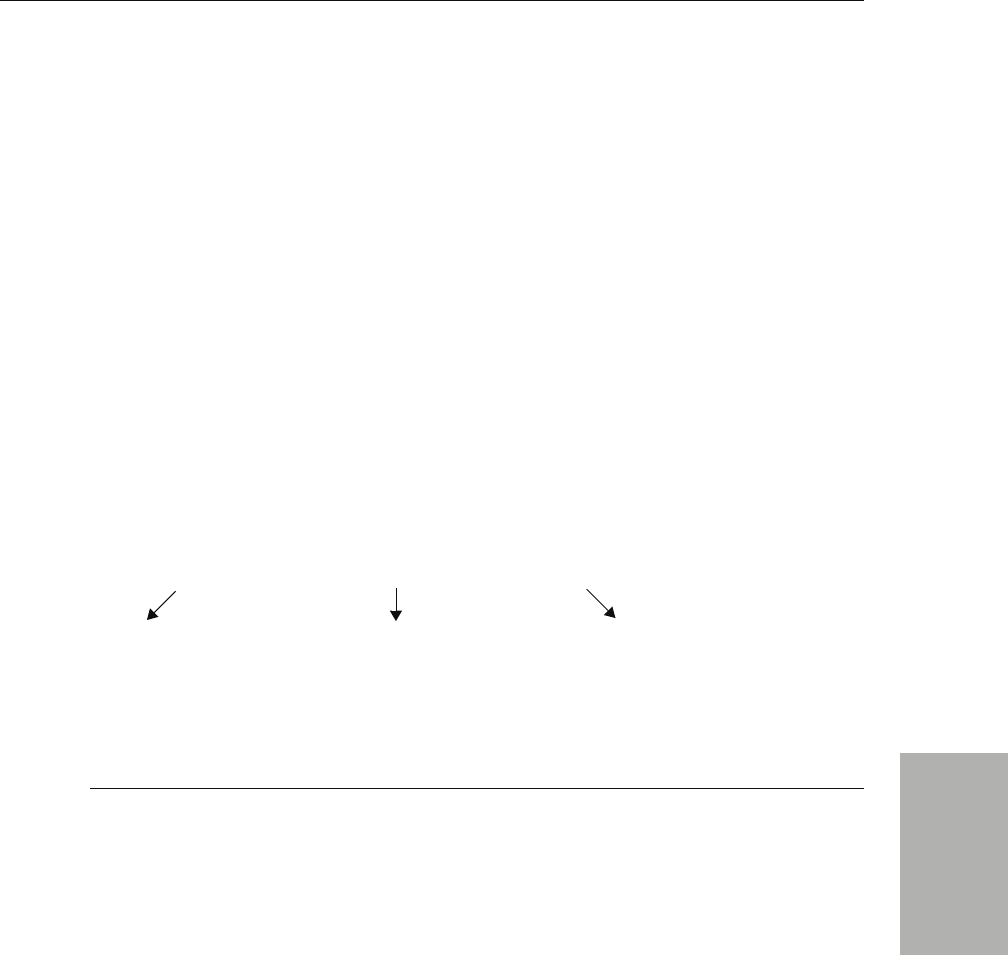
18.2 Controlling Messages from RTI Data Distribution Service
18-3
18. Troubleshooting
The get_product_version() operation returns a reference to a structure of type
DDS_ProductVersion_t:
struct NDDS_Config_ProductVersion_t {
DDS_Char major;
DDS_Char minor;
DDS_Char release;
DDS_Char revision;
};
The other get_*_version() operations return a reference to a structure of type
NDDS_Config_LibraryVersion_t:
struct NDDS_Config_LibraryVersion_t {
DDS_Long major;
DDS_Long minor;
char release;
DDS_Long build;
};
The to_string() operation returns version information for the RTI Data Distribution Ser-
vice core, followed by the C and C++ API libraries, separated by hyphens. For example:
18.2 Controlling Messages from RTI Data Distribution Service
RTI Data Distribution Service provides several types of messages to help you debug your
system and alert you to errors during run time. You can control how much information
is reported and where it is logged.
How much information is logged is known as the verbosity setting. Table 18.2 describes
the six increasing verbosity levels.
nddscore1.0g.rev0-nddsc1.0g.rev1-nddscpp1.0g.rev0
Core
major: 1
minor: 0
release: g
build: 0
C API:
major: 1
minor: 0
release: g
build: 1
C++ API:
major: 1
minor: 0
release:g
build: 0
Chapter 18
18-4
Note that the verbosities are cumulative: logging at a high verbosity means also logging
all lower verbosity messages. If you change nothing, the default verbosity will be set to
NDDS_CONFIG_LOG_VERBOSITY_ERROR.
Caution: Logging at high verbosities can be detrimental to your application's perfor-
mance. You should generally not set the verbosity above
NDDS_CONFIG_LOG_VERBOSITY_WARNING, unless you are debugging a spe-
cific problem.
You will typically change the verbosity of all of
RTI Data Distribution Service at once. How-
ever, in the event that such a strategy produces too much output, you can further dis-
criminate among the messages you would like to see. The types of messages logged by
RTI Data Distribution Service fall into the five categories listed in Table 18.3; each category
can be set to a different verbosity level.
Table 18.2 Message Logging Verbosity Levels
Ver bo si ty
(NDDS_CONFIG_
LOG_VERBOSITY_*) Description
SILENT No messages will be logged. (lowest verbosity)
ERROR (default level
for all categories)
Log only high-priority error messages. An error indicates something
is wrong with how RTI Data Distribution Service is functioning. The
most common cause of this type of error is an incorrect configuration.
WARNING
Additionally log warning messages. A warning indicates that RTI
Data Distribution Service is taking an action that may or may not be
what you intended. Some configuration information is also logged at
this verbosity to aid in debugging.
STATUS_LOCAL
Additionally log verbose information about the lifecycles of local RTI
Data Distribution Service objects.
STATUS_REMOTE
Additionally log verbose information about the lifecycles of remote
RTI Data Distribution Service objects.
STATUS_ALL
Additionally log verbose information about periodic activities and
RTI Data Distribution Service threads. (highest verbosity)

18.2 Controlling Messages from RTI Data Distribution Service
18-5
18. Troubleshooting
The methods in the NDDSConfigLogger class can be used to change verbosity settings,
as well as the destination for logged messages. Table 18.4 lists the available operations;
consult the online documentation for more information.
Table 18.3 Message Logging Categories
Category
(NDDS_CONFIG_
LOG_CATEGORY_*) Description
PLATFORM Messages about the underlying platform (hardware and OS).
COMMUNICATION
Messages about data serialization and deserialization and network
traffic.
DATABASE
Messages about the internal database of RTI Data Distribution Service
objects.
ENTITIES Messages about local and remote entities and the discovery process.
API
Messages about RTI Data Distribution Service’s API layer (such as
method argument validation).
Table 18.4 NDDSConfigLogger Operations
Purpose Operation Description
Change Verbosity
for all Categories
get_verbosity
Gets the current verbosity.
If per-category verbosities are used, returns
the highest verbosity of any category.
set_verbosity Sets the verbosity of all categories.
Change Verbosity
for a Specific
Category
get_verbosity_by_category
Gets/Sets the verbosity for a specific cate-
gory.
set_verbosity_by_category
Change
Destination of
Logged Messages
get_output_file
Returns the file to which messages are being
logged, or NULL for the default destination
(standard output on most platforms).
set_output_file
Redirects future logged messages to the spec-
ified file (or NULL to return to the default).
Change Message
Format
get_print_format Gets/Sets the current message format that
RTI Data Distribution Service is using to log
diagnostic information. See Format of
Logged Messages (Section 18.2.1).
set_print_format

Chapter 18
18-6
18.2.1 Format of Logged Messages
You can control the amount of information in each message with the set_print_format()
operation. The format options are listed in Step 18.5.
Of course, you are not likely to recognize all of the method names; many of the opera-
tions that perform logging are deep within the implementation of
RTI Data Distribution
Service
. However, in case of errors, logging will typically take place at several points
within the call stack; the output thus implies the stack trace at the time the error
occurred. You may only recognize the name of the operation that was the last to log its
message (i.e., the function that called all the others); however, the entire stack trace is
extremely useful to RTI support personnel in the event that you require assistance.
You may notice that many of the logged messages begin with an exclamation point
character. This convention indicates an error and is intended to be reminiscent of the
negation operator in many programming languages. For example, the message “!create
socket”in the second line of the above stack trace means “cannot create socket.”
18.2.1.1 Timestamps
Reported times are in seconds from a system-dependent starting time; these are equiva-
lent to the output format from
RTI Data Distribution Service. The timestamp is in the form
"ssssss.mmmmmm" where <ssssss> is a number of seconds, and <mmmmm> is a frac-
tion of a second expressed in microseconds. Enabling timestamps will result in some
additional overhead for clock access for every message that is logged.
Logging of timestamps is not enabled by default. To enable it, use
NDDS_Config_Logger method set_print_format().
Table 18.5 Message Formats
Message Format
(NDDS_CONFIG_LOG_
PRINT_FORMAT_*) Description
DEFAULT Message, method name, and activity context.
TIMESTAMPED Message, method name, activity context, and timestamp.
VERBOSE
Message with all available context information (includes thread
identifier, activity context).
VERBOSE_TIMESTAMPED Message with all available context information and timestamp.
DEBUG Information for internal debugging by RTI personnel.
MINIMAL Message number, method name.
MAXIMAL All available fields.

18.2 Controlling Messages from RTI Data Distribution Service
18-7
18. Troubleshooting
18.2.1.2 Thread identification
Thread identification strings uniquely identify for active thread when a message is out-
put to the console. A thread may be a user (application) thread or one of several types
of internal threads. The possible thread types are:
❏ user thread: U<threadID>
❏ receive thread: rR<thread index><domain ID><app ID>, where thread index is
an integer identifying this receive thread
❏ event thread: revt<domain ID><app ID>
❏ asynchronous publisher thread: rDsp
Logging of thread IDs are not enabled by default. To enable it, use
NDDS_Config_Logger method set_print_format().
18.2.1.3 Hierarchical Context
Many middleware APIs now store information in thread-specific storage about the cur-
rent operation, as well as information about which domain (and participant ID) was
active, and which entities were being operated on. In the case of objects that are associ-
ated with topics, the topic name is also stored.
The context field is output by default.
18.2.1.4 Explanation of Context Strings
❏ Domain context
Dxxyy
In this case, xx = participant ID, yy = domain #. For example, D0149 means
“domain 49, participant 01.”
❏ Entity context
Operation on an entity will specify the object and a numeric ID, such as
Writer(001A1). The name will be one of the following:
String Object type
Participant DDS_DomainParticipant
Pub DDS_Publisher
Sub DDS_Subscriber
Topic DDS_Topic

Chapter 18
18-8
❏ Topic Context
T=Hello refers to topic "Hello."
The operations which report context include:
Writer DDS_<*>DataWriter
Reader DDS_<*>DataReader
String Operation
Entity operations
ENABLE Entity::enable
GET_QOS Entity::get_qos
SET_QOS Entity::set_qos
GET_LISTENER Entity::get_listener
SET_LISTENER Entity::set_listener
Factory operations (DP Factory, Participant, Pub/Sub)
CREATE <Entity> Factory::create_<entity>
DELETE <Entity> Factory::delete_<entity>
GET_DEFAULT_QOS <Entity> Factory::get_default_<entity>_qos
SET_DEFAULT_QOS <Entity> Factory::set_default_<entity>_qos
Participant-specific operations
GET_PUBS Participant::get_publishers
GET_SUBS Participant::get_subscribers
LOOKUP Topic(<name>) Participant::lookup_topicdescription
LOOKUP FlowController(<name>) Participant::lookup_flowcontroller
IGNORE <Entity>(<host ID>) Participant::ignore_<entity>

Part 4: RTI Secure WAN Transport
The material in this part of the manual is only relevant if you have installed RTI Secure
WAN Transport.
This feature is not part of the standard RTI Data Distribution Service package; it must be
downloaded and installed separately. It is only available on specific architectures. See
the RTI Secure WAN Transport Release Notes and RTI Secure WAN Transport Installation
Guide for details.
RTI Secure WAN Transport is an optional package that enables participant discovery and
data exchange in a secure manner over the public WAN. RTI Secure WAN Transport
enables RTI Data Distribution Service to address the challenges in NAT traversal and
authentication of all participants. By implementing UDP hole punching using the STUN
protocol and providing security to channels by leveraging DTLS (Datagram TLS), you
can securely exchange information between different sites separated by firewalls.
❏ Chapter 19: RTI Secure WAN Transport
❏ Chapter 20: Configuring RTI Secure WAN Transport

Part 4. RTI Secure WAN Transport

19-1
19. RTI Secure WAN
Transport
Chapter 19 RTI Secure WAN Transport
RTI Secure WAN Transport provides transport plugins that can be used by developers of
RTI Data Distribution Service applications. These transport plugins allow RTI Data Distri-
bution Service applications running on private networks to communicate securely over a
Wide-Area Network (WAN), such the internet. There are two primary components in
the package which may be used independently or together: communication over Wide-
Area Networks that involve Network Address Translators (NATs), and secure commu-
nication with support for peer authentication and encrypted data transport.
The RTI Data Distribution Service core is transport-agnostic. RTI Data Distribution Service
offers three built-in transports: UDP/IPv4, UDP/IPv6, and inter-process shared mem-
ory. The implementation of NAT traversal and secure communication is done at the
transport level so that the DDS core is not affected and does not need to be changed,
although there is additional on-the-wire traffic.
The basic problem to overcome in a WAN environment is that messages sent from an
application on a private local-area network (LAN) appear to come from the LAN's
router address, not from the internal IP address of the host running the application. This
is due to the existence of a Network Address Translator (NAT) at the gateway. This does
not cause problems for client/server systems because only the server needs to be glob-
ally addressable; it is only a problem for systems with peer-to-peer communication
models, such as DDS. RTI Secure WAN Transport solves this problem, allowing commu-
nication between peers that are in separate LAN networks, using a UDP hole-punching
mechanism based on the STUN protocol (IETF RFC 3489bis) for NAT traversal. This
requires the use of an additional rendezvous server application, the RTI WAN Server.
Once the transport has enabled traffic to cross the NAT gateway to the WAN, it is flow-
ing on network hardware that is shared (in some cases, over the public internet). In this

Chapter 19
19-2
context, it is important to consider the security of data transmission. There are three pri-
mary issues involved:
❏ authenticating the communication peer (source or destination) as a trusted part-
ner;
❏ encrypting the data to hide it from other parties that may have access to the net-
work;
❏ validating the received data to ensure that it was not modified in transmission.
RTI Secure WAN Transport addresses these problems by wrapping all RTPS-encoded data
using the DTLS protocol (IETF RFC 4347), which is a variant of SSL/TLS that can be
used over a datagram network-layer transport such as UDP. The security features of the
WAN Transport may also be used on an untrusted local-area network with the Secure
Transport.
In summary, the package includes two transports:
❏ The WAN Transport is for use on a WAN and includes security. It must be used
with the WAN Server, a rendezvous server that provides the ability to discover
public addresses and to register and look up peer addresses based on a unique
WAN ID. The WAN Server is based on the STUN (Session Traversal Utilities for
NAT) protocol [draft-ietfbehave-rfc3489bis], with some extensions. Once infor-
mation about public addresses for the application and its peers has been
obtained and connections have been initiated, the server is no longer required to
maintain communication with a peer. (Note: security is disabled by default.)
❏ The Secure Transport is an alternate transport that provides security on an
untrusted LAN. Use of the RTI WAN Server is not required.
Multicast communication is not supported by either of these transports.
This chapter provides a technical overview of:
❏ WAN Traversal via UDP Hole-punching (Section 19.1)
❏ WAN Locators (Section 19.2)
❏ Datagram Transport-Layer Security (DTLS) (Section 19.3)
❏ Certificate Support (Section 19.4)
For information on how to use RTI Secure WAN Transport with your RTI Data Distribution
Service application, see Chapter 20: Configuring RTI Secure WAN Transport.

19.1 WAN Traversal via UDP Hole-punching
19-3
19. RTI Secure WAN
Transport
19.1 WAN Traversal via UDP Hole-punching
In order to resolve the problem of communication across NAT boundaries, the WAN
Transport implements a UDP hole-punching solution for NAT traversal [draft-ietf-
behave-p2p-state]. This solution uses a rendezvous server, which provides the ability to
discover public addresses, and to register and lookup peer addresses based on a unique
WAN ID. This server is based on the STUN (Session Traversal Utilities for NAT) proto-
col [draft-ietf-behave-rfc3489bis], with some extensions. This protocol is a part of the
solution used for standards-based voice over IP applications; similar technology has be
used by systems such as Skype and has proven to be highly reliable. A key advantage of
STUN is that it is based on UDP and therefore is able to preserve the real-time character-
istics of the DDS Interoperability Wire Protocol.
Once information about public addresses for the application and its peers has been
obtained, and connections have been initiated, the server is no longer required to main-
tain communication with a peer. However, if communication fails, possibly due to
changes in dynamically-allocated addresses, the server will be needed to reopen new
public channels.
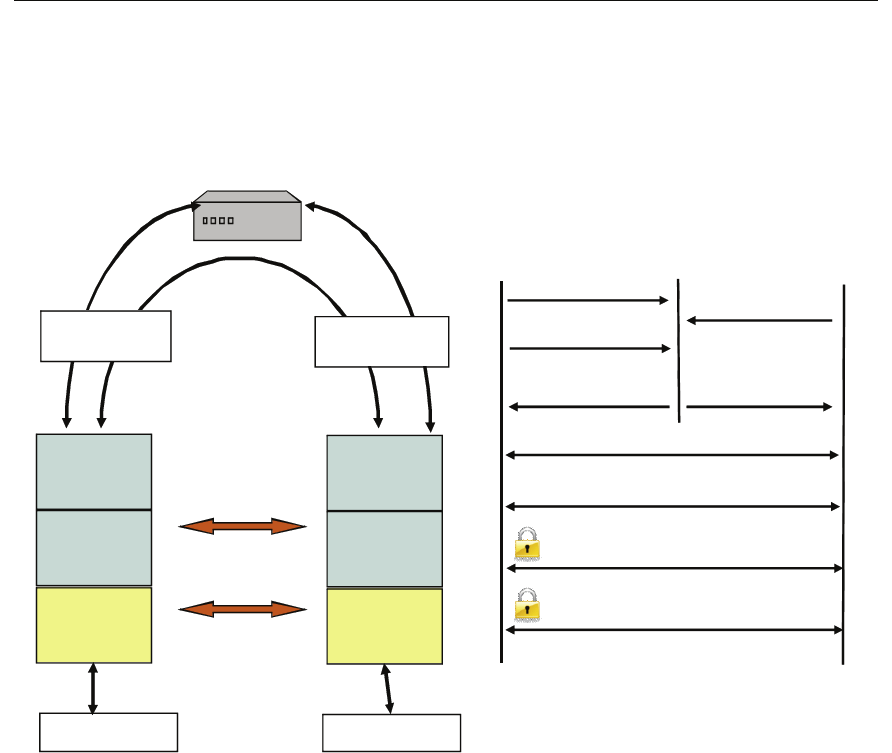
Chapter 19
19-4
Figure 19.1 shows the RTI WAN transport architecture.
19.1.1 Protocol Details
The UDP hole-punching algorithm implemented by the WAN transport has two differ-
ent phases: registration and connection. This algorithm only works with cone or asym-
metric NATs where the same public address/port is assigned to all the sessions with the
same private address/port address.
Figure 19.1 RTI WAN Transport Architecture
DDS
DTLS
RTPS Discovery Traffic
RTPS User Traffic
NAT
STUN
Application 1
DDS
DTLS
STUN
Application 2
DTLS handshaking
Encrypted RTPS
STUN traffic
DTLS traffic
STUN traffic
NAT
RTI WAN Rendezvous Server
Server
Register
Domain Participant 1
Connect to DP 2
Register
DP 2 public address
DP 1 public address
Connect
DTLS handshaking
RTPS discovery
RTPS user traffic
Domain Participant 2

19.1 WAN Traversal via UDP Hole-punching
19-5
19. RTI Secure WAN
Transport
❏ Registration Phase
The RTI WAN Server application runs on a machine that resides on the WAN
network (i.e., not in a private LAN). It has to be globally accessible to LAN appli-
cations. It is started by a script and acts as a rendezvous point for LAN applica-
tions. During the registration phase, each transport locator is registered with the
RTI WAN Server using a STUN binding request message.
The RTI WAN Server associates RTPS locators with their corresponding public
IPv4 transport addresses (a combination of IP address and port) and stores that
information in an internal table. Figure 19.2 illustrates the registration phase.
RTI Data
Distribution
Service
NAT
Transport
Plugin
RTI Data
Distribution
Service
NAT
Transport
Plugin
RTPS
Locator A
other. com#192. 168.15.100:8000
Locator B
rt i.com#192. 168.1.100:700
0
RTI WAN Server
( 18.181.0.31)
NAT
(155.99.25.11)
(1) From locator A to server
BIND REQUEST
Src Locator Attribute:
ot her.com#192. 168.15.100:8000
Liveliness Period:
60000
NAT
(138.76.29. 7)
(1) From locator B to server
BIND REQUEST
Src Locator Attribute:
rt i.com#192.168.1.100:7000
Liveliness Period:
60000
(2) From server to locator A
BIND RESPONSE
Mapped Address Attribute:
155. 99.25.11:8001
(2) From server to locator B
BIND RESPONSE
Mapped Address Attribute:
138. 76.29.7:7001
Figure 19.2 Registration Phase

Chapter 19
19-6
❏ Connection Phase
The connection phase starts when locator A wants to establish a connection with
locator B. Locator A obtains information about locator B via RTI Data Distribution
Service discovery traffic or the initial NDDS_DISCOVERY_PEERS list. To estab-
lish a connection with locator B, locator A sends a STUN connect request to the
RTI WAN server. The server sends a STUN connect response to locator A, includ-
ing information about the public IP transport address (IP address and port) of
locator B. In parallel, the RTI WAN server contacts locator B using another STUN
connect request to let it know that locator A wants to establish a connection with
it.
When locator A receives the public IP address of locator B, it will try to contact B
using two STUN binding request messages. The first message is sent to the pub-
lic address of B and the second message is sent to the private address of B. The
private address was obtained using the last 32 bits of the locator address of B.
The STUN binding request message directed to the public transport address of B
sent by locator A will open a hole in A's NAT to receive messages from B.
When locator B receives the public address of locator A, it will try to contact A
sending a STUN binding request message to that public address. This message
will open a hole in B's NAT to receive messages from A. When locator A receives
the first STUN binding response from locator B, it starts sending RTPS traffic.
The connection phase includes two processes: the connect process (Figure 19.3
on page 19-7) and the NAT hole punching process (Figure 19.4 on page 19-8).
❏ STUN Liveliness
Finally, since bindings allocated by NAT expire unless refreshed, the clients
(locators) must generate binding request messages for the server and other cli-
ents to refresh the bindings. The RTI STUN protocol implementation uses the
attribute LIVELINESS-PERIOD in the STUN binding request to indicate the
period in milliseconds at which a client will assert its liveliness. The WAN Server
will remove a locator from its mapping table when the liveliness contract is not
met. Likewise, a transport instance will remove a STUN connection with a loca-
tor when this locator does not assert its liveliness as indicated in the last binding
request.

19.1 WAN Traversal via UDP Hole-punching
19-7
19. RTI Secure WAN
Transport
RTI Data
Distribution
Service
WAN
Transport
Plugin
RTI Data
Distribution
Service
WAN
Transport
Plugin
RTPS
Locat or A
other .com#192.168. 15 .1 00: 80 00
Locator B
rti .com#192.168.1.10 0: 70 00
RTI WAN Server
(18.181.0.31)
NAT
(155.99.25.11)
(1) From locator A to server
CONNECT REQUEST
Src Locat or At tribute:
other .com#192.168. 15 .1 00: 80 00
Dst Locator Attribute
rti.com#192.168.1.10 0: 70 00
NAT
(138.76.29.7)
(2) From server t o locator A
CONNECT RESPONSE
Mapped Address Attribut e:
138.76.29.7:7 00 1
(3) From server t o locator B
CONNECT REQUEST
Src Locat or At tribut e:
rti .com#192.168.1.10 0: 70 00
Dst Locator Attribute
other .com#192.168. 15 .1 00: 80 00
Mapped Address Attribut e:
155.99.25.11: 80 01
(4) From locat or B t o server
CONNECT RESPONSE
Figure 19.3 Connect Process

Chapter 19
19-8
RTI Data
Distribution
Service
WAN
Transport
Plugin
RTI Data
Distribution
Service
WAN
Transport
Plugin
RTPS
Locator A
other .com#192.168. 15 .1 00: 80 00
Locat or B
rti.com#192.168.1.10 0: 70 00
RTI WAN Server
(18.181.0.31)
NAT
(155.99.25.11)
(1) From locator A to public address
of locator B
BIND REQUEST
Src Locator Attribute:
other.com#192.168.15.100:8000
Liveliness Period:
60000
NAT
(138.76.29.7)
(1) From locator B to public address
of locator A
BIND REQUEST
Src Locator Attribute:
rti.com#192.168.1.100:7000
Liveliness Period:
60000
(2) From locator A to public address of
locator B
BIND RESPONSE
Mapped Address Attribute:
138.76.29.7:7001
(2) From locat or B t o public address of
locator A
BIND RESPONSE
Mapped Address Attribute:
155.99.25.11:8001
(1) From locator A t o private address
of locator B
BIND REQUEST
Src Locator Attribute:
other.com#192.168.15.100:8000
Liveliness Period:
60000
Figure 19.4 NAT Hole Punching Process

19.2 WAN Locators
19-9
19. RTI Secure WAN
Transport
19.2 WAN Locators
The WAN transport does not use simple IP addresses to locate peers. A WAN transport
locator consists of a WAN ID, which is an arbitrary 12-byte value, and a bottom 4-byte
value that specifies a fallback local IPv4 address. Your peers list
(NDDS_DISCOVERY_PEERS) must be configured to look for peers with locators of the
form:
❏ The address is a 128-bit address in IPv6 notation.
❏ The "wan://" part specifies that the address is for the WAN transport.
❏ The next part, "::1", specifies the top 12 bytes of the address to be 11 zero bytes,
followed by a byte with value 1 (this corresponds to the peer's WAN ID).
❏ The last part, "10.10.1.150" refers to the peers local IPv4 address, which will be
used if the peers are on the same local network.
A DomainParticipant using the WAN transport will have to initialize the
DDS_DiscoveryQosPolicy::initial_peers QoS with the WAN locator addresses corre-
sponding to the peers to which it wants to connect to. The value of
DDS_DiscoveryQosPolicy::initial_peers can be set using the environment variable
NDDS_DISCOVERY_PEERS or the NDDS_DISCOVERY_PEERS configuration file. (See
Configuring the Peers List Used in Discovery (Section 12.2).)

Chapter 19
19-10
19.3 Datagram Transport-Layer Security (DTLS)
Data security is provided by wrapping all DDS network traffic with the Datagram
Transport Layer Security (DTLS) protocol (IETF RFC 4347). DTLS is a relatively recent
variant of the mature SSL/TLS family of protocols which adds the capability to secure
communication over a connectionless network-layer transport such as UDP. UDP is the
preferred network layer transport for the DDS wire protocol RTPS, as well as for NAT
traversal. Like SSL/TLS, the DTLS protocol provides capabilities for certificate-based
authentication, data encryption, and message integrity. The protocol specifies a number
of standard cryptographic algorithms that must be available; the base set is listed in the
TLS 1.1 specification (IETF RFC 4346).
Secure protocol support is provided by the open source OpenSSL library, which has
supported the DTLS protocol since the release of OpenSSL 0.9.8. Note however that
many critical issues in DTLS were resolved by the OpenSSL 0.9.8f release. For more
detailed information about available ciphers, certificate support, etc. please refer to the
OpenSSL documentation. The DTLS protocol securely authenticates with each individ-
ual peer; as such, multicast communication is not supported by the Secure Transport.
There is also a FIPS security-certified version of OpenSSL (OpenSSL-FIPS 1.1.1), but this
does not yet support DTLS.
The Secure Transport protocol stack is similar to the Secure WAN transport stack, but
without the STUN layer and server. See Figure 19.1 on page 19-4.
19.3.1 Security Model
In order to communicate securely, an instance of the secure plugin requires: 1) a certifi-
cate authority (shared with all peers), 2) an identifying certificate which has been signed
by the authority, 3) the private key associated with the public key contained in the certif-
icate.
The Certificate Authority (CA) is specified by using a PEM format file containing its
public key or by using a directory of PEM files following standard OpenSSL naming
conventions. If a single CA file is used, it may contain multiple CA keys. In order to suc-
cessfully communicate with a peer, the CA keys that are supplied must include the CA
that has signed that peer's identifying certificate.
The identifying certificate is specified by using a PEM format file containing the chain of
CAs used to authenticate the certificate. The identifying certificate must be signed by a
CA. It will either be directly signed by a root CA (one of the CAs supplied above), by an
authority whose certificate has been signed by the root CA, or by a longer chain of cer-
tificate authorities. The file must be sorted starting with the certificate to the highest

19.4 Certificate Support
19-11
19. RTI Secure WAN
Transport
level (root CA). If the certificate is directly signed by a root CA, then this file will only
contain the root CA certificate followed by the identity certificate.
Finally, a private key is required. In order to avoid impersonation of an identity, this
should be kept private. It can be stored in its own PEM file specified in one of the pri-
vate key properties, or it can be appended to the certificate chain file.
One complication in the use of DTLS for communication by DDS is that even though
DTLS is a connectionless protocol, it still has client/server semantics. The RTI Secure
Transport maps a bidirectional communication channel between two peer applications
into a pair of unidirectional encrypted channels. Both peers are playing the part of a cli-
ent (when sending data) and a server (when receiving).
19.3.2 Liveliness Mechanism
When a peer shuts down cleanly, the DTLS protocol ensures that resources are released.
If a peer crashes or otherwise stops responding, a liveliness mechanism in the DTLS
transport cleans up resources. You can configure the DTLS handshake retransmission
interval and the connection liveliness interval.
19.4 Certificate Support
Cryptographic certificates are required to use the security features of the WAN trans-
port. This section describes a mechanism to use the OpenSSL command line tool to gen-
erate a simple private certificate authority. For more information, see the manual page
for the openssl tool (http://www.openssl.org/docs/apps/openssl.html) or the book,
"Network Security with OpenSSL" by Viega, Messier, & Chandra (O'Reilly 2002; http://
www.opensslbook.com), or other references on Public Key Infrastructure.
1. Initialize the Certificate Authority:
a. Create a copy of the openssl.cnf file and edit fields to specify the proper
default names and paths.
b. Create the required CA directory structure:
mkdir myCA
mkdir myCA/certs
mkdir myCA/private
mkdir myCA/newcerts
mkdir myCA/crl
touch myCA/index.txt

Chapter 19
19-12
c. Create a self-signed certificate and CA private key:
openssl req -nodes -x509 -days 1095 -newkey rsa:2048 \
-keyout myCA/private/cakey.pem -out myCA/cacert.pem \
-config openssl.cnf
2. For each identifying certificate:
a. You may want to create a copy of your customized openssl.cnf file with
default identifying information to be used as a template for certificate request
creation; the commands below refer to this file as "template.cnf."
b. Generate a certificate request and private key:
openssl req -nodes -new -newkey rsa:2048 -config template.cnf \
-keyout peer1key.pem -out peer1req.pem
c. Use the CA to sign the certificate request to generate certificate:
openssl ca -create serial -config openssl.cnf -days 365 \
-in peer1req.pem -out myCA/newcerts/peer1cert.pem
d. Optionally, append the private key to the peer certificate:
cat myCA/newcerts/peer1cert.pem peer1key.pem \
$>${private location}/ peer1.pem
19.5 License Issues
The OpenSSL toolkit stays under a dual license, i.e., both the conditions of the OpenSSL
License and the original SSLeay license apply to the toolkit. See below for the actual
license texts. Actually both licenses are BSD-style Open Source licenses. In case of any
license issues related to OpenSSL please contact [email protected].
/* ====================================================================
* Copyright (c) 1998-2007 The OpenSSL Project. All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* 1. Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* 2. Redistributions in binary form must reproduce the above copyright

19.5 License Issues
19-13
19. RTI Secure WAN
Transport
* notice, this list of conditions and the following disclaimer in
* the documentation and/or other materials provided with the
* distribution.
*
* 3. All advertising materials mentioning features or use of this
* software must display the following acknowledgment:
* "This product includes software developed by the OpenSSL Project
* for use in the OpenSSL Toolkit. (http://www.openssl.org/)"
*
* 4. The names "OpenSSL Toolkit" and "OpenSSL Project" must not be used to
* endorse or promote products derived from this software without
* prior written permission. For written permission, please contact
*
* 5. Products derived from this software may not be called "OpenSSL"
* nor may "OpenSSL" appear in their names without prior written
* permission of the OpenSSL Project.
*
* 6. Redistributions of any form whatsoever must retain the following
* acknowledgment:
* "This product includes software developed by the OpenSSL Project
* for use in the OpenSSL Toolkit (http://www.openssl.org/)"
*
* THIS SOFTWARE IS PROVIDED BY THE OpenSSL PROJECT ``AS IS'' AND ANY
* EXPRESSED OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
* IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE OpenSSL PROJECT OR
* ITS CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
* SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT
* NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
* LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION)
* HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT,
* STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
* ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED
* OF THE POSSIBILITY OF SUCH DAMAGE.
* ====================================================================
*
* This product includes cryptographic software written by Eric Young
* ([email protected]). This product includes software written by Tim
* Hudson ([email protected]).
*
*/
Original SSLeay License
-----------------------
/* Copyright (C) 1995-1998 Eric Young ([email protected])
* All rights reserved.
*

Chapter 19
19-14
* This package is an SSL implementation written
* by Eric Young ([email protected]).
* The implementation was written so as to conform with Netscapes SSL.
*
* This library is free for commercial and non-commercial use as long as
* the following conditions are aheared to. The following conditions
* apply to all code found in this distribution, be it the RC4, RSA,
* lhash, DES, etc., code; not just the SSL code. The SSL documentation
* included with this distribution is covered by the same copyright terms
* except that the holder is Tim Hudson ([email protected]).
*
* Copyright remains Eric Young's, and as such any Copyright notices in
* the code are not to be removed.
* If this package is used in a product, Eric Young should be given
* attribution
* as the author of the parts of the library used.
* This can be in the form of a textual message at program startup or
* in documentation (online or textual) provided with the package.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
* 1. Redistributions of source code must retain the copyright
* notice, this list of conditions and the following disclaimer.
* 2. Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
* 3. All advertising materials mentioning features or use of this software
* must display the following acknowledgement:
* "This product includes cryptographic software written by
* Eric Young ([email protected])"
* The word 'cryptographic' can be left out if the routines from the
* library
* being used are not cryptographic related :-).
* 4. If you include any Windows specific code (or a derivative thereof)
* from
* the apps directory (application code) you must include an
* acknowledgement:
* "This product includes software written by Tim Hudson
* ([email protected])"
*
* THIS SOFTWARE IS PROVIDED BY ERIC YOUNG ``AS IS'' AND
* ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
* IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE
* ARE DISCLAIMED. IN NO EVENT SHALL THE AUTHOR OR CONTRIBUTORS BE LIABLE
* FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
* CONSEQUENTIAL
* DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS

19.5 License Issues
19-15
19. RTI Secure WAN
Transport
* OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION)
* HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT,
* STRICT
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY
* OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF
* SUCH DAMAGE.
*
* The licence and distribution terms for any publicly available
* version or
* derivative of this code cannot be changed. i.e. this code cannot
* simply be
* copied and put under another distribution licence
* [including the GNU Public Licence.]
*/

Chapter 19
19-16

20-1
20. Configuring WAN
Transports
Chapter 20 Configuring RTI Secure WAN Transport
The RTI Secure WAN Transport package includes two transports:
❏ The WAN Transport is for use on a WAN and includes security.
1
It must be used
with the WAN Server, a separate application that provides additional services
needed for RTI Data Distribution Service applications to communicate with each
other over a WAN.
❏ The Secure Transport is an alternate transport that provides security on an
untrusted LAN. Use of the RTI WAN Server is not required.
There are two ways in which these transports can be configured:
❏ By setting up predefined strings in the Property QoS Policy of the DomainPartici-
pant (on UNIX, Solaris and Windows systems only). This process is described in
Setting Up a Transport with the Property QoS (Section 20.2).
❏ By instantiating a new transport (Section 20.5) and then registering it with the
DomainParticipant, see Section 13.7 (not available in Java API).
Refer to the online documentation for details on these two approaches.
20.1 Example Applications
A simple example is available to show how to configure the WAN transport. It includes
example settings to enable communication over WAN, and optional settings to enable
security (along with example certificate files to use for secure communication). The
1. Security is disabled by default.

Chapter 20
20-2
example is located in <RTI_Data_Distribution_Service_INSTALL_ROOT>/example/
<language>/HelloWorldWAN.
As seen in the example, you can configure the properties of either transport by setting
the appropriate name/value pairs in the DomainParticipant’s PropertyQoS, as described
in Section 20.2. This will cause RTI Data Distribution Service to dynamically load the
WAN or Secure Transport libraries at run time and then implicitly create and register
the transport plugin.
Another way to use the WAN or Secure transports is to explicitly create the plugin and
use register_transport() to register the transport with RTI Data Distribution Service (see
Section 13.7). This way is not shown in the example. See Explicitly Instantiating a WAN
or Secure Transport Plugin (Section 20.5).
20.2 Setting Up a Transport with the Property QoS
The PROPERTY QosPolicy (DDS Extension) (Section 6.5.15) allows you to set up name/
value pairs of data and attach them to an entity, such as a DomainParticipant. This will
cause RTI Data Distribution Service to dynamically load the WAN or Secure Transport
libraries at run time and then implicitly create and register the transport plugin.
Please refer to Setting Builtin Transport Properties with the PropertyQosPolicy (Section
13.6).
To assign properties, use the add_property() operation:
DDS_ReturnCode_t DDSPropertyQosPolicyHelper::add_property
(DDS_PropertyQosPolicy policy,
const char * name,
const char * value,
DDS_Boolean propagate)
For more information on add_property() and the other operations in the DDSProperty-
QosPolicyHelper class, please see Table 6.48, “PropertyQoSPolicyHelper Operations,”
on page 6-139, as well as the online (HTML) documentation.
The ‘name’ part of the name/value pairs is a predefined string, described in WAN
Transport Properties (Section 20.3) and Secure Transport Properties (Section 20.4).

20.2 Setting Up a Transport with the Property QoS
20-3
20. Configuring WAN
Transports
Here are the basic steps, taken from the example Hello World application (for details,
please see the example application.)
1. Get the default DomainParticipant QoS from the DomainParticipantFactory.
DDSDomainParticipantFactory::get_instance()->get_default_participant_qos(
participant_qos);
2. Disable the builtin transports.
participant_qos.transport_builtin.mask = DDS_TRANSPORTBUILTIN_MASK_NONE;
3. Set up the DomainParticipant’s Property QoS.
a. Load the plugin.
DDSPropertyQosPolicyHelper::add_property (participant_qos.property,
"dds.transport.load_plugins", "dds.transport.wan_plugin.wan",
DDS_BOOLEAN_FALSE);
b. Specify the transport plugin library.
DDSPropertyQosPolicyHelper::add_property (participant_qos.property,
"dds.transport.wan_plugin.wan.library", "libnddstransportwan.so",
DDS_BOOLEAN_FALSE);
c. Specify the transport’s ‘create’ function.
DDSPropertyQosPolicyHelper::add_property (participant_qos.property,
"dds.transport.wan_plugin.wan.create_function",
"NDDS_Transport_WAN_create",
DDS_BOOLEAN_FALSE);
d. Specify the WAN Server and instance ID.
DDSPropertyQosPolicyHelper::add_property (participant_qos.property,
"dds.transport.wan_plugin.wan.server", "192.168.1.1",
DDS_BOOLEAN_FALSE);
DDSPropertyQosPolicyHelper::add_property (participant_qos.property,
"dds.transport.wan_plugin.wan.transport_instance_id", 1,
DDS_BOOLEAN_FALSE);
e. Specify any other properties, as needed.
4. Create the DomainParticipant, using the modified QoS.
participant = DDSTheParticipantFactory->create_participant (domainId,
participant_qos, NULL /* listener */, DDS_STATUS_MASK_NONE);
Chapter 20
20-4
Important!
Property changes should be made before the transport is loaded: either
before the DomainParticipant is enabled, before the first DataWriter/DataReader is created,
or before the builtin topic reader is looked up, whichever one happens first.
20.3 WAN Transport Properties
Table 20.1 lists the properties that you can set for the WAN Transport.
Table 20.1 Properties for NDDS_Transport_WAN_Property_t
Property Name
(prefix with
‘dds.transport.WAN.wan1.’)
a
Property Value Description
dds.transport.load_plugins
(note: this does not take a prefix)
Required Comma-separated strings indicating the prefix names of all
plugins that will be loaded by RTI Data Distribution Service. For exam-
ple: “dds.transport.WAN.wan1". You will use this string as the prefix
to the property names. See
a
. Note: you can load up to 8 plugins.
library
Required Must set to "libnddstransportwan.so" (for UNIX/Solaris
systems) or "nddstransportwan.dll" (for Windows system).
This library and the dependent OpenSSL libraries need to be in the
path during run time for use by RTI Data Distribution Service (in the
LD_LIBRARY_PATH environment variable on UNIX/Solaris systems,
in Path for Windows systems).
create_function Required Must be "NDDS_Transport_WAN_create"
aliases
Used to register the transport plugin returned by
NDDS_Transport_WAN_create() (as specified by
<WAN_prefix>.create_function) to the DomainParticipant. Aliases
should be specified as a comma-separated string, with each comma
delimiting an alias. If it is not specified, the prefix
a
is used as the
default alias for the plugin.

20.3 WAN Transport Properties
20-5
20. Configuring WAN
Transports
verbosity
Specifies the verbosity of log messages from the transport.
Possible values:
-1: silent
0 (default): errors only
1: errors and warnings
2: local status
5 or higher: all messages
parent.parent.address_bit_count
Number of bits in a 16-byte address that are used by the transport.
Should be between 0 and 128. For example, for an address range of 0-
255, the address_bit_count should be set to 8.
parent.parent.properties_bitmap
A bitmap that defines various properties of the transport to the RTI
Data Distribution Service core. Currently, the only property supported is
whether or not the transport plugin will always loan a buffer when RTI
Data Distribution Service tries to receive a message using the plugin.
This is in support of a zero-copy interface.
parent.parent.gather_send_
buffer_count_max
Specifies the maximum number of buffers that RTI Data Distribution
Service can pass to the send() function of the transport plugin.
The transport plugin send() API supports a gather-send concept,
where the send() call can take several discontiguous buffers, assemble
and send them in a single message. This enables RTI Data Distribution
Service to send a message from parts obtained from different sources
without first having to copy the parts into a single contiguous buffer.
However, most transports that support a gather-send concept have an
upper limit on the number of buffers that can be gathered and sent.
Setting this value will prevent RTI Data Distribution Service from trying
to gather too many buffers into a send call for the transport plugin.
RTI Data Distribution Service requires all transport-plugin implementa-
tions to support a gather-send of least a minimum number of buffers.
This minimum number is defined as NDDS_TRANSPORT_-
PROPERTY_GATHER_SEND_BUFFER_COUNT_MIN.
Table 20.1 Properties for NDDS_Transport_WAN_Property_t
Property Name
(prefix with
‘dds.transport.WAN.wan1.’)
a
Property Value Description

Chapter 20
20-6
parent.parent.message_size_max
The maximum size of a message in bytes that can be sent or received
by the transport plugin.
This value must be set before the transport plugin is registered, so that
RTI Data Distribution Service can properly use the plugin.
If you set this higher than the default, the DomainParticipant’s
buffer_size (in the RECEIVER_POOL QosPolicy (DDS Extension)
(Section 8.5.7)) should also be changed.
parent.parent.allow_interfaces
A list of strings, each identifying a range of interface addresses.
Interfaces must be specified as comma-separated strings, with each
comma delimiting an interface.
If the list is non-empty, this "white" list is applied before the par-
ent.parent.deny_interfaces list.
It is up to the transport plugin to interpret the list of strings passed in.
Usually this interpretation will be consistent with
NDDS_Transport_String_To_Address_Fcn_cEA().
This property is not interpreted by the RTI Data Distribution Service
core; it is provided merely as a convenient and standardized way to
specify the interfaces for the benefit of the transport plugin developer
and user.
You must manage the memory of the list. The memory may be freed
after the DomainParticipant is enabled.
Table 20.1 Properties for NDDS_Transport_WAN_Property_t
Property Name
(prefix with
‘dds.transport.WAN.wan1.’)
a
Property Value Description

20.3 WAN Transport Properties
20-7
20. Configuring WAN
Transports
parent.parent.deny_interfaces
A list of strings, each identifying a range of interface addresses. If the
list is non-empty, deny the use of these interfaces.
Interfaces must be specified as comma-separated strings, with each
comma delimiting an interface.
This "black" list is applied after the parent.parent.allow_interfaces list
and filters out the interfaces that should not be used.
It is up to the transport plugin to interpret the list of strings passed in.
Usually this interpretation will be consistent with
NDDS_Transport_String_To_Address_Fcn_cEA().
This property is not interpreted by the RTI Data Distribution Service
core; it is provided merely as a convenient and standardized way to
specify the interfaces for the benefit of the transport plugin developer
and user.
You must manage the memory of the list. The memory may be freed
after the DomainParticipant is enabled.
parent.send_socket_buffer_size
Size in bytes of the send buffer of a socket used for sending. On most
operating systems, setsockopt() will be called to set the SENDBUF to
the value of this parameter.
This value must be greater than or equal to
parent.parent.message_size_max.
The maximum value is operating system-dependent.
If you configure this parameter to be
NDDS_TRANSPORT_UDPV4_SOCKET_BUFFER_SIZE_OS_DEFAULT,
then setsockopt() (or equivalent) will not be called to size the send buf-
fer of the socket.
Table 20.1 Properties for NDDS_Transport_WAN_Property_t
Property Name
(prefix with
‘dds.transport.WAN.wan1.’)
a
Property Value Description

Chapter 20
20-8
parent.recv_socket_buffer_size
Size in bytes of the receive buffer of a socket used for receiving.
On most operating systems, setsockopt() will be called to set the
RECVBUF to the value of this parameter.
This value must be greater than or equal to parent.par-
ent.message_size_max. The maximum value is operating system-
dependent.
If set to
NDDS_TRANSPORT_UDPV4_SOCKET_BUFFER_SIZE_OS_DEFAULT,
then setsockopt() (or equivalent) will not be called to size the receive
buffer of the socket.
parent.unicast_enabled
Allows the transport plugin to use unicast UDP for sending and
receiving. By default, it will be turned on. Also by default, it will use
all the allowed network interfaces that it finds up and running when
the plugin is instanced.
parent.ignore_loopback_interface
Prevents the transport plugin from using the IP loopback interface.
Three values are allowed:
0: Enable local traffic via this plugin. This plugin will only use and
report the IP loopback interface only if there are no other network
interfaces (NICs) up on the system.
1: Disable local traffic via this plugin. Do not use the IP loopback
interface even if no NICs are discovered. This is useful when you
want applications running on the same node to use a more efficient
plugin like Shared Memory instead of the IP loopback.
-1: Automatic. Lets RTI Data Distribution Service decide among the
above two choices. If a shared memory transport plugin is avail-
able for local traffic, the effective value is 1 (i.e., disable UDPv4
local traffic). Otherwise, the effective value is 0, i.e., use UDPv4 for
local traffic also.
Table 20.1 Properties for NDDS_Transport_WAN_Property_t
Property Name
(prefix with
‘dds.transport.WAN.wan1.’)
a
Property Value Description

20.3 WAN Transport Properties
20-9
20. Configuring WAN
Transports
parent.ignore_nonrunning_
interfaces
Prevents the transport plugin from using a network interface that is
not reported as RUNNING by the operating system.
The transport checks the flags reported by the operating system for
each network interface upon initialization. An interface which is not
reported as UP will not be used. This property allows the same check
to be extended to the IFF_RUNNING flag implemented by some oper-
ating systems. The RUNNING flag is defined to mean that "all
resources are allocated", and may be off if there is no link detected, e.g.,
the network cable is unplugged.
Two values are allowed:
0: Do not check the RUNNING flag when enumerating interfaces,
just make sure the interface is UP.
1: Check the flag when enumerating interfaces, and ignore those that
are not reported as RUNNING. This can be used on some operat-
ing systems to cause the transport to ignore interfaces that are
enabled but not connected to the network.
parent.no_zero_copy
Prevents the transport plugin from doing a zero copy.
By default, this plugin will use the zero copy on OSs that offer it. While
this is good for performance, it may sometime tax the OS resources in a
manner that cannot be overcome by the application.
The best example is if the hardware/device driver lends the buffer to
the application itself. If the application does not return the loaned buf-
fers soon enough, the node may error or malfunction. In case you can-
not reconfigure the H/W, device driver, or the OS to allow the zero
copy feature to work for your application, you may have no choice but
to turn off zero copy use.
By default this is set to 0, so RTI Data Distribution Service will use the
zero-copy API if offered by the OS.
Table 20.1 Properties for NDDS_Transport_WAN_Property_t
Property Name
(prefix with
‘dds.transport.WAN.wan1.’)
a
Property Value Description

Chapter 20
20-10
parent.send_blocking
Controls the blocking behavior of send sockets. CHANGING THIS
FROM THE DEFAULT CAN CAUSE SIGNIFICANT PERFORMANCE
PROBLEMS.
Currently two values are defined:
NDDS_TRANSPORT_UDPV4_BLOCKING_ALWAYS: Sockets are
blocking (default socket options for Operating System).
NDDS_TRANSPORT_UDPV4_BLOCKING_NEVER: Sockets are
modified to make them non-blocking. THIS IS NOT A SUP-
PORTED CONFIGURATION AND MAY CAUSE SIGNIFICANT
PERFORMANCE PROBLEMS.
parent.transport_priority_mask
Mask for the transport priority field. This is used in conjunction with
transport_priority_mapping_low/high to define the mapping from
DDS transport priority to the IPv4 TOS field. Defines a contiguous
region of bits in the 32-bit transport priority value that is used to gen-
erate values for the IPv4 TOS field on an outgoing socket.
For example, the value 0x0000ff00 causes bits 9-16 (8 bits) to be used in
the mapping. The value will be scaled from the mask range (0x0000 -
0xff00 in this case) to the range specified by low and high.
If the mask is set to zero, then the transport will not set IPv4 TOS for
send sockets.
parent.transport_priority_
mapping_low
Sets the low and high values of the output range to IPv4 TOS.
These values are used in conjunction with transport_priority_mask to
define the mapping from DDS transport priority to the IPv4 TOS field.
Defines the low and high values of the output range for scaling.
Note that IPv4 TOS is generally an 8-bit value.
parent.transport_priority_
mapping_high
enable_security Required if you want to use security.
recv_decode_buffer_size
Size of buffer for decoding packets from wire. An extra buffer is
required for storage of encrypted data.
port_offset Port offset to allow coexistence with non-secure UDP transport.
dtls_handshake_resend_interval DTLS handshake retransmission interval in milliseconds
Table 20.1 Properties for NDDS_Transport_WAN_Property_t
Property Name
(prefix with
‘dds.transport.WAN.wan1.’)
a
Property Value Description

20.3 WAN Transport Properties
20-11
20. Configuring WAN
Transports
tls.verify.ca_file
A string that specifies the name of file containing Certificate Authority
certificates. File should be in PEM format. See the OpenSSL manual
page for SSL_load_verify_locations for more information.
If you want to use security, ca_file or ca_path must be specified; both
may be specified.
tls.verify.ca_path
A string that specifies paths to directories containing Certificate
Authority certificates. Files should be in PEM format, and follow the
OpenSSL-required naming conventions. See the OpenSSL manual
page for SSL_CTX_load_verify_locations for more information.
If you want to use security, ca_file or ca_path must be specified; both
may be specified.
tls.verify.verify_depth Maximum certificate chain length for verification.
tls.verify.verify_peer
If non-zero, use mutual authentication when performing TLS hand-
shake (default). If zero, only the reader side will present a certificate,
which will be verified by the writer side.
tls.verify.verify_callback
This can be set to one of three values:
-- "default" selects the default callback
NDDS_Transport_TLS_default_verify_callback()
-- "verbose" selects the verbose callback
NDDS_Transport_TLS_verbose_verify_callback()
-- "none" requests no callback be registered
tls.cipher.cipher_list
List of available (D)TLS ciphers. See the OpenSSL manual page for
SSL_set_cipher_list for more information on the format of this string.
tls.cipher.dh_param_files
List of available Diffie-Hellman (DH) key files. For example:
"foo.h:512,bar.h:256" means:
dh_param_files[0].file = foo.pem,
dh_param_files[0].bits = 512,
dh_param_files[1].file = bar.pem,
dh_param_files[1].bits = 256
tls.cipher.engine_id String ID of OpenSSL cipher engine to request.
Table 20.1 Properties for NDDS_Transport_WAN_Property_t
Property Name
(prefix with
‘dds.transport.WAN.wan1.’)
a
Property Value Description

Chapter 20
20-12
tls.identity.certificate_chain_file
Required if you want to use security. A string that specifies the name
of a file containing an identifying certificate chain (in PEM format). An
identifying certificate is required for secure communication. The file
must be sorted starting with the certificate to the highest level (root
CA). If no private key is specified, this file will be used to load a non-
RSA private key.
tls.identity.private_key_password A string that specifies the password for private key.
tls.identity.private_key_file
A string that specifies that name of a file containing private key (in
PEM format). If no private key is specified (all values are NULL), this
value will default to the same file as the specified certificate chain file.
tls.identity.rsa_private_key_file
A string that specifies that name of a file containing an RSA private
key (in PEM format).
transport_instance_id[0] to
[NDDS_TRANSPORT_
WAN_TRANSPORT_
INSTANCE_ID_LENGTH]
Required A set of comma-separated values to specify the elements of
the array. This value must be unique for all transport instances com-
municating with the same WAN Rendezvous Server.
If less than the full array is specified, it will be right-aligned. For exam-
ple, the string "01,02" results in the array being set to:
{0,0,0,0,0,0,0,0,0,0,1,2}
interface_address Locator, as a string
server Required Server locator, as a string.
server_port Server port number.
stun_retransmission_interval
STUN request messages requiring a response are resent with this inter-
val. The interval is doubled after each retransmission. Specified in
msec.
stun_number_of_retransmissions
Maximum number of times STUN messages are resent unless a
response is received.
stun_liveliness_period
Period at which messages are sent to peers to keep NAT holes open;
and to the WAN server to refresh bound ports. Specified in msec.
a. Assuming you used ‘dds.transport.WAN.wan1’ as the alias to load the plugin. If not, change the prefix to match
the string used with dds.transport.load_plugins.
Table 20.1
Properties for NDDS_Transport_WAN_Property_t
Property Name
(prefix with
‘dds.transport.WAN.wan1.’)
a
Property Value Description

20.4 Secure Transport Properties
20-13
20. Configuring WAN
Transports
20.4 Secure Transport Properties
Table 20.2 lists the properties that you can set for the Secure Transport.
Table 20.2 Properties for NDDS_Transport_DTLS_Property_t
Property Name
(prefix with
‘dds.transport.DTLS.dtls1’)
a
Property Value Description
dds.transport.load_plugins
(note: this does not take a prefix)
Required Comma-separated strings indicating the prefix names of all
plugins that will be loaded by RTI Data Distribution Service. For exam-
ple: “dds.transport.DTLS.dtls1". You will use this string as the prefix to
the property names. See
a
.
Note: you can load up to 8 plugins.
library
Required Must set to "libnddstransporttls.so" (for UNIX/Solaris) or
"nddstransporttls.dll" (for Windows).
This library and the dependent Openssl libraries need to be in the path
during run time for use by RTI Data Distribution Service (in the
LD_LIBRARY_PATH environment variable on UNIX/Solaris systems,
in PATH for Windows systems).
create_function Required Must be "NDDS_Transport_DTLS_create"
aliases
Used to register the transport plugin returned by
NDDS_Transport_DTLS_create() (as specified by
<DTLS_prefix>.create_function) to the DomainParticipant. Aliases
should be specified as comma separated string, with each comma
delimiting an alias. If it is not specified, the prefix (see
a
) is used as the
default alias for the plugin.
network_address
The network address at which to register this transport plugin.
The least significant transport_in.property.address_bit_count will be
truncated. The remaining bits are the network address of the transport
plugin.
This value overwrites the value returned by the output parameter in
NDDS_Transport_create_plugin function as specified in
"<DTLS_prefix>.create_function".

Chapter 20
20-14
verbosity
Specifies the verbosity of log messages from the transport.
Possible values:
-1: silent
0 (default): errors only
1: errors and warnings
2: local status
5 or higher: all messages
parent.address_bit_count
Number of bits in a 16-byte address that are used by the transport.
Should be between 0 and 128. For example, for an address range of 0-
255, the address_bit_count should be set to 8.
parent.properties_bitmap
A bitmap that defines various properties of the transport to the RTI Data
Distribution Service core. Currently, the only property supported is
whether or not the transport plugin will always loan a buffer when RTI
Data Distribution Service tries to receive a message using the plugin. This
is in support of a zero-copy interface.
parent.gather_send_buffer_
count_max
Specifies the maximum number of buffers that RTI Data Distribution Ser-
vice can pass to the transport plugin’s send() function.
parent.message_size_max
The maximum size of a message in bytes that can be sent or received by
the transport plugin.
Note: If you use a value greater than the default, the DomainParticipant’s
buffer_size (in the RECEIVER_POOL QosPolicy (DDS Extension) (Sec-
tion 8.5.7)) should also be changed.
parent.allow_interfaces
A list of strings, each identifying a range of interface addresses.
Interfaces must be specified as comma-separated strings, with each
comma delimiting an interface.
If the list is non-empty, this "white" list is applied before the par-
ent.deny_interfaces list.
You must manage the memory of the list. The memory may be freed
after the DomainParticipant is enabled.
Table 20.2 Properties for NDDS_Transport_DTLS_Property_t
Property Name
(prefix with
‘dds.transport.DTLS.dtls1’)
a
Property Value Description

20.4 Secure Transport Properties
20-15
20. Configuring WAN
Transports
parent.deny_interfaces
A list of strings, each identifying a range of interface addresses.
Interfaces should be specified as comma-separated strings, with each
comma delimiting an interface.
This "black" list is applied after the parent.allow_interfaces list and fil-
ters out the interfaces that should not be used.
You must manage the memory of the list. The memory may be freed
after the DomainParticipant is enabled.
send_socket_buffer_size Size in bytes of the send buffer of a socket used for sending.
recv_socket_buffer_size Size in bytes of the receive buffer of a socket used for sending.
ignore_loopback_interface Prevents the Transport Plugin from using the IP loopback interface.
ignore_nonrunning_interfaces
Prevents the transport plugin from using a network interface that is not
reported as RUNNING by the operating system.
The transport checks the flags reported by the operating system for each
network interface upon initialization. An interface which is not
reported as UP will not be used. This property allows the same check to
be extended to the IFF_RUNNING flag implemented by some operat-
ing systems. The RUNNING flag is defined to mean that "all resources
are allocated", and may be off if there is no link detected, e.g., the net-
work cable is unplugged.
Two values are allowed:
0: Do not check the RUNNING flag when enumerating interfaces, just
make sure the interface is UP.
1: Check the flag when enumerating interfaces, and ignore those that
are not reported as RUNNING. This can be used on some operating
systems to cause the transport to ignore interfaces that are enabled
but not connected to the network.
transport_priority_mask Mask for use of transport priority field.
transport_priority_mapping_low
Low and high values of output range to IPv4 TOS.
transport_priority_mapping_high
recv_decode_buffer_size
Size of buffer for decoding packets from wire. An extra buffer is
required for storage of encrypted data.
port_offset Port offset to allow coexistence with non-secure UDP transport.
Table 20.2 Properties for NDDS_Transport_DTLS_Property_t
Property Name
(prefix with
‘dds.transport.DTLS.dtls1’)
a
Property Value Description

Chapter 20
20-16
dtls_handshake_resend_interval DTLS handshake retransmission interval in milliseconds
dtls_connection_liveliness_
interval
Liveliness interval (multiple of resend interval)
The connection will be dropped if no message from the peer is received
in this amount of time. This enables cleaning up state for peers that are
no longer responding. A secure keep-alive message will be sent every
half-interval if no other sends have occurred for a given DTLS connec-
tion during that time.
tls.verify.ca_file
A string that specifies the name of file containing Certificate Authority
certificates. File should be in PEM format. See the OpenSSL manual
page for SSL_load_verify_locations for more information.
ca_file or ca_path must be specified; both may be specified.
tls.verify.ca_path
A string that specifies paths to directories containing Certificate
Authority certificates. Files should be in PEM format, and follow the
OpenSSL-required naming conventions. See the OpenSSL manual page
for SSL_CTX_load_verify_locations for more information.
ca_file or ca_path must be specified; both may be specified.
tls.verify.verify_depth Maximum certificate chain length for verification.
tls.verify.verify_peer
If non-zero, use mutual authentication when performing TLS hand-
shake (default). If zero, only the reader side will present a certificate,
which will be verified by the writer side.
tls.verify.verify_callback
This can be set to one of three values:
-- "default" selects the default callback
NDDS_Transport_TLS_default_verify_callback()
-- "verbose" selects the verbose callback
NDDS_Transport_TLS_verbose_verify_callback()
-- "none" requests no callback be registered
tls.cipher.cipher_list
List of available (D)TLS ciphers. See the OpenSSL manual page for
SSL_set_cipher_list for more information on the format of this string.
tls.cipher.dh_param_files
List of available Diffie-Hellman (DH) key files. For example:
"foo.h:512,bar.h:256" means:
dh_param_files[0].file = foo.pem,
dh_param_files[0].bits = 512,
dh_param_files[1].file = bar.pem,
dh_param_files[1].bits = 256
Table 20.2 Properties for NDDS_Transport_DTLS_Property_t
Property Name
(prefix with
‘dds.transport.DTLS.dtls1’)
a
Property Value Description

20.5 Explicitly Instantiating a WAN or Secure Transport Plugin
20-17
20. Configuring WAN
Transports
20.5 Explicitly Instantiating a WAN or Secure Transport Plugin
As described on page 20-1, there are two ways to instantiate a transport plugin. This sec-
tion describes the mechanism that includes calling NDDSTransportSup-
port::register_transport(). (The other way is to use the Property QoS mechanism,
described in Section 20.2).
Notes:
❏ This way of instantiating a transport is not supported in the Java API. If you are
using Java, use the Property QoS mechanism, described in Section 20.2.
❏ To use this mechanism, there are extra libraries that you must link into your
program and an additional header file that you must include. Please see the
Section 20.5.1 and Section 20.5.2 for details.
tls.cipher.engine_id String ID of OpenSSL cipher engine to request.
tls.identity.certificate_chain_file
Required A string that specifies the name of a file containing an identi-
fying certificate chain (in PEM format). An identifying certificate is
required for secure communication. The file must be sorted starting
with the certificate to the highest level (root CA). If no private key is
specified, this file will be used to load a non-RSA private key.
tls.identity.private_key_password A string that specifies the password for private key.
tls.identity.private_key_file
A string that specifies that name of a file containing private key (in PEM
format). If no private key is specified (all values are NULL), this value
will default to the same file as the specified certificate chain file.
tls.identity.rsa_private_key_file
A string that specifies that name of a file containing an RSA private key
(in PEM format).
a. Assuming you used ‘dds.transport.DTLS.dtls1’ as the alias to load the plugin. If not, change the prefix to match the
string used with dds.transport.load_plugins
Table 20.2
Properties for NDDS_Transport_DTLS_Property_t
Property Name
(prefix with
‘dds.transport.DTLS.dtls1’)
a
Property Value Description

Chapter 20
20-18
To instantiate a WAN or Secure Transport prior to explicitly registering it with
NDDSTransportSupport::register_transport(), use one of the following functions:
NDDS_Transport_Plugin* NDDS_Transport_WAN_new (
const struct NDDS_Transport_WAN_Property_t * property_in)
NDDS_Transport_Plugin* NDDS_Transport_DTLS_new (
const struct NDDS_Transport_DTLS_Property_t * property_in)
See the online (HTML) documentation for details on these functions.
20.5.1 Additional Header Files and Include Directories
❏ To use the Secure WAN Transport API, you must include an extra header file (in
addition to those in Table 9.1, “Header Files to Include for RTI Data Distribution
Service (All Architectures),” on page 9-2).
#include "ndds/ndds_transport_secure_wan.h"
Assuming that RTI Secure WAN Transport is installed in the same directory as RTI
Data Distribution Service (see Table 9.2, “Include Paths for Compilation (All
Architectures),” on page 9-3), no additional include paths need to be added for
the Secure WAN Transport API. If this is not the case, you will need to specify
the appropriate include path.
❏ If you want to access OpenSSL data structures, add the OpenSSL include direc-
tory, <openssl install dir>/<arch>/include, and include the OpenSSL headers
before ndds_transport_secure_wan.h:
#include <openssl/ssl.h>
#include <openssl/x509.h> (if accessing certificate functions)
etc.
On Windows systems, if you are loading statically: you should also include the
OpenSSL file, applink.c, in your application. It can be found in the OpenSSL
include directory, or included as <openssl/applink.c>.
20.5.2 Additional Libraries
To use the Secure WAN Transport API, you must link in additional libraries, which are
listed in the Platform Notes (in the appropriate section for your architecture). Refer to
Section 9.3.1 for differences between shared and static libraries.
20.5.3 Compiler Flags
No additional compiler flags are required.

Part 5: RTI Persistence Service
The material in this part of the manual describes RTI Persistence Service, which is
included with RTI Data Distribution Service Professional Edition and Elite Edition. It saves
data samples so they can be delivered to subscribing applications that join the system at
a later time—even if the publishing application has already terminated.
❏ Chapter 21: Introduction to RTI Persistence Service
❏ Chapter 22: Configuring RTI Persistence Service
❏ Chapter 23: Running RTI Persistence Service

Part 5. RTI Persistence Service

21-1
21. Introduction to
RTI Persistence
Service
Chapter 21 Introduction to RTI Persistence Service
RTI Persistence Service is an RTI Data Distribution Service application that saves data sam-
ples to transient or permanent storage, so they can be delivered to subscribing applica-
tions that join the system at a later time—even if the publishing application has already
terminated.
RTI Persistence Service runs as a separate application; you can run it on the same node as
the publishing application, the subscribing application, or some other node in the net-
work.
When configured to run in PERSISTENT mode, RTI Persistence Service can use the file-
system or a relational database that provides an ODBC driver. For each persistent topic,
it collects all the data written by the corresponding persistent DataWriters and stores
them into persistent storage. See the Release Notes for the list of platforms and rela-
tional databases that have been tested.
When configured to run in TRANSIENT mode, RTI Persistence Service stores the data in
memory.
The following chapters assume you have a basic understanding of DDS terms such as
DomainParticipants, Publishers, DataWriters, Topics, and Quality of Service (QoS) policies.
For an overview of DDS terms, please see Chapter 2: Data-Centric Publish-Subscribe
Communications. You should also have already read Chapter 11: Mechanisms for
Achieving Information Durability and Persistence.

Chapter 21
21-2

22-1
22. Configuring RTI
Persistence Service
Chapter 22 Configuring RTI Persistence Service
To use RTI Persistence Service:
1. Modify your RTI Data Distribution Service applications.
• The DURABILITY QosPolicy (Section 6.5.6) controls whether or not, and how,
published samples are stored by RTI Persistence Service for delivery to late-
joining DataReaders. See Data Durability (Section 11.5).
• For each DataWriter whose data must be stored, set the Durability
QosPolicy’s kind to DDS_PERSISTENT_DURABILITY_QOS or
DDS_TRANSIENT_DURABILITY_QOS.
• For each DataReader that needs to receive stored data, set the Durability
QosPolicy’s kind to DDS_PERSISTENT_DURABILITY_QOS or
DDS_TRANSIENT_DURABILITY_QOS.
• Optionally, modify the DURABILITY SERVICE QosPolicy (Section 6.5.7),
which can be used to configure RTI Persistence Service.
By default, the History and ResourceLimits QosPolicies for a Persistence Service
DataReader (PRSTDataReader) and Persistence Service DataWriter (PRST-
DataWriter) with topic 'A' will be configured using the DurabilityService
QosPolicy of the first-discovered DataWriter publishing 'A'. (For more informa-
tion on the PRSTDataReader and PRSTDataWriter, see RTI Persistence Service
(Section 11.5.1).) These values will overwrite the values specified in the XML file
(unless you use the tag <use_durability_service> in the persistence group defi-
nition, see Section 22.7).
2. Create a configuration file or edit an existing file, as described in XML Configu-
ration File (Section 22.2).
Chapter 22
22-2
3. Start RTI Persistence Service with your configuration file, as described in Starting
RTI Persistence Service (Section 23.1). You can start it on either application’s
node, or even an entirely different node (provided that node is included in one of
the applications’ NDDS_DISCOVERY_PEERS lists).
22.1 How to Load the XML Configuration
RTI Persistence Service loads its XML configuration from multiple locations. This section
presents the various approaches, listed in load order.
The first three locations only contain QoS Profiles and are inherited from RTI Data Dis-
tribution Service (see Chapter 15 in the RTI Data Distribution Service User's Manual).
❏ $NDDSHOME/resource/qos_profiles_4.5x
1
/xml/NDDS_QOS_PROFILES.xml
This file contains the RTI Data Distribution Service default QoS values; it is loaded
automatically if it exists. (First to be loaded.)
❏ File specified in NDDS_QOS_PROFILES Environment Variable
The files (or XML strings) separated by semicolons referenced in this environ-
ment variable are loaded automatically.
❏ <working directory>/USER_QOS_PROFILES.xml
This file is loaded automatically if it exists.
The next locations are specific to RTI Persistence Service.
❏ <RTI Persistence Service executable location>/../../resource/xml/
RTI_PERSISTENCE_SERVICE.xml
This file contains the default RTI Persistence Service configurations; it is loaded if
it exists. There are two default configurations: default and defaultDisk. The
default configuration persists all the topics into memory. The defaultDisk con-
figuration persists all the topics into files located in the current working direc-
tory.
❏ <working directory>/USER_PERSISTENCE_SERVICE.xml
This file is loaded automatically if it exists.
1. x stands for the version letter of the current release.
22.2 XML Configuration File
22-3
22. Configuring RTI
Persistence Service
❏ File specified using the command line option, -cfgFile
The command-line option -cfgFile (see Table 23.1 in the Getting Started Guide)
can be used to specify a configuration file.
22.2 XML Configuration File
The configuration file uses XML format. Let's look at a very basic configuration file, just
to get an idea of its contents. You will learn the meaning of each line as you read the rest
of this chapter:
❏ QoS Configuration (Section 22.3)
❏ Configuring the RTI Persistence Service Application (Section 22.4)
❏ Configuring the RTI Persistence Service Application (Section 22.4)
❏ Configuring the Persistent Storage (Section 22.5)
❏ Configuring Participants (Section 22.6)
❏ Creating Persistence Groups (Section 22.7)
Example Configuration File
<?xml version="1.0" encoding="ISO-8859-1"?>
<!-- A Configuration file may be used by several
persistence services specifying multiple
<persistence_service> entries
-->
<dds>
<!-- QoS LIBRARY SECTION -->
<qos_library name="QosLib1">
<qos_profile name="QosProfile1">
<writer_qos name="WriterQos1">
<history>
<kind>DDS_KEEP_ALL_HISTORY_QOS</kind>
</history>
</writer_qos>
<reader_qos name="ReaderQos1">
<reliability>
<kind>DDS_RELIABLE_RELIABILITY_QOS</kind>
</reliability>
<history>
<kind>DDS_KEEP_ALL_HISTORY_QOS</kind>

Chapter 22
22-4
</history>
</reader_qos>
</qos_profile>
</qos_library>
<!-- PERSISTENCE SERVICE SECTION -->
<persistence_service name="Srv1">
<!-- PERSISTENT STORAGE SECTION -->
<persistent_storage>
<filesystem>
<directory>/tmp</directory>
<file_prefix>PS</file_prefix>
</filesystem>
</persistent_storage>
<!-- DOMAIN PARTICIPANT SECTION -->
<participant name="Part1">
<domain_id>71</domain_id>
<!-- PERSISTENCE GROUP SECTION -->
<persistence_group name="PerGroup1" filter="*">
<single_publisher>true</single_publisher>
<single_subscriber>true</single_subscriber>
<writer_qos base_name="QosLib1::QosProfile1"/>
<reader_qos base_name="QosLib1::QosProfile1"/>
</persistence_group>
</participant>
</persistence_service>
</dds>
22.2.1 Configuration File Syntax
The configuration file must follow these syntax rules:
❏ The syntax is XML and the character encoding is UTF-8.
❏ Opening tags are enclosed in <>; closing tags are enclosed in </>.
❏ A value is a UTF-8 encoded string. Legal values are alphanumeric characters. All
leading and trailing spaces are removed from the string before it is processed.
For example, " <tag> value </tag>" is the same as "<tag>value</tag>".
❏ All values are case-sensitive unless otherwise stated.
❏ Comments are enclosed as follows: <!-- comment -->.
22.2 XML Configuration File
22-5
22. Configuring RTI
Persistence Service
❏ The root tag of the configuration file must be <dds> and end with </dds>.
❏ The primitive types for tag values are specified in Table 22.1.
22.2.2 XML Validation
22.2.2.1 Validation at Run-Time
RTI Persistence Service validates the input XML files using a builtin Document Type Def-
inition (DTD). You can find a copy of the builtin DTD in $(NDDSHOME)/resource/rti-
persistenceservice/schema/rti_persistence_service.dtd. (This is only a copy of what the
RTI Persistence Service core uses. Changing this file has no effect unless you specify its
path with the DOCTYPE tag, described below.)
You can overwrite the builtin DTD by using the XML tag, <!DOCTYPE>. For example,
the following indicates that RTI Persistence Service must use a different DTD file to per-
form validation:
<!DOCTYPE dds SYSTEM
"/local/usr/rti/dds/modified_rtipersistenceservice.dtd">
Table 22.1 Supported Tag Values
Type Format Notes
DDS_Boolean
yes, 1, true, BOOLEAN_TRUE or
DDS_BOOLEAN_TRUE: these all mean TRUE
Not case-sensitive
no, 0, false, BOOLEAN_FALSE or
DDS_BOOLEAN_FALSE: these all mean FALSE
DDS_Enum
A string. Legal values are those listed in the
online (HTML) documentation for the C or Java
API.
Must be specified as a
string. (Do not use
numeric values.)
DDS_Long
-2147483648 to 2147483647
or 0x80000000 to 0x7fffffff
or LENGTH_UNLIMITED
or DDS_LENGTH_UNLIMITED
A 32-bit signed inte-
ger
DDS_UnsignedLong
0 to 4294967296
or
0 to 0xffffffff
A 32-bit unsigned
integer
String UTF-8 character string
All leading and trail-
ing spaces are ignored
between two tags

Chapter 22
22-6
If you do not specify the DOCTYPE tag in the XML file, the builtin DTD is used.
The DTD path can be absolute, or relative to the application's current working directory.
22.2.2.2 Validation During Editing
RTI Persistence Service provides DTD and XSD files that describe the format of the XML
content. We recommend including a reference to one of these documents in the XML file
that contains the persistence service’s configuration—this provides helpful features in
code editors such as Visual Studio and Eclipse, including validation and auto-comple-
tion while you are editing the XML file. Including a reference to the XSD file in the XML
documents provides stricter validation and better auto-completion than the correspond-
ing DTD file.
The DTD and XSD definitions of the XML elements are in
$(NDDSHOME)/resource/rtipersistenceservice/schema/rti_persistence_service.dtd
and
$(NDDSHOME)/resource/rtipersistenceservice/schema/rti_persistence_service.xsd,
respectively.
To include a reference to the XSD document in your XML file, use the attribute xsi:noN-
amespaceSchemaLocation in the <dds> tag. For example (in the following, replace
<NDDSHOME> with the RTI Data Distribution Service installation directory):
<?xml version="1.0" encoding="UTF-8"?>
<dds xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance"
xsi:noNamespaceSchemaLocation=
"<NDDSHOME>/resource/rtipersistenceservice/schema/rti_persistence_service.xsd">
...
</dds>
To include a reference to the DTD document in your XML file, use the <!DOCTYPE>
tag. For example (in the following, replace <NDDSHOME> with the RTI Data Distribu-
tion Service installation directory):
<?xml version="1.0" encoding="UTF-8"?>
<!DOCTYPE dds SYSTEM
"<NDDSHOME>/resource/rtipersistenceservice/schema/rti_persistence_service.dtd">
<dds>
...
</dds>

22.3 QoS Configuration
22-7
22. Configuring RTI
Persistence Service
22.3 QoS Configuration
Each persistence group and participant has a set of DDS QoSs. There are six tags:
❏ <participant_qos>
❏ <publisher_qos>
❏ <subscriber_qos>
❏ <topic_qos>
❏ <datawriter_qos>
❏ <datareader_qos>
Each QoS is identified by a name. The QoS can inherit its values from other QoSs
described in the XML file. For example:
<datawriter_qos name="DerivedWriterQos" base_qos_name="Lib::BaseWriter-
Qos">
<history>
<kind>DDS_KEEP_ALL_HISTORY_QOS</kind>
</history>
</datawriter_qos>
In the above example, the writer QoS named 'DerivedWriterQos' inherits the values
from the writer QoS 'BaseWriterQos' contained in the library 'Lib'. The HistoryQosPol-
icy kind is set to DDS_KEEP_ALL_HISTORY_QOS.
Each XML tag with an associated name can be uniquely identified by its fully qualified
name in C++ style. For more information on tags, see Chapter 15: Configuring QoS with
XML
The persistence groups and participants can use QoS libraries and profiles to configure
their QoS values. For example:
<dds>
<!- QoS LIBRARY SECTION -->
<qos_library name="QosLib1">
<qos_profile name="QosProfile1">
<datawriter_qos name="WriterQos1">
<history>
<kind>DDS_KEEP_ALL_HISTORY_QOS</kind>
</history>
</datawriter_qos>
</qos_profile>
</qos_library>

Chapter 22
22-8
<!-PERSISTENCE SERVICE SECTION -->
<persistence_service name="Srv1">
...
<!-PERSISTENCE GROUP SECTION -->
<persistence_group name="PerGroup1" filter="*">
<single_publisher>true</single_publisher>
<single_subscriber>true</single_subscriber>
<datawriter_qos base_name="QosLib1::QosProfile1"/>
</persistence_group>
</persistence_service>
</dds >
For more information about QoS libraries and profiles see Chapter 15: Configuring QoS
with XML.
22.4 Configuring the RTI Persistence Service Application
Each execution of the RTI Persistence Service application is configured using the content
of a persistence service application tag (<persistence_service>). When you start RTI Per-
sistence Service (described in Section 23.1), you must specify which
<persistence_service> tag to use to configure the service.
For example:
<dds>
<persistence_service name="Srv1">
...
</persistence_service>
</dds>
If you do not specify a service name when you start RTI Persistence Service, the service
will print the list of available configurations and then exit.
Because a configuration file may contain multiple <persistence_service> tags, one file
can be used to configure multiple RTI Persistence Service executions.
Table 22.2 lists the tags you can specify for a persistence service. For default values,
please see the online (HTML) documentation.

22.4 Configuring the RTI Persistence Service Application
22-9
22. Configuring RTI
Persistence Service
Table 22.2 Persistence Service Application Tags
Tag Description
Number
of Tags
Allowed
<annotation>
Provides a description for the persistence service configuration.
Example:
<annotation>
<documentation>
Persists in the file system all topics published
with PERSISTENT durability
</documentation>
</annotation>
0 or 1
<persistent_storage>
When this tag is present, the topic data will be persisted to disk.
You can select between file storage and relational database stor-
age. See Section 22.5.
0 or 1
<participant>
For each <participant> tag, RTI Persistence Service creates two
DomainParticipants on the same domain ID:
one to subscribe to changes and one to publish changes.
The QoS values used to configure both participants are the
same, except for WireProtocol.domain_id.
If WireProtocol.domain_id is not -1 (the default value), RTI Per-
sistence Service uses WireProtocol.domain_id for the first
domain DomainParticipant and WireProtocol.domain_id+1 for
the second DomainParticipant.
1 or more
<synchronization>
A DDS_Boolean (see Table 22.1) that indicates if redundant per-
sistence service instances should synchronize their states with
one another.
When set to TRUE, messages lost on the way to one service
instance can be repaired by another without impacting the origi-
nal publisher of that message.
To synchronize the instances, the tag <synchronize> must be set
to true in every instance involved in the synchronization.
Note: This synchronization mechanism is not equivalent to data-
base replication. The extent to which database instances have
identical contents depends on the destination ordering and
other QoS settings for the persistence service instances.
Default: 0
0 or 1

Chapter 22
22-10
22.5 Configuring the Persistent Storage
The <persistent_storage> tag is used to persist samples into permanent storage. If the
<persistence_storage> tag is not specified, the service will operate in TRANSIENT
mode and all the data will be kept in memory. Otherwise, the persistence service will
operate in PERSISTENT mode and all the topic data will be stored into the filesystem or
into a relational database that provides an ODBC driver.
Table 22.3 lists the tags that you can specify in <persistent_storage>.
Table 22.5 and Table 22.4 list the tags that you can specify in <filesystem> and
<external_database> .
Relational Database Limitations: The ODBC storage does not support BLOBs. The maxi-
mum size for a serialized sample is 65535 bytes in MySQL and 4194304 bytes in Times-
Ten.
Table 22.3 Persistent Storage tags
Tag Description
Number
of Tags
Allowed
<filesystem>
When this tag is present, the topic data will be persisted into
files.
This tag is required if <external_database> is not specified.
0 or 1
<external_database>
When this tag is present, the topic data will be persisted in a
relational database.
This tag is required if <filesystem> is not specified.
0 or 1
<restore>
This DDS_Boolean (see Table 22.1) indicates if the topic data
associated with a previous execution of the persistence ser-
vice must be restored or not. If the topic data is not restored,
it will be deleted from the persistent storage.
Default: 1
0 or 1
22.5 Configuring the Persistent Storage
22-11
22. Configuring RTI
Persistence Service
Table 22.4 Filesystem tags
Tag Description
Number
of Tags
Allowed
<directory>
Specifies the directory of the files in which topic data will be per-
sisted. There will be one file per PRSTDataWriter/PRSTDa-
taReader pair.
Default: current working directory
0 or 1
<file_prefix>
A name prefix associated with all the files created by RTI Persis-
tence Service.
Default: PS
0 or 1
<synchronization>
Determines the level of synchronization with the physical disk.
This tag can take three values:
• FULL: Every sample is written into physical disk as RTI Per-
sistence Service receives it.
• NORMAL: Samples are written into disk at critical
moments.
• OFF: No synchronization is enforced. Data will be written to
physical disk when the OS flushes its buffers.
Default: OFF
0 or 1
Table 22.5 External Database Tags
Tag Description
Number
of Tags
Allowed
<dsn>
DSN used to connect to the database using ODBC. You should
create this DSN through the ODBC settings on Windows sys-
tems, or in your .odbc.ini file on UNIX/Linux systems.
This tag is required.
1
<username>
Username to connect to the database.
Default: no username is used
0 or 1
<password>
Password to connect to the database.
Default: no username is used
0 or 1
<odbc_library>
Specifies the ODBC driver to load. By default, RTI Data Distribu-
tion Service will try to use the standard ODBC driver manager
library (UnixOdbc on UNIX/Linux systems, the Windows
ODBC driver manager on Windows systems).
0 or 1

Chapter 22
22-12
22.6 Configuring Participants
An XML <persistence_service> tag will contain a set of domain participants. The persis-
tence service will persist topics published in the domainIDs associated with these par-
ticipants. For example:
<persistence_service name="Srv1">
<participant name="Part1">
<domain_id>71</domain_id>
...
</participant>
<participant name="Part2">
<domain_id>72</domain_id>
...
</participant>
</persistence_service>
Using the above example, the persistence service will create two domain participants on
domains 71 and 72. After the domain participants are created, the persistence service
will monitor the discovery traffic looking for topics to persist.
The <domain_id> tag can be specified alternatively as an attribute of <participant>. For
example:
<persistence_service name="Srv1">
<participant name="Part1" domain_id="71">
...
</participant>
</persistence_service>
Table 22.6 further describes the participant tags.
Table 22.6 Participant Tags
Tag Description
Number
of Tags
Allowed
<domain_id>
Domain ID associated with the Participant. The domain ID
can be specified as an attribute of the participant tag.
Default: 0
0 or 1
<participant_qos>
Participant QoS.
Default: DDS defaults
0 or 1
<persistence_group>
A persistence group describes a set of topics whose data that
must be persisted by the persistence service.
1 or more

22.7 Creating Persistence Groups
22-13
22. Configuring RTI
Persistence Service
22.7 Creating Persistence Groups
The topics that must be persisted in a specific domain ID are specified using
<persistence_group> tags. A <persistence_group> tag defines a set of topics identified
by a POSIX expression.
For example:
<participant name="Part1">
<domain_id>71</domain_id>
<persistence_group name="PerGroup1" filter="H*">
...
</persistence_group>
</participant>
In the previous example, the persistence group 'PerGroup1' is associated with all the
topics published in domain 71 whose name starts with 'H'.
When a participant discovers a topic that matches a persistence group, it will create a
PRSTDataReader and a PRSTDataWriter. The PRSTDataReader and PRSTDataWriter
will be configured using the QoS policies associated with the persistence group. The
samples received by the PRSTDataReader will be persisted in the queue of the corre-
sponding PRSTDataWriter.
A <participant> tag can contain multiple persistence groups; the set of topics that each
one represents can intersect.
Table 22.7 further describes the persistence group tags. For default values, please see the
online (HTML) documentation.
Chapter 22
22-14
Table 22.7 Persistence Group Tags
Tag Description
Number
of Tags
Allowed
<filter>
A list of POSIX expressions separated by commas that describe the
set of topics associated with the persistence group.
The filter can be specified as an attribute of <persistence_group> as
well.
Default: *
0 or 1
<content_filter>
Content filter topic expression. A persistence group can subscribe to
a specific set of data based on the value of this expression.
A filter expression is similar to the WHERE clause in SQL. For more
information on the syntax, please see the online documentation
(from the Modules page, select DDS API Reference, Queries and Fil-
ters Syntax.
Default: no expression)
0 or 1
<propagate_dispose>
A DDS_Boolean (see Table 22.1) that controls whether or not the per-
sistence service propagates dispose messages from DataWriters to
DataReaders.
Default: 1
0 or 1
<propagate_unregister>
A DDS_Boolean (see Table 22.1) that controls whether or not the per-
sistence service propagates unregister messages from DataWriters to
DataReaders.
Default: 0
0 or 1
<single_publisher>
A DDS_Boolean (see Table 22.1) that indicates if the persistence ser-
vice should create one Publisher per persistence group or one Pub-
lisher per PRSTDataWriter inside the persistence group.
Default: 1
0 or 1
<single_subscriber>
A DDS_Boolean (see Table 22.1) that indicates if the persistence ser-
vice should create one Subscriber per persistence group or one Sub-
scriber per PRSTDataReader in the persistence group.
Default: 1
0 or 1
<use_durability_
service>
A DDS_Boolean (see Table 22.1) that indicates if the HISTORY and
RESOURCE_LIMITS QoS policy of the PRSTDataWriters and PRST-
DataReaders should be configured based on the DURABILITY SER-
VICE value of the discovered DataWriters.
Default: 1
0 or 1

22.7 Creating Persistence Groups
22-15
22. Configuring RTI
Persistence Service
<share_database_
connection>
A DDS_Boolean (see Table 22.1) that indicates if the persistence ser-
vice will create an independent database connection per PRST-
DataWriter in the group (0) or per Publisher (1) in the group.
When <single_publisher> is 0 and <share_database_connection> is
1, there is a single database connection per group. All the PRST-
DataWriters will share the same connection.
When <single_publisher> is 1 or <share_database_connection> is 0,
there is a database connection per PRSTDataWriter.
This parameter is only applicable to configurations persisting the
data into a relational database using the tag <external_database> in
<persistent_storage>.
Default: 0
0 or 1
<reader_checkpoint_
frequency>
This property controls how often (expressed as a number of sam-
ples) the PRSTDataReader state is stored in the database. The PRST-
DataReaders are the DDS DataReaders created by the persistence
service.
A high frequency will provide better performance. However, if the
persistence service is restarted, it may receive some duplicate sam-
ples. The persistence service will send these duplicates samples on
the wire but they will be filtered by the DDS DataReaders and they
will not be propagated to the application.
This property is only applicable when the persistence service oper-
ates in persistent mode (the <persistent_storage> tag is present).
Default: 1
0 or 1
Table 22.7 Persistence Group Tags
Tag Description
Number
of Tags
Allowed

Chapter 22
22-16
<writer_in_memory_
state>
A DDS_Boolean (see Table 22.1) that determines how much state
will be kept in memory by the PRSTDataWriters in order to avoid
accessing the persistent storage.
The property is only applicable when the persistence service oper-
ates in persistent mode (the <persistent_storage> tag is present).
If this property is 1, the PRSTDataWriters will keep a copy of all the
instances in memory. They will also keep a fixed state overhead of 24
bytes per sample. This mode provides the best performance. How-
ever, the restore operation will be slower and the maximum number
of samples that a PRSTDataWriter can manage will be limited by the
available physical memory.
If this property is 0, all the state will be kept in the underlying persis-
tent storage. In this mode, the maximum number of samples that a
PRSTDataWriter can manage will not be limited by the available
physical memory unless the underlying persistent storage is an in-
memory database (TimesTen).
Default: For KEEP_LAST or ResourceLimitsQosPol-
icy.max_samples != DDS_UNLIMITED_LENGTH, the default is 1.
Otherwise, the default is 0.
0 or 1
<topic_qos>
Topic QoS.
Default: DDS defaults
0 or 1
<publisher_qos>
Publisher QoS.
Default: DDS defaults
0 or 1
<subscriber_qos>
Subscriber QoS
Default: DDS defaults
0 or 1
<writer_qos>
PRSTDataWriter QoS
a
Default: DDS defaults
0 or 1
<reader_qos>
PRSTDataReader QoS
a
Default: DDS defaults
0 or 1
a. These fields cannot be set and are assigned automatically: protocol.virtual_guid, protocol.rtps_object_id, durabil-
ity.kind.
Table 22.7
Persistence Group Tags
Tag Description
Number
of Tags
Allowed

22.7 Creating Persistence Groups
22-17
22. Configuring RTI
Persistence Service
22.7.1 QoSs
When a persistence service discovers a topic 'A' that matches a specific persistence
group, it creates a reader (known as ‘PRSTDataReader’) and writer (‘PRSTDataWriter’)
to persist that topic. The QoSs associated with these readers and writers, as well as the
corresponding Publishers and Subscribers, can be configured inside the persistence
group using QoS tags.
For example:
<participant name="Part1">
<domain_id>71</domain_id>
<persistence_group name="PerGroup1" filter="*">
...
<publisher_qos base_qos_name="QosLib1::PubQos1"/>
<subscriber_qos base_qos_name="QosLib1::SubQos1"/>
<writer_qos base_qos_name="QosLib1::WriterQos1"/>
<reader_qos base_qos_name="QosLib1::ReaderQos1"/>
...
</persistence_group>
</participant>
For instance, the number of samples saved by RTI Persistence Service is configurable
through the HISTORY QosPolicy (Section 6.5.8) of the PRSTDataWriters.
If a QoS tag is not specified the persistence service will use the corresponding RTI Data
Distribution Service default values (Section 22.7.2 describes an exception to this rule).
22.7.2 Durability Service Qos Policy
The DURABILITY SERVICE QosPolicy (Section 6.5.7) associated with a DataWriter is
used to configure the HISTORY and the RESOURCE_LIMITS associated with the PRST-
DataReaders and PRSTDataWriters.
By default, the HISTORY and RESOURCE_LIMITS of a PRSTDataReader and PRST-
DataWriter with topic 'A' will be configured using the DURABILITY_SERVICE value of
the first discovered DataWriter publishing 'A'. These values will overwrite the values
specified in the XML file.
To not overwrite the XML values, you can use the tag <use_durability_service> in the
persistence group definition:

Chapter 22
22-18
<participant name="Part1">
<domain_id>71</domain_id>
<persistence_group name="PerGroup1" filter="*">
...
<use_durability_service/>0</ use_durability_service>
...
</persistence_group>
</participant>
22.7.3 Sharing a Publisher/Subscriber
By default, the PRSTDataWriters and PRSTDataReaders associated with a persistence
group will share the same Publisher and Subscriber.
To associate a different Publisher and Subscriber with each PRSTDataWriter and PRST-
DataReader, use the tags <single_publisher> and <single_subscriber>, as follows:
<participant name="Part1">
<domain_id>71</domain_id>
<persistence_group name="PerGroup1" filter="*">
...
<single_publisher/>0</single_publisher>
<single_subscriber/>0</single_subscriber>
...
</persistence_group>
</participant>
22.7.4 Sharing a Database Connection
By default, the persistence service will share a single ODBC database connection to per-
sist the topic data received by each PRSTDataReader.
To associate an independent database connection to the PRSTDataReaders created by
the persistence service, use the tag <share_database_connection>, as follows:
<participant name="Part1">
<domain_id>71</domain_id>
<persistence_group name="PerGroup1" filter="*">
...
<share_database_connection>0</share_database_connection>
...
</persistence_group>
</participant>
Sharing a database connection optimizes the resource usage. However, the concurrency
of the system decreases because the access to the database connection must be pro-
tected.

23-1
23. Running RTI
Persistence Service
Chapter 23 Running RTI Persistence Service
This chapter describes how to start and stop RTI Persistence Service.
You can run RTI Persistence Service on any node in the network. It does not have to be
run on the same node as the publishing or subscribing applications for which it is sav-
ing/delivering data. If you run it on a separate node, make sure that the other applica-
tions can find it during the discovery process—that is, it must be in one of the
NDDS_DISCOVERY_PEERS lists.
23.1 Starting RTI Persistence Service
The script to run RTI Persistence Service’s executable is located in $NDDSHOME/scripts.
RTI Persistence Service v4.5c
Usage: rtipersistenceservice [options]
Options:
-cfgFile <file> Configuration file. This parameter is optional
since the configuration can be loaded from
other locations
-cfgName <name> Configuration name. This parameter is required
and it is used to find a <persistence_service>
matching tag in the configuration files
-appName <name> Application name
Used to name the DDS domain participants
Default: -cfgName
-domainId <int> DDS domain ID for the domain participants
created by the service
Default: Use XML value
-restore <0|1> Indicates whether or not persistence service
must restore its state from the persistent
storage
Default: Use XML value
Chapter 23
23-2
-verbosity [0-6] RTI Persistence Service verbosity
* 0 - silent
* 1 - exceptions (DDS and service)
* 2 - warnings (service)
* 3 - information (service)
* 4 - warnings (DDS and service)
* 5 - tracing (service)
* 6 - tracing (DDS and service)
Default: 1 (exceptions)
-version Prints the RTI Persistence Service version
-licenseFile <file> License file. This parameter is optional
-help Displays this information
Note: -cfgName is required.
The command-line options are described in Table 23.1.
23.2 Stopping RTI Persistence Service
To stop RTI Persistence Service: press Ctrl-C. RTI Persistence Service will close all files
and perform a clean shutdown.
Table 23.1 Command-Line Options
Command-line Option Description
-appName <string>
Assigns an application name to the DomainParticipants created by RTI
Persistence Service.
The participant name format is as follows:
RTI Persistence Service: <appName>: <participant-
Name>(<pub|sub>)
Default: -cfgName value
-cfgFile <string>
Specifies an XML configuration file for the persistence service.
The parameter is optional since the persistence service configuration
can be loaded from other locations. See Section 22.1 for further details.
23.2 Stopping RTI Persistence Service
23-3
23. Running RTI
Persistence Service
-cfgName <string>
Required.
Selects a persistence service configuration.
The same configuration files can be used to configure multiple persis-
tence services. Each persistence service will load its configuration
from a different <persistence_service> tag based on the name speci-
fied with this option.
f it is not specified, RTI Persistence Service will print the list of available
configurations and then exit.
-domainId
Sets the domain ID for the DomainParticipants created by RTI Persis-
tence Service.
If this option is not specified, the value in the <participant> XML tag
(see Table 22.6 on page 22-12) is used.
-help
Prints the RTI Persistence Service version and list of command-line
options.
-licenseFile <file>
Specifies the license file (path and filename). Only applicable to
licensed versions of RTI Persistence Service.
If not specified, RTI Persistence Service looks for the license as
described in the RTI Persistence Service Installation Guide.
-restore < 0|1>
Indicates whether or not RTI Persistence Service must restore its state
from the persistent storage. 0 = do not restore; 1 = do restore.
If this option is not specified, the corresponding XML value in the
<persistent_storage> tag (see Table 22.3 on page 22-10) is used.
-verbosity
RTI Persistence Service verbosity:
0 - No verbosity
1 - Exceptions (DDS and RTI Persistence Service) (default)
2 - Warning (RTI Persistence Service)
3 - Information (RTI Persistence Service)
4 - Warning (DDS and RTI Persistence Service)
5 - Tracing (RTI Persistence Service)
6 - Tracing (DDS and RTI Persistence Service)
Each verbosity level, n, includes all the verbosity levels smaller than n.
-version Prints the RTI Persistence Service version.
Table 23.1 Command-Line Options
Command-line Option Description

Chapter 23
23-4

Part 6: RTI CORBA Compatibility Kit
The material in this part of the manual is only relevant if you have purchased RTI
CORBA Compatibility Kit, an optional package that allows RTI Data Distribution Service’s
code generator, rtiddsgen, to output type-specific code that is compatible with OCI’s dis-
tribution of TAO and the JacORB distribution.
❏ Chapter 24: Introduction to RTI CORBA Compatibility Kit
❏ Chapter 25: Generating CORBA-Compatible Code with rtiddsgen
❏ Chapter 26: Supported IDL Types

Part 6. RTI CORBA Compatibility Kit

24-1
24. Introduction to
RTI CORBA
Compatibility Kit
Chapter 24 Introduction to RTI CORBA
Compatibility Kit
RTI CORBA Compatibility Kit is an optional package that allows RTI Data Distribution
Service’s code generator, rtiddsgen, to output type-specific code that is compatible with
OCI’s or DOC’s distribution of TAO and the JacORB distribution.
By having compatible data types, your applications can use CORBA and RTI Data Distri-
bution Service APIs, with no type conversions required.
For more information about OCI's or DOC’s distribution of TAO and JacORB, please
refer to the documentation included with those distributions. Additional information
can be found on OCI’s TAO website (www.theaceorb.com), DOC’s TAO website (http:/
/www.dre.vanderbilt.edu), and JacORB’s website (www.jacorb.org). TAO and JacOrb
distributions that are compatible with this version of RTI Data Distribution Service are
available from the RTI Customer Portal, accessible from www.rti.com/support.
In addition to this document, a simple example is available.
❏ C++ using TAO:
• See the example in <RTI_Data_Distribution_Service_INSTALL_ROOT>/
example/CPP/corba. Please read Instructions.pdf.
❏ Java using JacORB:
• See the example in <RTI_Data_Distribution_Service_INSTALL_ROOT>/
example/JAVA/corba. Please read Instructions.pdf.

Chapter 24
24-2
The following figure shows the process of using common IDL files and types for both
CORBA and DDS.
RTI CORBA Compatibility Kit is designed to be installed on top of RTI Data Distribution
Service; this kit replaces the default version of RTI Data Distribution Service’s code gener-
ation tool, rtiddsgen. The replacement rtiddsgen includes support for the command-line
option, -corba.
On the wire, the serialized version of the code for types generated using the -corba
option is identical to the serialized version of the code for types generated without the
option. As result, endpoints (DataReaders or DataWriters) using type support code gener-
ated with -corba can fully communicate with endpoints using type support code gener-
ated without -corba.

25-1
25. Generating
CORBA-Compatible
Code
Chapter 25 Generating CORBA-Compatible Code
with rtiddsgen
The RTI CORBA Compatibility Kit enables RTI Data Distribution Service’s IDL compiler,
rtiddsgen, to produce type-specific code that is compatible with OCI’s distribution of
TAO for C++ and with JacORB for Java.
When using rtiddsgen, specify the -corba option on the command line to generate com-
patible code. The -corba option enables the use of data structures for both CORBA and
DDS API calls without requiring any translation: the IDL-to-language mapping is the
same for both.
There are some trade-off’s to consider:
❏ While the -corba option provides the benefit of CORBA-compatible type-specific
code, it does not provide support for bitfields, pointers and ValueTypes.
❏ For complex types such as sequences and strings, the memory management is
different when the -corba option is used. When code is generated without the
option, the memory needed for the type is pre-allocated at system initialization.
When code is generated with the option, the memory is allocated when it is
needed, so memory allocation system calls may occur while the system is in
steady state.
❏ Without the -corba option, access to data fields within types may be faster under
some circumstances. CORBA-compatible types require the use of accessor meth-
ods. When -corba is not used, while the accessor methods are provided for con-
venience but they can be bypassed and the data can be accessed directly. This
direct access is available to the user as well as to the DDS middleware internal
implementation code. As a result, depending on the complexity of the types
used, overall system latency could be lower when using non-compatible types
(that is, when -corba is not used).

Chapter 25
25-2
The following sections describe how to use the RTI CORBA Compatibility Kit. In addition
to these instructions, a simple example is available.
❏ C++ using TAO:
• Generating C++ Code (Section 25.1)
• See the example in <RTI_Data_Distribution_Service_INSTALL_ROOT>/
example/CPP/corba. Please read Instructions.pdf.
❏ Java using JacORB:
• Generating Java Code (Section 25.2)
• See the example in <RTI_Data_Distribution_Service_INSTALL_ROOT>/
example/JAVA/corba. Please read Instructions.pdf.
25.1 Generating C++ Code
To generate CORBA-compatible type-specific code, first run TAO’s code generator,
tao_idl, on the IDL file containing your data types. If you followed the TAO distribution
compilation instructions contained in this document, the tao_idl compiler executable
will be in the TAO install directory under <ACE_ROOT>/bin.
<ACE_ROOT>/bin/tao_idl <IDL file name>.idl
This will generate CORBA support files for your data types. The generated file will have
a name matching the pattern <IDL file name>C.h and will contain the type definitions.
Pass this header file as a parameter to rtiddsgen to generate the DDS support code for the
data types.
rtiddsgen -language C++ -corba <IDL file name>C.h -example \
<architecture> <IDL file name>.idl
The optional -example <architecture> flag will generate code for a DDS publisher and a
DDS subscriber. It will also generate an .mpc file (and an .mwc file for Windows) that
can be used with TAO's Makefile, Project and Workspace Creator (MPC) to generate a
makefile or a Visual Studio project file for your DDS-CORBA application. The .mpc file
is meant to work out-of-the-box with the DDS-CORBA C++ Message example only, so
you will have to modify it to compile your custom application. Please refer to the DDS-
CORBA C++ example for more information about using MPC (see Instructions.pdf).

25.2 Generating Java Code
25-3
25. Generating
CORBA-Compatible
Code
25.2 Generating Java Code
To generate Java CORBA-compatible type specific code, first run the JacORB code gen-
erator on the IDL file containing your data types.
<JacORB install dir>/bin/idl <IDL file name>.idl
After generating the CORBA code for the IDL types run rtiddsgen as follows:
rtiddsgen -language Java -corba -example <architecture> \
<IDL file name>.idl
The optional -example <architecture> flag will generate code for a DDS publisher and
a DDS subscriber. It will also generate a makefile specific to your architecture that can
be used to compile the example using the publisher and subscriber code generated.
To form a complete code set, use the type class generated by the CORBA IDL compiler
and the files generated by rtiddsgen.

Chapter 25
25-4

26-1
26. Supported IDL
Types
Chapter 26 Supported IDL Types
Table 26.1 lists the IDL types supported when using the –corba option.
Table 26.1 Supported IDL Types when Using rtiddsgen -corba
IDL Construct Support
Modules Supported
Interfaces Ignored
Constants Supported
Basic Data Types Supported
Enums Supported
String Types Supported
Wide String Types Supported
Struct Types
Supported
Note: In-line nested structures are not supported (whether using -corba or
not). See Note 1.
Fixed Types Ignored
Union Types Supported
Sequence Types
Supported
Note: Sequences of anonymous sequences are not supported. See Note 2.
Array Types Supported
Typedefs Supported
Any
Not Supported.
Note that rtiddsgen does not ignore them. This construct cannot be in the
IDL file.
Value Types Ignored

Chapter 26
26-2
❏ Note 1
Inline nested structures, such as the following example, are not supported.
struct Outer {
short outer_short;
struct Inner {
char inner_char;
short inner_short;
} outer_nested_inner;
};
❏ Note 2
Sequences of anonymous Sequences are not supported. This kind of type will be
banned in future revisions of CORBA. For example, the following is not sup-
ported:
sequence<sequence<short,4>,4> MySequence;
Instead, sequences of sequences can be supported using typedef definitions. For
example, this is supported:
typedef sequence<short,4> MyShortSequence;
sequence<MyShortSequence,4> MySequence;
Exception Types Ignored
Type Code
Supported.
With DDS, DDS type codes should be used.
With CORBA, CORBA type codes should be used.
Table 26.1 Supported IDL Types when Using rtiddsgen -corba
IDL Construct Support

Part 7: RTI RTSJ Extension Kit
The material in this part of the manual is only relevant if you have purchased RTI RTSJ
Extension Kit, an optional package that allows you to configure RTI Data Distribution Ser-
vice applications to use Real-Time Specification for Java (RTSJ)-specific thread types and
memory areas.
❏ Chapter 27: Introduction to RTI RTSJ Extension Kit
❏ Chapter 28: Using RTI RTSJ Extension Kit

Part 7. RTI RTSJ Extension Kit

27-1
27. Introduction to
RTI RTSJ Extension Kit
Chapter 27 Introduction to RTI RTSJ Extension Kit
The RTI RTSJ Extension Kit is an optional package that allows you to configure RTI Data
Distribution Service applications to use Real-Time Specification for Java (RTSJ)-specific
thread types and memory areas. In particular, the threads used by RTI Data Distribution
Service can be configured so that they are never interrupted by a Java virtual machine’s
garbage collector—greatly improving the application’s determinism.
For more information on RTSJ, please refer to the documentation available on the offi-
cial web site: www.rtsj.org.
Additional documentation for the RTI RTSJ Extension Kit is available in the online docu-
mentation: <RTI_Data_Distribution_Service_INSTALL_ROOT>/ReadMe.html.
A simple example is also available:
<RTI_Data_Distribution_Service_INSTALL_ROOT>/example/JAVA/rtsj. Please read
Instructions.pdf.

Chapter 27
27-2

28-1
28. Using RTI RTSJ
Extension Kit
Chapter 28 Using RTI RTSJ Extension Kit
The kit includes a JAR file and associated electronic documentation, including API doc-
umentation in HTML and PDF formats and example code. The JAR file is provided in
two versions, release and debug, named nddsrtsj.jar and nddsrtsjd.jar, respectively.
These must be used in addition to the libraries provided with RTI Data Distribution Ser-
vice itself. If you are using the RTI Data Distribution Service release JAR, we recommend
that you also use the RTSJ release JAR, and likewise for the debug JAR, although this is
not a requirement.
Detailed API documentation is available in HTML format, accessible here:
<RTI_Data_Distribution_Service_INSTALL_ROOT>/ReadMe.html.
A simple example is also available here:
<RTI_Data_Distribution_Service_INSTALL_ROOT>/example/JAVA/rtsj.
Please read Instructions.pdf.

Chapter 28
28-2

Part 8: RTI TCP Transport
RTI TCP Transport is only available on specific architectures. See the Platform Notes for
details.
Out of the box, RTI Data Distribution Service uses the UDPv4 and Shared Memory trans-
port to communicate with other DDS applications. This configuration is appropriate for
systems running within a single LAN. However, using UDPv4 introduces some prob-
lems when DDS applications in different LANs need to communicate:
❏ UDPv4 traffic is usually filtered out by the LAN firewalls for security reasons.
❏ Forwarded ports are usually TCP ports.
❏ Each LAN may run in its own private IP address space and use NAT (Network
Address Translation) to communicate with other networks.
RTI TCP Transport enables participant discovery and data exchange using the TCP pro-
tocol (either on a local LAN, or over the public WAN). RTI TCP Transport allows RTI
Data Distribution Service to address the challenges of using TCP as a low-level communi-
cation mechanism between peers and limits the number of ports exposed to one. (When
using the default UDP transport, an RTI Data Distribution Service application uses multi-
ple UDP ports for communication, which may make it unsuitable for deployment across
firewalled networks).
This part of the User’s Manual contains the following chapter:
❏ Chapter 29: Configuring the RTI TCP Transport

Part 4. RTI Secure WAN Transport

29-1
29. TCP Transport
Chapter 29 Configuring the RTI TCP Transport
This chapter explains how to use and configure the RTI TCP Transport:
❏ TCP Communication Scenarios (Section 29.1)
❏ Configuring the RTI TCP Transport (Section 29.2)
29.1 TCP Communication Scenarios
RTI TCP Transport can be used to address multiple communication scenarios that go
from simple communication within a single LAN to complex communication scenarios
across LANs where NATs and firewalls may be involved. This section describes these
scenarios:
❏ Communication Within a Single LAN (Section 29.1.1)
❏ Symmetric Communication Across NATs (Section 29.1.2)
❏ Asymmetric Communication Across NATs (Section 29.1.3)
29.1.1 Communication Within a Single LAN
RTI TCP Transport can be used as an alternative to UDPv4 to communicate DDS
applications running inside the same LAN. Figure 29.1 shows how to configure the TCP
transport in this scenario.
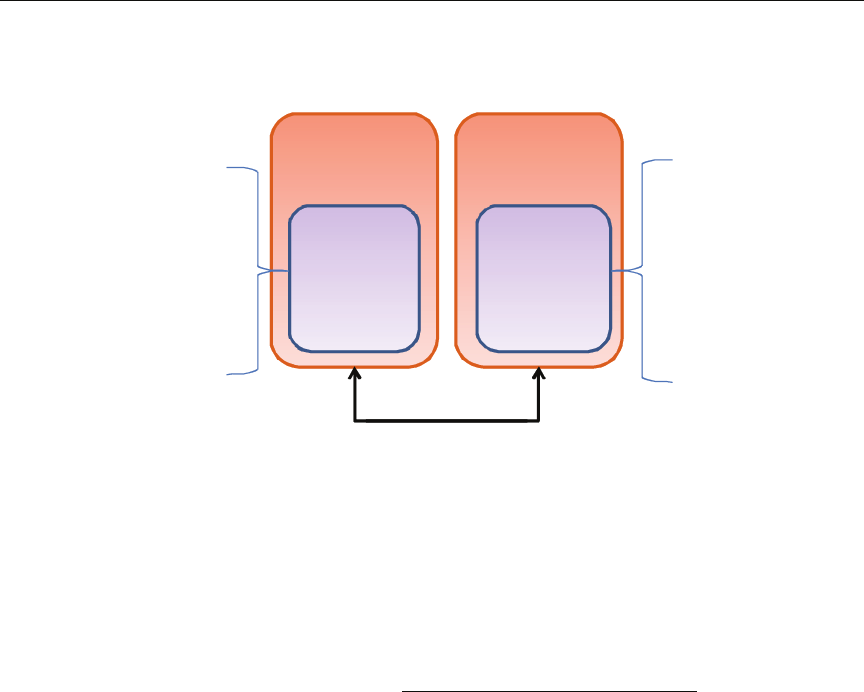
Chapter 29
29-2
parent.classid and server_bind_port are transport properties configured using the Prop-
ertyQosPolicy of the participant. (Note: When the TCP transport is instantiated,
by default it is configured to work in a LAN environment using symmetric com-
munication and binding to port 7400 for incoming connections.) For additional
information about these properties, see Table 29.1 on page 29-11.
Initial Peers represents the peers to which the participant will be announced to. Usu-
ally, these peers are configured using the DiscoveryQosPolicy of the participant or
the environment variable NDDS_DISCOVERY_PEERS. For information on the
format of initial peers, see Section 29.2.1.
Note: Unlike the UDPv4 transport, you must specify the initial peers, because multicast
cannot be used with TCP.
29.1.2 Symmetric Communication Across NATs
In NAT communication scenarios, each one of the LANs has a private IP address space.
The communication with other LANs is done through NAT routers that translate pri-
vate IP addresses and ports into public IP addresses and ports.
In symmetric communication scenarios, any RTI Data Distribution Service application
can initiate TCP connections with other applications. Figure 29.2 shows how to config-
ure the TCP transport in this scenario.
Figure 29.1 Communication within a Single LAN
TCPv4
Transport
IP address:
192.168.1.55
RTI Data Distribution
Service
Participant 1
parent.classid:
NDDS_TRANSPORT_
CLASSID_TCPV4_LAN
server_bind_port: 7400
Initial peers:
192.168.1.44:7400
parent.classid:
NDDS_TRANSPORT_
CLASSID_TCPV4_LAN
server_bind_port: 7400
Initial peers:
192.168.1.55:7400
TCPv4
Transport
IP address:
192.168.1.44
RTI Data Distribution
Service
Participant 2
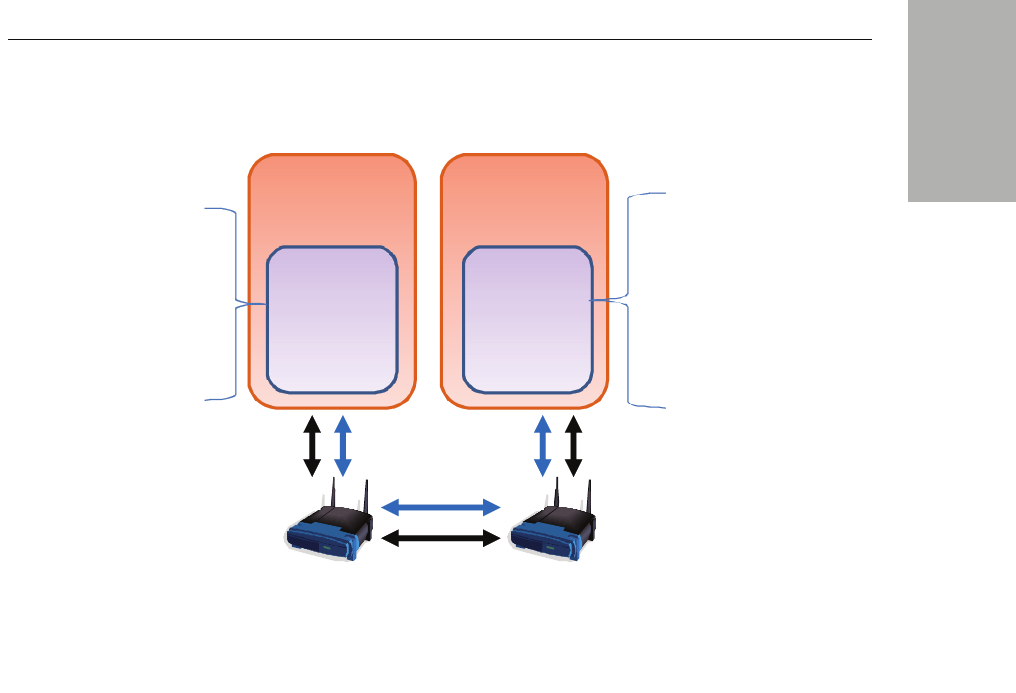
29.1 TCP Communication Scenarios
29-3
29. TCP Transport
Notice that initial peers refer to the public address of the remote LAN where the RTI
Data Distribution Service application is deployed and not the private address of the node
where the application is running. In addition, the transport associated with an RTI Data
Distribution Service instance will have to be configured with its public address
(public_address) so that this information can be propagated as part of the discovery
process.
Because the public address and port of the RTI Data Distribution Service instances must
be known before the communication is established, the NAT Routers will have to be
configured statically to translate (forward) the private server_bind_port into a public
port. This process is known as “static NAT“ or “port forwarding” and it allows traffic
originating in outer networks to reach designated peers in the LAN behind the NAT
router. You will need to refer to your router’s configuration manual to understand how
to correctly set up port forwarding.
Figure 29.2 Symmetric Communication Across NATs
TCPv4
Trans port
IP address:
192.168.1.55
RTI Data Distribution
Service
Participant 1
parent.classid:
NDDS_TRANSPORT_
CLASSID_TCPV4_WAN
server_bind_port: 7400
public_address: 155.99.25.11
Initial peers: 155.99.25.12:8500
parent.classid:
NDDS_TRANSPORT_
CLASSID_TCPV4_WAN
server_bind_port: 7400
public_address: 155.99.25.12
Initial peers: 155.99.25.11:8400
TCPv4
Transport
IP address:
192.168.1.44
RTI Data Distribution
Service
Participant 2
Connection
Data
NAT Router
WAN: 155.99.25.11
LAN: 192.168.1.0
Port forward settings:
WAN port 8400 TO 192.168.1.55:7400
NAT Router
WAN: 155.99.25.12
LAN: 192.168.1.0
Port forward settings:
WAN port 8500 TO 192.168.1.44:7400

Chapter 29
29-4
29.1.3 Asymmetric Communication Across NATs
This scenario is similar to the previous one, except in this case the TCP connections can
be initiated only by the RTI Data Distribution Service instance in LAN1. For security rea-
sons, incoming connections to LAN1 are not allowed. In this case, the peer in LAN1 is
considered ‘unreachable’. Unreachable peers can publish and subscribe just like any
other peer, but communication can occur only to a ‘reachable’ peer.
Figure 29.3 shows how to configure the TCP transport in this scenario. Notice that the
transport property server_bind_port is set to 0 to configure the node as unreachable.
In an asymmetric configuration, an unreachable peer (that is behind a firewall or NAT
without port forwarding) can still publish and subscribe like a reachable peer, but with
some important limitations:
❏ An unreachable peer can only communicate with reachable peers: two unreach-
able peers cannot establish a direct communication since they are both behind a
firewall and/or NAT.
Figure 29.3 Asymmetric Communication Across NATs
TCPv4
Transport
IP address:
192.168.1.55
RTI Data Distribution
Service
Participant 1
parent.classid:
NDDS_TRANSPORT_
CLASSID_TCPV4_WAN
server_bind_port: 0
public_address: invalid
Initial peers:
155.99.25.12:8500
parent.classid:
NDDS_TRANSPORT_
CLASSID_TCPV4_WAN
server_bind_port: 7400
public_address:
155.99.25.12:8500
TCPv4
Transport
IP address:
192.168.1.44
RTI Data Distribution
Service
Participant 2
Connection
Data
NAT Router
WAN: 155.99.25.11
LAN: 192.168.1.0
NAT Router
WAN: 155.99.25.12
LAN: 192.168.1.0
Port forward settings:
WAN port 8500 TO 192.168.1.44:7400

29.1 TCP Communication Scenarios
29-5
29. TCP Transport
Note that since RTI Data Distribution Service always relies on a direct connection
between peers (even if there is a third node that can be reachable by both
unreachable peers), communication can never occur between unreachable peers
.
For example, suppose Peers A and B are unreachable and Peer C is reachable.
Communication can take place between A and C, and between B and C, but not
between A and B. For this configuration, you should consider using RTI Routing
Service (available for purchase as a separate product).
❏ It can take longer to discover unreachable peers than reachable ones. This is
because a reachable peer has to wait for the unreachable peer to establish the
communication first.
For example, suppose Peer A (unreachable) starts before Peer B (reachable). The
discovery mechanism of A attempts to connect to the (not-yet existing) Peer B.
Since it fails, it will retry after n seconds. Right after that, B starts. If A would be
reachable (and in B’s peer list), the discovery mechanism will immediately con-
tact A. In this case, since A cannot be reached, B needs to wait until the discovery
process of A decides to retry.
This effect can be minimized by modifying the QoS that controls the discovery
mechanism used by A. In particular, you should set the DomainParticipant’s
DiscoveryConfig QoS policy’s min_initial_participant_announcement_period
to a small value.
Note that the concept of symmetric/asymmetric configuration is a local concept that
only describes the communication mechanism between two peers. A reachable peer can
be involved in symmetric communication with another reachable peer, and at the same
time have asymmetric communication with a unreachable peer. When a peer attempts
to communicate with a remote peer, it knows if the remote peer is reachable or not by
looking at the transport address provided.

Chapter 29
29-6
29.2 Configuring the RTI TCP Transport
RTI TCP Transport is distributed as a both shared and static library in <RTI Data Distri-
bution Service installation directory>/lib/<architecture>. The library is called
nddstransporttcp.
Mechanisms for Configuring the Transport:
❏ By explicitly instantiating a new transport (see Section 29.2.2) and then register-
ing it with the DomainParticipant (see Section 13.7). (Not available in the Java and
.NET APIs.)
❏ Through the Property QoS policy of the DomainParticipant (on UNIX, Solaris
and Windows systems only). This process is described in Section 29.2.3.
This section describes:
❏ Choosing a Transport Mode (Section 29.2.1)
❏ Explicitly Instantiating the TCP Transport Plugin (Section 29.2.2)
❏ Configuring the RTI TCP Transport with the Property QosPolicy (Section 29.2.3)
❏ Setting the Initial Peers (Section 29.2.4)
❏ TCP/TLS Transport Properties (Section 29.2.5)
29.2.1 Choosing a Transport Mode
When you configure the TCP transport, you must choose one of the following types of
communication:
❏ TCP over LAN — Communication between the two peers is not encrypted (data
is written directly to a TCP socket). Each node can use all the possible interfaces
available on that machine to receive connections. The node can only receive con-
nections from machines that are on a local LAN.
❏ TCP over WAN — Communication is not encrypted (data is written directly to a
TCP socket). The node can only receive connections from a specific port, which
must be configured in the public router of the local network (WAN mode).
❏ TLS over LAN — This is similar to the TCP over LAN, where the node can use
all the available network interfaces to TX/RX data (LAN nodes only), but in this
mode, the data being written on the physical socket is encrypted first (through
the openssl library). Performance (throughput and latency) may be less than
TCP over LAN since the data needs to be encrypted before going on the wire.

29.2 Configuring the RTI TCP Transport
29-7
29. TCP Transport
Discovery time may be longer with this mode because when the first connection
is established, the two peers exchange handshake information to ensure line pro-
tection. For more general information on TLS, see Section 19.3.
❏ TLS over WAN — The data is encrypted just like TLS over LAN, but it can be
sent and received only from a specific port of the router.
Note: To use either TLS mode, you also need
RTI TLS Support, which is available for
purchase as a separate package.
An instance of the transport can only communicate with other nodes that use the same
transport mode.
You can specify the transport mode in either the NDDS_Transport_TCPv4_Property_t
structure (see Section 29.2.1) or in the parent.classid field of the Properties QoS (see
Section 29.2.3). Your choice of transport mode will also be reflected in the prefix you use
for setting the initial peers (see Section 29.2.4).
29.2.2 Explicitly Instantiating the TCP Transport Plugin
As described on page 29-6, there are two ways to configure a transport plugin. This sec-
tion describes the way that includes explicitly instantiating and registering a new trans-
port. (The other way is to use the Property QoS mechanism, described in Section 29.2.3).
Notes:
❏ This way of instantiating a transport is not supported in the Java and .NET APIs.
If you are using Java or .NET, use the Property QoS mechanism described in
Section 29.2.3.
❏ To use this mechanism, there are extra libraries that you must link into your
program and an additional header file that you must include. Please see
Section 29.2.2.1 and Section 29.2.2.2 for details.
To instantiate a TCP transport:
1. Include the extra header file described in Section 29.2.2.1.
2. Instantiate a new transport by calling NDDS_Transport_TCPv4_new():
NDDS_Transport_Plugin* NDDS_Transport_TCPv4_new (
const struct NDDS_Transport_TCPv4_Property_t * property_in)
3. Register the transport by calling NDDSTransportSupport::register_transport().
See the online (HTML) documentation for details on these functions and the contents of
the NDDS_Transport_TCPv4_Property_t structure.

Chapter 29
29-8
29.2.2.1 Additional Header Files and Include Directories
To use the RTI TCP Transport API, you must include an extra header file (in addition to
those in Table 9.1, “Header Files to Include for RTI Data Distribution Service (All Archi-
tectures),” on page 9-2):
#include "ndds/transport_tcp/transport_tcp_tcpv4.h"
Since RTI TCP Transport is in the same directory as RTI Data Distribution Service (see
Table 9.2, “Include Paths for Compilation (All Architectures),” on page 9-3), no addi-
tional include paths need to be added for the RTI TCP Transport API. If this is not the
case, you will need to specify the appropriate include path.
29.2.2.2 Additional Libraries and Compiler Flags
To use the RTI TCP Transport, you must add the nddstransporttcp library to the link
phase of your application. There are four different kind of libraries, depending on if you
want a debug or release version, and static or dynamic linking with RTI Data Distribu-
tion Service.
For UNIX- based systems, the libraries are:
libnddstransporttcp.a — Release version, dynamic libraries
libnddstransporttcpd.a — Debug version, dynamic libraries
libnddstransporttcpz.a — Release version, static libraries
libnddstransporttcpzd.a — Debug version, static libraries
For Windows-based systems, the libraries are:
NDDSTRANSPORTTCP.LIB — Release version, dynamic libraries
NDDSTRANSPORTTCPD.LIB — Debug version, dynamic libraries
NDDSTRANSPORTTCPZ.LIB — Release version, static libraries
NDDSTRANSPORTTCPZD.LIB — Debug version, static libraries
Notes for using TLS:
To use either TLS mode (see Section 29.2.1), you also need RTI TLS Support, which is
available for purchase as a separate package. The TLS library (libnddstls.so or
NDDSTLS.LIB, depending on your platform) must be in your library search path
(LD_LIBRARY_PATH environment variable on UNIX/Solaris systems, or Path
environment variable on Windows systems).
If you already have $NDDSHOME/lib/<architecture> in your library search path,
no extra steps are needed to use TLS once RTI TLS Support is installed.
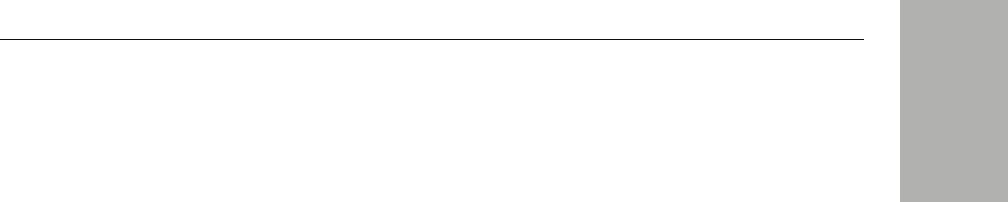
29.2 Configuring the RTI TCP Transport
29-9
29. TCP Transport
Even if you link everything statically, you must make sure that the location for
$NDDSHOME/lib/<architecture> (or wherever the TLS library is located) is in
your search path. The TLS library is loaded dynamically, even if you use static link-
ing for everything else.
Your search path must also include the location for the Openssl library, which is
used by the TLS library.
29.2.3 Configuring the RTI TCP Transport with the Property QosPolicy
The PROPERTY QosPolicy (DDS Extension) (Section 6.5.15) allows you to set up name/
value pairs of data and attach them to an entity, such as a DomainParticipant.
Like all QoS policies, there are two ways to specify the Property QoS policy:
❏ Programmatically, as described in this section and Section 4.1.7. This includes
using the add_property() operation to attach name/value pairs to the Property
QosPolicy and then configuring the DomainParticipant to use that QosPolicy (by
calling set_qos() or specifying QoS values when the DomainParticipant is cre-
ated).
❏ With an XML QoS Profile, as described in Chapter 15: Configuring QoS with
XML. This causes RTI Data Distribution Service to dynamically load the TCP
transport library at run time and then implicitly create and register the transport
plugin.
To add name/value pairs to the Property QoS policy, use the add_property() operation:
DDS_ReturnCode_t DDSPropertyQosPolicyHelper::add_property
(DDS_PropertyQosPolicy policy,
const char * name,
const char * value,
DDS_Boolean propagate)
For more information on add_property() and the other operations in the DDSProperty-
QosPolicyHelper class, see Table 6.48, “PropertyQoSPolicyHelper Operations,” on
page 6-139, as well as the online (HTML) documentation.
The ‘name’ part of the name/value pairs is a predefined string. The property names for
the RTI TCP Transport are described in Table 29.1, “Properties for
NDDS_Transport_TCPv4_Property_t,” on page 29-11.
Here are the basic steps, taken from the example Hello World application (for details,
please see the example application.)
1. Get the default DomainParticipant QoS from the DomainParticipantFactory.
DDSDomainParticipantFactory::get_instance()->get_default_participant_qos(
participant_qos);

Chapter 29
29-10
2. Disable the builtin transports.
participant_qos.transport_builtin.mask = DDS_TRANSPORTBUILTIN_MASK_NONE;
3. Set up the DomainParticipant’s Property QoS.
a. Load the plugin.
DDSPropertyQosPolicyHelper::add_property (participant_qos.property,
"dds.transport.load_plugins", "dds.transport.TCPv4.tcp1",
DDS_BOOLEAN_FALSE);
b. Specify the transport plugin library.
DDSPropertyQosPolicyHelper::add_property (participant_qos.property,
"dds.transport.TCPv4.tcp1.library", "nddstransporttcp",
DDS_BOOLEAN_FALSE);
c. Specify the transport’s ‘create’ function.
DDSPropertyQosPolicyHelper::add_property (participant_qos.property,
"dds.transport.TCPv4.tcp1.create_function",
"NDDS_Transport_TCPv4_create",
DDS_BOOLEAN_FALSE);
d. Set the transport to work in a WAN configuration with a public address:
DDSPropertyQosPolicyHelper::add_property (participant_qos.property,
"dds.transport.TCPv4.tcp1.parent.classid",
”NDDS_TRANSPORT_CLASSID_TCPV4_WAN”,
DDS_BOOLEAN_FALSE);
DDSPropertyQosPolicyHelper::add_property (participant_qos.property,
"dds.transport.TCPv4.public_address", "182.181.2.31",
DDS_BOOLEAN_FALSE);
e. Specify any other properties, as needed.
4. Create the DomainParticipant using the modified QoS.
participant = DDSTheParticipantFactory->create_participant (domainId,
participant_qos, NULL /* listener */, DDS_STATUS_MASK_NONE);
Important! Property changes should be made before the transport is loaded—either
before the DomainParticipant is enabled, before the first DataWriter/
DataReader is created, or before the builtin topic reader is looked up, which-
ever one happens first.

29.2 Configuring the RTI TCP Transport
29-11
29. TCP Transport
29.2.4 Setting the Initial Peers
Note: You must specify the initial peers (you cannot use the defaults because multicast
cannot be used with TCP).
For RTI TCP Transport, the addresses of the initial peers (NDDS_DISCOVERY_PEERS)
that will be contacted during the discovery process have the following format:
For WAN communication using TCP: tcpv4_wan://<IP address or hostname>:<port>
For WAN communication using TLS: tlsv4_wan://<IP address or hostname>:<port>
For LAN communication using TCP: tcpv4_lan://<IP address or hostname>:<port>
For LAN communication using TLS: tlsv4_lan://<IP address or hostname>:<port>
For example:
setenv NDDS_DISCOVERY_PEERS tcpv4_wan://10.10.1.165:7400,
tcpv4_wan://10.10.1.111:7400,tcpv4_lan://192.168.1.1:7500
When the TCP transport is configured for LAN communication (with the parent.classid
property), the IP address is the LAN address of the peer and the port is the server port
used by the transport (the server_bind_port property).
When the TCP transport is configured for WAN communication (with the parent.classid
property), the IP address is the WAN or public address of the peer and the port is the
public port that is used to forward traffic to the server port in the TCP transport.
29.2.5 TCP/TLS Transport Properties
Table 29.1 on page 29-11 describes the TCP and TLS transport properties.
Note: To use TLS, you also need RTI TLS Support, which is a separate package.
Table 29.1 Properties for NDDS_Transport_TCPv4_Property_t
Property Name
(prefix with
‘dds.transport.TCPv4.tcp1.’)
1
Description
dds.transport.load_plugins
(Note: this does not take a prefix)
Required
Comma-separated strings indicating the prefix names of all plugins that will be
loaded by RTI Data Distribution Service. For example: “dds.trans-
port.TCPv4.tcp1". You will use this string as the prefix to the property names.
See Footnote
1
.
Note: you can load up to 8 plugins.
library
Required Must be "nddstransporttcp".
This library needs to be in the path during run time for use by RTI Data Distri-
bution Service (in the LD_LIBRARY_PATH environment variable on UNIX sys-
tems, in PATH for Windows systems).

Chapter 29
29-12
create_function Required Must be “NDDS_Transport_TCPv4_create”.
aliases
Used to register the transport plugin returned by
NDDS_Transport_TCPv4_create() (as specified by
<TCP_prefix>.create_function) to the DomainParticipant. Aliases should be
specified as a comma-separated string, with each comma delimiting an alias.
Default: the transport prefix (see Footnote
1
)
parent.classid
Must be set to one of the following values:
NDDS_TRANSPORT_CLASSID_TCPV4_LAN
for TCP communication within a LAN
NDDS_TRANSPORT_CLASSID_TLSV4_LAN
for TLS communication within a LAN
NDDS_TRANSPORT_CLASSID_TCPV4_WAN
for TCP communication across LANs and firewalls
NDDS_TRANSPORT_CLASSID_TLSV4_WAN
for TLS communication across LAN and firewalls
Default: NDDS_TRANSPORT_CLASSID_TCPV4_LAN
Note: To use either TLS mode, you also need RTI TLS Support, which is
available for purchase as a separate package.
parent.gather_send_
buffer_count_max
Specifies the maximum number of buffers that RTI Data Distribution Service can
pass to the send() function of the transport plugin.
The transport plugin send() API supports a gather-send concept, where the
send() call can take several discontiguous buffers, assemble and send them in a
single message. This enables RTI Data Distribution Service to send a message
from parts obtained from different sources without first having to copy the
parts into a single contiguous buffer.
However, most transports that support a gather-send concept have an upper
limit on the number of buffers that can be gathered and sent. Setting this value
will prevent RTI Data Distribution Service from trying to gather too many buffers
into a send call for the transport plugin.
RTI Data Distribution Service requires all transport-plugin implementations to
support a gather-send of least a minimum number of buffers. This minimum
number is defined as
NDDS_TRANSPORT_PROPERTY_GATHER_SEND_BUFFER_COUNT_MIN.
Default: 128
Table 29.1 Properties for NDDS_Transport_TCPv4_Property_t
Property Name
(prefix with
‘dds.transport.TCPv4.tcp1.’)
1
Description
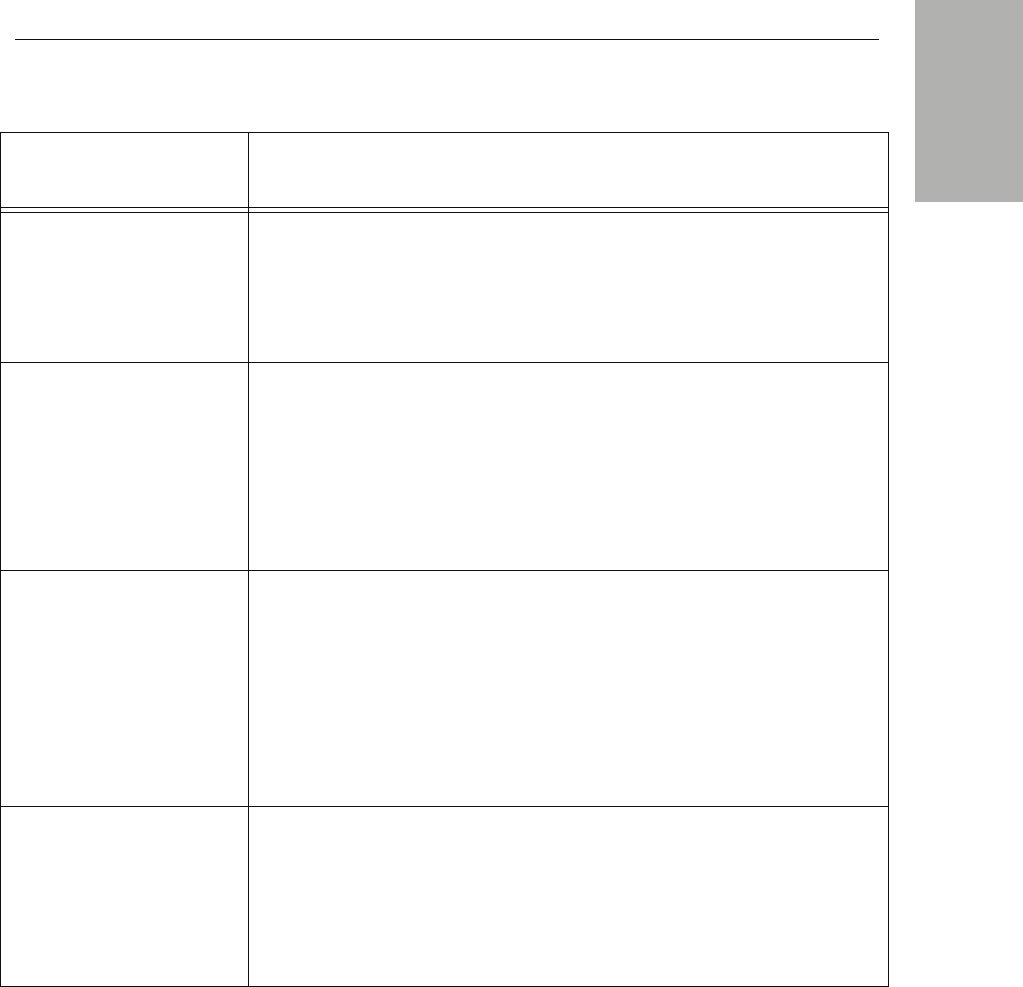
29.2 Configuring the RTI TCP Transport
29-13
29. TCP Transport
parent.message_size_max
The maximum size of a message in bytes that can be sent or received by the
transport plugin.
If you set this higher than the default, the DomainParticipant’s buffer_size (in the
RECEIVER_POOL QosPolicy (DDS Extension) (Section 8.5.7)) should also be
changed.
Default: 9216
parent.allow_interfaces_list
A list of strings, each identifying a range of interface addresses that can be used
by the transport.
Interfaces must be specified as comma-separated strings, with each comma
delimiting an interface.
For example: 10.10.*, 10.15.*
If the list is non-empty, this "white" list is applied before par-
ent.deny_interfaces_list.
Default: All available interfaces are used.
parent.deny_interfaces_list
A list of strings, each identifying a range of interface addresses that will not be
used by the transport.
If the list is non-empty, deny the use of these interfaces.
Interfaces must be specified as comma-separated strings, with each comma
delimiting an interface.
For example: 10.10.*
This "black" list is applied after parent.allow_interfaces_list and filters out the
interfaces that should not be used.
Default: No interfaces are denied
send_socket_buffer_size
Size in bytes of the send buffer of a socket used for sending. On most operating
systems, setsockopt() will be called to set the SENDBUF to the value of this
parameter.
This value must be greater than or equal to parent.message_size_max or -1.
The maximum value is operating system-dependent.
Default: -1 (setsockopt() (or equivalent) will not be called to size the send buffer
of the socket)
Table 29.1 Properties for NDDS_Transport_TCPv4_Property_t
Property Name
(prefix with
‘dds.transport.TCPv4.tcp1.’)
1
Description
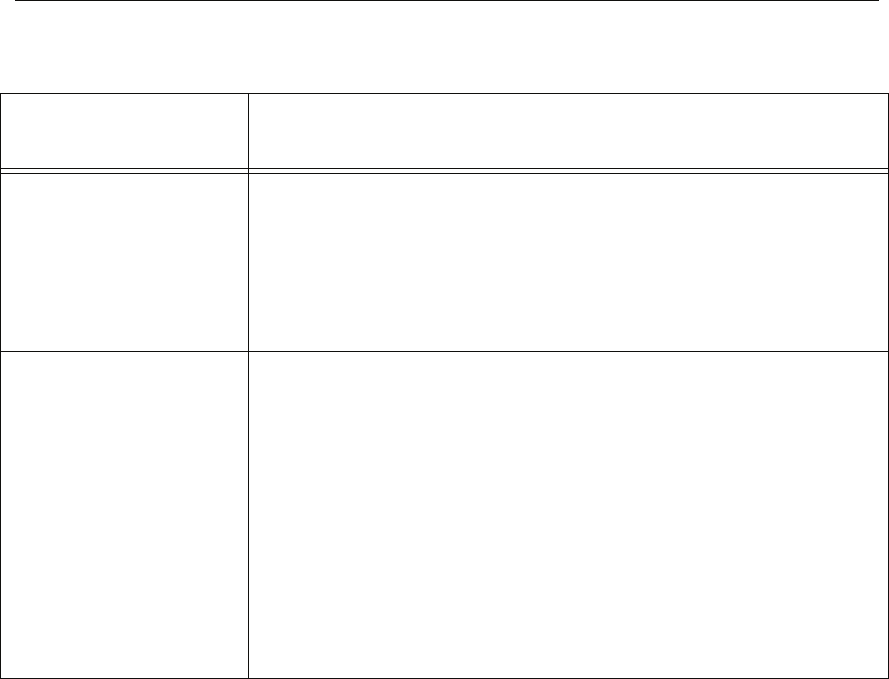
Chapter 29
29-14
recv_socket_buffer_size
Size, in bytes, of the receive buffer of a socket used for receiving.
On most operating systems, setsockopt() will be called to set the RECVBUF to
the value of this parameter.
This value must be greater than or equal to parent.message_size_max or -1. The
maximum value is operating-system dependent.
Default: -1 (setsockopt() (or equivalent) will not be called to size the receive buf-
fer of the socket)
ignore_loopback_interface
Prevents the transport plugin from using the IP loopback interface.
This property is ignored when parent.classid is
NDDS_TRANSPORT_CLASSID_TCPV4_WAN or
NDDS_TRANSPORT_CLASSID_TLSV4_WAN.
Two values are allowed:
0: Enable local traffic via this plugin. The plugin will only use and report the IP
loopback interface only if there are no other network interfaces (NICs) up
on the system.
1: Disable local traffic via this plugin. This means “do not use the IP loopback
interface, even if no NICs are discovered.” This setting is useful when you
want applications running on the same node to use a more efficient plugin
like shared memory instead of the IP loopback.
Default: 1
Table 29.1 Properties for NDDS_Transport_TCPv4_Property_t
Property Name
(prefix with
‘dds.transport.TCPv4.tcp1.’)
1
Description

29.2 Configuring the RTI TCP Transport
29-15
29. TCP Transport
ignore_
nonrunning_interfaces
Prevents the transport plugin from using a network interface that is not
reported as RUNNING by the operating system.
The transport checks the flags reported by the operating system for each net-
work interface upon initialization. An interface which is not reported as UP will
not be used. This property allows the same check to be extended to the
IFF_RUNNING flag implemented by some operating systems. The RUNNING
flag is defined to mean that "all resources are allocated" and may be off if no link
is detected (e.g., the network cable is unplugged).
Two values are allowed:
0: Do not check the RUNNING flag when enumerating interfaces, just make
sure the interface is UP.
1: Check the flag when enumerating interfaces, and ignore those that are not
reported as RUNNING. This can be used on some operating systems to
cause the transport to ignore interfaces that are enabled but not connected to
the network.
Default: 1
transport_priority_mask
Mask for the transport priority field. This is used in conjunction with
transport_priority_ mapping_low/transport_priority_ mapping_high to define
the mapping from DDS transport priority to the IPv4 TOS field. Defines a con-
tiguous region of bits in the 32-bit transport priority value that is used to gener-
ate values for the IPv4 TOS field on an outgoing socket.
For example, the value 0x0000ff00 causes bits 9-16 (8 bits) to be used in the map-
ping. The value will be scaled from the mask range (0x0000 -0xff00 in this case)
to the range specified by low and high.
If the mask is set to zero, then the transport will not set IPv4 TOS for send sock-
ets.
Default: 0
transport_priority_
mapping_low
Sets the low and high values of the output range to IPv4 TOS.
These values are used in conjunction with transport_priority_mask to define the
mapping from DDS transport priority to the IPv4 TOS field. Defines the low
and high values of the output range for scaling.
Note that IPv4 TOS is generally an 8-bit value.
Default transport_priority_mapping_low: 0
Default transport_priority_mapping_high: 0xFF
transport_priority_
mapping_high
Table 29.1 Properties for NDDS_Transport_TCPv4_Property_t
Property Name
(prefix with
‘dds.transport.TCPv4.tcp1.’)
1
Description

Chapter 29
29-16
server_socket_backlog
The backlog parameter determines what is the maximum length of the queue of
pending connections.
Default: 5
public_address
Required for WAN communication (see note below)
Public IP address and port (WAN address and port) (separated with ‘:’ ) associ-
ated with the transport instantiation.
For example: 10.10.9.10:4567
This field is used only when parent.classid is
NDDS_TRANSPORT_CLASSID_TCPV4_WAN or
NDDS_TRANSPORT_CLASSID_TLSV4_WAN.
The public address and port are necessary to support communication over
WAN that involves Network Address Translators (NATs). Typically, the address
is the public address of the IP router that provides access to the WAN. The port
is the IP router port that is used to reach the private server_bind_port inside the
LAN from the outside. This value is expressed as a string in the form: ip[:port],
where ip represents the IPv4 address and port is the external port number of the
router.
Host names are not allowed in the public_address because they may resolve to
an internet address that is not what you want (i.e., ‘localhost’ may map to your
local IP or to 127.0.0.1).
Note: If you are using an asymmetric configuration, public_address does not
have to be set for the non-public peer.
server_bind_port
Private IP port (inside the LAN) used by the transport to accept TCP connec-
tions.
If this property is set to zero, the transport will disable the internal server
socket, making it impossible for external peers to connect to this node. In this
case, the node is considered unreachable and will communicate only using the
asymmetric mode with other (reachable) peers.
For WAN communication, this port must be forwarded to a public port in the
NAT-enabled router that connects to the outer network.
Default: 7400
Table 29.1 Properties for NDDS_Transport_TCPv4_Property_t
Property Name
(prefix with
‘dds.transport.TCPv4.tcp1.’)
1
Description

29.2 Configuring the RTI TCP Transport
29-17
29. TCP Transport
read_buffer_allocation
Allocation settings applied to read buffers.
These settings configure the initial number of buffers, the maximum number of
buffers and the buffers to be allocated when more buffers are needed.
Default:
❏ read_buffer_allocation.initial_count = 2
❏ read_buffer_allocation.max_count = -1 (unlimited)
❏ read_buffer_allocation.incremental_count = -1 (number of buffers will
keep doubling on each allocation until it reaches max_count)
write_buffer_allocation
Allocation settings applied to buffers used for asynchronous (non-blocking)
write.
These settings configure the initial number of buffers, the maximum number of
buffers and the buffers to be allocated when more buffers are needed.
Default:
❏ write_buffer_allocation.initial_count = 4
❏ write_buffer_allocation.max_count = 1000
❏ write_buffer_allocation.incremental_count = 10
Note that for the write buffer pool, the max_count is not set to unlimited. This is
to avoid having a fast writer quickly exhaust all the available system memory,
in case of a temporary network slowdown. When this write buffer pool reaches
the maximum, the low-level send command of the transport will fail; at that
point RTI Data Distribution Service will take the appropriate action (retry to send
or drop it), according to the application’s QoS (if the transport is used for reli-
able communication, the data will still be sent eventually).
control_buffer_allocation
Allocation settings applied to buffers used to serialize and send control mes-
sages.
These settings configure the initial number of buffers, the maximum number of
buffers and the buffers to be allocated when more buffers are needed.
Default:
❏ control_buffer_allocation.initial_count = 2
❏ control_buffer_allocation.max_count = -1 (unlimited)
❏ control_buffer_allocation.incremental_count = -1 (number of buffers
will keep doubling on each allocation until it reaches max_count)
Table 29.1 Properties for NDDS_Transport_TCPv4_Property_t
Property Name
(prefix with
‘dds.transport.TCPv4.tcp1.’)
1
Description
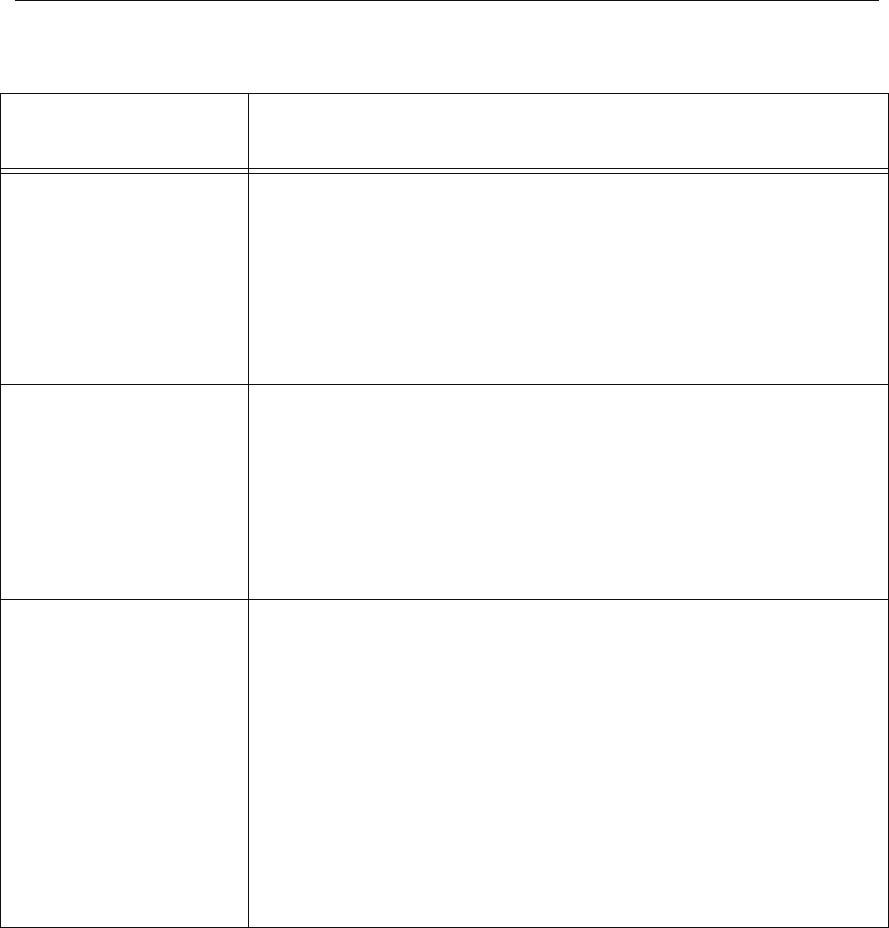
Chapter 29
29-18
control_message_allocation
Allocation settings applied to control messages.
These settings configure the initial number of messages, the maximum number
of messages and the messages to be allocated when more messages are needed.
Default:
❏ control_message_allocation.initial_count = 2
❏ control_message_allocation.max_count = -1 (unlimited)
❏ control_message_allocation.incremental_count = -1 (number of mes-
sages will keep doubling on each allocation until it reaches max_count)
control_attribute_allocation
Allocation settings applied to control messages attributes.
These settings configure the initial number of attributes, the maximum number
of attributes and the attributes to be allocated when more attributes are needed.
Default:
❏ control_attribute_allocation.initial_count = 2
❏ control_attribute_allocation.max_count = -1 (unlimited)
❏ control_attribute_allocation.incremental_count = -1 (number of attri-
butes will keep doubling on each allocation until it reaches max_count)
force_asynchronous_send
Forces asynchronous send. When this parameter is set to 0, the TCP transport
will attempt to send data as soon as the internal send() function is called. When
it is set to 1, the transport will make a copy of the data to send and enqueue it in
an internal send buffer. Data will be sent as soon as the low-level socket buffer
has space.
Normally setting it to 1 delivers better throughput in a fast network, but will
result in a longer time to recover from various TCP error conditions. Setting it to
0 may cause the low-level send() function to block until the data is physically
delivered to the lower socket buffer. For an application writing data at a very
fast rate, it may cause the caller thread to block if the send socket buffer is full.
This could produce lower throughput in those conditions (the caller thread
could prepare the next packet while waiting for the send socket buffer to
become available).
Default: 0
Table 29.1 Properties for NDDS_Transport_TCPv4_Property_t
Property Name
(prefix with
‘dds.transport.TCPv4.tcp1.’)
1
Description

29.2 Configuring the RTI TCP Transport
29-19
29. TCP Transport
max_packet_size
The maximum size of a TCP segment.
This parameter is only supported on Linux architectures.
By default, the maximum size of a TCP segment is based on the network MTU
for destinations on a local network, or on a default 576 for destinations on non-
local networks. This behavior can be changed by setting this parameter to a
value between 1 and 65535.
Default: -1 (default behavior)
enable_keep_alive
Configures the sending of KEEP_ALIVE messages in TCP.
Setting this value to 1, causes a KEEP_ALIVE packet to be sent to the remote
peer if a long time passes with no other data sent or received.
This feature is implemented only on architectures that provide a low-level
implementation of the TCP keep-alive feature.
On Windows systems, the TCP keep-alive feature can be globally enabled
through the system’s registry: \HKEY_LOCAL_MACHINE\SYSTEM\
CurrentControlSet\Tcpip\Parameters.
Refer to MSDN documentation for more details.
On Solaris systems, most of the TCP keep-alive parameters can be changed
though the kernel properties.
Default: 0
keep_alive_time
Specifies the interval of inactivity in seconds that causes TCP to generate a
KEEP_ALIVE message.
This parameter is only supported on Linux architectures.
Default: -1 (OS default value)
keep_alive_interval
Specifies the interval in seconds between KEEP_ALIVE retries.
This parameter is only supported on Linux architectures.
Default: -1 (OS default value)
keep_alive_retry_count
The maximum number of KEEP_ALIVE retries before dropping the connection.
This parameter is only supported on Linux architectures.
Default: -1 (OS default value)
disable_nagle
Disables the TCP nagle algorithm.
When this property is set to 1, TCP segments are always sent as soon as possi-
ble, which may result in poor network utilization.
Default: 0
Table 29.1 Properties for NDDS_Transport_TCPv4_Property_t
Property Name
(prefix with
‘dds.transport.TCPv4.tcp1.’)
1
Description

Chapter 29
29-20
logging_verbosity_bitmap
Bitmap that specifies the verbosity of log messages from the transport.
Logging values:
❏ -1 (0xffffffff): do not change the current verbosity
❏ 0x00: silence
❏ 0x01: errors
❏ 0x02: warnings
❏ 0x04: local
❏ 0x08: remote
❏ 0x10: period
❏ 0x80: other (used for control protocol tracing)
Default: -1
Note: the logging verbosity is a global property shared across multiple instances
of the TCP transport. If you create a new TCP Transport instance with
logging_verbosity_bitmap different than -1, the change will affect all the other
instances as well.
The default TCP transport verbosity is errors and warnings.
Note: The option of 0x80 (other) is used only for tracing the internal control pro-
tocol. Since the output is very verbose, this feature is enabled only in the debug
version of the TCP Transport library
(libnddstransporttcpd.so / LIBNDDSTRANSPORTD.LIB).
outstanding_connection_
cookies
Maximum number of outstanding connection cookies allowed by the transport
when acting as server.
A connection cookie is a token provided by a server to a client; it is used to
establish a data connection. Until the data connection is established, the cookie
cannot be reused by the server.
To avoid wasting memory, it is good practice to set a cap to the maximum num-
ber of connection cookies (pending connections).
When the maximum value is reached, a client will not be able to connect to the
server until new cookies become available.
Range: 1 or higher, or -1 (which means an unlimited number).
Default: 100
Table 29.1 Properties for NDDS_Transport_TCPv4_Property_t
Property Name
(prefix with
‘dds.transport.TCPv4.tcp1.’)
1
Description

29.2 Configuring the RTI TCP Transport
29-21
29. TCP Transport
outstanding_connection_
cookies_life_span
Maximum lifespan (in seconds) of the cookies associated with pending connec-
tions.
If a client does not connect to the server before the lifespan of its cookie expires,
it will have to request a new cookie.
Range: 1 second or higher, or -1
Default : -1, which means an unlimited amount of time (effectively disabling the
feature).
tls.verify.
ca_file
A string that specifies the name of file containing Certificate Authority certifi-
cates. File should be in PEM format. See the OpenSSL manual page for
SSL_load_verify_locations for more information.
To enable TLS, ca_file or ca_path is required; both may be specified (at least
one is required).
tls.verify.
ca_path
A string that specifies paths to directories containing Certificate Authority cer-
tificates. Files should be in PEM format and follow the OpenSSL-required nam-
ing conventions. See the OpenSSL manual page for
SSL_CTX_load_verify_locations for more information.
To enable TLS, ca_file or ca_path is required; both may be specified (at least
one is required).
tls.verify.verify_depth Maximum certificate chain length for verification.
tls.verify.
crl_file
Name of the file containing the Certificate Revocation List.
File should be in PEM format.
Table 29.1 Properties for NDDS_Transport_TCPv4_Property_t
Property Name
(prefix with
‘dds.transport.TCPv4.tcp1.’)
1
Description

Chapter 29
29-22
tls.identity.
certificate_chain
String containing an identifying certificate (in PEM format) or certificate chain
(appending intermediate CA certs in order).
An identifying certificate is required for secure communication. The string
must be sorted starting with the certificate to the highest level (root CA). If this
is specified, certificate_chain_file must be empty.
tls.identity.
certificate_chain_file
File containing identifying certificate (in PEM format) or certificate chain
(appending intermediate CA certs in order).
An identifying certificate is required for secure communication. The file must
be sorted starting with the certificate to the highest level (root CA). If this is
specified, certificate_chain must be empty.
Optionally, a private key may be appended to this file. If no private key option
is specified, this file will be used to load a private key.
tls.identity.
private_key_password
A string that specifies the password for private key.
tls.identity.
private_key
String containing private key (in PEM format).
At most one of private_key and private_key_file may be specified. If no private
key is specified (all values are NULL), the private key will be read from the cer-
tificate chain file.
tls.identity.
private_key_file
File containing private key (in PEM format).
At most one of private_key and private_key_file may be specified. If no private
key is specified (all values are NULL), the private key will be read from the cer-
tificate chain file.
tls.identity.
rsa_private_key
String containing additional RSA private key (in PEM format).
For use if both an RSA and non-RSA key are required for the selected cipher. At
most one of rsa_private_key and rsa_private_key_file may be specified.
At most one of rsa_private_key and rsa_private_key_file may be specified.
tls.identity.
rsa_private_key_file
File containing additional RSA private key (in PEM format).
For use if both an RSA and non-RSA key are required for the selected cipher. At
most one of rsa_private_key and rsa_private_key_file may be specified.
At most one of rsa_private_key and rsa_private_key_file may be specified.
tls.cipher.
cipher_list
List of available (D)TLS ciphers. See the OpenSSL manual page for
SSL_set_cipher_list for more information on the format of this string.
Table 29.1 Properties for NDDS_Transport_TCPv4_Property_t
Property Name
(prefix with
‘dds.transport.TCPv4.tcp1.’)
1
Description
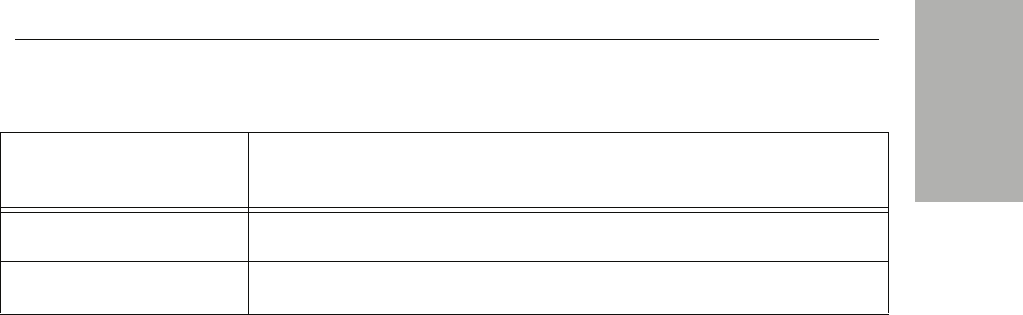
29.2 Configuring the RTI TCP Transport
29-23
29. TCP Transport
tls.cipher.
dh_param_files
List of available Diffie-Hellman (DH) key files.
tls.cipher.
engine_id
ID of OpenSSL cipher engine to request.
1. Assuming you used ‘dds.transport.TCPv4.tcp1’ as the alias to load the plugin. If not, change the prefix to match the
string used with dds.transport.load_plugins.
Table 29.1
Properties for NDDS_Transport_TCPv4_Property_t
Property Name
(prefix with
‘dds.transport.TCPv4.tcp1.’)
1
Description

Chapter 29
29-24
Index-1
Index
Symbols
@copy rtiddsgen directive 3-78
@key rtiddsgen directive 3-77
@resolve-name rtiddsgen directive 3-79
@top-level rtiddsgen directive 3-83
$NDDSHOME 3-110
A
absolute_generation_rank (DDS_SampleInfo) 7-67, 7-
70
accept_unknown_peers 8-42, 8-45, 12-12
access control 14-14
access_scope (Presentation QoS) 6-80, 6-82
ACKNACK messages 6-18, 6-44, 10-3, 10-5, 10-27
acknowledgments 6-18, 6-44
ALIVE instance state 7-69
allocation of memory 7-78
DataReaders 7-84
API message category 18-5
app ID 8-70
architectures supported i-xxii
as_Entity() 6-18, 7-23
assert_liveliness() 6-60, 6-127, 8-32
asynchronous data 7-3
autodispose_unregistered_instances
(WriterDataLifeCycle QoS)
6-162
automatic participant ID 8-69
autoregister_instances (DataWriterResouceLimits
QoS)
6-105
B
batching small samples 6-61, 6-86, 10-21
begin_coherent_changes() 6-44, 6-81
BEST_EFFORT (Reliable QoS) 6-144
best-effort delivery 10-2
blocking threads 6-105
blocking time 10-10
building applications 9-1, 9-3, 9-5
builtin data types
definition
3-7
See also data types.
See also user data types.
built-in Subscriber
14-2, 14-12
QoS 14-10
built-in topics 14-1
built-in transports 8-66
builtin_discovery_plugins (DiscoveryConfig QoS) 8-
49
BuiltinTopicReaderResourceLimits 8-50
bundling messages 10-5
C
categories of messages 18-5
channel guard filter 16-3
cleanup_period 8-39
clear() 6-16, 7-19
client-server model 1-4
clock selection 8-75
coalescing samples 6-89
coherent sets 6-44
coherent_access (Presentation QoS) 6-80 to 6-81
command-line options for rtiddsgen 3-111
COMMUNICATION message category 18-5
communications models 1-3
client-server 1-4
data-centric 2-2
DCPS 2-2, 2-11
object-centric 2-2
point-to-point 1-3
publish-subscribe 1-4, 2-8
compatibility between QoS 6-51, 7-47
compiling applications 9-1
concurrent threads 6-105
Conditions 4-37
example code 4-44
conserving CPU and bandwidth 10-24
contains_entity() 8-33
content filter 5-34
syntax for 5-23
ContentFilteredTopics 6-105
compile function 5-35
creating 5-18
custom filters 5-23, 5-34
deleting 5-20
evaluate function 5-37
filter syntax 5-23
finalize function 5-37
introduction 5-15
setting filter expressions 5-21
controlling queue depth 10-18
copy_from_topic_qos() 6-16, 6-57, 7-19, 7-53
copy() 6-16, 7-19
CPU core affinity 17-7
CPU usage 10-24
create_datawriter() 6-41
create_publisher() 6-7
create_topic() 5-4
D
data samples. See samples.
data types
2-4
supported 3-4, 3-7
DATA_AVAILABLE status 4-19, 7-24, 7-36
DATA_ON_READERS status 4-19, 7-24
DATA_READER_CACHE status 7-36
Index-2
DATA_READER_PROTOCOL status 7-37
DATA_WRITER_CACHE status 6-29
DATA_WRITER_PROTOCOL status 6-30
database cleanup thread 17-1 to 17-2
DATABASE message category 18-5
Database QoS 8-38
data-centric communications 2-2
DataReaderProtocol QoS 7-72
DataReaderResouceLimits QoS 10-15
DataReaderResourceLimits QoS 7-78
DataReaders
checking status for
7-34
copying QoS for 7-53
copying Topic QoS 7-19
creating/deleting 7-29
finding matching writers 7-53
Listeners for 7-31
memory allocation 7-84
operations on 7-25
QoS for 7-47
status for 7-35
DataWriterProtocol QoS 6-92, 10-18
DataWriterResourceLimits QoS 6-104
DataWriters
copying Topic QoS 6-15, 6-57, 7-19
creating/deleting 6-24
definition 6-3, 7-5
finding matching readers 6-59
Listener’s relationship to Publishers’ 6-16
Listeners for 6-26
operations on 6-21
ordering samples from multiple 6-110
preventing starvation 7-84
QoS for 6-49, 6-85
resource limits for 6-104
samples per 7-82
saving samples for later use 6-113
status for 6-20, 6-28 to 6-29
writing data 6-41
DCPS 2-2, 2-11
DCPSParticipant 14-1
DCPSPublication 14-1
DCPSSubscription 14-1
DDS_BuiltinTopicReaderResourceLimits_t 8-50
DDS_DATAREADER_QOS_DEFAULT 7-29
DDS_DATAREADER_QOS_USE_TOPIC 7-53
DDS_DataReaderQos structure 7-47
DDS_DATAWRITER_QOS_USE_TOPIC_QOS 6-57
DDS_ParticipantBuiltinTopicData 14-3
DDS_ReliableWriterCacheEventCount 6-38
DDS_RtpsReliableReaderProtocol_t 7-76
DDS_RtpsReliableWriterProtocol_t 6-95
DDS_SubscriberQos structure 7-12
DDS_TransportMulticastSetting_t 7-91
deadline
status for missing
6-36, 7-42
Deadline QoS 6-107
interaction with TimeBasedFilter QoS 7-88
debugging error messages 12-28, 18-3, 18-6
default QoS 4-2
delete_contained_entities() 6-9, 7-12, 7-31, 8-18
depth (History QoS) 6-119
depth of queues 10-18
destination timestamp 6-110
DestinationOrder QoS 6-110
direct_communication 11-19
direct_communication (Durability QoS) 6-114
disable_fragmentation_support(DataReaderResourceL
imits QoS)
7-79
disable_positive_acks (DataReaderProtocol QoS) 7-75
disable_positive_acks (DataWriterProtocol QoS) 6-94
disable_positive_acks_decrease_sample_keep_duratio
n_factor (RtpsReliableWriterProtocol_t)
6-97
disable_positive_acks_enable_adaptive_sample_keep_
duration (RtpsReliableWriterProtocol_t)
6-97
disable_positive_acks_increase_sample_keep_duration
_factor (RtpsReliableWriterProtocol_t) 6-97
disable_positive_acks_max_sample_keep_duration
(RtpsReliableWriterProtocol_t)
6-97
disable_positive_acks_min_sample_keep_duration
(RtpsReliableWriterProtocol_t)
6-97
Discovery
accessing Topics 8-33
finding remote DomainParticipants 8-32
discovery
debugging 12-28
definition 12-2
endpoint phase 12-3
endpoint readers/writers 12-20
entities used 12-10
late-joiners 10-27
participant phase 12-2
ports used 8-70
refresh mechanism 12-15
related QoS 12-27
summary diagram 12-26
Discovery QoS 8-42
DiscoveryConfig QoS 8-47
dispose() 6-47, 6-162
vs. unregister_instance() 6-47
disposed_generation_count (DDS_SampleInfo) 7-67,
7-70
domain ID 8-19, 8-68
domain_id_gain 12-34
DomainParticipantFactory
example code
8-4
operations on 8-5, 13-4
purpose of 8-4
QoS for 8-7, 8-9
DomainParticipantResourceLimits QoS 8-54
DomainParticipants
accessing discovered
8-32
creating 8-16
definition 8-2, 8-10
deleting 8-18
discovery of 8-50
Index-3
domain IDs 8-19, 8-68
example code 6-8, 6-53, 7-50, 8-17, 8-21, 8-25
Listener of last resort 6-17, 7-21
Listeners for 8-20
operations on 8-11
QoS for 8-22
domains
definition
2-10, 8-1
multiple 2-11, 8-2
vs. partitions 6-72
dropped samples status 7-44
Durability QoS 6-113, 6-116, 10-27
dynamic memory 8-59
dynamically_allocate_fragmented_samples(DataReade
rResourceLimits QoS)
7-81
E
enable() 4-3
enabled_transports 6-153, 8-42
enabling entities 6-64
recursiveness 4-4
end_coherent_changes() 6-44, 6-81
endpoint discovery 12-3
ENTITIES message category 18-5
EntityFactory QoS 4-4, 6-64
entityID 12-3
environment variables
NDDS_DISCOVERY_PEERS 12-4
NDDSHOME i-xxii
error messages 12-28, 18-3
format of 18-6
ERROR verbosity 18-4
Event QoS 8-61
event thread 17-1, 17-3
ExclusiveArea QoS 6-61, 6-66, 6-140
when to change 6-67
expects_inline_qos (DataReaderProtocol QoS) 7-75
expression parameters 5-21
external clock 8-75
F
factory class 4-3
fast_heartbeat_period
(RtpsReliableWriterProtocol_t)
6-95
filter expression syntax 5-23
filter expressions 5-16, 5-21
finalize_instance() 8-9
finalizeX() 3-55
find_topic() 8-30
FlowControllers
creating and deleting
6-169
external trigger 6-171
flushing batched samples 6-43, 6-61, 6-87 to 6-88
FooDataReader
definition
7-55
operations on 7-26 to 7-27
FooDataWriter
definition
6-41
operations on 6-21
FooSeq 7-65
framing Heartbeat 10-34
G
generating code
See rtiddsgen.
generation_rank (DDS_SampleInfo)
7-67, 7-70 to 7-71
get_builtin_subscriber() 14-2
get_c_version() 18-2
get_core_api_version() 18-2
get_cpp_api_version() 18-2
get_datareader_cache_status() 7-34
get_datareader_protocol_status() 7-34
get_datareaders() 7-22
get_datawriter_cache_status() 6-28
get_datawriter_protocol_status() 6-28
get_deadline_missed_status() 6-36
get_default_datawriter_qos() 6-16, 7-19
get_discovered_participant_data() 8-32
get_discovered_participants() 8-32
get_discovered_topic_data() 8-33
get_discovered_topics() 8-33
get_domain_id() 8-20
get_instance_handle() 4-6, 8-33
get_key_value() 6-48, 7-54
get_listener() 4-7
get_liveliness_changed_status() 7-34, 7-37
get_liveliness_lost_status() 6-28, 6-36
get_matched_publication_data() 7-53
get_matched_publication_datareader_protocol_status(
) 7-34
get_matched_publications() 7-53 to 7-54
get_matched_subscription_data() 6-59
get_matched_subscription_datawriter_protocol_status
_by_locator()
6-28
get_matched_subscription_datawriter_protocol_status
() 6-28
get_matched_subscription_locators() 6-59
get_matched_subscriptions() 6-59
get_offered_deadline_missed_status() 6-28
get_offered_incompatible_qos_status() 6-28, 6-37
get_output_file() 18-5
get_participant() 6-18, 7-23
get_publication_match_status() 6-28
get_qos() 4-8, 6-52
get_reliable_reader_activity_changed_status() 6-28
get_reliable_writer_cache_changed_status() 6-28
get_requested_deadline_missed_status() 7-34, 7-42
get_requested_incompatible_qos_status() 7-34, 7-43
get_sample_lost_status() 7-34, 7-44
get_sample_rejected_status() 7-34, 7-44
get_status_changes() 4-6, 4-18, 4-21, 6-28, 7-34
get_statuscondition() 4-50, 7-34
get_subscription_match_status() 7-34, 7-46
Index-4
get_trigger_value() 4-37
get_verbosity() 18-5
getting data 7-3 to 7-4, 7-31, 7-36, 7-57, 7-65
GroupData QoS 6-69
GUID (Globally Unique ID) 6-133, 8-70, 12-3
H
hash table 3-77, 6-94, 6-147, 8-55, 8-57
HB messages. See heartbeats.
heartbeat_period 10-19
diagram 10-20
heartbeat_period (RtpsReliableWriterProtocol_t) 6-95,
6-99
heartbeat_suppression_duration
(DDS_RtpsReliableReaderProtocol_t)
7-76
Heartbeats
types of
10-34
heartbeats 10-5
controlling 10-18
how many resent 10-22
how often 10-19
response delays 7-76
heartbeats_per_max_samples 10-21
diagram 10-23
heartbeats_per_max_samples
(RtpsReliableWriterProtocol_t)
6-96
high_watermark (RtpsReliableWriterProtocol_t) 6-95
historical data 6-113, 7-35, 10-28
HISTORY QoS 10-18
History QoS 6-118
depth 10-18
effect of ResourceLimits QoS 6-120
history_depth (DurabilityService QoS) 6-117
history_kind (DurabilityService QoS) 6-117
host ID 8-70
I
IDL 2-4, 3-52
including other files 3-76
supported types 3-57, 3-63, 3-66
unsupported types 3-53
ignore_participant() 14-13
ignore_publication() 7-54, 14-13
ignore_publisher() 6-70, 6-160
ignore_subscription() 6-59, 14-13
ignore_topic() 8-33, 14-13
implicit Publishers 6-6, 7-9
inactivate_nonprogressing_readers
(RtpsReliableWriterProtocol_t)
6-95
incompatible QoS
status for
6-37
info units 7-79
inheriting QoS profiles 15-20
initial and maximum values in QoS 7-78, 7-84
initial peers list 12-4
initial_batches (DataWriterResouceLimits QoS) 6-105
initial_concurrent_blocking_threads
(DataWriterResourceLimits QoS)
6-105
initial_fragmented_samples(DataReaderResourceLimit
s QoS) 7-80
initial_infos (DataReaderResourceLimits QoS) 7-79
initial_instances (ResourceLimits QoS) 6-147
initial_outstanding_reads (DataReaderResourceLimits
QoS)
7-79
initial_participant_announcements (DiscoveryConfig
QoS) 8-48
initial_peers 8-42
adding to 8-43
initial_records 8-39
initial_remote_virtual_writers_per_instance(DataRead
erResourceLimits QoS)
7-82
initial_remote_writers (DataReaderResourceLimits
QoS)
7-79
initial_remote_writers_per_instance
(DataReaderResourceLimits QoS) 7-79
initial_samples (ResourceLimits QoS) 6-147
initial_weak_references 8-40
instance handle 4-6
instance ID 8-70
instance state 7-69
interaction with Ownership QoS 7-69
instance states 6-48
instance_handle (DDS_SampleInfo) 7-67
instance_hash_buckets (ResourceLimits QoS) 6-147
instance_replacement (DataWriterResouceLimits
QoS)
6-105
instance_state (DDS_SampleInfo) 7-67
instances
registration
6-45
registration example 6-47
Interface Description Language. See IDL
internal clock
8-75
inter-participant reader/writer 12-18
K
keep duration 6-100, 10-26
key hash 6-94, 6-147, 8-55, 8-57
key-hash 3-77, 6-94
keys
definition
6-45
getting value of 6-48
in IDL file 3-77
managing data instances 6-45
registering instances 6-45
rtiddsgen 3-77
L
last_reason (SAMPLE_REJECTED status) 7-45
late_joiner_heartbeat_period
(RtpsReliableWriterProtocol_t)
6-95
late-joiners 10-27
discovery of 12-24
Index-5
latency 7-77
layer 2 switches 16-5
lease_duration (Liveliness QoS) 6-126
LENGTH_UNLIMITED 8-40
Listeners
basic steps
7-3
creating and deleting 4-29
definition 6-16
example code 6-19, 7-22, 7-33, 8-21
for DataReaders 7-31
for DataWriters 6-26
for DomainParticipants 8-20
for Publishers 6-16
for Topics 5-10
last resort 6-17, 7-21, 8-20
nil (or no-op) 4-29
operations allowed in 4-32
precedence of 6-17, 6-27, 7-21
purpose of 4-19
relationship of PublisherListener and
DataWriterListener
6-16
removing 8-20
listening for data 7-3
liveliness assertion during write() 6-42
LIVELINESS_CHANGED status 6-39, 7-37
LIVELINESS_LOST status 6-36
locators (TransportUnicast QoS) 6-154
logged error messages 18-3
long double 3-73 to 3-74
lookup_datareader() 6-18, 7-23, 14-2, 14-12
lookup_instance() 6-48, 7-54
lookup_participant() 8-9
lookup_topicdescription() 8-29 to 8-30
lost samples 7-44
low_watermark (RtpsReliableWriterProtocol_t) 6-95
low-bandwidth connections 7-89
M
matching writers and readers 6-37, 6-59, 7-42, 7-53,
12-3
status for 7-46
max_batches (DataWriterResouceLimits QoS) 6-105
max_blocking_time (Reliability QoS) 6-106, 6-143, 10-
10
max_bytes_per_nack_response
(RtpsReliableWriterProtocol_t) 6-97, 10-22
max_concurrent_blocking_threads
(DataWriterResourceLimits QoS)
6-105
max_data_bytes (Batch QoS) 6-86
max_flush_delay (Batch QoS) 6-86
max_fragmented_samples_per_remote_writer(DataRe
aderResourceLimits QoS)
7-80
max_fragmented_samples(DataReaderResourceLimits
QoS)
7-80
max_fragments_per_sample(DataReaderResourceLimi
ts QoS)
7-80
max_heartbeat_response_delay
(RtpsReliableReaderProtocol_t)
7-76
max_heartbeat_response_delay(DDS_RtpsReliableRea
derProtocol_t) 7-76
max_heartbeat_retries
(RtpsReliableWriterProtocol_t)
6-95, 10-22
max_infos (DataReaderResourceLimits QoS) 7-79
max_instances (DurabilityService QoS) 6-117
max_instances (ResourceLimits QoS) 6-147, 7-83
max_liveliness_loss_detection_period
(DiscoveryConfig QoS)
8-48
max_nack_response_delay (DataWriterProtocol
QoS) 10-24
max_nack_response_delay
(RtpsReliableWriterProtocol_t)
6-96
max_outstanding_reads (DataReaderResourceLimits
QoS)
7-79
max_remote_reader_filters (DataWriterResouceLimits
QoS) 6-105
max_remote_virtual_writers_per_instance(DataReader
ResourceLimits QoS)
7-81
max_remote_writers (DataReaderResourceLimits
QoS)
7-79
max_remote_writers_per_instance
(DataReaderResourceLimits QoS) 7-78 to 7-79
max_samples (Batch QoS) 6-86
max_samples (DurabilityService QoS) 6-117
max_samples (ResourceLimits QoS) 6-38, 6-147, 10-21
max_samples_per_instance (DurabilityService QoS) 6-
117
max_samples_per_instance (ResourceLimits QoS) 6-
147, 10-18
max_samples_per_read(DataReaderResourceLimits
QoS) 7-79
max_samples_per_remote_writer 10-15
max_samples_per_remote_writer
(DataReaderResourceLimits QoS) 7-79, 7-82 to 7-83
max_send_window_size
(RtpsReliableWriterProtocol_t)
6-98
max_skiplist_level 8-39
max_total_instances (DataReaderResourceLimits
QoS)
7-81, 7-83
max_weak_references 8-40
maximizing throughput 7-77
memory
allocation 3-54, 7-78, 7-84, 8-58
clearing 6-16, 7-19
copying 7-19
returning 8-9
message bundling 10-5
message storms 10-27
meta data
ports for
12-32
meta-traffic 8-42
definition 17-5
metatraffic_transport_priority 8-42, 8-45
min_heartbeat_response_delay
(RtpsReliableReaderProtocol_t)
7-76
Index-6
min_nack_response_delay
(RtpsReliableWriterProtocol_t)
6-96
min_send_window_size
(RtpsReliableWriterProtocol_t) 6-98
minimizing latency 7-77
minimum_separation
reasons for changing
7-89
minimum_separation (TimeBasedFilter QoS) 7-87, 7-
89
missed deadline status 6-36, 7-42
missing samples status 7-44
module (IDL type) 3-61, 3-66, 3-72
monotonic clock 8-75
multicast
addresses
7-90, 8-44
example code 7-92
locators 7-90
ports 7-90
ports used 12-32
TransportMulticast QoS 7-90
multicast_receive_addresses 8-42, 8-44
N
nack_suppression_duration
(RtpsReliableWriterProtocol_t) 6-97
NACKs
non-progressing
10-24
namespace (rtiddsgen option) 3-113
NDDS_Config_LibraryVersion_t structure 18-3
NDDS_DISCOVERY_PEERS 12-4
NDDSConfigLogger class 18-5
operations on 18-5
NDDSConfigVersion class 18-2
NDDSHOME i-xxii
NEW view state 7-68
new_remote_participant_announcement_period
(DiscoveryConfig QoS) 8-48
nil listener 4-29
no_writers_generation_count (DDS_SampleInfo) 7-67,
7-70
non-progressing NACK 10-24
NOT_ALIVE_DISPOSED instance state 7-69
NOT_ALIVE_NO_WRITERS instance state 6-48, 7-69
NOT_NEW view state 7-68
NOT_READ sample state 7-68
notification of new data 7-31
O
object-centric communications 2-2
offered QoS 6-51
OFFERED_DEADLINE_MISSED status 6-36
OFFERED_INCOMPATIBLE_QOS status 6-37
on_data_available() 7-32, 7-36
on_data_on_readers() 7-24
on_instance_replaced() 6-27
on_liveliness_changed() 7-32, 7-37
on_liveliness_lost() 6-27, 6-36
on_offered_deadline_missed() 6-27, 6-36
example 6-19
on_offered_incompatible_qos() 6-27, 6-37
on_publication_matched() 6-27
on_reliable_reader_activity_changed() 6-27
on_reliable_writer_cache_changed() 6-27
on_requested_deadline_missed() 7-32, 7-42
on_requested_incompatible_qos() 7-32, 7-43
on_sample_lost() 7-32, 7-44
on_sample_rejected() 7-32, 7-44
on_subscription_matched() 7-32, 7-46
order of samples 6-110
ordered_access (Presentation QoS) 6-80 to 6-81
effect of 6-83
ownership of data 7-57
effect of unregistering 6-46
Ownership QoS
effect of sharing 7-84
effect on instance state 7-69
preventing starvation 7-84
OwnershipStrength QoS 6-136
P
packet loss 10-14
participant DATA messages 12-2, 12-12, 12-15
participant ID 8-68 to 8-69
participant_assert_liveliness_period 12-12
participant_id (WireProtocol QoS) 8-67
participant_id_gain 12-34
participant_liveliness_assert_period 12-12
participant_liveliness_assert_period (DiscoveryConfig
QoS)
8-47
participant_liveliness_assert_period (DisocveryConfig
QoS)
8-50, 8-53
participant_liveliness_lease_duration
(DiscoveryConfig QoS) 8-47
participant_liveliness_lease_duration_period
(DiscoveryConfig QoS)
12-12
participant_reader_resource_limits (DiscoveryConfig
QoS)
8-48
ParticipantBuiltinTopicData 14-14
Partition QoS 6-72
example 6-76
example of changing 6-76
impact on memory 6-79
partitions
definition
6-72
rules for matching names 6-74
vs. domains 6-72
wildcards 6-74
peers list 12-2, 12-4
adding to 8-43
peer-to-peer communication 11-19
performance
improving with registration
6-45
period (Deadline QoS) 6-107
Index-7
piggyback heartbeats 10-21
plain communication status 4-19, 7-24
PLATFORM message category 18-5
platforms supported i-xxii
plugin_data 6-158
pointer (IDL type) 3-58, 3-68
point-to-point communication 1-3
polling for data 7-3 to 7-4
port numbers 8-68
ports 8-70, 12-32 to 12-33
preprocessor directives 3-76, 3-114
Presentation QoS 6-79
preventing starvation 7-84
promiscuous mode 7-93
Property QoS 6-137, 8-34
PRSTDataReader 11-19, 22-1, 22-13
PRSTDataWriter 11-19, 22-1, 22-13
publication DATA messages 12-3
publication_handle (DDS_SampleInfo) 7-67
PUBLICATION_MATCHED status 6-37
publication_reader (DiscoveryConfig QoS) 8-49
publication_reader_ resource_limits 8-48
publication_squence_number (DDS_SampleInfo) 7-67
publication_writer 8-49
publications 2-9
definition 2-9
Publishers
creating 6-7
definition 2-8, 6-3
deleting 6-9, 8-18
example Listener 6-19
implicit 6-6, 7-9
Listener’s relationship to DataWriters’ Listener 6-16
Listeners for 6-16
operations on 5-20, 6-5, 6-165
QoS for 6-10, 6-60
setting QoS for 6-9
publish-subscribe communications 1-4, 2-8
pulled samples 6-30
push_on_write (DataWriterProtocol QoS) 6-93
when to change 6-103
pushed samples 6-30
Q
QoS
changing defaults 4-2
compatibility 6-37, 6-51, 7-47
Database 8-38
DataReaderProtocol 7-72
DataReaderResourceLimits 7-78
DataReaders 7-47
DataWriterProtocol 6-92, 10-18
DataWriterResourceLimits 6-104
Deadline 6-107
defaults 4-2
DestinationOrder 6-110
Discovery 8-42
DiscoveryConfig 8-47
DomainParticipantResourceLimits 8-54
Durability 6-113, 6-116, 10-27
EntityFactory 6-64
Event 8-61
ExclusiveArea 6-61, 6-66, 6-140
for built-in Subscribers and DataReaders 14-10
for DataWriters 6-49, 6-85
for DomainParticipantFactory 8-7, 8-9
for DomainParticipants 8-22
for Publishers 6-60
for Topics 5-12
GroupData 6-69
History 6-118, 10-18
how to set 4-8
offered 6-51
OwnershipStrength 6-136
Partition 6-72
Property 6-137, 8-34
Publishers 6-9
ReceiverPool 8-64
Reliability 6-142
requested 6-51
ResourceLimits 6-146
rules for setting 4-9
Subscribers 7-12, 7-72
summary table 4-13
TimeBasedFilter 7-87
TransportBuiltin 8-66
TransportMulticast 7-90
TransportPriority 6-151
TransportSelection 6-152
TransportUnicast 6-154
TypeSupport 6-157
UserData 6-158
using defaults 7-29
using Topic’s 7-53
WireProtocol 8-67
QoS. See Also individual QoS policy names.
Quality of Service. See QoS
queue depths
10-18
R
read communication status 4-19, 7-24, 7-36
READ sample state 7-68
read_instance() 7-54, 7-61, 7-63
read_next_instance() 7-62
read_next_sample() 7-61
read() vs. take() 7-57
reading data 7-57
real-time applications
features of
2-2
realtime clock 8-75
receive queue 10-2
example 10-17
size 6-147, 10-11, 10-13, 10-15, 10-18
receive thread 8-64, 17-1, 17-4
Index-8
receive_address (DDS_TransportMulticastSetting_t) 7-
91
receive_port (DDS_TransportMulticastSetting_t) 7-91
receive_port (TransportUnicast QoS) 6-155
ReceiverPool QoS 8-64
receiving data 7-31, 7-36, 7-57, 7-65
basic steps 7-3 to 7-4
reception_timestamp (DDS_SampleInfo) 7-67
refilter (History QoS) 6-119
register_instance() 6-45 to 6-46, 6-48
rejected samples 7-45
relay communication 11-19
Reliability QoS 6-142
effect on bandwidth 6-146
reliable delivery 6-142, 10-2
blocking time 10-10
definition 10-2
diagram 10-7
strict 10-18
tuning 10-9
RELIABLE_READER_ACTIVITY_CHANGED
status
6-39
RELIABLE_WRITER_CACHE_CHANGED status 6-
38
remote_participant_purge_kind (DiscoveryConfig
QoS)
8-48
repair packages 10-22
replace_empty_instances (DataWriterResouceLimits
QoS)
6-105
requested QoS 6-51
REQUESTED_DEADLINE_MISSED status 7-42
REQUESTED_INCOMPATIBLE_QOS status 7-43
resource configuration 7-78
resource limits 7-78
ResourceLimits QoS 6-146
effect on History QoS 6-120
response delays 7-76
restricting communication 14-13
retries
controlling 10-18
RTI Data Distribution Service version query 18-1
rtiddsgen
@copy directive 3-78
@key directive 3-77
@resolve-name directive 3-79
@top-level directive 3-83
command-line options 3-111
directives 3-76
generated files 3-108 to 3-109
IDL conversions 3-57, 3-63, 3-66
including IDL files 3-76
support types 3-57, 3-63, 3-66
syntax 3-111
RTPS protocol 8-67, 10-4
basic behavior diagram 10-6
bundling messages 10-5
reliable behavior diagram 10-7
rtps_app_id 12-27
rtps_app_id (WireProtocol QoS) 8-68
rtps_auto_id_kind (WireProtocol QoS) 8-68
rtps_host_id 12-27
rtps_host_id (WireProtocol QoS) 8-68
rtps_instance_id (WireProtocol QoS) 8-68
rtps_object_id (DataReaderProtocol QoS) 7-74
rtps_object_id (DataWriterProtocol QoS) 6-93
rtps_reliable_reader (DataReaderProtocol QoS) 7-76
rtps_reliable_writer (DataWriterProtocol QoS) 6-94
rtps_reserved_ports_mask (WireProtocol QoS) 8-68
rtps_well_known_ports (WireProtocol QoS) 8-68
RxO 6-51
S
sample state 7-68
SAMPLE_LOST status 7-44
sample_rank (DDS_SampleInfo) 7-70 to 7-71
sample_rank (SampleInfo) 7-67
SAMPLE_REJECTED status
reason codes
7-45
sample_state (DDS_SampleInfo) 7-67
SampleInfo structure 7-67
samples
coherent sets
6-44
count of lost 7-44
definition 2-5, 2-7
how many per DataWriter 7-82
lost 7-44
notification of arrival 7-36
order of delivery 6-110
ownership of data 7-57
reasons for rejection 7-45
resending 10-22, 10-24
saving for later use 6-113
structure of 7-67
unacknowledged 6-38
writing 6-41
send queue
blocking time
10-10
max_samples 10-13
purpose of 10-2
size 6-119, 6-147, 10-11 to 10-12, 10-14 to 10-15, 10-
18
size (formula) 10-13 to 10-14
unblocking when full 6-106
send_window_decrease_factor
(RtpsReliableWriterProtocol_t)
6-98
send_window_increase_factor
(RtpsReliableWriterProtocol_t)
6-98
send_window_update_period
(RtpsReliableWriterProtocol_t)
6-98
sending data. See writing data.
sequence data type
3-54, 7-65
sequence number 7-67
sequences (defined) 7-65
service_cleanup_delay (DurabilityService QoS) 6-117
set_default_datawriter_qos() 4-9
Index-9
set_enabled_statuses() 4-49
set_listener() 4-7
set_output_file() 18-5
set_qos() 4-8, 6-52
set_verbosity() 18-5
shared ownership
effect of max_samples_per_remote_writer
7-83
shutdown_cleanup_period 8-39
shutdown_timeout 8-39
SILENT verbosity 18-4
skip list 8-39
source timestamp 6-110
source_timestamp (DDS_SampleInfo) 7-67
source_timestamp_resolution (Batch QoS) 6-87
speculative caching 10-41
SQL syntax 5-23
starvation 7-83
static memory allocation 8-59
status changes 7-34
STATUS_ALL verbosity 18-4
STATUS_LOCAL verbosity 18-4
STATUS_REMOTE verbosity 18-4
statuses
changes in
4-22
DATA_AVAILABLE 4-19, 7-24, 7-36
DATA_ON_READERS 4-19, 7-24
DATA_READER_CACHE 7-36
DATA_READER_PROTOCOL 7-37
DATA_WRITER_CACHE 6-29
DATA_WRITER_PROTOCOL 6-30
for DataReaders 7-34 to 7-35
for DataWriters 6-20, 6-28 to 6-29
for Subscribers 7-24
LIVELINESS_CHANGED 7-37
LIVELINESS_LOST 6-36
OFFERED_DEADLINE_MISSED 6-36
OFFERED_INCOMPATIBLE_QOS 6-37
plain communication status 4-19
PUBLICATION_MATCHED 6-37
read communication status 4-19
RELIABLE_READER_ACTIVITY_CHANGED 6-39
RELIABLE_WRITER_CACHE_CHANGED 6-38
REQUESTED_DEADLINE_MISSED 7-42
REQUESTED_INCOMPATIBLE_QOS 7-43
SAMPLE_LOST 7-44
SUBSCRIPTION_MATCHED 7-46
stock quote example 2-5 to 2-6
string data type 3-6
submessage bundling 10-5
Subscribers
creating
7-10
definition 2-9, 7-5
operations on 7-7
QoS for 7-12, 7-72
statuses for 7-24
SUBSCRIPTION_MATCHED status 7-46
subscription_reader (DiscoveryConfig QoS) 8-49
subscription_reader_resource_limits (DiscoveryConfig
QoS)
8-48
subscription_writer (DiscoveryConfig QoS) 8-49
subscriptions
notification timing
7-88
supported data types 3-4, 3-7
T
take_instance() 7-54
take() vs. read() 7-57
taking data 7-57
thread_safe_write (Batch QoS) 6-87
thread-pinning 17-7
threads 6-105
receive 8-64
shared/exclusive areas for 6-61, 6-66, 6-140
unblocking 6-106
throughput 7-77
TimeBasedFilter QoS 7-87
interaction with Deadline QoS 7-88
timestamp 6-42, 6-110
timestamp resolution 6-87, 6-90
timestamp tolerance 6-111
timestamps 8-75
to_string() 18-2
topic_name
definition
5-4
Topics 2-9
accessing discovered 8-33
copying QoS 6-15, 7-19
creating 5-4
definition 2-5, 2-7
example code 6-12, 6-53 to 6-54, 7-14, 7-51, 8-26
Listeners for 5-10
operations on 5-3
purpose of 5-2
purpose of QoS 5-12
QoS for 5-6, 5-12
waiting for creation 8-30
TRANSIENT_LOCAL (Durability QoS) 6-113 to 6-114
transport plug-ins
for meta-traffic
8-42
TransportBuiltin QoS 8-66
TransportMulticast QoS 7-90
TransportPriority QoS 6-151
transports (TransportMulticast QoS) 7-91
transports (TransportUnicast QoS) 6-155
TransportSelection QoS 6-152
TransportUnicast QoS 6-154
trigger_value 4-37, 4-49
type_code_max_serialized_length
(DomainParticipantsResourceLimits QoS)
8-57
type_name
definition
5-4
typedef construct 3-74
TypeSupport QoS 6-157
typographical conventions i-xxii
Index-10
U
unacknowledged samples 6-38
unicast 6-154
ports used 12-33
unregister_instance() 6-46
vs. dispose() 6-47
unregister() 6-162
unregistering instances
instance ownership after
6-46
unsigned types 3-74
use_shared_exclusive_area (ExclusiveArea QoS) 6-67
user data
ports for 12-33
user data types
definition
3-4
See also data types.
UserData QoS
6-158
V
valid_data (DDS_SampleInfo) 7-67
verbosity 18-3
version of RTI Data Distribution Service 18-1
view state 7-68
view_state (DDS_SampleInfo) 7-67
virtual GUID 11-6
virtual_guid (DataReaderProtocol QoS) 7-74
virtual_guid (DataWriterProtocol QoS) 6-93
VOLATILE (Durability QoS) 6-113 to 6-114
W
wait_for_acknowledgments() 6-18, 6-44
wait_for_historical_data() 7-35
waiting for data 7-3
WaitSets 4-37
creating and deleting 4-38
example code 4-44
operations on 4-41
properties for 4-38
purpose of 4-37
WARNING verbosity 18-4
wchar 3-74
weak references 8-40
well_known_ports 8-70
wildcard partition names 6-74
WireProtocol QoS 8-67
write_w_timestamp() 6-42
writing data 6-41
basic steps 6-1
blocked send queue 10-11
example with registration 6-47
liveliness assertion 6-42
registration of instance 6-45
